
A MAS-BASED NEGOTIATION MECHANISM TO DEAL WITH
SATURATED CONDITIONS IN DISTRIBUTED
ENVIRONMENTS
Mauricio Paletta
Centro Inv. Inf. y Tec. Comp. (CITEC), Universidad de Guayana (UNEG), Av. Atlántico, Ciudad Guayana 8050, Venezuela
Pilar Herrero
Facultad de Informática, Universidad Politécnica de Madrid (UPM), Campus de Montegancedo S/N; 28660, Madrid, Spain
Keywords: Negotiation, Distributed environment, Multi-agent system, Awareness, Artificial neural network.
Abstract: In Collaborative Distributed Environments (CDEs) based on Multi-Agent System (MAS), agents
collaborate with each other aiming to achieve a common goal. However, depending on several aspects, like
for example the number of nodes in the CDE, the environment condition could be saturated / overloaded
making it difficult for agents who are requesting the cooperation of others to carry out its tasks. To deal with
this problem, the MAS-based solution should have an appropriate negotiation mechanism between agents.
Appropriate means to be efficient in terms of the time involved in the entire process and, of course, that the
negotiation is successful. This paper focuses on this problem by presenting a negotiation mechanism
(algorithm and protocol) designed to be used in CDEs by means of multi-agent architecture and the
awareness concept. This research makes use of a heuristic strategy in order to improve the effectiveness of
agents’ communication resources and therefore improve collaboration in these environments.
1 INTRODUCTION
Collaborative Distributed Environments (CDEs) are
those in which multiple users in remote locations,
usually agents, participate in shared activities aiming
to achieve a common goal. The success of achieving
this goal in a suitable time (efficiency) and/or to
obtain the higher quality of results (effectiveness) in
these dynamic and distributed environments depends
on implementing an appropriate collaboration by
means of the most suitable mechanism. Moreover,
this appropriate collaboration mechanism should
include a negotiation technique between agents to be
used when CDE is saturated. In this paper, saturated
means that no node is available to collaborate on a
specific need for any other node in the CDE.
Negotiation techniques are used to overcome
conflicts, and to make agents come to an agreement
instead of persuading each other to accept an
established solution (Lin et al, 06). In fact, the
importance of negotiation in Multi-Agent Systems
(MASs) is likely to increase due to the growth of
fast and inexpensive standardized communication
infrastructures, which allow separately, designed
agents to interact in an open and real-time
environment and carry out transactions securely
(Wooldridge, 02).
In order to improve time of answer (efficiency),
one of the most important aspects related with
negotiation between agents is to decide with whom
to negotiate. The more fitting the candidate to
negotiate is, the faster the agent that requires
collaboration can achieve positive results of
negotiation. Therefore, the negotiation mechanism
should be endowed with an algorithm that will
decide with which node in the CDE to negotiate
with. Moreover, this algorithm must be able to make
a decision based on the current situation and making
use of the experience acquired from previous
negotiations. Heuristic techniques are a good
alternative to achieve this goal.
By using Vector Quantization (VQ) techniques
(Kohonen et al, 84), (Makhoul et al, 85), (Nasrabadi
et al, 88-1), (Nasrabadi et al, 88-2), (Naylor et al,
88), this paper presents a novel negotiation
159
Paletta M. and Herrero P. (2010).
A MAS-BASED NEGOTIATION MECHANISM TO DEAL WITH SATURATED CONDITIONS IN DISTRIBUTED ENVIRONMENTS.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Agents, pages 159-164
DOI: 10.5220/0002708201590164
Copyright
c
SciTePress

mechanism for CDEs endowed with a non-
supervised Artificial Neural Network (ANN) to
decide the most suitable candidate with whom to
negotiate. This strategy, based on a Neural-Gas
network (NGAS) (Martinetz et al, 91), takes into
account the information of awareness collaborations
occurring in the environment under saturated
conditions for achieving the most appropriate future
awareness situations.
The remainder of this paper is organized as
follows. Some background aspects are showed in
section 2. Section 3 describes the complete MAS-
based negotiation mechanism proposed in this paper.
