
A STUDY OF A CONSCIOUS ROBOT
An Attempt to Perceive the Unknown
Soichiro Akimoto and Junichi Takeno
Robot Science Laboratory, Meiji University, 1-1-1 Higashimita, Tama-ku, Kawasaki-shi, Kanagawa, 214-8571, Japan
Keywords: Cognition and Behavior, Consciousness, Pain of the heart, Detecting unknown, Neural Networks, Robotics.
Abstract: The authors are developing a robot that has consciousness, emotions and feelings like humans. As we make
progress in this study, we look forward to deepening our understanding of human consciousness and
feelings. So far, we have succeeded in representing consciousness in a robot, evolved this conscious system
by adding the functions of emotions and feelings, and successfully performed mirror image cognition
experiments using the robot. Emotions and feelings in a robot are, like those of humans, basic functions that
can enable a robot to avoid life-threatening situations. We believe that consistency of cognition and
behavior generates consciousness in a robot. If we can detect what happens in the robot when this
consistency is lost, we may be able to develop a robot that is capable of discriminating between what it has
learned and what it has not learned. Furthermore, anticipate that the robot may eventually be able to feel a
“pain of the heart.” This paper reports on autonomous detection by a robot of non-experienced phenomena,
or awareness of the unknown, using the function of consciousness embedded in the robot. If the robot is
capable of detecting unknown phenomena, it may be able to continually accumulate experiences by itself.
1 INTRODUCTION
We have already defined our belief that
consciousness is generated from consistency of
cognition and behavior. Based on this definition, we
have developed a conscious system using recurrent
neural networks (Suzuki, 2005). We then
incorporated this conscious system into a robot, and
the robot performed successfully in experiments on
imitation behavior and mirror image cognition, or
so-called mirror tests (Igarashi, 2007) ,(Takeno,
2008).
The present paper reports on our development of
a robot that is capable of detecting a situation that it
has never experienced before and representing a
“heartfelt discomfort” or anxiety such as
unpleasantness (a feeling) or pain (an emotion)
according to the stimuli occurring in such a
situation.
By developing a robot having these functions
and creating a new model of the human brain based
on the robot, the authors would like to demonstrate
that it is possible to provide medical information on
treatment of human brain diseases and develop a
robot having a function very close to that of human
consciousness in the near future.
2 PAIN OF THE HEART
This chapter first introduces phantom pain. A patient
who has had a limb amputated due to injury or
disease may feel as though the limb still existed as it
was before amputation and may feel pain in the
nonexistent limb. (
Ramachandran, 1999)
The authors believe that the patient feels pain at
the invisible and nonexistent limb because the brain
cannot cognize the actual situation correctly, or what
is cognized by the brain is different from the real
world. The authors hypothesized that this cognitive
gap generates unpleasant, and leads to a feeling of
pain. If this hypothesis is true, we might then say
that phantom pain—a feeling of unpleasant—occurs
when the consistency of cognition and behavior (the
definition of consciousness used by the authors used
throughout our study) is lost.
The authors define the unpleasant and pain that
occur when consistency of cognition and behavior is
lost as “pain of the heart” for the purpose of
elucidating phantom pain. We call this “pain of the
heart” because it is the working of the reason
subsystem whereas bodily pain is a result of physical
stimuli, such as when the body collides with some
external object.
498
Akimoto S. and Takeno J. (2010).
A STUDY OF A CONSCIOUS ROBOT - An Attempt to Perceive the Unknown.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Artificial Intelligence, pages 498-501
DOI: 10.5220/0002704904980501
Copyright
c
SciTePress
Unpleasant arising from perception of the
unknown, as discussed in this paper, is one of the
“pain of the heart.”
3 STRUCTURE OF A MONAD
A MoNAD is a conscious module developed by the
authors. It is a computational model for studying
consciousness using neural networks (NNs).
