
MULTIAGENT SYSTEM FOR THE PREVENTION OF
ACCIDENTS OF PEOPLE LIVING ALONE
Miguel A. Sanz-Bobi, David Contreras, J. García de Diego, Alberto Pérez and Jose J. de Vicente
Computer Science Department, Engineering School, Pontificia Comillas University, Alberto Aguilera 23, Madrid, Spain
Keywords: Multi-agent system, Assistive system, Prevention of risks, Elderly people, Disabled people, Intelligent
system.
Abstract: This paper describes a multiagent system designed for assisting elderly and disabled people living alone in
their homes. The main objective of this system is to prevent risky situations by monitoring key variables of
daily life. This system is conceived as pro-active advancing warnings issued to the user, but also, if
necessary, to the caretaker and the corresponding assistance services. This multi-agent system has been
designed to be easily extended and adapted to different user requirements. The agents have different roles
related to the acquisition of information, the processing of it and communication to the different human
agents.
1 INTRODUCTION
At present an important demographic change is
taking place regarding the mean age of our society.
The increase of the population aged 60 years or
older is very significant. This is a world wide
phenomenon as observed by the United Nations
(United Nations, 2007).
Also, there is an increasing sensibility in society
and a desire from different public Administrations to
improve the quality of life of elderly people and, in
general, of disabled people. For example, when
elderly people are healthy, but with typical problems
due to ageing, the best recommendation is that they
spend as much time as possible enjoying their life
within their family and social environment, without
the need to abandon their home, but under a social
program providing continuous care from them.
Important research projects have been completed
and are in progresses that try to assist people living
alone but with some kind of dependence, using the
important tools that the new information
technologies can offer for remote monitoring and
assistance.
In order to try to solve this problem, several
organizations and companies offer teleassistance.
The most part of this type of services are based on
the demand of the user by simply pushing a button
on a small device that he/she carries on him/her
(Aguilera, 2003). A specialized call centre attends
any request from the user 24 hours a day, and also,
the call centre can contact the user periodically in
order to know that everything is going well. All
these services are very helpful, but they require
inputs based on human decisions taken by the user
or people attending the call centre. It seems that a
further step is needed in order to try to monitor some
daily activities of such elderly or disabled people.
Important advances have been made in the use of
new information technologies for monitoring some
activities of elderly people at home (Jih, 2006),
(Giansanti, 2006), (
Marschollek, 2007), (Reyna,
2005) for assistance to find the way, if one is
disoriented (Liu, 2006) and to monitor some
important biological parameters (Pollack, 2005).
Also, some technological platforms have been
developed which are able to integrate different kinds
of services for remote assistance to elderly people
(Robocare, 2009). In this field and direction this
paper describes new features added to an intelligent
multi-agent system named SIAM previously
published by the authors (Pascual, 2008).
This paper is organised in the following sections:
first in section 2 the objectives of the system and
main strategy are presented, next in section 3 the
architecture is presented and the rest of the sections
are centred on presenting new features added to
SIAM. Section 4 presents the method for fall
detection used by SIAM, and Section 5 describes a
special agent for real time vision. Finally, section 6
299
A. Sanz-Bobi M., Contreras D., García de Diego J., Pérez A. and J. de Vicente J. (2010).
MULTIAGENT SYSTEM FOR THE PREVENTION OF ACCIDENTS OF PEOPLE LIVING ALONE.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Agents, pages 299-304
DOI: 10.5220/0002718502990304
Copyright
c
SciTePress

describes a method of communication based on the
use of the television (TV) controller.
2 SIAM OBJECTIVES
The main objective of SIAM is to monitor key
activities of elderly people living alone at home in
order to prevent some situations that could be
dangerous in their daily activities. In the case that an
abnormal situation is detected, SIAM takes the
decision to call the caretaker and/or the
corresponding assistance services. The main features
of SIAM are the following:
• continuous monitoring of certain variables that
could be important for risk detection in daily
activities at home. Examples of possible risk
situations are: a sudden fall of the person on to
the dining room floor, unattended gas open in the
kitchen, unattended water running in the bath,
etc.
• facilitating reminders to complete specific tasks
• easy communication with the user and also with
the external world using several alternative
methods.
• if necessary, automatically calling the caretaker
and/or emergency services, for example
contacting the caretaker, the family, and/or the
CMD (Central Monitoring Department).
• remote vision of a scenery and communication
with the user at home only when an exceptional
alarm is issued
The working context expected by SIAM contains
the following four types of actors: the user or elderly
person, the CMD, the caretaker and SIAM itself.
