
A 3D INDOOR PEDESTRIAN SIMULATOR
USING A SPATIAL DBMS
Hyeyoung Kim and Chulmin Jun
Department of Geoinformatics, University of Seoul, Seoul, Korea
Keywords: 3D data model, Spatial DBMS, Pedestrian simulation, CA.
Abstract: Most crowd simulation models for pedestrian dynamics are based on analytical approach using experimental
settings without being related to real world data. In order for the models to be adapted to real world
applications such as fire evacuation or warning systems, some technical aspects first must be resolved. First,
the base data should represent the 3D indoor model which contains semantic information of each space.
Second, in order to communicate with the indoor localization sensors to capture the real time pedestrians
and to store the simulation results for later uses, the data should be in a DBMS instead of files. The purpose
of this paper is two folds. One is to suggest a DBMS-based 3D modeling approach for pedestrian
simulations. The other is to improve the existing floor field based pedestrian model by modifying the
dynamic field. We illustrated the data construction processes and simulations using the proposed DBMS
approach and the enhanced pedestrian model.
1 INTRODUCTION
Many micro-scale pedestrian simulation models
have been proposed for the last decade and applied
to fire evacuation problems or building safety
evaluation. Recent development in localization
sensors such as RFID draws our attention to indoor
spaces and real-time applications. In order for our
pedestrian models to be applied to real world indoor
applications, they need to use different data formats
other than current experimental file formats. The
data should include semantic and topological
information of building 3D spaces. Also, to be able
to communicate with the location sensors to capture
the real pedestrian movement, the data should be
stored in a DBMS. Once data are stored in a
database, the simulation results can also be stored
back in the DB for real time evacuation guidance.
In this paper we proposed a method to build a
simplified 3D model which is suitable for pedestrian
simulation. Instead of representing the complex
details of indoor spaces, we used the floor surfaces
focusing on the fact that pedestrian movements take
place only on the surfaces. We showed the process
to build the 3D model using a spatial DBMS.
We also developed a pedestrian simulator and
tested using our proposed 3D model. In the model,
we used the floor field model as our base model and
revised the dynamic field strategy.
2 RELATED WORKS
3D models currently used in the 3D GIS are actually
2.5 dimensional CAD-based data types focusing on
visualization purpose in realistic way. They have
limitations for analytical purposes in indoor space
applications due to its lack of topological and
semantic structure. As a solution to this, topological
models along with using DBMSs for 3D objects
have been recently investigated by some researchers
(Arens 2003, Stoter et al. 2002, 2003, Zlatanova
2000). 3D models suggested by those are generally
categorized as follows:
A. SOLID – FACE – EDGE – NODE
B. SOLID – FACE – NODE
C. SOLID – FACE
The three types are data models for defining 3D
volumes not for interior spaces. CAD-based models
have been used widely and there is a growing
interest in using IFC (Industry Foundation Classes)
format especially for modeling and developing
building information systems. Although these
14
Kim H. and Jun C. (2010).
A 3D INDOOR PEDESTRIAN SIMULATOR USING A SPATIAL DBMS.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Agents, pages 14-21
DOI: 10.5220/0002715200140021
Copyright
c
SciTePress
formats offer flexibility in modeling indoor spaces
with various data primitives, they are file-based
formats and, thus, have limitations in being used in
indoor information systems as mentioned earlier. On
the other hand, CityGML which was adopted as a
standard by OGC (Open Geospatial Consortium) is a
3D model that provides different levels of details
ranging from region to interior spaces (Kolbe 2008,
Stadler et al. 2007). CityGML is based on XML
format for the storage of data and has capability of
storing complex semantic information. However, it
has not provided fully functional data base
implementation. One of the reasons is attributed to
the fact that current commercial DBMSs do not fully
support topological structure of 3D objects yet.
Evacuation models have been studied in various
fields such as network flow problems, traffic
assignment problems, and are generally categorized
into two; macroscopic and microscopic models
(Hamacher et al. 2001).
Macroscopic models appear in network flow or
traffic assignment problems and take optimization
approach using node-link-based graphs as the data
format. They consider pedestrians as a homogeneous
group to be assigned to nodes or links for
movements and do not take into account the
individual interactions during the movement. On the
other hand, microscopic models emphasize
individual evacuees’ movement and their responses
to other evacuees and physical environment such as
walls and obstacles. Microscopic models are mainly
based on simulation and use fine-grained grid cells
as the base format for simulation. They have been
used by experts in different domains including
architectural design for the analytical purposes of the
structural implications on the human movement
especially in emergency situations.