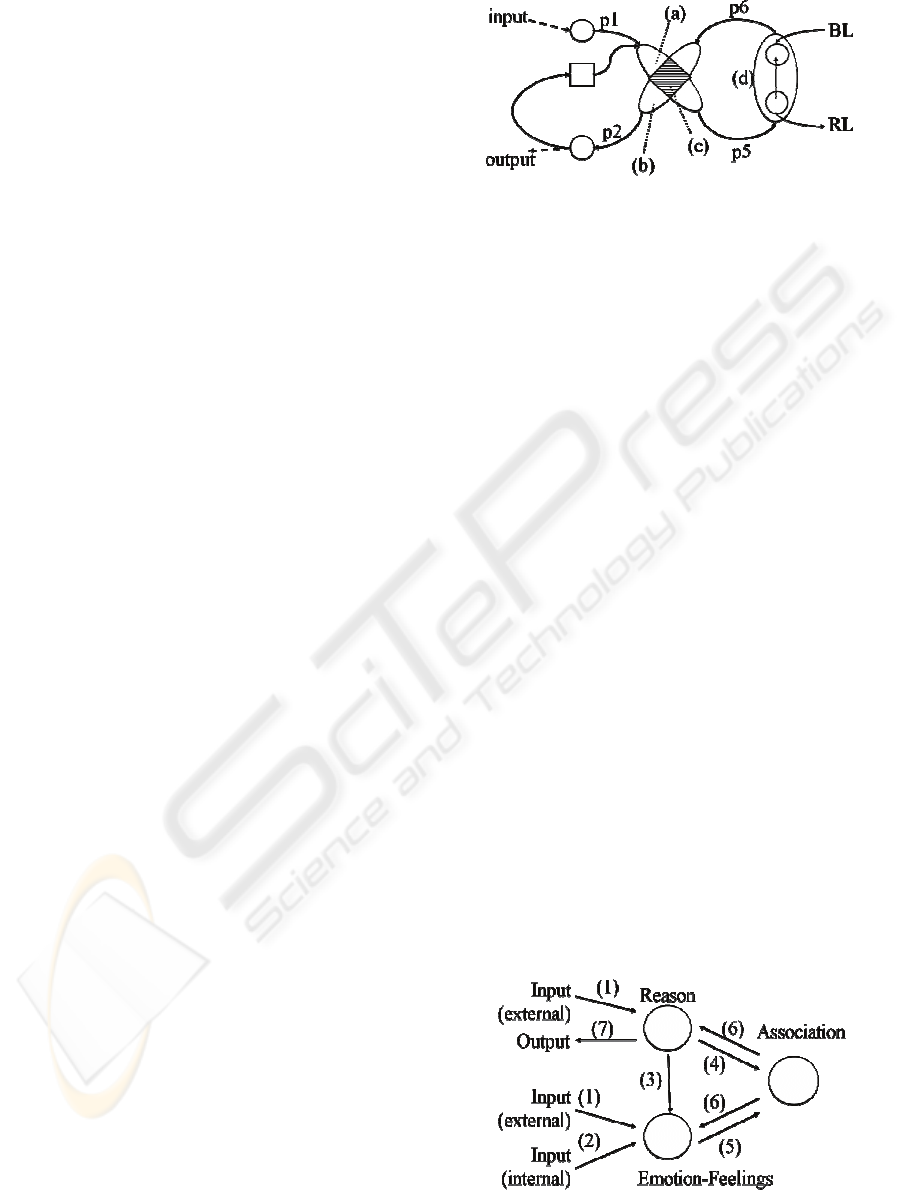
A MoNAD consists of a cognition system (a),
behavior system (b), primitive representation region
(c), symbolic representation region (d) which is a
common area shared by the cognition and behavior
systems, and input/output units (S and M) as shown
in Fig. 1.
External information (S) enters the MoNAD at
the input unit and normally goes through p1,
cognition system (a), p5 and symbolic representation
region (d). The symbolic representation region (d)
represents the state of the self and the other as
determined by the input information and language
labels RL and BL. RL is a language label for
information that is currently being cognized while
BL is the label for the behavior that is to be
performed next. RL is neuro-calculated from
information S, cognition information BL one-step
prior and behavior information M’ one-step prior.
Information of the cognition representation RL is
constantly being copied to the behavior
representation BL in the absence of any other
information input from the higher-level modules into
BL. In the symbolic representation region, the state
of the self and the other is labeled separately. At
present, all neural networks used in the study are
top-down networks, and supervised learning is used
because the main topic of this present study is the
function of human consciousness.
The behavior command from BL basically passes
through p6, behavior system (b), p2 and output unit
M. M is the information output from the MoNAD. It
is also transmitted to the lower-level MoNAD
modules. Information M is neuro-calculated from
information passing through BL and p6, input
information S and behavior information M’ one-step
prior.
One of the features of our MoNAD is that the
cognition system and behavior system share the
primitive representation region (c). Thanks to this
primitive representation region, the system learns
behaviors when cognizing and learns cognition
when behaving. The closed loop information circuit
passing through the primitive representation region
and symbolic representation region makes it possible
for the MoNAD to generate artificial inner thoughts
Figure 1: Structure of MoNAD.
and expectations in the robot. Another feature of the
MoNAD is that the state of the self is understood by
somatic sensation M’.
