
A MULTI-AGENT SYSTEM FOR INTELLIGENT
BUILDING CONTROL
Norm Approach
Jarunee Duangsuwan and Kecheng Liu
Informatics Research Centre, The University of Reading, Building 4, Whiteknights, PO Box 241, Reading, RG6 6WB, U.K.
Keywords: EDA model, Norm aware agents, Intelligent agents, Intelligent buildings, Multi-agent systems, Norms.
Abstract: Most previous research in the intelligent buildings have proposed the controlling systems that can change
building environmental conditions automatically in order to save energy consumption and also to increase
an occupant’s satisfaction. Decreasing energy consumption and increasing occupant comfort are important
factors to indicate an intelligent building’s performance because it is a particular way to improve
productivity resulting in the business benefits. By applying agent technology, an intelligent building control
system provides a practical application that can minimize energy consumption levels, while keeping a
satisfying response to an occupant’s comfort. This paper proposes an abstract extended-EDA (Epistemic-
Deontic-Axiologic) model which is enhanced capability in order to make decision under norms: obligations,
permissions and prohibitions. The model is represented in terms of an individual agent that is prepared for
the multi-agent system of intelligent building control. The multi-agent system is proposed to combine the
comfort condition control with an energy saving strategy.
1 INTRODUCTION
According to a definition of intelligent building
(Himanen 2003), an intelligent building is a building
equipped with an integration of advanced
technology, especially the computer-based artefacts
and systems, in order to support automatic
adaptation to the changing environment conditions,
and to provide comfortable living conditions for the
current occupants as well. Most previous research in
the intelligent building control systems have been
designed by employing agent technology. An agent
is software that continually processes the input it
gets from its environment to determine the output it
should send back to the environment. Furthermore,
an intelligent agent has the following characteristics:
reactivity, pro-activity and social ability. Therefore,
such characteristics make an intelligent agent has
capable of autonomous actions in the environment in
order to meet its goals. A multi-agent system
(D'Inverno and Luck 2004) comprises at least two
agents. The agents in the multi-agent system can
interact with others so that this interaction must
result from one agent satisfying the goals of another.
The projects contributed by Magnus Boman et al.
(Boman, Davidsson et al. 1998; Boman, Davidsson
et al. 1999; Davidsson and Boman 2000; Davidsson
and Boman 2005) have been implemented in the
multi-agent system approach to implement building
control system. Such projects have the main goal to
increase energy saving and to meet customer
preference by automatic control of lighting and
temperature according to occupant’s requirement.
The multi-agent system composes of four categories
of agent. Personal comfort agents record the
personal preferences and try to increase occupant’s
satisfaction. Room agents represent and control a
particular room to maximize energy saving and to
make occupant feel satisfy at the same time.
Environmental parameter agents monitor and control
the environmental parameters in a particular room.
Badge system agents keep a track of location in the
building where the occupants are situated.These
agents are the BDI agents that are based on the
theory of practical reasoning stating that the agent’s
goals drive the agent’s behaviours. However,the
multi-agent system lacks the capability of learning
and predicting the occupants’ behaviors.
For intelligent building approach, an important
issue concerns with the energy saving policies.
Although, the multi-agent system for intelligent
building control proposed in our research is designed
22
Duangsuwan J. and Liu K. (2010).
A MULTI-AGENT SYSTEM FOR INTELLIGENT BUILDING CONTROL - Norm Approach.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Agents, pages 22-29
DOI: 10.5220/0002720000220029
Copyright
c
SciTePress

to adapt the environment factors such as
temperature, lighting, humidity according to the
preferences of occupant. However, such factors are
set under optimal energy. For a simple case, when a
private area such as office room is occupied by a
person, the environmental conditions should be
adjusted according to the current occupant’s
satisfaction. Furthermore, in a multi-occupant
scenario, making decision about the conditions is
more complex than a single-occupant scenario
because the conditions should be set by the certain
values in order to make most occupants in the room
feel comfortable as much as possible. Basically, by
using the average values to set the environment
conditions is the simple and reasonable method.
However, for our research it has been conducting on
a particular agent model that can make decision via
normative reasoning, and can be membership of
multi-agent system supporting the building control
system in order to provide both condition
recommendations for occupants’ comfort conditions
and saving energy conditions. We decide to enhance
the EDA model proposed by (Filipe 2000) to
construct a multi-agent system for controlling an
intelligent building because the model allows agent
to make decision under normative consideration.