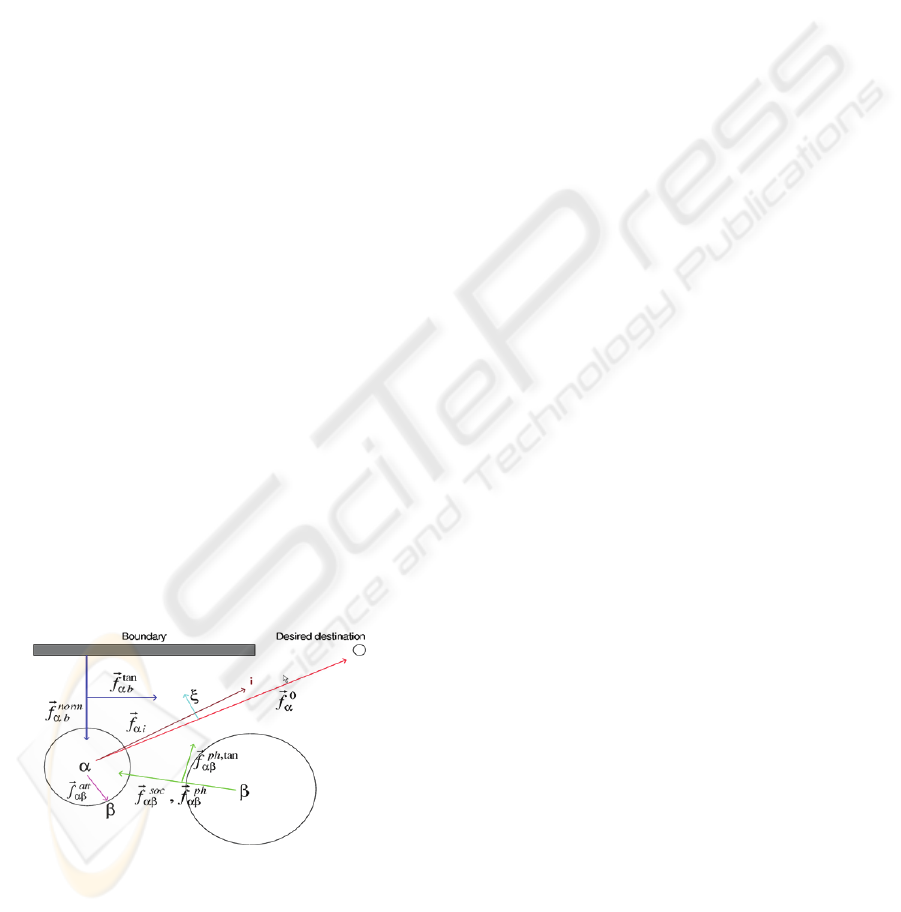
Figure 1: Helbing’s social force model.
Different micro-simulation models have been
proposed over the last decades (Schadschneider
2001) but two approaches are getting attention;
social force model and floor field model (Kirchner et
al. 2002). A frequently cited model of former type is
advanced by Helbing and collegues (Helbing et al.
1997, 2001) and is based on strong mathematical
calculation acted on agents to determine its
movement to destination (e.g. exits). Helbing’s
model considers the effects of each agent upon all
other agents and physical environment (Figure 1)
leading to the computation of O(n
2
) complexity,
which is unfavorable for computer-based simulation
with many agents (Henein et al. 2005, 2007).
In recent years there is a growing interest to use
cellular automata as the base of micro-simulation
(Blue et al. 1999, Klupfel et al. 2002). Kirchner and
colleagues (Kirchner et al. 2002) have proposed CA-
based floor field model, where two kinds of fields—
static and dynamic—are introduced to translate
Helbing’s long-ranged interaction of agents into a
local interaction. Although this model considers only
local interactions, they showed that the resulting
global phenomena share properties from the social
force model such as lane formation, oscillations at
bottlenecks, and fast-is-slower effects. The floor
field model uses grid cells as the data structure and
computes movement of an agent at each time step
choosing the next destination among adjacent cells.
This makes computer simulation more effective.
In this paper we focus on Kirchner’s model as
our base model. We will later describe the limitation
of his dynamic field computation strategy and how
we revised it.
3 A SIMPLIFIED INDOOR 3D
MODEL
In our previous study (Park et al. 2007) we had
proposed a 2D-3D hybrid data model that can be
used both in 2D-based semantic queries and 3D
visualization. We used two separate models, 2D GIS
layers and 3D models, and combined them using a
database table as the linkage method.
Although the previous file-based approach was
satisfactory in incorporating semantic and
topological functionality into a 3D model, it has
some drawbacks. First, two models are created
separately and need additional table for linkage,
which makes consistent maintenance difficult.
Second, building a 3D model by separating
compartments requires additional time and cost.
Finally, such file-based models are not easy to store
many buildings and, most importantly, they cannot
be integrated with client/server applications such as
sensor systems (i.e. RFID, UWB, thermal sensors).
