
MUSCLES’ CO-ACTIVATION IN A STATIONARY LIMB
ALTERES ACCORDING TO THE MOVEMENT OF OTHER
LIMB
Hossein Mousavi Hondori
1
, Ling Shih-Fu
1
and Reza Khosrowabaldi
2
1
School of Mechanical and Aerospace Engineering, Nanyang Technological University,50 Nanyang Avenue, Singapore
2
School of Computer Science and Engineering, Nanyang Technological University,50 Nanyang Avenue, Singapore
Keywords: Electromyography, Posture, Motor control, Muscle co-contraction.
Abstract: This paper reports an interesting phenomenon of observable muscle co-contraction in stationary limbs
according to the movement pattern in an oscillating limb. In the experiments the subject's electromyography
signals of biceps and triceps of both left and right arm are recorded. Two experiments were conducted
which are different in the posture of left and right arm. The first experiment is conducted when both
forearms are in upright posture. In the second experiment though, the right forearm is moving. It was
observed that the EMG of both biceps and triceps (i.e. co-activation) of the stationary limb follow that of the
opposite moving limb. The reason can be addressed by the necessity of stabilizing the stationary limb when
one executes motion in the counter limb. Moreover it can possibly be due to post-intention, pre-motion
brain activities that may fire the muscles of both limbs similarly.
1 INTRODUCTION
Hogan (Hogan, 1984) emphasized how antagonist
muscle’s co-activation in forearm’s upright posture
might help with the posture control. He showed that
the co-activation sets the mechanical impedance of
the elbow joint and postulated that this is what the
co-activation is meant to do. Later Burdet (Burdet et
al, 2001) proved that human learns to stabilize
unstable dynamics by optimizing mechanical
impedance. Conclusively, unstable tasks require
impedance optimization and the impedance is set by
co-activation of a pair of muscles (i.e. agonist and
antagonist). Is this co-activation only considerable in
unstable dynamics? A recent study (Darainy et al,
2008) on EMG patterns of dynamic learning of
stable tasks also reveals a considerable portion of
co-activation. Therefore, the CNS co-contracts the
antagonists not only in unstable dynamics, but also it
does in all tasks (Mousavi et al, 2009).
So far it was proven that this co-activation or
mechanical impedance adjustment is required from
the perspective of controlling one limb (Hogan,
1984) and (Burdet et al, 2001). However in this
paper we report a seemingly meaningful co-
activation in a stationary limb when the counter limb
is moving.
2 EXPERIMENTAL
OBSERVATION
The co-activation of antagonist muscle is linking and
relating to optimal impedance. Co-activation occurs
in both stable and unstable tasks regardless of the
fact that in stable tasks impedance is not as
necessary.
In an experimental study we recorded the EMG of
biceps and triceps of both arms during two tasks
including:
• Both forearms were in upright posture
(stationary)
• Left forearm is in upright posture
(stationary)Right forearm was moving
(flexor-extensor)
163
Mousavi Hondori H., Shih-Fu L. and Khosrowabadi R. (2010).
MUSCLES’ CO-ACTIVATION IN A STATIONARY LIMB ALTERES ACCORDING TO THE MOVEMENT OF OTHER LIMB.
In Proceedings of the Third International Conference on Biomedical Electronics and Devices, pages 163-165
DOI: 10.5220/0002698901630165
Copyright
c
SciTePress
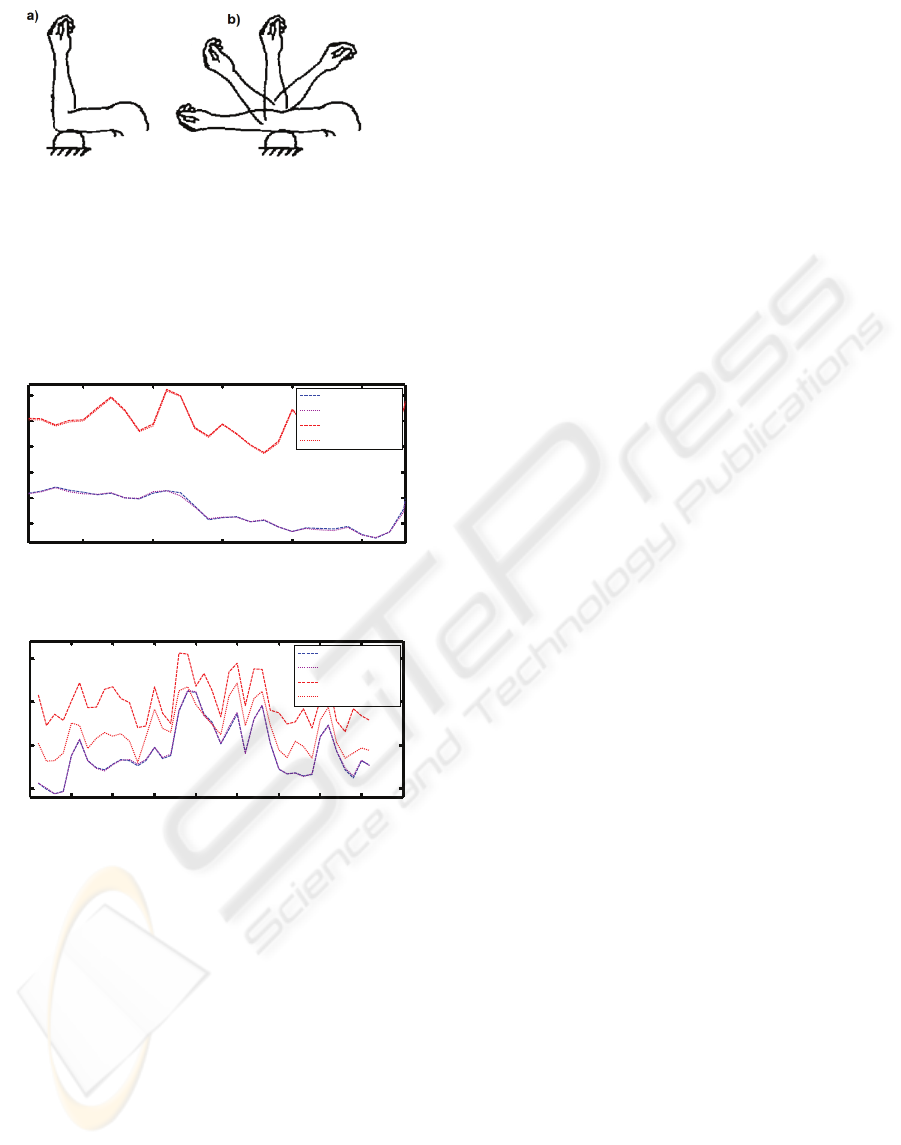
Figure 1: a) upright stationary posture b) elbow flexion-
extension.