The EDA model has been contributed by
combination between norms and corresponding
attitudes for supporting the organizational semiotics
approach. By the original EDA model, it was
proposed for normative reasoning in business
domain, and most agents were referred to human-
agent. However, the agents in our research domain
are both human-representing agents such as
occupant agents and artefact-representing agents
such as zone agents then the traditional EDA model
has been adjusted to support our research domain.
The following section begins by reviewing
background of relevant literature on BDI agent
model, norms, and normative agent. The framework
overview of multi-agent system for intelligent
building control in a single-occupant scenario, and
an extended-EDA model are represented in section
3. The final section provides a conclusion and the
future of our work.
2 RELATED STUDIES
2.1 BDI Model
The BDI model (Wooldridge and Jennings 1995)
proposed by Rao and Georgeff in 1991 is an agent
model that emphasizes an intentional notion of
agency. The original of this model is developed by
Michael E. Bratman via a theory of human practical
reasoning stating that an agent’s behaviour is driven
by its goals. According to (Jarvi 2004), the practical
reasoning is reasoning directed towards actions, so it
involves to the process of determining what to do.
By contrast, the theoretical reasoning most directly
affects beliefs. Therefore, the BDI model is behaved
in the same way like human practical reasoning by
adopting mental attitudes of Belief (B), Desire (D)
and Intention (I), respectively representing the
information, motivation, and deliberative states of
the agent. Beliefs represent the information of the
agent about the world, in other words its beliefs
about the world. Desires of agent refer to the
motivational state of the agent or may be thought of
as the task allocated to the agent. Furthermore, the
desires represent objectives or situations that the
agent would like to accomplish or bring about.
However, all of agent’s desires may not be achieved.
The agent’s intentions represent desires which the
agent has chosen and committed to.
2.2 Norms
Norms have been used in several words such as
‘pattern’, ‘standard’, ‘type’, but the meaning of
norms is been defined unclear because it is used in
many different senses (Wright 1963). Wright
categorized norms into three main types: rules,
prescriptions, and directives. Rules, e.g. rules of a
game, rules of grammar, are the explicit
standardized patterns then the rules can determine
which are right or wrong. Prescriptions or
regulations, e.g. military commands, traffic rules, are
commands or permissions that are issued by a norm-
authority to a norm subject. For directives or
technical norms, there are concerned with the means
that is used for attaining a certain end. ‘Directions of
use’ is an example of directives. According to
(Stamper, Liu et al. 2000), a norm is a field of force
that has been used to govern the behaviors of the
members in a society. Stamper et al. divide norms
according to social psychology classification into
perceptual, evaluative, cognitive and behavioural
norms. These four types of norms are respectively
associated with four distinct attitudes: ontological,
axiological, epistemic, and deontic. Besides, these
norms are elaborately outlined in (Liu 2000).
Perceptual norms concern with the ways of seeing
the world, the ways to receive signals from the
environment via human being’s senses through
media such as light, sound and taste. Cognitive
norms can help to incorporate the beliefs and
A MULTI-AGENT SYSTEM FOR INTELLIGENT BUILDING CONTROL - Norm Approach
23

knowledge of a culture, to interpret what is
perceived, and to obtain an understanding based on
existing knowledge. Evaluative norms are required
to evaluate the state of affairs, and also to explain
why people have certain beliefs, values and
objectives. The evaluation may be based not only on
the physical boundary but also on a social boundary.
Behavioural norms determine human being’s
behaviours within regular patterns. These norms
determine how agent should behave under given
certain conditions, and define what an agent should
perform to achieve a state of affairs under given
certain conditions. Denotative norms direct the
choices of signs for signifying, these depend on the
culture that may be a community or a social group.
According to norm classification by Wright, the
building policies are categorized as the prescriptions
or regulations issued by norm authority such as a
building owner, a local council, a government and so
forth. The regulations must be complied with norm
subject such as the occupants, the facility
administrators, the building managers, and so on in
order to control energy consumption. Usually, the
policies are expressed as pre-defined rules so these
rules are static and can represent as following simple
form:
IF nobody is present in the room
THEN the lighting and heating should be turned off
IF a room is the public area AND at least one person
appears in the area
THEN lighting is turned on AND the temperature is
set to 20 degree Celsius
Furthermore, the character, which is a
component of prescription, expresses the effects of
norm so the policies can be prohibited, permitted or
obligated. Therefore, the examples of rule
represented in table1 are declared to identify these
effects.
Table1: The examples of rule.