A 3D INDOOR PEDESTRIAN SIMULATOR USING A SPATIAL DBMS
15

To solve these problems, we proposed in this
research a new approach that uses a DBMS instead
of files. Because semantic information is now
extracted from database tables and used for analyses
and 2D/3D visualization, the new model does not
require an additional table for linkage. This data
model has a multi-layered structure based on 2D
building floor plans as the previous file-based
model. It retains 2D topology because building floor
plans are converted into 2D GIS layers (shapefiles)
and then are stored in a spatial database. Thus, it is
possible to perform topology-based analyses and
operations provided by the DBMS. Also, all records
containing geometries can be visualized for 2D and
3D.
Indoor location-based application use locations
and tracing information of pedestrians who move on
the surface floors in the building. This means that it
is possible to retrieve semantic data and perform
analytical operations only using floor surfaces in
such applications (i.e. indoor crowd simulation,
indoor wayfinding). This is the reason that we
choose to use building floor plans as the base data
type. For the connection of floors, we also converted
the stairs to a simple set of connected polygons and
then stored in the DBMS. Figure 2 illustrates the
process for storing indoor objects in a database. This
shows that we used only the bottom part of a room
polyhedron.
Figure 2: An example of storing rooms floors in a spatial
DB.
This approach can well fit in DBMS-based
applications due to less complex and simplified data
construction process. Using a DBMS against file
format gives many merits including data sharing,
management, security, back-up and speed. It is also
possible to integrate with sensor systems by storing
the sensor information in the database. In this study,
we used PostgreSQL/PostGIS for the DBMS.
PostgreSQL is an open source object-relational
database system, freely downloadable. To display
indoor objects in 3D stored in the database, we used
OpenGL library and it also interacts with the
PostGIS database for the data retrieval and
visualization (Figure 3).
Figure 3: 3D visualization using data from a spatial
DBMS.
4 FLOOR FIELD MODEL
We chose Kirchner model as our base model. His
original model (Kircher et al. 2002) and some
variations (Nishinari et al. 2005) have demonstrated
the ability to capture different pedestrian behaviors
discussed in the previous section while being
computationally efficient. First, we will describe the
basic features of the floor field model and, then,
describe how we improved the model.
4.1 Two Fields in Floor Field Model
Floor field model is basically a multi-agent
simulation model. Here, each pedestrian is an agent
who interacts with environments and other
pedestrians. The group of such agents forms a multi-
agent system (MAS). The agents in MAS have some
important characteristics as follows (Wooldridge
2002).
Autonomy: Agents are at least partially
autonomous. An agent reacts to environment
and other agents with autonomous manner.
Local View: No agent has a full global view
of the system. Each agent has no guidance to
exits, instead, it moves only by local rules.
Decentralization: Each agent in the system is
equal and no agent controls others.
These characteristics of MAS in pedestrian
models are frequently implemented using cellular
automata (CA) and Kirchner model is also based on
CA. CA theories are introduced in many related
works, thus we will not introduce them here.
The basic data structure of Kirchner model is
grid cells and each cell represents the position of an
agent and contains two types of numeric values
which the agent consults to move. These values are
stored in two layers; static field and dynamic field.
A cell in the static field indicates the shortest
distance to an exit. An agent is in position to know
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
16
the direction to the nearest exit by these values of its
nearby cells.
While the static field has fixed values computed
by the physical distance, the dynamic field stores
dynamically changing values indicating agents’
virtual traces left as they move along their paths. As
an ant use its pheromone for mating (Bonabeau
1999), the dynamic field is similarly modeled where
an agent diffuses its influence and gradually
diminishes it as it moves. Without having direct
knowledge of where other agents are, it can follow
other nearby agents by consulting dynamic values.
It is possible to simulate different pedestrian
strategies by varying the degree to which an agent is
sensitive to static or dynamic field. For example, we
can model herding behaviors in panic situation by
increasing sensitivity to the dynamic field. Such
sensitivity factors are described in the following
section.
4.2 Floor Field Rule
An agent in the floor field model consults the scores
of its adjacent cells to move. A score represent the
desirability or the attraction of the cell and the score
of cell i is computed by the following formula (Colin
2005):
Score(i) = exp(k
d
D
i
) × exp(k
s
S
i
) × ξ
i
× η
i
(1)
where, D
i
: the dynamic field value in cell i
S
i
: the static field value in cell i
k
d
, k
s
: scaling parameters governing the
degree to which an agent is sensitive to
dynamic field or static field respectively
ξ
i
: 0 for forbidden cells (e.g. walls,
obstacles) and 1 otherwise
η
i
: Occupancy of agent in the cell. 0 if an
agent is on the cell, and 1 otherwise.
Kirchner and his colleagues used probability
P(i), the normalized value of score(i) against all nine
adjacent cells including itself. However, it turns out
that using score(i) and p(i) has same effect since
they are always proportional to each other in the
adjacent nine cells.