The EMG signal when both forearms are in upright
posture (Figure 1.a) is shown in Figure 2. In Figure
3, however, we find the same muscles’ EMG when
left arm remains upright stationary but the right
forearm moves according to Figure 1.b.
5 10 15 20 25
0.04
0.05
0.06
0.07
0.08
0.09
Time
(
sec
)
EMG (volt)
Bicepce-Left
Tricepce-Left
Bicepce-Right
Tricepce-Right
Figure 2: EMG of right and left arm when both arms are
upright stationary.
0 5 10 15 20 25 30 35 40 45
0.05
0.1
0.15
0.2
Time (sec)
EMG (volt)
Becepce-Left
Tricepce-Left
Bicepce-Right
Tricepce-Right
Figure 3: EMG when left arm remains upright stationary
and right arm moves.
Comparing the two situations we can observe that
the EMG in the stationary limb (left arm) is
considerably affected by that of the moving limb
moreover biceps and triceps of the stationary arm
are co-activated with almost the same amount.
3 HYPOTHESIZING
It can be postulated that the source of the co-
activation of the muscles in the stationary limb is to
feel secure about the performance of the moving
limb. If the stationary limb remains more stable
against possible perturbations, in case of
perturbation less correction and hence computation
would be needed. Then the task which is intended to
be done by the opposite limb is performed with more
comfort and concentration. In a word, we spend
more energy to fire the muscles of a stationary limb
so as to avoid excessive computing.
4 APPLICATION
Stroke patients mostly suffer from hemiplegia; they
lose some of the motor neurons with their associated
information that leave them with one side affected
and one side intact. Recovery rate has been reported
significant when a stroke patient move the healthy
limb and a robot imitating the motion apply the same
pattern to the affected limb (Burgar et al, 2000),
(Luft et al, 2004), and (Hesse et al, 2003). The
reason why this accelerates the recovery is not clear
yet. However, our finding might help address this
question.
We observed that when one moves a limb, the CNS
also sends some signals to the other limb even if it is
in a static posture. The signal might not be as
powerful to move it or more probably the signal
might not meant to move it; instead it could be to
make sure that the resting limb is going to stay in the
static posture.
Now let’s imagine that every time the stroke
subject’s arm is driven by the robot there have been
some signals to fire the muscles already. That can be
the reason why a stroke patient’s recovery process is
faster when they move undergo mirror image
movement enabler system.
ACKNOWLEDGEMENTS
Hereby we would like to acknowledge the School of
Mechanical and Aerospace Engineering at Nanyang
Technological University and the M&C Lab in
especial.
REFERENCES
Burdet E, Osu R, Franklin DW, Milner TE, Kawato M.,
2001. The CNS Skillfully Stabilizes Unstable
Dynamics by Learning Optimal Impedance. Nature,
414: 446-9.
Burgar C G , Lum PS, Shor PC, Machiel Van der Loos
HF., 2000. Development of robots for rehabilitation
therapy: The Palo Alto VA/Stanford experience. J
Rehabil Res Dev. 37(6):663-73.
BIODEVICES 2010 - International Conference on Biomedical Electronics and Devices
164

Darainy M., Ostry D., 2008. Muscle cocontraction
following dynamics learning, Exp Brain Res
190:153–163.
Hesse S, Schulte-Tigges G , Konrad M, Bardeleben A,
Werner C., 2003. Robot-assisted arm trainer for the
passive and active practice of bilateral forearm and
wrist movements in hemiparetic subjects. Arch Phys
Med Rehabil. 84(6): 915-20.
Hogan N., 1984. Adaptive Control of Mechanical
Impedance by Coactivation of Antagonist Muscles,
IEEE Transaction on Automatic Control, vol. AC-29,
no. 8.
Luft AR, McCombe-Waller S, Whitall J, Forrester LW,
Macko R, Sorkin JD, Schulz JB, Goldberg AP, Hanley
DF, 2004. Repetitive bilateral arm training and motor
cortex activation in chronic stroke: a randomized
controlled trial. JAMA. 292(15):1853-61. Erratum in:
JAMA. 292(20):2470.
Mousavi Hondori H., Ling S-F, 2009. A Method for
Measuring Human Arm’s Mechanical Impedance for
Assessment of Motor Rehabilitation. 3rdInternation
Convention on Rehabilitation and Assisstance
Technology, i-CREATe
MUSCLES' CO-ACTIVATION IN A STATIONARY LIMB ALTERES ACCORDING TO THE MOVEMENT OF
OTHER LIMB
165