Category example
Obligation IF An occupant appears in a room
AND he is a room owner
THEN The BMS is obligated to set the
current room conditions according
to the current person’s preferences
Prohibition IF Nobody in present in the room
THEN The lighting and heating are
forbidden to turned on
Permission IF Time of weekdays is 6pm AND
room is occupied
THEN The room temperature are permitted
to set 20 Celsius
In addition, we distinguish the policies into four
priority levels:
Safety: to ensure that the environmental
conditions are set at the safe level, for example the
temperature of the building should be set at a
particular level in the winter to protect the water
pipes from freezing and cracking.
Security: to ensure that the environmental
conditions keep at a security level, for example in
case of an emergency circumstance such as fire
alarm, the emergency door should be opened.
Energy saving: to ensure that a low energy
consumption is achieved by dynamical controlling
so that if a room is unoccupied, the heating and the
lighting are switched off.
Comfort: to ensure that the room conditions are
set according to the occupants’ preferences
For the first two levels, we assume that the
controlling system is set to keep the both levels all
time then the later two levels are under our
considerations. Although the building policies are
defined to control energy consumption, the most
important aspect of an intelligent building is to take
consideration about personal preferences of the
people living or working in the building. The
personal preferences represented as the dynamic
rules provide comfort conditions that obtain from
behaviour learning of occupant in a particular room.
However, the goals of the building policies and the
personal preferences are conflict. In addition,
another conflicting goal situation is the adjustment
of environmental conditions in a shared area such as
a meeting room, a common room where the
occupants have the different preferences. For the
first conflict, we provide an agent that acts as a
negotiation agent to solve the conflict. The agent
determines whether the energy saving policy is not
affect the comfort of the current occupants, partially
affect the current occupant’s comfort conditions but
with in the limit of occupant’s preference thresholds,
or fully affect the current occupant’s comfort
conditions which means the current conditions
beyond the limit so it can be summarized as follows:
1) If the occupant’s preferences are not affected
then the energy saving policies are applied to set the
currently environmental conditions
(energy saving level).
2) If the occupant’s preferences are partially
affected then the standard conditions are used to set
the currently environmental conditions
(default
conditions set by BMS supporting both energy saving and
occupant’s well being).
3) If the occupant’s preferences are fully affected
then the currently environmental conditions are
adjusted according to the occupant’s preferences
(comfort level).
In case of a shared area, the conflict occurs
whenever at least two persons present in the shared
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
24

area. Therefore, we adopt norm approach, which is a
partial factor of decision making about the currently
environmental conditions, to reconcile contending
preferences from the different occupants. We
employ norms in two main tasks: 1) to assign the
priority to a particular occupant 2) to assign the
weight to normative goals and individual goals.
Whenever a room is occupied by more than one
person, we claim that a human being society, either
formal or informal, is set up, and leads to assigning
of role for each person in the society. For instance,
in a private area, such as an office room scenario, an
informal society is formed when anybody comes
into the room then the role of this scenario is
categorized into owner and visitor(s). On the other
hand, in a common area such as a meeting room, the
members of conference compose with a chairman, a
secretary, a president, a board of director etc. These
roles are considered as a formal role because it is
defined by the organizational structure in terms of a
hierarchical relationship. In a common room where
anyone takes a break for drinking, eating, relaxing
etc., an informal society occurs. Therefore, the
society is a lateral or peer-to-peer relationship. By
using a role concept, it will be adopted to classify
the different priority between particular occupants.
The high the occupant presents in the level of a
hierarchical relationship, the high the occupant gets
priority in the public area. Therefore, a relative
ordering on the values of occupants’ preferences is
created.
Norms represent what the members in society
ought to do, and their fulfilments can be seen as a
benefit of the overall system. However, in some
circumstances, individual goals conflict with the
norms. In a multi-occupant situation, each occupant
has the personal preferences that can be seen as the
individual desires. By contrast, the normative goals
are the certain environmental conditions that make
all occupants as comfort as possible. Therefore, two
steps of conflicting resolutions are needed. The first
step is to resolve conflict among the occupants for
finding the optimal preferences the make most
occupants feel comfortable. The optimal preferences
are evaluated by the system whether they fall in
which level: saving energy level or comfort level. If
the result falls in saving energy level then the second
step is not happen because the individual goals are
not conflict with the normative goals. In contrast, the
second step is initiated to resolve the conflict. In our
research, we adopt negotiation to reconcile the
conflict then a goal of negotiation is to maximize
occupant comfort and minimize energy
consumption.