The static field is first computed using a shortest
distance algorithm such as the famous Dijkstra’s
algorithm. Then, all agents decide on their desired
cells and they all move simultaneously. We
converted Kirchner’s rule to a pseudocode. The
following pseudocode represents the movement of
an agent.
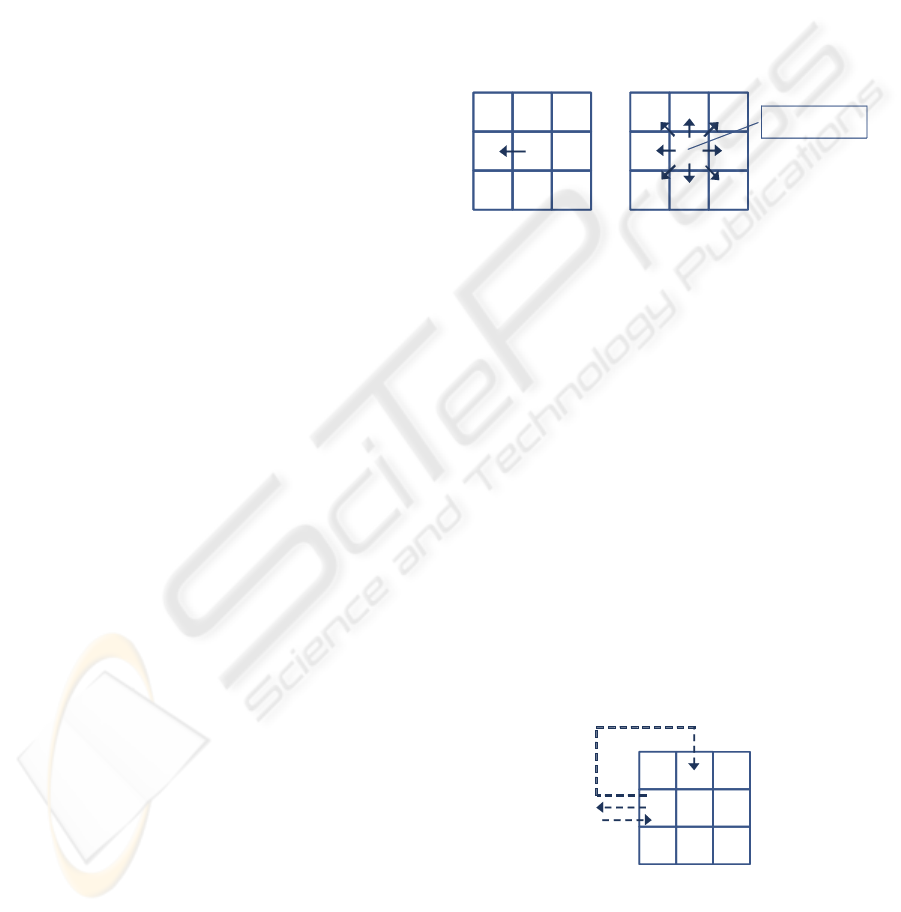
After an agent has moved to one of its adjacent
cells except its own, the dynamic value at the origin
is increased by one: D
i
Æ
D
i
+ 1 (Burstedde 2001,
Nishinari 2005). Then a portion( α ) of D
i
is
distributed equally to the adjacent cells (diffuse) and
a portion(β) of D
i
itself becomes diminished. α and
β is the input parameters to the model. This diffuse
and decay process follows the analogy of ant
pheromones which are left for a while and decayed
gradually. Agents consult dynamic and static values
at the same time. The scaling factors(k
d
and k
s
) are
used to control the degree to which an agent react
more to one of two fields. The ratio k
d
/k
s
may be
interpreted as the degree of panic. The bigger the
ratio, the more an agent tend to follow others.
● ●
D
i
Æ D
i
+ 1
Figure 4: Diffuse and decay of the dynamic value.
5 REVISED DYNAMIC FIELD
The dynamic field is believed to be an effective
translation of the long-ranged interaction of
Helbing’s model (Helbing et al. 1997, 2001) to local
interaction. However, Kirchner model do not
differentiate an agent’s dynamic value with ones of
others. The model simply adds the diffused and
decayed values to the existing values.
It is reasonable that we consider that an agent
should be able to avoid its own influence as an ant
uses its pheromone. Kirchner’s dynamic field does
not cause a significant problem when an agent
moves to one direction. However, as shown in figure
5, there may be cases when an agent comes back to
its own trace area. Then, the agent has no choice but
to get influenced by its own dynamic value if not
much.
●
Figure 5: A problem of using the dynamic value when
returning to the own dynamic area.