This is represented in Figure 1.
Figure 1: SIAM actors and relationships among them.
Usually, SIAM collects information from sensors
installed in the home of the elderly person in order
to detect if a possible risky situation is caused by an
action or event when the person is at home carrying
out his/her activities. In the case that some anomaly
or risk is detected, SIAM will first try to contact the
elderly person and, if an answer is not received, this
will be notified to the CMD and/or to the caretaker.
Also, from Figure 1, it is possible to observe that the
user can activate a request to the CMD and to the
caretaker and vice verse.
3 SIAM ARCHITECTURE
SIAM is a multiagent system developed in JAVA
and JADE (JADE, 2009). It has been elaborated
using a typical methodology of development
(Bresciani, 2004). It contains the following types of
agents:
• USER. This is the method of communication
between SIAM and the person at home in both
directions. This agent can be installed in two
alternative modes either in a mobile device that
the person carries on him/her, such as a PDA, or
using the TV remote control when a digital
television transmission is available.
• DATA COLLECTOR. This agent is in charge of
the collection of information from sensors
located at key locations in the house. They are
used for monitoring certain activities that can be
or can cause certain risks for the person. These
agents are located in the house being monitored.
• HOME CONTROLLER. This agent collaborates
with the other agents and performs a pre-analysis
of the situation in order to obtain a global view
of the activities in the house and to detect
possible anomalies or risk situations. This agent
is located in the house being monitored.
• DIAGNOSTIC. This agent performs the
diagnosis of possible risks in the house of the
elderly person according to the information
collected and specialized knowledge previously
stored in the knowledge base of an expert
system. This agent is located in the CMD
responsible for taking care of a group of elderly
people using the SIAM platform.
• CARETAKER. Its objective is taking care of all
the communications from SIAM to the caretaker
and vice verse. This agent is located in a mobile
device that the caretaker carries on him or her.
At the moment this agent is installed in a PDA.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
300
• VIEWER. Its objective is to facilitate a real time
image of the person when special circumstances
are detected that suggest that there is an
emergency situation. This agent is based on a
low cost robot.
Figure 2 shows the multi-agent architecture. As
can be observed, the diagnostic agent is physically
located at the CMD. The CMD is conceived as a
specialized centre that could be a nursing home or in
general a company dedicated to taking care of
elderly people. The CMD can monitor several
houses, each one having its own diagnostic agent.
USER
DC 1
DC 2
DC n
HC
DIAGNOSTIC
CARETAKER
CMD
Caretaker
Elderlyperson’shome1
Elderly person’s home 2
Elderly person’s home n
DC Data Collector
HC Home Controller
Figure 2: SIAM architecture of agents.
The data collector agents and the home
controller have to be located in a computer in the
house of the elderly person. This computer does not
require attention by the person and no screen
associated to the PC is needed if it is not required by
the user. The maintenance of the SIAM agents must
be done by remote control from the CMD.
The caretaker agent is in a mobile device that
could be supported by another PDA in the home of
the caretaker or by another form of communication.
4 SIAM FALL DETECTION
SYSTEM METHOD
One of the activities monitored by SIAM is the
detection of possible cases of the assisted person
falling. After investigation of several devices and
existing systems for fall detection, it was decided to
use an easy and inexpensive device that is possible
to find in a wide spectrum of shops. The device
selected was the wii controller wiimote connected to
a sensor agent of SIAM through a Bluetooth
communication. This device allows for two
functions in SIAM: requesting help from the person
and the most important, the automatic fall detection.