2.3 The BDI Model and Norms
Norms, claimed by (Torre 2001), are used for
linking the gap between an agent level and a multi-
agent system level. This means that a role of norms
and obligations can support an agent society so
many previous researchers tried to enhance an
agent’s ability by proposing a novel agent model
that can make decision under norms: obligations,
permissions and prohibitions. Although BDI is the
most widely known model that is used to implement
an agent for individual and intentional decision
processes, this model was not been represented
nothing about the social aspects of agent being in the
multi-agent systems. However, the BDI model has
some limitation such as lacking of policy and norm
supporting ability then many researchers have
proposed the extended-BDI models for example;
extension of BDI model with norm (Dignum 1999),
Belief-Obligation-Intention-Desire (BOID) model
(Broersen, Dastani et al. 2001) ,normative agent
architecture (Lopez and Marquez 2004), EDA model
(Filipe 2000), and so on. These extending
architectures are the normative model addressing the
usage of norms and policies for reasoning and social
interacting. An agent that can reason about norms
and obligations is called a normative agent
(Verhagen 2000) or a deliberate normative agent
(Castelfranchi, Dignum et al. 1999). The deliberate
normative agent has explicit knowledge of the
enacted norms for reasoning, and can make a
decision whether to comply with norms or not in
some cases.
Broerson et al. (Broersen, Dastani et al. 2001)
have proposed BOID architecture that composes
with four basic components. The architecture
focuses on conflict resolution among informational
and motivational attitudes. The possible conflict is
classified into two types: internal and external
conflicts. The internal conflicts occur within beliefs,
obligations, intensions, and desires, and can be
categorized into four unary subtypes: B, O, I, D. The
external conflicts occurring between these
components can be distinguished into multi
subtypes: BO, BI, BD, OI, OD, ID, BOI, BOD, BID,
OID, BOID. The conflict resolution mechanism is
based on Thomason’s idea of prioritization which
can determine the type of an agent simultaneously.
The BOID architecture is discussed more detail in
(Broersen, Dastani et al. 2001). Lopez et al. (Lopez,
Luck et al. 2001; Lopez and Marquez 2004) have
proposed a framework representing the adoption of
norms towards the BDI agent. The authors present
an abstract normative agent architecture designed by
A MULTI-AGENT SYSTEM FOR INTELLIGENT BUILDING CONTROL - Norm Approach
25

merging the BDI agent architecture to three
components that can make the agent reason about
norms. Furthermore, the processes are included:
norm adoption, norm deliberation, and norm
compliance. Norm adoption is a process that decides
whether norms must be adopted or not. If the norms
should be adopted, then they can be represented in
terms of norm instances. Norm deliberation decides
which intended norms are fulfilled or unfulfilled by
agents. Norm compliance process applies both
intended norms and rejected norms to update the
agent’s goals which are affected by norms. After the
goals are updated, the intentions of agent might be
changed. The outcomes from those three processes
have proposed as the three mental attitudes that are
norm instances, intended norms, and rejected norms.
Besides, motivation is a component which agents
employ for assigning the preference values over
their goals. However, these components of norms
must be partly considered by the agents when a
normative decision must be taken at that time.
3 MULTI-AGENT SYSTEM FOR
INTELLIGENT BUILDING
CONTROL
3.1 Agents in the Multi-agent System
Due to the nature of intelligent buildings, when a
person is present in a room, the building control
system is initialized by setting the room conditions
via a standard set of preferences. In case of the
existing occupant who is recognized by the system,
the environmental conditions are adjusted according
to the occupant’s preferences retrieved from a
repository of the system. However, an occupant can
change the currently environmental conditions to
desired conditions when she/he feels dissatisfaction.
The agent who observes the occupant behaviours
and lifestyle must be provided for learning occupant
preferences and anticipating what the occupants
want. Although the system allows the occupants to
change the environmental conditions, the conditions
are controlled under the system’s goals that support
both energy conservation and occupant comfort. To
decrease energy consumption without affecting the
comfort of the building occupants, it is necessary to
determine an occupant breakdown of the energy
consumption in the building. In our research, a
multi-agent system used to implement the
controlling system consists of a collection of agents
that monitors and controls the building. The system
is situated in some environment, and that is capable
of autonomous action in the environment in order to
achieve its objectives. The following agents have
been proposed and will be implemented in our
research: 1) Occupant agent corresponds to a
particular occupant in a multi-agent system. The
occupant agent presents some personalities or
characters, monitors and adapts to the user's
activities, learns the user's styles and preferences.
The agent aims to maximize user’s preferences by
learning these preferences from observing user’s
behaviours. The occupant agent can reside on the
various tools for example; a personal computer, a
badge, a mobile phone, a radio frequency
identification (RFID) technology and so on. 2) Zone
agent corresponds to and controls a particular zone.