Results of the evaluation of the method are showed
in Section 4. Some related work is given in Section
5. Finally, the last section includes the conclusions
and outgoing future research related to this work.
2 BACKGROUND
This Section presents some background related with:
1) vector quantization and neural-Gas network; and
2) the collaborative mechanism where the
negotiation process presented in this paper is used.
2.1 Vector quantization and NGAS
Vector Quantization (VQ) is the process of
quantizing n-dimensional input vectors to a limited
set of n-dimensional output vectors referred to as
code-vectors. The set of possible code-vectors is
called the codebook. The codebook is usually
generated by clustering a given set of training
vectors (called training set). Clustering can be
described then, as the process of organizing the
codebook into groups whose members share similar
features in some way.
Neural-Gas (NGAS) is a VQ technique with soft
competition between the units. In each training step,
the squared Euclidean distances between a randomly
selected input vector x
i
from the training set and all
code-vectors m
k
are computed; the vector of these
distances, expressed in (1) is d. Each centre k is
assigned a rank r
k
(d) = 0, …, N-1, where a rank of 0
indicates the closest distant centre to x. The learning
rule is expressed as it is indicated in (2).
)(*)(
ki
T
kikiik
mxmxmxd −−=−=
(1)
)(*)]([*
kkkk
mxdrhmm
−
+=
ρ
ε
(2)
)/(
)(
ρ
ρ
r
erh
−
=
(3)
A monotonically decreasing function of the
ranking that adapts all the centers, with a factor
exponentially decreasing with their rank is
represented in (3). The width of this influence is
determined by the neighborhood range
ρ
. The
learning rule is also affected by a global learning
rate
ε
. The values of
ρ
and
ε
decrease exponentially
from an initial positive value (
ρ
(0),
ε
(0)) to a smaller
final positive value (
ρ
(T),
ε
(T)) according to
expressions (4) and (5) respectively, where t is the
time step and T the total number of training steps,
forcing more local changes with time.
)/(
)]0(/)([*)0()(
Tt
Tt
ρρρρ
=
(4)
)/(
)]0(/)([*)0()(
Tt
Tt
εεεε
=
(5)
2.2 The Collaborative Process
The collaborative process used for this research
(Paletta et al, 08), (Paletta et al, 09-1), (Paletta et al,
09-2) is based on the concept of awareness of
interaction. It has a CDE (E) containing a set of n
nodes N
i
(1 ≤ i ≤ n) and r items or resources R
j
(1 ≤ j
≤ r). These resources can be shared as a
collaborative mechanism among different nodes. It
has:
1) N
i
.Focus(R
j
): It can be interpreted as the
subset of the space (environment/ medium) on which
the agent in N
i
has focused his attention aiming for
collaboration with, according to the resource R
j
.
2) N
i
.NimbusState(R
j
): Indicates the current
grade of collaboration that N
i
can give over R
j
. It
could have three possible values: Null, Medium or
Maximum. If the current grade of collaboration N
i
that is given about R
j
is not high, and this node could
collaborate more over this resource, then
N
i
.NimbusState(R
j
) will get the Maximum value.
N
i
.NimbusState(R
j
) would be Null if there is not
more collaboration possible with N
i
related with R
j
.
3) N
i
.NimbusSpace(R
j
): It Represents the
subset of the space where N
i
aims to establish the
collaboration about R
j
.
4) R
j
.AwareInt(N
a
, N
b
): This concept
quantifies the degree of collaboration over R
j
between a pair of nodes N
a
and N
b
. It is manipulated
via Focus and Nimbus, requiring a negotiation
process. Following the awareness classification
introduced by Greenhalgh (Greenhalgh, 97), values
of this concept could be Full, Peripheral or Null.
5) N
i
.TaskResolution(R
1
,…,R
p
): N
i
requires
collaboration with all R
j
(1 ≤ j ≤ p).
6) N
i
.CollaborativeScore(R
j
): Determines the
score to collaborate R
j
in N
i
. It is represented with a
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
160

value within [0, 1]. The closer the value is to 0 the
hardest it will be for N
i
to collaborate with the
necessity of R
j
.