The purser of the device will be used by the user for
requesting attention from SIAM or to communicate
his/her situation. The signals coming from the three
accelerometers of the wiimote will be used for fall
detection. The information supplied is in the range
of +5G to -5G corresponding to the maximum force
in the same axis of the direction observed, -5G
corresponds to the maximum force in the opposite
direction to the axis and 0 corresponds to no force
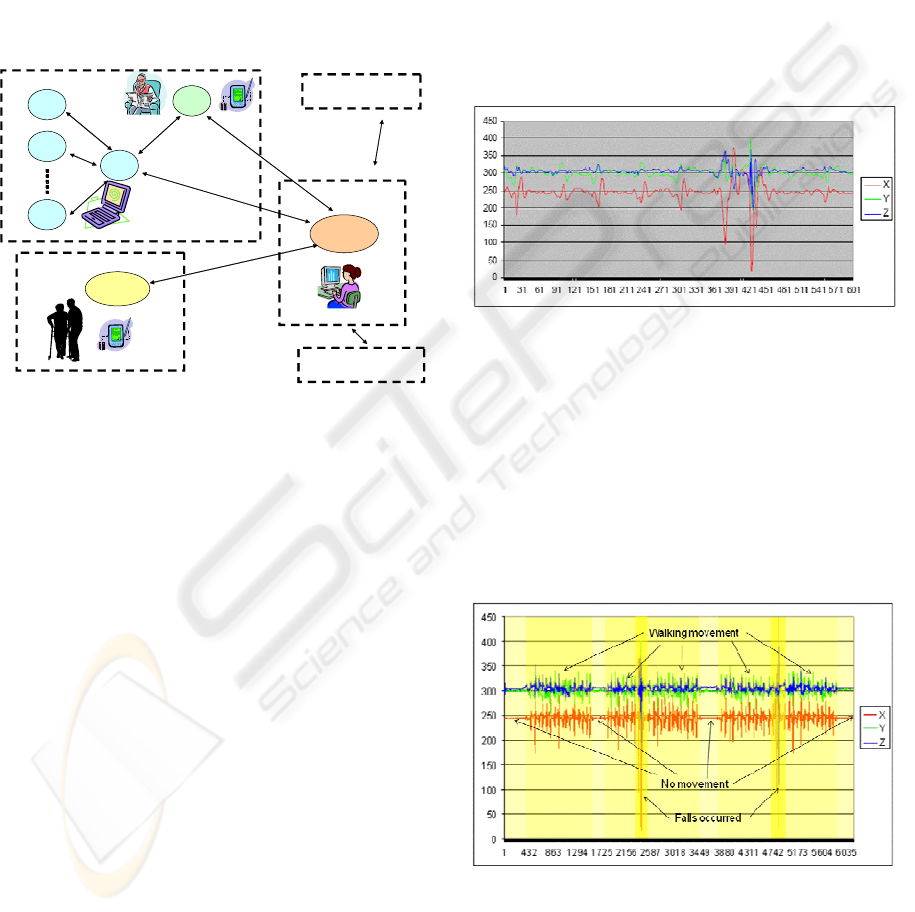
measured. An example of the values collected from
a sample of 6 seconds from the three accelerometers
is shown in Figure 3.
Figure 3: Information coming from a wiimote.
Figure 4 shows different types of movement
observed through the information collected from a
wiimote device using its accelerometers. In this
figure three kinds of movements can be observed: no
movement corresponding to repos, the person is
seated, the movement corresponding to the person
walking and two situations of the person falling. The
amplitudes observed are different and this suggests
the development of patterns for the detection of
movements, and in particular, possible falls.
Figure 4: Different movement situations.
After a deep analysis for the characterization of the
different movements to be detected, a self-organised
map was trained using as inputs the information
coming from the three accelerometers and their
MULTIAGENT SYSTEM FOR THE PREVENTION OF ACCIDENTS OF PEOPLE LIVING ALONE
301

standard deviations in a temporal window of 150
samples that correspond to approximately 1,5
seconds. Several simulations of different movements
were performed in order to configure a training set
of examples.
5 VIEWER AGENT
One special agent added recently to SIAM is the
viewer agent that facilitates a remote view in real-
time of a scene of the situation of the person when
an emergency situation is detected.
This agent has two components hardware and
software. It is mainly based on a small and low cost
robot that includes a camera. The image taken is
transmitted by wireless communication to the
VIEWER agent where it is made available for the
other agents for the processing that is required
according to the role of each agent. The robot has
been designed to be non-intrusive in the daily
activities of the person and to be only active in
exceptional situations when SIAM has a high
indication of an emergency occurring.
Some situations considered to be an emergency
by SIAM could be better evaluated if a real image
was available of what is really happening. This is
only an option of SIAM, but considered to be an
important value added over the rest of the agents.
The robot can operate automatically commanded
by the SIAM agents and also, can be manually
commanded through the caretaker or the CMD
agents.
Figure 5 shows the camera used for taking
images. It is a camera model Sony 1/3'' CCD CCTV
480 TV Line.
Figure 5: Camera of the VIEWER agent.
The camera is mounted on a low cost robot
especially designed for SIAM. This is presented in
Figure 6. Also, in this figure an antenna is observed
on the right side of the image. This is used for
wireless communication of the images taken and for
the remote control of the robot from the SIAM
platform.
Figure 7 shows a graphical scheme of the
components of the robot and the main flow of
information used between the robot and the
VIEWER agent of SIAM.
Figure 6: Robot commanded by the VIEWER agent.
Figure 7: Flow of information and main elements of the
VIEWER agent.