Basically, there are many sensors embedded in each
zone such as temperature sensors, lighting sensors,
blind sensors etc. In addition, the zone agent acts as
a negotiating agent to reconcile the conflict between
its goals and the occupant agent’s goals. We define
the smallest logical unit in the building as a single
room so a zone is a single room, or composes with
more than one room. 3) Manager agent directly
interfaces to building management system (BMS) by
sending the final decision for governing the
location’s environment to BMS. 4) Environmental
control agent monitors and controls different
environmental parameters in each zone. For
example, a temperature agent can read the
temperature sensor, and can control the actuator in a
zone.
3.2 Single-occupant Scenario
Normally, the preferences of a particular occupant
are set when the occupant enters the room at the first
time. As illustrated in figure1, when an occupant
signs into the system, an occupant agent
corresponding to the occupant provides a zone agent
with the personal information and preferences. The
zone agent decides the new conditions under
building policies and occupant’s comfort. Hence,
these conditions are passed to a manager agent for
changing to BMS-format commands. The manager
agent sends these commands to the BMS to enforce
these commands requested by the multi-agent
system. However, if an occupant does not change
the environments, for example by changing the
temperature or by adjusting the heating, a system
assumes that the current environments are
comfortable for the occupant. By contrast, as
represented by figure2, if an occupant changes the
current conditions by using the occupant agent, the
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
26
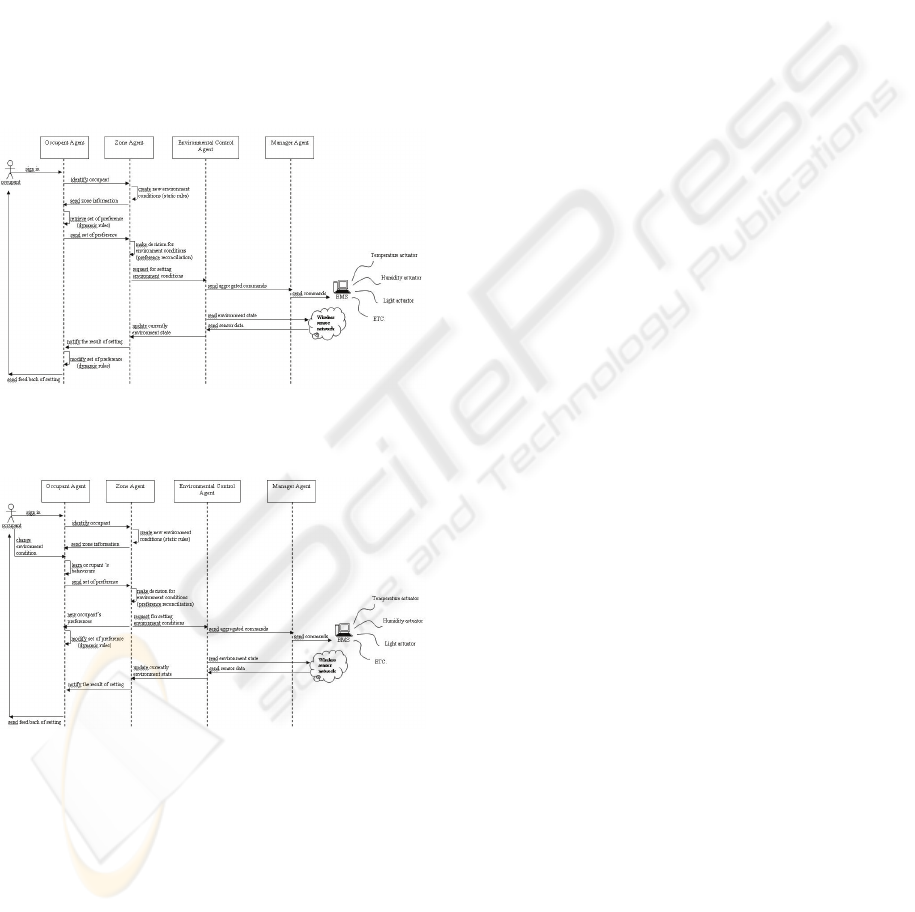
new changed conditions are observed and learned by
the occupant agent. The occupant agent calculates
the new preferences that will forward to the zone
agent for evaluation whether the new preferences
conflict with the building policies or not. If the
conflict occurs; for example, the occupant agent A
desires to set temperature at 20°C. The A’s desire
may conflict with a normative goal of the zone agent
Z which set the temperature at 25°C for energy
conservation (building policy); then the zone agent
reconciles the conflict. Subsequently, a result of
reconciling is sent to the occupant agent for updating
the occupant’s preferences, and is sent to the
environmental control agents to adjust the
environmental conditions.