Any node N
a
in the CDE is represented by an
agent that has the corresponding information about E
(Focus and Nimbus for R
j
). The collaborative
process in the CDE follows these steps:
1) N
b
must solve a task by means of a
collaborative task-solving process making use of the
resources R
1
,…,R
p
, so that, it generates a
N
b
.TaskResolution(R
1
,…,R
p
).
2) N
b
looks for the CDE current conditions to
calculate the values associated to the key concepts of
the model (Focus/Nimbus related to the other
nodes), given by N
i
.Focus(R
j
) and N
i
.Nimbus(R
j
) ∀i,
1 ≤ i ≤ n and ∀j, 1 ≤ j ≤ r.
3) Nodes in CDE respond to request for
information made by N
b
. This is done through the
exchange of messages between agents.
4) As a final result of the previous
information exchange the model will calculate the
current awareness levels given by R
j
.AwareInt(N
i
,
N
b
).
5) N
b
gets the collaboration score
N
b
.CollaborativeScore(R
j
).
6) For each resource R
j
(1 ≤ j ≤ p) included in
N
b
.TaskResolution(R
1
,…,R
p
), N
b
selects the node N
a
whose N
a
.CollaborativeScore(R
j
) is the most
suitable to start the collaborative process (greatest
score). Then, N
a
will be the node in which N
b
should
collaborate on resource R
j
.
7) Once N
a
receives a request for
cooperation, it updates its Nimbus (given by
N
a
.NimbusState(R
j
) and N
a
.NimbusSpace(R
j
)).
8) Once N
a
has finished collaborating with N
b
it must update its Nimbus.
However, when conditions on the CDE are not
appropriated enough to establish a collaboration
process (N
i
.NimbusState(R
j
) = Null for most of the
N
i
, R
j
) the conditions for collaboration are saturated.
Therefore, if the node N
b
initiates a collaborative
process and find no more options to collaborate with
and related to any R
j
, then N
b
could start a
negotiation process that allows it to have new
candidates to collaborate with and related to this
specific R
j
. Next section presents the details of this
negotiation mechanism.
3 THE MAS-BASED
NEGOTIATION MECHANISM
The negotiation mechanism proposed in this paper
consists of three elements: 1) a heuristic algorithm
for deciding the most suitable node to initiate
negotiation based on current conditions; 2) a
protocol for exchanging messages between agents;
3) a heuristic method to accept/decline a need for
collaboration during a negotiation.
3.1 Deciding the Node to Negotiate
For deciding the most suitable node to negotiate
with, the idea is to define a non-supervised learning
strategy aiming to correlate the current information
of the nodes in the distributive environment based
on clusters. Most suitable node means a candidate
that accepts the requirements necessary to
collaborate with it.
To achieve the previous goal a NGAS-based
algorithm is used. Therefore, the decision consists
on identifying the node that is closest to the hyper-
plane defined by the space given by the current
environment conditions. In other words, it is
necessary to determine the winning unit as a result
of testing the NGAS with the environment.
Input vector is defined as follows (being N
b
the
node who requires collaboration on a set of
resources and therefore who sends the
N
b
.TaskResolution(R
1
,…,R
p
), for each N
a
≠ N
b
):
1) The N
a
.NimbusState(R
j
) that will be
represented by a value Nst within the interval [0,1]
being Nst = 1 the value associated to N
a
.Nimbus
State(R
j
) = Maximum, Nst = 0.5 the value associated
to N
a
.NimbusState(R
j
) = Medium, and Nst = 0 the
value associated to N
a
.NimbusState(R
j
) = Null.
2) The R
j
.AwareInt(N
a
, N
b
) that will be
represented by a value AwI within the interval [0,1]
being AwI = 1 the value associated to R
j
.Aware
Int(N
a
, N
b
) = Full, AwI = 0.5 the value associated to
R
j
.AwareInt(N
a
, N
b
) = Peripheral, and AwI = 0 the
value associated to R
j
.AwareInt(N
a
, N
b
) = Null.
Therefore, the code-vectors for this problem
have 2n elements, being n the number of nodes in
the CDE. If N
a
= N
b
then Nst = AwI = 0.