4 STRUCTURE OF THE
CONSCIOUS SYSTEM
The conscious system comprises three subsystems:
reason, emotion-feelings and association. All
subsystems have a similar MoNAD structure. The
reason and emotion-feelings subsystems have a
hierarchical structure formed of MoNADs. The
reason subsystem uses input information to cognize
the outer world and the state of the self, and outputs
behavior from the output unit. The emotion-feelings
subsystem employs information from the condition
of the robot’s body and represents emotions and
feelings. Two feeling MoNADs, one representing
pleasant and one unpleasant, form the top layer of
the emotion subsystem. Information from the reason
subsystem (cognized representation) is also used in
the final determination of a state of pleasant or
unpleasant.
The association subsystem uses information from
the reason and emotion-feelings subsystems and
integrates the representations of both subsystems.
The association subsystem learns, by using the result
of integration, and outputs a behavior capable of
eventually realizing pleasant for the self from the
reason subsystem.
Figure 2: A Model of the Conscious System.
A STUDY OF A CONSCIOUS ROBOT - An Attempt to Perceive the Unknown
499
5 PERCEPTION OF THE
UNKNOWN
To reproduce the situation where consistency of
cognition and behavior is lost, or when there is a gap
between the cognition and behavior, the authors
conducted color identification experiments with the
robot. The robot learns colors beforehand and
discriminates between learned and non-learned
colors. Two situations may be expected of the robot:
one is where the pre-learned colors are cognized by
the MoNADs smoothly and the other is where the
non-learned colors are not cognized smoothly.
The robot pre-learns green, red and blue colors.
In the experiment, the robot is shown black,
which is a non-learned information. We selected
black because the robot would easily identify it to be
unknown since black has no color information at all.
We intend to try other complex colors later.
Images are taken by the camera embedded in the
robot. The color is analyzed using the RGB values
of the image. One image is taken about every
second. This image-taking continues until the robot
identifies the color. The robot represents pleasant
from its feeling subsystem when it succeeds in
identifying the color. Unpleasant is represented from
the feeling subsystem when the robot fails to
identify the color.
The feelings of the robot are classified into 4
types: much unpleasant, unpleasant, pleasant, much
pleasant. Pleasant is determined when the robot
identifies the color while unpleasant is determined
when it fails.
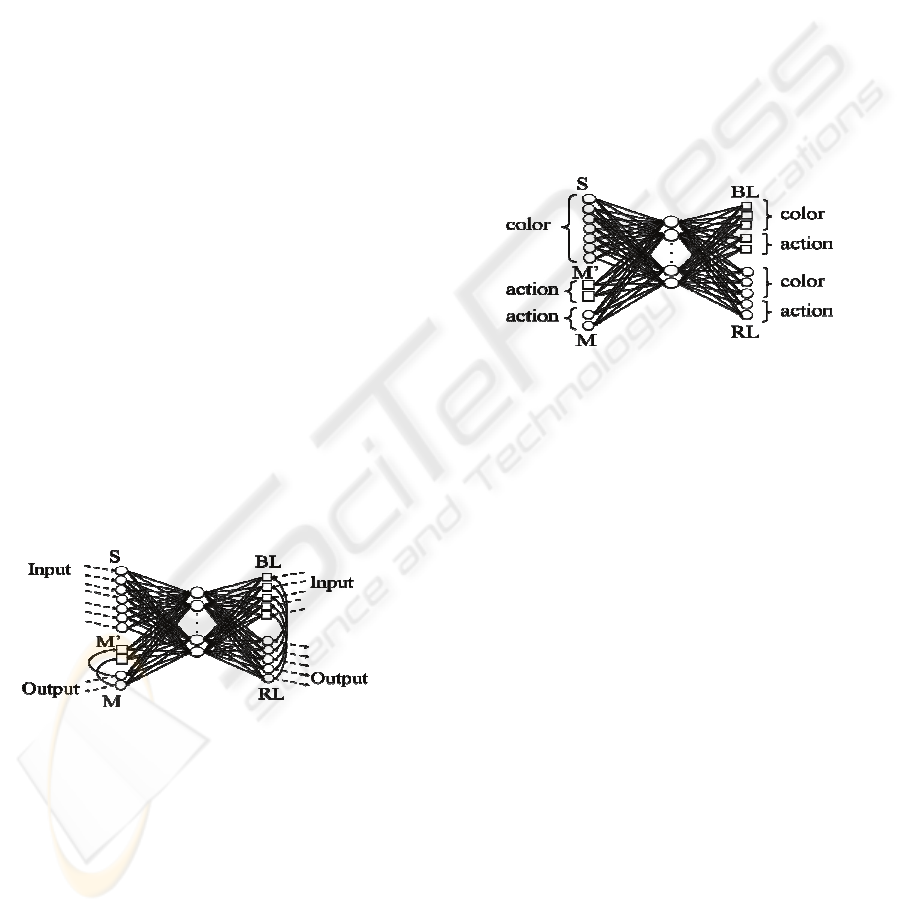
Figure 3: Development of the Conscious System with a
MoNAD Structured Neural Network.