Figure 1: Sequence diagram of multi-agent system for IB
in a single occupant scenario.
Figure 2: Sequence diagram of multi-agent system for IB
in a single occupant and learning scenario.
For a multi-occupant scenario described in section
2.2, a conflict of preference may or may not occur.
According to the capability of an intelligent building
control system, the environmental conditions of a
building are set at the optimal comfort conditions.
We assume that if the occupants do not take any
actions, they prefer the current conditions then a
conflict does not happen. However, if someone
requests to change the current conditions,
negotiation among occupants is needed. We adopt
norms to resolve the conflict occurring between the
normative goals and the individual goals. A
particular occupant in a multi-occupant scenario has
the individual preferences then a preference conflict
among the occupants may happen. Therefore, the
negotiation that will be implemented by the
blackboard concept is used to reconcile the
occupants’ conditions. We implement the
negotiation between the occupants by using
blackboard system that can be compared with
technologies such as message queues and databases
where a simple API for the manipulation of entry
objects: insert, read, delete can be used when some
type of object is available at (Creswell
http://www.dancres.org/cottage/javaspaces.html).
The preliminary negotiating design has been
proposed in (Duangsuwan and Liu 2008) but in this
paper we pay attention to how to use norm approach
reaches a joint preference of the occupants. To
design agent architecture for negotiating and making
decision under norm consideration, we were inspired
by the EDA model so an extended-EDA model has
been proposed to enhance the EDA model.
3.3 The Extended-EDA Model
The concept of EDA model has been contributed by
combination between norms and corresponding
attitudes. The main components of model are
epistemic component (E-component), deontic
component (D-component), and axiologic
component (A-component). Furthermore, two
external components are included: a perception
interface obtaining and interpreting external events
from the environment, and an action interface
sending the output actions to the environment. The
EDA model has its own beliefs represented in E-
component that contains current beliefs or facts
about the world. The obligations, rights and
behaviours of agent are set in D-component where a
set of plans is declared in terms of the interesting
behaviours of agent. A-component is an evaluating
component for assigning a preference relationship
among the available plans in D-component. The
component provides a dynamically value-setting
method for agent in order to assign the importance
of norms. Therefore, the constituted obligations are
assessed through axiology then the committed
intentions are established.
The EDA agent is allowed to reason about norms
then the components and processes involving norms
are included into the extended-EDA model. From
our perspective, norms are the external forces that
A MULTI-AGENT SYSTEM FOR INTELLIGENT BUILDING CONTROL - Norm Approach
27
might influence the agent capabilities or behaviours.
Initially, an agent may hold a set of capabilities and
certain desires to deploy these capabilities but by
adopting norms, the agent’s capabilities are partly
determined by obligations which the agent must
comply with, prohibitions that restrict some kind of
capabilities which the agent can pursue, or
permissions that expand the capabilities for the agent
to choose. A multi-agent system forms an agent
society. Whenever an agent joins a society or an
organization, it will be bound to certain rules and
regulations. The adoption of norms will specify
agent with a specific social position or role. This
role is annotated with certain duties, privileges,
authority, responsibility etc. Therefore, the agent’s
behaviours are behaved according to the adopted
norms ascribed to an agent’s role. The building
regulations and policies are presented as the external
forces pushed by the building owners or
administrators to save commercial cost, or pushed
by the government to encourage efficiency of energy
consumption.