3.2 The Negotiation Protocol
Agents in the CDE exchange the following three
messages (see Fig. 1 for this protocol):
1) REQUEST: Once N
b
has indentified a node
N
a
to negotiate with, N
b
uses this message to
communicate its need to N
a
so that N
a
will accept to
collaborate with N
b
in relation to the resource R
j
.
2) CONFIRM: In response to a REQUEST
message, N
a
uses this message to inform N
b
that it
has accepted the request for collaboration.
A MAS-BASED NEGOTIATION MECHANISM TO DEAL WITH SATURATED CONDITIONS IN DISTRIBUTED
ENVIRONMENTS
161
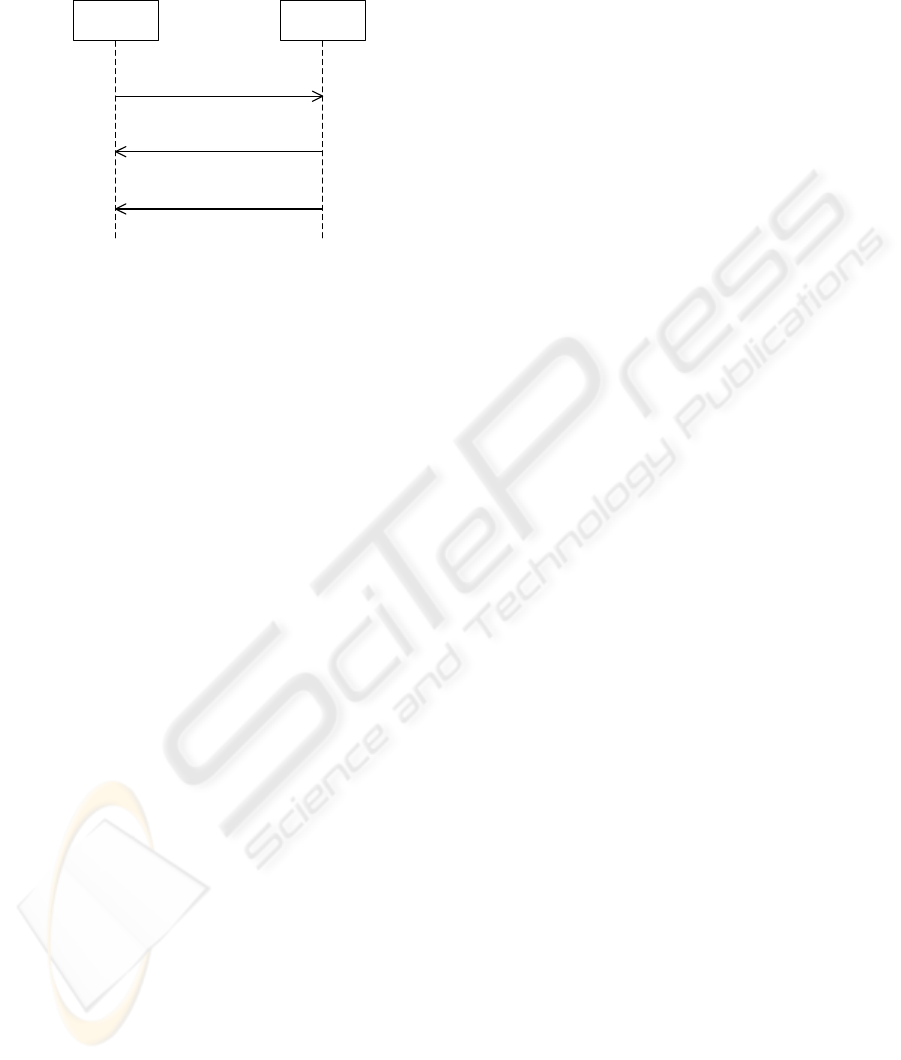
3) DISCONFIRM: In response to a
REQUEST, N
a
informs N
b
that it has not accepted
the request for collaboration.
Nb Na
CONFIRM
REQUEST
(R
j
)
DISCONFIRM
A positive response
is received
A negative response
is received
Request for
negotiation
from N
b
Figure 1: The inter-agent negotiation protocol.