We modified the Kirchner’s dynamic field such
that an agent can exclude its own dynamic value
when computing equation (1). To make it possible,
A 3D INDOOR PEDESTRIAN SIMULATOR USING A SPATIAL DBMS
17

the model should have a data structure that allows
each cell to store a list of dynamic values of agents
that have chance to leave their values to that cell. If
we put the dynamic value of agent p as d(p, k), then
a set D(k) having a list of dynamic values can be
given by
D(k) = {d(p, k) : p=1, 2, …, n}
Here, n is the number of agents that have the
dynamic values that are greater than zero. We might
easily presume that maintaining such set makes the
model O(n
2
) complexity which are computationally
unfavorable. However, D(k) does not contain the
entire agents’ values and, instead, keep only those
agents’ values that pass k’s nearby areas and keep
non zero dynamic values. Thus, each cell keeps
relatively small number of entries compared to the
whole number of agents. For the implementation of
the simulator, we used .NET C# language, and the
data structure called Dictionary. The dictionary
keeps a list of (key, value) pairs, where the key
represent an agent while the value is its dynamic
value.
If an agent p happens to leave any portion of its
dynamic value to cell k more than once, d(p, k)
maintains only the maximum value among them.
This makes sense if we imagine that the decaying
scent get again maximized when an ant returns to
that area.
d(p, k) = max{d(p, k): p=1, 2, …, m}
Here, m is the number that an agent p leaves any
portion of its dynamic values to cell k. Eventually,
when consulting the score(i), agent q at cell i is able
to exclude its own dynamic values in the adjacent
cells and only takes the maximum one from each
D(k) into account.
D(k)
q
= max{d(p, k): p ≠ q}
●
D(k) = {d(p , k) : p = 1, 2, …, n}
● ●
d
max
d
max
d
max
d
max
●
d
max
d
max
d
max
d
max
d(p ,r) = d (p,r) ? 1
where r is an
adjacent cell of i-1
if ¬ d(p, k) ∈D(k) t hen
D(k) = D(k )∪d(p , k)
where
k is an adjacent cell of i,
d(p, k) = d
max
i i-1
(a) (b) (c)
Figure 6: The list of dynamic values at cell k(a), an agent’s
movement, and diffusion and decay(c).
We also modified the diffusion and decay
strategy in our model. As shown in Figure 6, right
after an agent p moves, d(p, k) values of the adjacent
cells of cell i-1 is decreased by one, and then d(p, k)s
of the adjacent cells of the current cell i are newly
assigned the maximum dynamic value. Then, what is
the maximum dynamic value? Let us first take an
example before describing it.
Figure 7. shows a building floor plan that has a
main exit and a room inside with a door. We assume
Agent A and B are located as in the figure. The
numbers on the cells indicated the static field values
computed from the main exit.
In Kirchner’s model, the dynamic values are
assigned regardless of the static values of the current
location. In a simple rectangular space as those used
by the author, such strategy may not cause much
problem since the static values lead the agents to the
exit eventually even though the dynamic values are
much greater than its static counterparts at the
current location.
However, in using real building plans where
multiple rooms are located inside, such strategy can
cause a problem. If static values are gradually
assigned from main exit(s), inner rooms can have
very low values depending on the size of the
building. Let’s suppose Agent B reaches the room
door. If there are multiple agents in the room and
they happen to leave bigger dynamic values in the
back of agent B than the static values in that area,
then the agent can get stuck in the door because one
or more empty adjacent cells in the back may be
bigger than that of forward cells.
8.5 7.5
9 8
6.5 5.5 4.5
7 6 5
2.5 1.5
3 2
9.5 8.5
11 10 ●
9.5 8.5
7.5 6.5 5.5
8 7 6
7.5 6.5 5.5
3.5 2.5
5 4 ●
3.5 2.5
9 8
8.5 7.5
7 6 5
6.5 5.5 4.5
3 2
2.5 1.5
0.5 0
1 0
1.5 0.5
2 1
1.5 9.5
1 0
0.5 0
Agent BAgent AMain Exit Room Door
RoomHall
Figure 7: The problem of initializing the dynamic values
in a building having multiple compartments.
To solve this problem, we changed the diffuse
and decay strategy by letting an agent choose the
maximum value of the adjacent static values as its
initial dynamic value. This way, any agent inside the
space can have the initial dynamic value which is
proportional to the corresponding static values. The
static and dynamic values are of different units; one
is distance and the other is an abstract interpretation
for attraction force. In order for a model to control
the sensitivity to these two field values, two values
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
18
should be comparable to each other at any cell. That
is the reason we synchronizes the initial dynamic
values with the static values every time an agent
moves. Following is a pseudocode with the modified
dynamic value computation.
i = b // Set i to the beginning node
O=
Φ
// Set the open list to empty set
D
(k)=
Φ
for k
∈
N // Set the Dynamic list for each node to empty set
P
(i) = null // Set the parent node of node i to null
s(i) = 0 // Set the score of the node i to 0
O = (i) // Add the node i to the open list
While (i
≠
E) // Iterate while node-i is not the destination node
{
// Choose the maximum score node among the open list.