6 DETECTION OF GAPS
BETWEEN COGNITION AND
BEHAVIOR (DIFFERENCES
BETWEEN RL AND BL)
To detect the gaps between cognition and behavior,
we calculated the gaps in bit patterns between RL
and BL (to be discussed later) in the primitive
representation region. We expected that a gap
between cognition and behavior would be present in
the primitive representation region when consistency
between cognition and behavior was lost because
information on both cognition and behavior (inputs
of external conditions, somatic sensations, and the
result of the behavior one-step prior that is used to
determine behavior) coexists in this region.
Calculating the bit pattern gap (or simply, the P-
error) involves finding the sum of the mean squared
error of the bits of RL and BL (note that each RL
and BL have a 5-bit pattern). The first 3 bits
represent the identified color and the last 2 bits are
the behavior of the self.
We determine that no gap exists between
cognition and behavior when the P-error is less than
a certain value (0.0002).
Figure 4: Description of RL and BL Nodes.
7 ROBOT EXPERIMENTS
An e-puck commercial mini-robot was used in our
experiments. We installed color LEDs on the
standard robot to be able to visualize its internal
state.
The experiment was conducted in the following
manner. First, colors are presented to the robot
which is equipped with a camera. The robot views
the color and behaves as it has learned. The robot
then responds in one of four ways: advances (upon
seeing green), stops (red), backs up (blue), or
oscillates back and forth (non-learned color).
First, we placed a color in front of the camera of
the robot to have the robot identify the color and
respond according to what it has learned. We
checked the feeling (pleasant or unpleasant) and
representation of the robot as it identified the color
successfully. Another color was then shown to the
robot to continue the experiment.
The robot advances when green is shown. Green
is a learned color and the robot cognizes it relatively
quickly. When successful, the robot feels pleasant
and the relevant LEDs light up.
The robot stops upon seeing red. Red is also a
learned color like green and the robot cognizes it
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
500
relatively quickly. When successful, the robot feels
pleasant and the relevant LEDs light up.
The result is the same when blue is shown to the
robot, and the robot backs up and feels pleasant.
When a non-learned color (black in this case) is
shown, the robot oscillates back and forth. The robot
performs many more computations than when
viewing a learned color, as it attempts to cognize the
unknown color. The robot eventually represents
unpleasant in its emotion subsystem as the number
of computations increases while it tries to identify
the unknown color. The ‘pain’ LED lights up on the
robot as it feels very unpleasant. The robot identifies
the color.