Note that the ultimate goal of negotiation is to
make a node accept a proposal to change its current
condition provided by its Nimbus. On the other
hand, in case of a negative response, N
b
can decide
between looking for another candidate to negotiate
with and declining to seek collaboration in relation
to the particular resource R
j
.
3.3 Accept/Decline Collaboration
As with the decision of the most suitable node to
negotiate with, this is also an ANN-based strategy.
In this case there are r supervised ANN, one for each
resource R
j
defined in the environment. All ANNs
are defined in the same way. There are three inputs
and one output. The output s ∈ [0, 1] represents the
decision i.e. it is accepted if s ≥ 0.5, and declined
otherwise. Inputs are as follows:
1) A value PhyAsp(R
j
) ∈ [0, 1] that indicates
the level of physical availability of the resource R
j
;
PhyAsp(R
j
) = 1 means that the resource is
completely available, PhyAsp(R
j
) = 0 means that the
resource is fully saturated.
2) A value equal to 1 if N
b
∈ N
a
.Focus(R
j
),
being N
b
the node that is requiring for the decision,
and N
a
the node that should make the decision. If N
b
∉ N
a
.Focus(R
j
) then entry is 0.
3) A value equal to Nco
NR
/ TNco(R, N),
being Nco
NR
the number of times N (node that is
requiring for the decision) has collaborated with the
current node (node that should make the decision)
related to R. Therefore, Nco is a nxr matrix that
should be updated by each node in the environment.
The idea is to reward those nodes N
b
that
collaborated in the past with N
a
and are just now
requiring collaboration of N
a
. TNco(R, N) is
calculated by using (6).
⎪
⎩
⎪
⎨
⎧
≠
=
∑∑
==
otherwise ),1,(random
0 ,
),(
11
NR
r
j
Nj
r
j
Nj
Nco
NcoNco
NRTNco
(6)
The ANNs used in this strategy are Multi-Layer
Perceptrons (MLPs) based models. There is only one
hidden layer with two units.
4 EVALUATION
A MAS used for CDEs has been created to evaluate
the negotiation mechanism presented in this paper.
Agents called IA-Awareness were defined by using
the architecture SOFIA (SOA-based Framework for
Intelligent Agents) (Paletta et al, 09-2), (Paletta et al,
09-3). This MAS-based platform has been
implemented in JADE (Bellifemine et al, 99).
The evaluation of the mechanism was conducted
in a TCP/IP-based LAN (Local Area Network)
which assumes that each node (PC) can directly
communicate with any other node. The
experimentation was conducted by simulating
different scenarios aiming to rate the capability of
the method used for managing the growth of the
nodes in the different environment conditions. The
scenarios were defined by changing the quantity of
nodes/PCs n (agents) as well as the number of
resources r according to n ∈ {4, 8} and r ∈ {2, 6,
10}. Therefore 6 different scenarios were simulated:
1) n = 4, r = 2; 2) n = 4, r = 6; 3) n = 4, r = 10; 4) n
= 8, r = 2; 5) n = 8, r = 6; and 6) n = 8, r = 10.
Moreover:
1) The initial condition of the CDE for each
scenario (N
i
.Focus(R
j
), N
i
.NimbusState(R
j
) and
N
i
.Nimbus Space(R
j
); 1 ≤ i ≤ n; 1 ≤ j ≤ r) was
randomly defined by considering the following: one
node belongs to the Focus of another node with a
probability of 0.75 and to the Nimbus with a
probability of 0.85.
2) All N
b
nodes execute an automatic process
that generates N
b
.TaskResolution(R
1
,…,R
p
) by
randomly selecting the involved resources from the
50% of the total resources in the scenario.
3) PhyAsp(R
j
), ∀j 1 ≤ j ≤ r were randomly
initialized.
4) The parameters used for configuring the
NGAS-based ANNs are the following:
ε
(0) = 1.58;
ε
(T) = 0.02;
ρ
(0) = 5.59;
ρ
(T) = 0.07.
Aiming to measure the effectiveness (θ) and
efficiency (ξ) of the negotiation mechanism,
expressions, (7) and (8) were defined respectively
(note that both measures (θ, ξ) are positive values in
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
162
[0, 1] where 1 is the maximum effectiveness and
efficiency). Where:
- PSN is the percentage of successful negotia-
tions made in saturated conditions based on the
number of negotiations that receive a positive
response in relation to the total attempts.