Let i
∈
O be a node for which
s(i) = max{ s(i) : i
∈
O } and s(i) > 0
// If the agent- i has moved to a node other than itself
if( i
≠
P(i) )
{
// For each node in the open list, if the node contains
// the agent p
’
s dynamic value, decrease it by one
for each k
∈
O
if d(p, k)
∈
D(k) then d(p,k) = d(p,k) - 1
O=
Φ
// Reset the open list to empty set
// For each of searchable adjacent nodes of i
// (i.e. excluding those obstacles as walls and furniture and
// including i and) set parent, and add to the open list
// j: Adjacent nodes of i including i itself
for each ( i, j )
∈
A(i)
{
// If not in the open list, add j to it
if j
∉
O then O = O
∪
(j)
// Set the parent node of j to i
P(j) = i
}
// Get the maximum static value among those
// in the open list nodes (t(k): static value in cell k)
d
max
= max{ t(k) : k
∈
O }
// For each node in the open list, if the dynamic list does
// not contain the dynamic value of node k, add it to D(k)
for each k
∈
O
{
d(p, k) = d
max
if d(p, k)
∉
D(k) then D(k) = D(k)
∪
d(p, k)
}
}
}
Figure 8: Pseudocode for an agent movement.
6 SIMULATION
6.1 3D Data Model Construction
For the simulation, we constructed a 3D model of a
real campus building following the proposed
approach described in the previous section. The
building has two main exits; the one in the front is
wider than the side exit. We first simplified the CAD
floor plans for the test purpose and they were
converted to shapefiles, then stored into the PostGIS.
The stairs were simplified and decomposed into
several connected polygons and also stored in the
DBMS. Once all data are stored, all connected floor
surfaces now can be retrieved simply by SQL
queries. Finally, the queried surface data were then
converted to grid cell data for simulation. We set the
cell size to 40cm × 40cm considering the human
physical size.
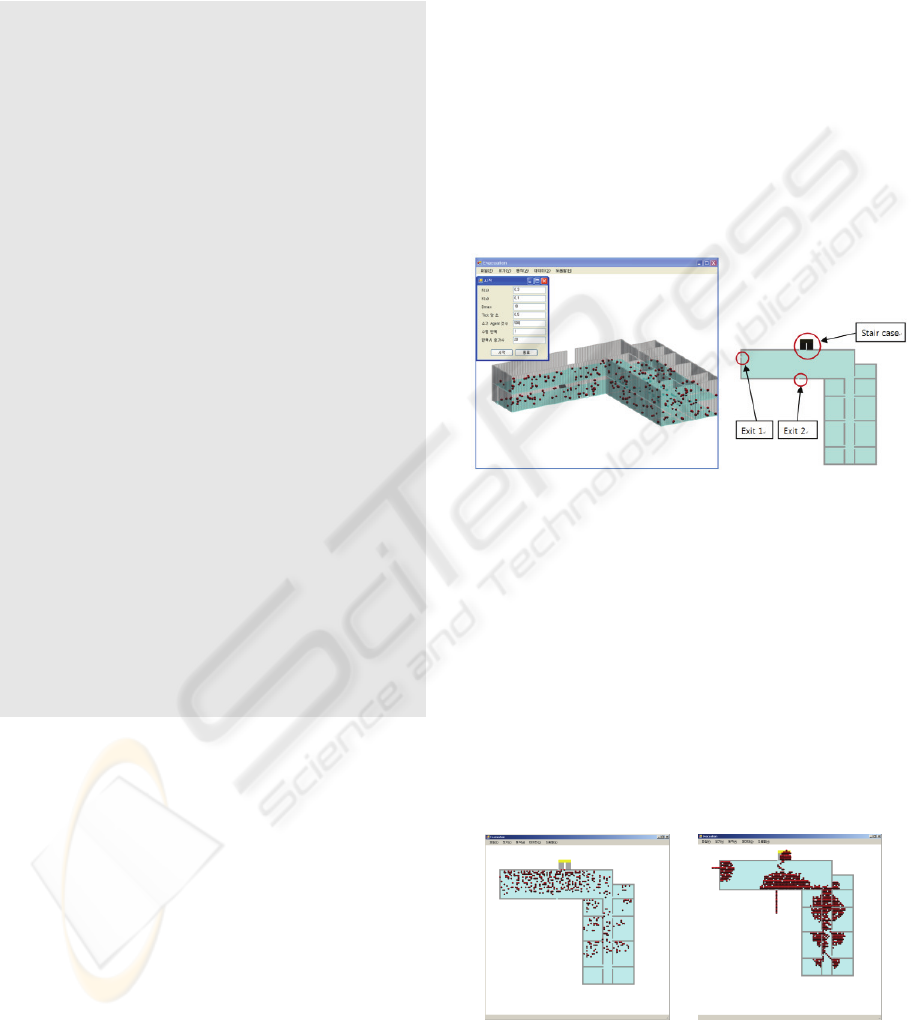
We developed a simulator using the C# language
and the OpenGL library. Figure 9 shows the
interface of the simulator and the 3D model used in
the simulation. The simulator reads in the data from
the PostGIS or the cellularized surface data. Once
the data are read in, they can be visualized in 2D or
3D in OpenGL-based display module. In the
simulator, we can input parameters such as k
s
, k
d
,
d
max
, time step, the number of agents, the number of
iterations and the increments of the agents number in
the iterations.