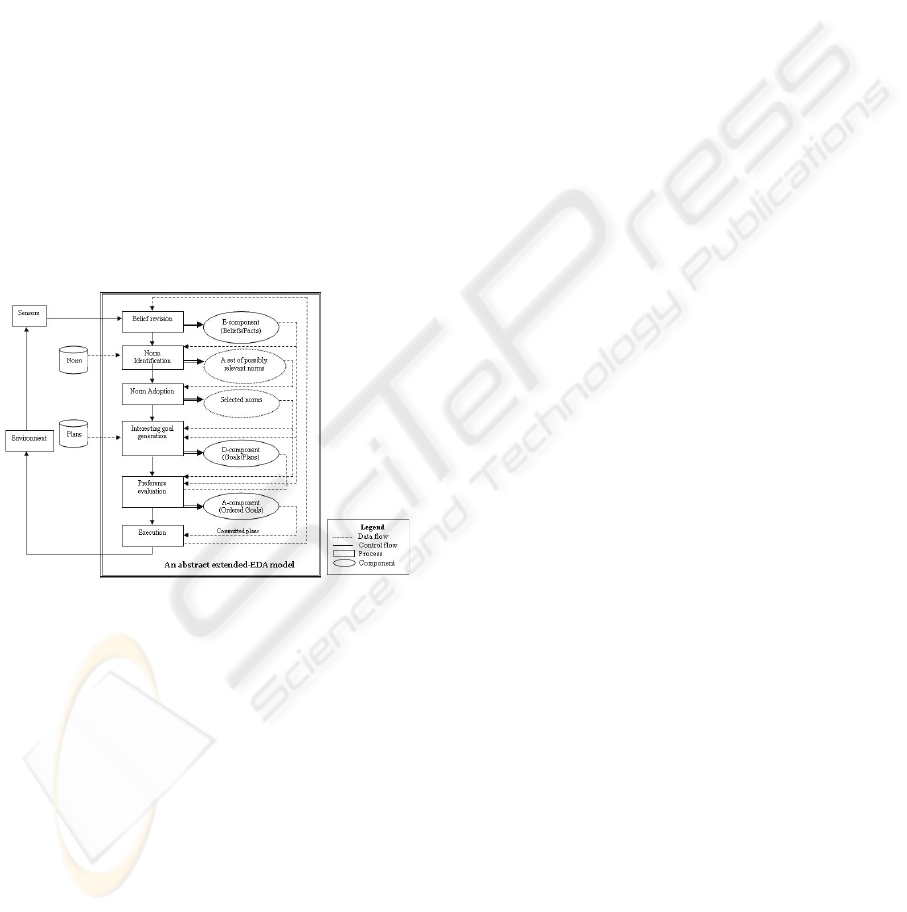
Figure 3: An abstract extended-EDA model.
We propose an abstract extended-EDA model
including the new components for norm reasoning.
Figure 3 illustrates the proposed model prepared for
a multi-agent system to control the intelligent
buildings. The figure represents the internal
components and processes of a particular agent
which is the member of a multi-agent system. The
new two components, relevant norms and selected
norms, are added and merged to the EDA model. In
addition, the processes are depicted in order to
present data and control flow among the
components. Similar to other agent models,
changing of the environment is observed by the
sensors and is sent towards the system for updating
the beliefs in E-component via belief revision
process. E-component stores beliefs or facts that
correspond to the information that an agent have
about the world. The first process involving norms is
norm identification that responses to verify that
which norms in a norm base defined in advance
relate to the current beliefs held by an agent and may
be adopted for an agent’s reasoning later. A set of
possibly relevant norms is an outcome that will be
sent towards the next process. Norm adoption
process decides whether which norms must be
adopted to normative decision. The result of this
process is represented in terms of instantiate norms.
D-component represents goals, objectives, or any
states of affairs which an agent want to bring about.
According to the EDA model concept, D-component
is where the interesting behaviours of agent are
defined. The behaviours may be represented as the
partial plans at different levels. A goal is a very high
abstract plan, whereas a sequence of elementary
actions defines a plan at the instance level.
However, goal generation has one more step further
because it creates the goals based on norms. By
merging goals from goal generation process to the
selected norms, it can decide whether what goals are
brought about by an agent under the currently
selected norms. All candidate goals, which agent has
to bring about, will be kept in D-component. The
partial plans for achieving these goals are pre-
defined in a plan library which is a repository of all
plans that an agent knows. Once one of these plans
is adopted for execution, it is considered an intention
and an agent is committed to do it.
To make decision when goal conflicting occurs,
the agent’s goals are associated with preferences
because they are used to make decision in our model
not only to choose the goals for pursuing, but also to
decide the goals for preferring and achieving first.
The EDA is modelled to support this scenario by
proposing the A-component. The generalized goals
in D-component need to be assigned the value of
preference by preference evaluation process. An
outcome from this process is a preference set which
is different for each agent, thus an agent shows their
individual preferences towards the particular goals.
We represent the relevance between a preference set
and the particular goals by using the relationship that
will be created and stored in A-component. Because
decision making of the EDA agent depends both on
the available goals in D-component and a preference
relationship in A-component, both components are
combined to choose a goal. When a goal is chosen, it
becomes an intention. A-component concerns with
deciding whether which goals are placed in agenda.
The goals in the agenda become intentions of agent.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
28

The intentions are executed, and then the actions are
sent out to the environment.