- MDN is the mean duration in seconds of the
negotiation process under saturated conditions. The
process starts at the moment the node requires the
cooperation until it receives an answer, whether
affirmative or negative.
- ATC is the average time of collaboration in
seconds calculated since TaskResolution(R
1
,…,R
p
)
starts until it ends.
100/θ PSN=
(7)
ATCMDN /1ξ −=
(8)
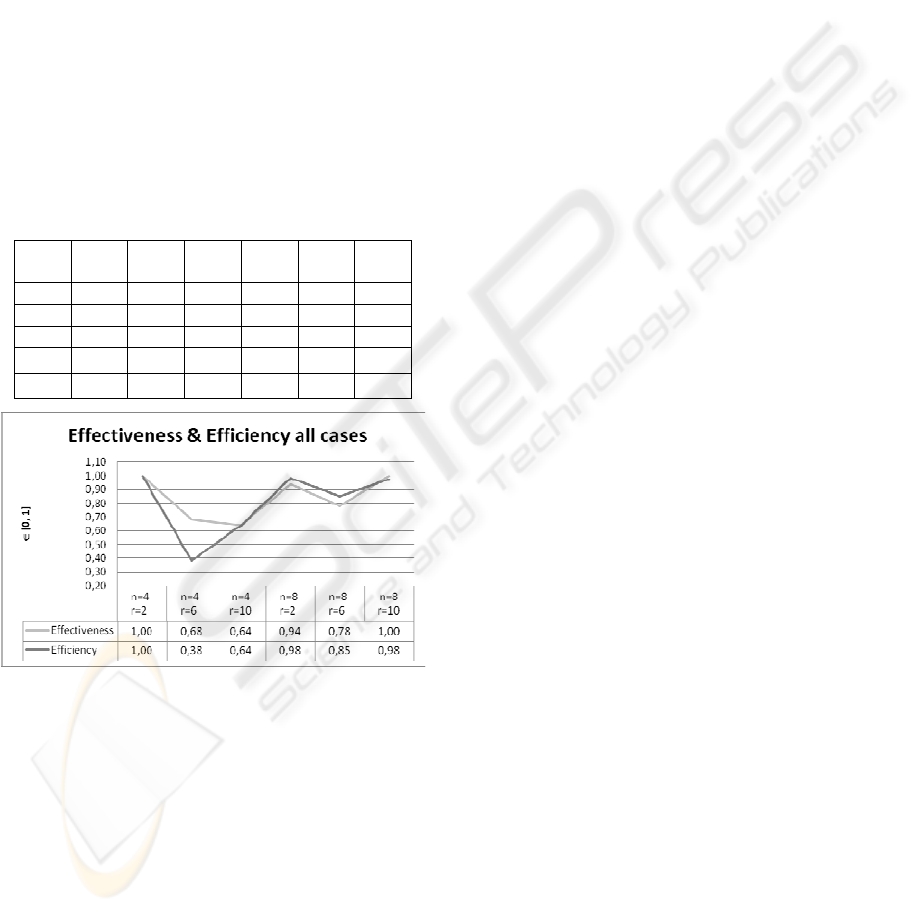
Table 1: Measures obtained from simulation of each
scenario.
Mea-
sure
n = 4
r = 2
n = 4
r = 6
n = 4
r = 10
n = 8
r = 2
n = 8
r = 6
n = 8
r = 10
PSN 100,00 68,13 64,29 93,75 78,13 100,00
MDN 0,00 2,14 1,23 0,13 2,16 0,44
ATC 3,40 3,46 3,34 7,47 14,87 19,28
θ
1,00 0,68 0,64 0,94 0,78 1,00
ξ
1,00 0,38 0,64 0,98 0,85 0,98
Figure 2: Results obtained from simulations.
Table 1 shows the measures obtained after a
simulation of 120 minutes for each scenario, and
Figure 2 shows the effectiveness and efficiency
related with these measures. According to these
results it is possible to make the following
observations and/or conclusions:
1) The average effectiveness is 0,84 and the
average efficiency is 0,81.