Figure 9: The pedestrian simulator and the 3D model used
in the test.
6.2 Results
The simulator first constructs the static field
computing the shortest distance from the two main
exits to each cell in the building. We used varying
numbers for the parameters. Figure 10 shows the
two extreme cases; k
s
= 0 and k
d
= 0. As can be
easily guessed, k
s
= 0 makes the agents wander
around the space herding towards nearby agents
without any clue of direction to exits. On the other
hand, K
d
= 0 causes the agents flow directly towards
exits without any herding behaviors.
(a) (b)
Figure 10: Snapshot of two extreme cases; k
s
= 0(a) and k
d
= 0(b).
A 3D INDOOR PEDESTRIAN SIMULATOR USING A SPATIAL DBMS
19

Figure 10 shows the effect of varying k
d
values.
While k
d
= 0 correctly leads the agents to exits
where the agents are belonged to based on their
static values, k
d
> 0 begins to show the herding
behaviors. When a few agents happen to leave the
group, others begin to follow them, leading to
increasing the use of the side exit.
(a) (b)
Figure 11: The effect of varying k
d
; k
d
= 0(a) and k
d
/k
s
=
0.5.
We further investigated the effect of the dynamic
term k
d
using varying values. Table 1 shows the
effect of K
d
on the evacuation time and the use rate
of the side exit (Exit 1). 2000 agents were used for
the test. We observed that the use rate of the side
exit gets increased in proportion to k
d
. However,
using k
d
>0 slightly decreased the total number exited
and then didn’t change it significantly thereafter.
This was because Exit 2, the main exit, is wider
around twice as much as Exit 1. This indicates that
using wider second exit can help decreasing the
number exited.
Table 1: The effect of Varying K
d
on evacuation time
and use of the side exit.
k
d
=0 k
d
=0.05 k
d
=0.1 k
d
=0.25 k
d
=0.5 k
d
=1.0
Exit1 120 351 422 484 566 689
Exit2 1880 1649 1578 1516 1434 1311
evactime 945 723 702 688 670 632
Another experiment was carried out to measure
the time escaped with increasing agents and varying
k
d
/k
s
. The results are provided in Figure 12 showing
the number of outgoing agents and the time taken
with 6 sets of k
d
/k
s
. The (k
d
, k
s
) value pairs in the
test were (0, 0.3), (1, 0.1), (0.25, 0.5), (0.1, 0.1),
(0.05, 0.1), and (0.1, 1). The number of agents used
were 500~5000. We observed that k
d
= 0 made the
curve almost linear increase while using different k
d
s
that are greater than 0 did not cause significant
differences. However, the result shows leading
people to alternative exit definitely decrease the
overall escape time.
Figure 12: Time take for escape of varying number of
agents with different sets of k
d
/k
s
.
7 CONCLUDING REMARKS
In this study, we suggested a process to develop a
3D evacuation simulator instead of trying to improve
the scientific investigation of crowd behaviors. In
order to be able to integrate our system with real-
time evacuation or rescuers’ guidance, we suggested
a less complex 3D indoor model focusing on the
semantic information and navigation taking place on
the floor surface. We also implemented the proposed
model using a SDBMS and 3D visualization.
We also suggested a modified floor field
pedestrian model using Kirchner’s model. His model
has demonstrated the ability to represent different
pedestrian situations while maintaining basic
MAS(multi-agent system) rules of autonomy and
localization. However, his model is unable to
capture the differences in dynamic values of
different agents.
We have improved the floor field model in order
for an agent to be able to exclude the influences of
its own dynamic values by changing the data
structure of dynamic field, which better conforms
the analogy of ant pheromones. Also, by turning his
constantly increasing and decreasing dynamic term
D into dynamically changing term around agent’s
nearby static values, our model has shown the
flexibility to more complex indoor configurations.