4 CONCLUSIONS
We have designed a framework of multi-agent
system that controls the environmental conditions of
an intelligent building. A particular agent in the
multi-agent system is modelled under an extended-
EDA architecture enhanced the capabilities to
support normative decision making. Different from
the other systems, we have included norm concept
that promotes an increased flexibility towards the
policies and the preferences of occupants in the
building. Therefore, the multi-agent system in our
research gives a good support for extensions and
adaptations in the building’s policies that used to
control the energy consumption, and also makes the
building’s occupants feel comfort as much as
possible by using the ordering preferences supported
by role aspect to set the environment conditions of a
particular area. In the future, we will deploy our
extending model to test our framework that will be
implemented by eclipse software to build an agent-
based prototype for verifying the proposed model.
REFERENCES
Boman, M., P. Davidsson, et al., Eds. (1998). Energy
Saving and Added Customer Value in Intelligent
Buildings. Proceedings of the 3rd International
Conference on the Practical Applications of Agents
and Multi-Agent Systems (PAAM-98).
Boman, M., P. Davidsson, et al. (1999). Artificial
Decision Making Under Uncertainty in Intelligent
Buildings. the Fifteenth Conference on Uncertainty in
Artificial Intelligence, Stockholm, Sweden.
Broersen, J., M. Dastani, et al. (2001). The BOID
Architecture - Conflicts Between Beliefs, Obligations,
Intentions and Desires. In Proceedings of the Fifth
International Conference on Autonomous Agents,
ACM Press: 9-16.
Broersen, J., M. Dastani, et al. (2001). An alternative
classification of agent types based on BOID conflict
resolution. Proceedings of the 13th Belgium-
Netherlands Artificial Intelligence Conference: 79-87.
Castelfranchi, C., F. Dignum, et al. (1999). Deliberate
normative agents: principles and architecture. In
Proceedings of the Sixth International Workshop on
Agent Theories, Architectures, and Languages
(ATAL-99), Springer Verlag: 364-378.
Creswell,D.(http://www.dancres.org/cottage/javaspaces.ht
ml). "Getting started with JINI TM 2.x." Retrieved
20 May 2009.
D'Inverno, M. and M. Luck (2004). Understanding agent
systems, Springer.
Davidsson, P. and M. Boman (2000). A Multi-Agent
System for Controlling Intelligent Buildings.
Proceeding of the Fourth International Conference on
MultiAgent Systems. Boston, MA: 377-378.
Davidsson, P. and M. Boman (2005). "Distributed
monitoring and control of office buildings by
embedded agents." Information Sciences 171(4): 293-
307.
Dignum, F. (1999). "Autonomous Agents with Norms "
Artificial Intelligence and Law 7: 69-79.
Duangsuwan, J. and K. Liu (2008). Multi-agent Control of
Shared Zones in Intelligent Buildings. Computer
Science and Software Engineering, 2008 International
Conference on.
Filipe, J. B. L. (2000). Normative Organisational
Modelling Using Intelligent Multi-Agent Systems.
Staffordshire, Staffordshire University.
Himanen, M. (2003). The Intelligence of Intelligent
Buildings : The Feasibility of the Intelligent Building
Concept in Office Buildings. Department of
Surveying. Helsinki, Finland, Helsinki University of
Technology: 498.
Jarvi, J. (2004). BDI & Reasoning. http://www.cs.uta.fi/
sat/lectures/lecture-28-02/sat-lecture-28-02.pdf
Liu, K. (2000). Semiotics in Information Systems
Engineering, Cambridge University Press.
Lopez, F. L., M. Luck, et al., Eds. (2001). A framework
for norm-based inter-agent dependence. Proceedings
of the 3rd Mexican International Conference on
Computer Science.
Lopez, F. L. and A. A. Marquez (2004). An architecture
for autonomous normative agents. Computer Science,
2004. ENC 2004. Proceedings of the Fifth Mexican
International Conference in.
Stamper, R., K. Liu, et al. (2000). "Understading the roles
of signs and norms in ogranizations : A semiotic
approch to infomation systems design." Journal of
Behaviour & Information technolgoy 19: 15-27.
Torre, L. v. d. (2001). "Contextual Deontic Logic:
Normative Agents, Violations and Independence."
Annals of Mathematics and Artificial Intelligence 37:
33-63.
Verhagen, H. J. E. (2000). Norm Autonomous Agents.
Department of Computer and Systems Sciences.
Stockholm, Sweden, The Royal Institute of
Technology and Stockholm University.
Wooldridge, M. J. and N. R. Jennings (1995). Intelligent
agents: Theories, Architectures, and Languages.
Germany, Springer-Verlag.
Wright, G. H. v. (1963). Norm and action - A logical
enquiry. London, Routledge & Kengan Paul.
A MULTI-AGENT SYSTEM FOR INTELLIGENT BUILDING CONTROL - Norm Approach
29