2) Both effectiveness and efficiency have a
similar trend of behavior.
3) Nor the variation in the number of nodes or
the variations in the number of resources have a
particular tendency to improve or worsen the
effectiveness and efficiency.
It is important to stress that, due to the fact that it
is a learning-based mechanism from past situations,
it is assumed that as there is much more to learn, the
metrics associated with it must be improved.
5 RELATED WORK
Regarding the context of awareness and recognizing
the current context of a user or device, authors in
(Mayrhofer et al, 07) present an approach based on
general and heuristic extensions to the growing
NGAS algorithm classifier which allow its direct
application for context recognition.
The use of ANN technology for negotiation
algorithms can be found in (Oprea, 02), (Roussaki et
al, 07), (Zeng et al, 05), (Sakas et al, 07). Author in
(Oprea, 02) presents an adaptive negotiation model
that uses a feed-forward artificial neural network as
a learning capability to model the other agent
negotiation strategy. In (Roussaki et al, 07), authors
proposed a MLP-based learning strategy that is used
mainly to detect at an early stage the cases where
agreements are not achievable, supporting the
decision of the agents to withdraw or not from the
specific negotiation thread.
In the same order of ideas, authors in (Zeng et al,
05) propose an agent-based learning method in
automated negotiation based on ANN aiming to
implement interactions between agents and
guarantee the profits of the participants for
reciprocity. Finally, authors in (Sakas et al, 07)
overcome the difficulty of using fuzzy logic and
fuzzy neural networks by applying an adaptive
neural topology to model the negotiation process.
Although the use of ANN for negotiation
mechanisms can be found in several previous works,
as far as we know, there is no similar approach
related with the subject of this paper: a non-
supervised based model for learning cooperation on
CDE by using the awareness concept.
6 CONCLUSIONS AND FUTURE
WORK
This paper presents a new negotiation mechanism
used for a MAS-based system that is a part of
Collaborative Distributed Environments (CDEs).
The method proposed is endowed with two heuristic
algorithms and an exchange message protocol
A MAS-BASED NEGOTIATION MECHANISM TO DEAL WITH SATURATED CONDITIONS IN DISTRIBUTED
ENVIRONMENTS
163

between agents. The heuristic algorithms are used
primarily for deciding the most suitable node to
collaborate with, and secondly, for the agent that
receives a request for negotiation to decide whether
or not to choose if it wants/can to collaborate.
Results show that the mechanism has an average
effectiveness of 0,84 and an average efficiency of
0,81. Therefore, this mechanism ensures an
agreement in negotiation in a short period of time.
Although this method has not yet been tested in a
real CDE, it has been designed to be suitable for real
environments. In fact the validation carried out to
presently demonstrate that this method could be
extended to real scenarios in CDE with no problems.
We are currently working on testing this method
in real CDE as well as using this strategy in grid and
cloud computing environments.
REFERENCES
Andre, D., Koza, J., 1996. A parallel implementation of
genetic programming that achieves super-linear
performance. In Proc. International Conference on
Parallel and Distributed Processing Techniques and
Applications, pp. 1163-1174.
Arenas, M.I., Collet, P., Eiben, A.E., Jelasity, M., Merelo,
J.J., Paechter, B., Preuss, M., Schoenauer M., 2002. A
Framework for Distributed Evolutionary Algorithms.
In Proc. 7th International Conference on Parallel
Problem Solving from Nature (PPSN VII). LNCS
2439, pp. 665-675.
Bellifemine, F., Poggi, A. Rimassa, G., 1999. JADE – A
FIPA-compliant agent framework. Telecom Italia
internal technical report. In Proc. International
Conference on Practical Applications of Agents and
Multi-Agent Systems (PAAM'99), pp. 97-108.
Blanchard, E., Frasson, C., 2002. Designing a Multi-agent
Architecture based on Clustering for Collaborative
Learning Sessions. In Proc. International Conference
in Intelligent Tutoring Systems, LNCS. Springer.
Greenhalgh C., 1997. Large Scale Collaborative Virtual
Environments. Doctoral Thesis, University of
Nottingham.