An important problem that is presently analysed
is charging the batteries of the robot. A design for an
automatic recharge with a special device for
plugging in the electrical network is being planned.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
302

6 COMMUNICATION WITH THE
USER
SIAM offers two ways of communications with the
user and vice verse using the type of agent USER. In
the original version of SIAM the user agent is
running in a mobile device such as PDA. It has an
interface which is extremely simple to use with big
symbols to communicate to and from the elderly
person. The user can activate one of three large
icons: emergency situation, communication with the
caretaker and asking some questions to the CMD.
Figures 8.a and 8.b show how the user observes
these icons.
8.a 8.b
Figure 8: Basic interface for the user agent.
Also, the user can receive warnings represented
by large icons about the need to review something
in the house that could be a risk for the person.
Figure 8.b shows an example of a warning telling
the user to turn off the gas. The structure and
interfaces of the caretaker agent are similar to those
of the user agent, and also, it is ready for running on
a PDA.
A new and easy method of communication
between SIAM and the elderly person has been
added recently through a new SIAM agent. The
objective and information is similar to that
previously described but using the digital TV as a
mean of communication.
7 CONCLUSIONS
This paper describes the main features of the multi-
agent system SIAM. It has been designed for an
automatic detection and prevention of possible risks
that could occur during the daily activities of elderly
people at home. SIAM will contribute to extending
the amount of time as much as possible that elderly
people can reside in their own homes assisted
continuously by an intelligent agent and using new
information technologies.
SIAM is a project which is continuously being
improving and this paper focused on the new
features added. The first feature described was a fall
detection system based on an inexpensive cheap and
easy to find device and a neural network for pattern
recognition of movements. Another feature
described in the paper was the remote view of a
scene when an emergency situation has been
detected using a camera mounted on a low cost
mobile robot. Finally, a new method of
communication between SIAM and the user through
digital TV has been presented. New features are
planned to be added to SIAM in future works and
the existing ones are being improved and reviewed.
REFERENCES
Aguilera, S., Colás, J., Campos, E., 2003. Multi Functional
Call Center for Disabled and Elderly People. Assistive
Technology Conference AAAT, Dublín.
Bresciani, P., Perini, A., Giorgini, P., Giunchiglia, F.,
Mylopoulos, J.. 2004. Tropos: An agent-oriented
software development methodology. Autonomous
Agents and Multi-Agent Systems, 8, p. 203-236.
Giansanti, D., 2006. Investigation of fall-risk using a
wearable device with accelerometers and rate
gyroscopes. Physiological measurement, 27, pp.1081-
1090.
JADE: Java Agent Development framework. Accessed in
August 2009 at http://jade.tilab.com/
Jih, W., Hsu, J. Y., Tsai, T., 2006. Context-aware service
integration for elderly care in a smart environment.
American Association for Artificial Intelligence
Workshop.
Liu, A. Hile, A., Kautz, H., Borriello, G., Brown, P.,
Harniss, M., Johnson, K, 2006. Indoor way finding:
Developing a functional interface for individuals with
cognitive impairment. Proceedings of the 8th
International ACM SIGACCESS Conference on
Computers and Accessibility.
Marschollek, M., Ludwig, W., Schapiewksi, I., Schriever,
E., Schubert, R., Dybowski, H., Meyer, H., Howe, J.,
Haux, R., 2007. Multimodal home monitoring of
elderly people – first results from the LASS study.
IEEE 21st International Conference on Advanced
Information Networking and Applications Workshops
(AINAW'07)
Pascual, J., Sanz-Bobi, M.A., Contreras, D., 2008.
Intelligent system for assisting elderly people at home.
HEALTHINF 2008: Proceedings of the first
international conference on health informatics,
Madeira, Portugal.
Pollack, M., 2005. Intelligent technology for an aging
population: the use of AI to assists elders with
cognitive impairment. AI Magazine, 26(2)
Reyna, R., Palomera, E., Gonzalez, R., Garcia, S. Clifford,
M., 2005. Human Fall Detection Using 3-Axis
MULTIAGENT SYSTEM FOR THE PREVENTION OF ACCIDENTS OF PEOPLE LIVING ALONE
303

Accelerometer. Reference Manual. Freescale
semiconductor.
Robocare. Project web page retrieved August, 2009 from:
http://robocare.ip.rm.cnr.it
United Nations, 2007. Department of Economic and
Social Affairs. World population ageing 2007.
Retrieved August 2007 from: http://www.un.org/
esa/population/publications/WPA2007/wpp2007.htm.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
304