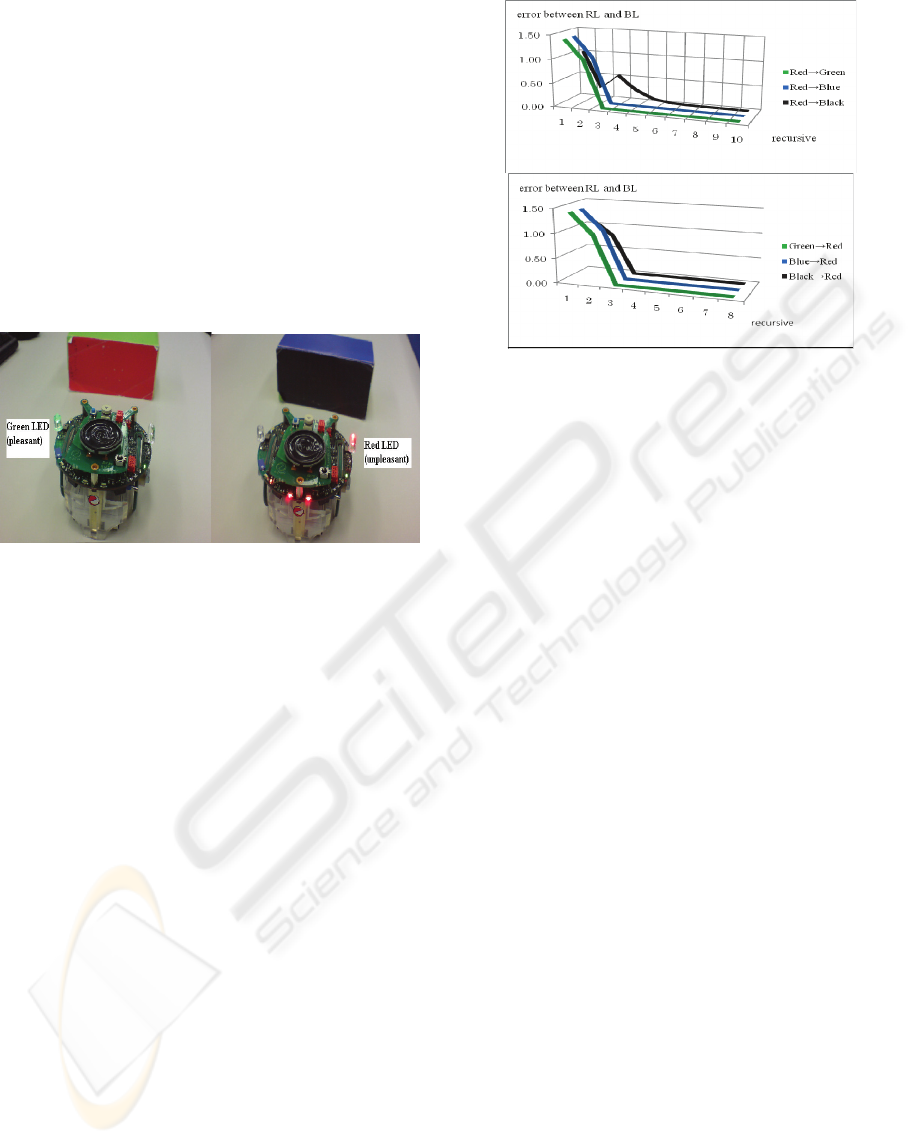
Figure 5: Views of Experiments.
8 RESULTS OF EXPERIMENTS
AND OBSERVATIONS
For the three learned colors—green, red and blue—
the consistency of cognition and behavior was
established in the robot after 3 or 4 recursive
computations with the MoNAD, and the colors were
then successfully identified. The robot showed a
pleasant state when successfully identifying colors.
When presented with non-learned information
(black), the robot required 5 to 10 recursive
computations to identify the information, and the
robot showed a very unpleasant state.
Figure 6 shows the P-error between RL and BL
when the color was changed from red to green, and
from blue to black, respectively, as well as from
green, blue and black to red.
Thanks to our embedded conscious system used
in these experiments, the robot showed, by
representing unpleasant, that it was capable of
perceiving non-learned information or a condition
that it had never experienced before.
This was our demonstration of perceiving the
unknown using a robot.
Figure 6: RL, BL and P-error.
9 SUMMARY
This paper discussed consciousness, emotions and
feelings. Based on a belief that consistency between
cognition and behavior generates consciousness, the
authors believe that pain and unpleasant, which
occur when consistency between cognition and
behavior is lost, comprise “pain of the heart.”
REFERENCES
V, S, Ramachandran., Sandra, Blakeslee., 1999. Phantoms
in the Brain: Probing the Mysteries of the Human
Mind. HARPER PERENNIAL, pp.3-328.
Suzuki, T., Inaba, K., Takeno, J., 2005. Conscious Robot
that Distinguishes between Self and Others and
implements Imitation Behavior. IEA/AIE, pp.101-110.
Igarashi, R, Suzuki, T, Shirakura, Y, Takeno, J., 2007.
Realization of an emotional robot and imitation
behavior. The 13th IASTEND International
Conference on Robotics and Applications, RA2007,
pp.135-140.
Takeno, J., 2008. A Robot Succeeds in 100% Mirror
Image Cognition. INTERNATIONAL JOURNAL ON
SMART SENSING AND INTELLIGENT SYSTEMS,
VOL. 1, NO. 4, DECEMBER 2008, pp.891-911.
Torigoe, S, Igarashi, R, Komatsu, T, Takeno, J., 2009.
Creation of a Robot that is Conscious of Its
Experiences. ICONS2009 September 21-23, 2009
Istanbul, Turkey.
A STUDY OF A CONSCIOUS ROBOT - An Attempt to Perceive the Unknown
501