Ferber, J., 1995. Les systems multi-agents, Vers une
intelligence collective. Ed. InterEditions, pp. 1-66.
Kohonen, T., Mäkisara, K., Saramäki, T., 1984.
Phonotopic maps – insightful representation of
phonological features for speech recognition. In Proc.
7th International Conference on Pattern Recognition,
pp. 182-185.
Lin, F., Lin, Y., 2006. Integrating multi-agent negotiation
to resolve constraints in fulfilling supply chain orders
Electronic Commerce Research and Applications, Vol.
5, No. 4, pp. 313-322.
Makhoul, J., Roucos, S., Gish, H., 1985. Vector
quantization in speech coding. In Proc. IEEE 73, IEEE
Computer Society, pp. 1551-1588.
Martinetz, T.M., Schulten, K.J., 1991. A neural-gas
network learns topologies. In T. Kohonen et al (eds).,
Artificial Neural Networks, pp. 397-402.
Mayrhofer, R., Radi, H., 2007. Extending the Growing
Neural Gas Classifier for Context Recognition.
Computer Aided Systems Theory – EUROCAST 2007,
pp. 920-927.
Nasrabadi, N.M., Feng, Y., 1988. Vector quantization of
images based upon the Kohonen self-organizing
feature maps. In IEEE International Conference on
Neural Networks, pp. 1101-1108.
Nasrabadi, N.M., King, R.A., 1988. Image coding using
vector quantization: A review. IEEE Trans Comm
36(8), IEEE Computer Society, pp. 957-971.
Naylor, J., Li, K.P., 1988. Analysis of a Neural Network
Algorithm for vector quantization of speech
parameters. In Proc. First Annual INNS Meeting, NY,
Pergamon Press, pp. 310-315.
Oprea, M., 2002. An Adaptive Negotiation Model for
Agent-Based Electronic Commerce. Studies in
Informatics and Control, Vol. 11 i3, pp. 271-279.
Paletta, M., Herrero, P., 2008. Learning Cooperation in
Collaborative Grid Environments to Improve Cover
Load Balancing Delivery. In Proc. IEEE/WIC/ACM
Joint Conferences on Web Intelligence and Intelligent
Agent Technology, pp. 399-402.
Paletta, M., Herrero P., 2009. Awareness-based Learning
Model to Improve Cooperation in Collaborative
Distributed Environments. In Proc. 3rd International
KES Symposium on Agents and Multi-agents Systems
– Technologies and Applications (KES-AMSTA 2009),
LNAI 5559, Springer, pp. 793-802.
Paletta, M., Herrero P., 2009. Foreseeing Cooperation
Behaviors in Collaborative Grid Environments. In
Proc. 7th International Conference on Practical
Applications of Agents and Multi-Agent Systems
(PAAMS’09), Vol. 50/2009, Springer, pp 120-129.
Paletta M., Herrero P., 2009. Towards Fraud Detection
Support using Grid Technology, Special Issue at
Multiagent and Grid Systems - An International
Journal, Vol. 5, No. 3, IOS Press, pp. 311-324.
Roussaki, I., Papaioannou, I. Anangostou, M., 2007.
Building Automated Negotiation Strategies Enhanced
by MLP and GR Neural Networks for Opponent
Agent Behaviour Prognosis. Computational and
Ambient Intelligence, V. 4507, Springer, pp. 152-161.
Sakas, D.P., Vlachos, D.S., Simos, T.E., 2007. Adaptive
Neural Networks for Automatic Negotiation. In Proc.
of the International Conference on Computational
Methods in Science and Engineering (ICCMSE 2007),
Vol. 2, Parts A and B, AIP Conference Proceedings,
pp. 1355-1358.
Wooldridge., M.J., 2002. An Introduction to Multiagent
Systems, John Wiley and Sons.
Zeng, Z.M., Meng, B., Zeng, Y.Y., 2005. An Adaptive
Learning Method in Automated Negotiation Based on
Artificial Neural Network. In Proc. of 2005
International Conference on Machine Learning and
Cybernetics, Vol. 1, Issue 18-21, pp. 383-387.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
164