We currently keep improving the model by
incorporating visibility effects and multiple
velocities. Also, we focus on relating our model to
real world applications. In this paper, we briefly
introduced the use of spatial DBMS and 3D
structures. However, with some refinements, we
believe that our model can be adapted to real world
3D indoor applications equipped with indoor
localization sensors. Then, we will be able to use the
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
20

real distribution of indoor pedestrians captured by
sensors instead of using randomly generated agents.
ACKNOWLEDGEMENTS
This research was supported by a grant (
07KLSGC04 ) from Cutting-edge Urban
Development - Korean Land Spatialization Research
Project funded by Ministry of Land, Transport and
Maritime Affairs.
REFERENCES
Arens, C.A., 2003. Maintaining reality: modelling 3D
spatial objects in a GeoDBMS using a 3D primitive.
M.Sc. Thesis, Delft University of Technology, The
Netherlands.
Blue, V. J. and Adler, J. L., 1999. Using cellular automata
microsimulation to model pedestrian movements, In
A. Ceder (Ed.), Proceedings of the 14th International
Symposium on Transportation and Traffic Theory,
Jerusalem, Israel, pp. 235-254.
Bonabeau, E., Dorigo, M., and Theraulaz, G., 1999.
Swarm intelligence: From natural to artificial systems.
Oxford University Press, New York.
Burstedde, C., Klauck, K., Schadschneider, A., and
Zittartz, J., 2001. Simulation of pedestrian dynamics
using a two-dimensional cellular automaton. Physica
A 295, pp. 507–525.
Colin, M., and White, T., 2005. Agent-Based Modelling of
Force in Crowds, MABS 2004, LNAI, 3415, pp. 173-
184.
Hamacher, H. W., and Tjandra, S. A., 2001. Mathematical
modelling of evacuation problems- a state of art. In M.
Schreckenberg and S. Sharma, (Eds.), Pedestrian and
Evacuation Dynamics, Springer-Verlag, Berlin, pp.
227-266.
Helbing, D., Farkas, I., Molnár , P., and Vicsek, T., 2001.
Simulation of pedestrian crowds in normal and
evacuation situations. In M. Schreckenberg and S.
Sharma, (Eds.), Pedestrian and Evacuation Dynamics,
Springer-Verlag, Berlin, pp. 21-58.
Helbing, D., and Molnár, P., 1997. Self-organization
phenomena in pedestrian crowds, In F. Schweitzer
(ed.), Self-Organisation of Complex Structures: From
Individual to Collective Dynamics, Gordon & Beach,
London, UK.
Kirchner, A., and Schadschneider, A., 2002. Simulation of
evacuation processes using a bionics-inspired cellular
automaton model for pedestrian dynamics. Physica A
312, pp. 260-276.
Klupfel, H., Konig, T., and Wahle, J., and Schreckenberg,
M., 2002 Microscopic simulation of evacuation
processes on passenger ships, In Proceedings of
Fourth International Conference on Cellular
Automata for Research and Industry, Oct. 4-6,
Karlsruhe, Germany.
Kolbe, T.H., 2008. Representing and exchanging 3D city
models with CityGML, In J. Lee and S. Zlatanova,
(eds.), 3D Geo-information Sciences, Springer-Verlag,
Berlin, pp. 15-31.
Nishinari, K., Kirchner, A., Namazi, A, and
Schadschneider, A., 2005. Simulations of evacuation
by an extended floor field CA model, In Traffic and
Granular Flow ’03, Spinger-Verlag, Berlin, pp. 405-
410.
Park, I., Kim, H., and Jun, C., 2007. 2D-3D hybrid data
modeling for fire evacuation simulation. ESRI
International User Conference 2007, San Diego.
Schadschneider, A., 2001, Cellular automaton approach to
pedestrian dynamics - Theory. In M. Schreckenberg
and S. Sharma, (Eds.), Pedestrian and Evacuation
Dynamics, Springer-Verlag, Berlin, pp. 75-86.
Stadler, A., and Kolbe, T.H., 2007. Spatio-semantic
coherence in the integration of 3D city models, In
Proceedings of 5th International ISPRS Symposium on
Spatial Data Quality ISSDQ 2007 in Enschede.
Stoter, J.E., and van Oosterom, P.J.M., 2002.
Incorporating 3D geo-objects into a 2D geo-DBMS,
ACSM-ASPRS 2002.
Stoter, J.E. and Zlatanova, S., 2003. Visualising and
editing of 3D objects organised in a DBMS.
Proceedings EUROSDR Workshop : Rendering and
Visualisation, pp. 14-29.
Wooldridge, M., 2002. An Introduction to MultiAgent
Systems, John Wiley & Sons.
Zlatanova, S., 2000. 3D GIS for urban development, PhD
thesis, Institute for Computer Graphics and Vision,
Graz University of Technology, Austria, ITC, the
Netherlands.
A 3D INDOOR PEDESTRIAN SIMULATOR USING A SPATIAL DBMS
21
