
EVALUATION OF TRUST POLICIES BY SIMULATION
Cosmin Mogos¸ and Ina Schieferdecker
ETS, TU Berlin, Berlin, Germany
Keywords:
Trust modeling, Trustworthiness, Trust evaluation, Simulation.
Abstract:
The evolution of the World Wide Web has created a new environment where people can interact, e.g. talk
to their friends, shop online, conduct business meetings, etc. Trust and trustworthiness are central notions
in human interaction; in particular, they represent important criteria for every Internet user because of the
multitude of choices they are faced with when choosing whom to interact with.
This paper presents a simulation model implemented in Ptolemy II for the simulative analysis of trust policies
in networked environments, called communication space (CS). The model reflects both the CS structure e.g.
principals, roles, and event structure, and the interactions between the elements of CSs. Principal behavior
is based on Markov chains and on criteria for selecting peers that initiate transactions. We investigate the
efficiency of trust policies based on local observations and evaluation of interactions by examining a case
study based on the popular auction site eBay.
1 INTRODUCTION
The adoption of Internet technologies in almost ev-
ery private, economic and social sector made trust
and trustability central notions of networked environ-
ments, called communication spaces (CS). The notion
of communication space (CS), in opposition to iso-
lated single communication mechanisms, has recently
been proposed as a conceptional guideline for a multi-
disciplinary project on Human-Centric Communica-
tion at TU Berlin, which expands initial concepts on
I-centric communication (Arbanowski et al., 2004).
Users of CSs make use of offered services only if they
perceive that they can trust the service providers and
the involved technologies.
There has been extensive work done towards for-
malizing trust, but there is no generally accepted
method of evaluating trust models. The Prisoners’
Dilemma (Axelrod, 1984) was used by several au-
thors to test their models, but such approaches do
not reflect the complexity of virtual environments and
are also inherently confrontational. (Schlosser et al.,
2005) has proposed a framework for evaluating repu-
tation systems that are freely configurable by the user,
but because the focus is on reputation, direct experi-
ence cannot be represented by the framework. The
ART testbed (Fullam et al., 2005) proposed a frame-
work to compare multiple trust modeling algorithms
in competition with each other, however because the
best trust model is chosen based on an overall score,
evaluating separate trust aspects is difficult.
As trust is largely built from experience, trust
models have been developed to reflect this concept.
Trust policies are therein used to formalize the evalua-
tion of experiences with respect to trust. The results of
trust policies are however hard to assess in networked
environments where typically a large number of pre-
dominantly unknown principal identities are engaged
in interactions. It is open how to select trust policies
that result in a more successful choice of trusted par-
ties to interact with.
Therefore, we developed a simulation framework
within Ptolemy II (T et al., 2003) to analyze and eval-
uate the dynamics of trust policies in face of flexible
user-to-user interactions. The simulation framework
is based on the formal SECURE framework (Krukow,
2006), which builds upon event structures to model
possible outcomes of interactions. In (Eilers and
Nestmann, 2009), SECURE was extended with a flex-
ible way to determine a degree of trust from given past
behavior, and a basic notion of context, exemplary in
the form of roles the interacting parties may occupy.
(Eilers and Nestmann, 2009) constitutes the basis for
our trust simulation framework.
The paper is structured as follows. Section 2
presents the simulation approach being developed and
Section 3 discusses our case study and first results. A
conclusion summarizes the paper and discusses ongo-
ing work.
178
Mogo¸s C. and Schieferdecker I. (2010).
EVALUATION OF TRUST POLICIES BY SIMULATION.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Agents, pages 178-183
DOI: 10.5220/0002720501780183
Copyright
c
SciTePress

2 THE TRUST SIMULATION
APPROACH
2.1 Trust Model
There have been several approaches towards a for-
malization of trust each focusing on a different as-
pect. Trust models can be classified using a number
of criteria where three aspects are particularly relevant
(Ries S., 2006): trust value domain, dimensions, and
semantics. The simulation framework uses the trust
structure defined in SECURE to capture these aspects.
A trust structure is a triple T = (D, v, ) where D is
a set of trust values ordered by two partial orders: the
trust ordering () and the information ordering (v).
Within the SECURE framework experience gath-
ered from interaction with other principal identities is
stored in a local interaction history as observed events
from a mathematical structure called an event struc-
ture. In (Eilers and Nestmann, 2009) context infor-
mation (e.g. role, session etc.) is added to the local
interaction history and a justification language is in-
troduced to derive trust from experience.
2.2 Simulation Framework
We use the SECURE trust structure and the justifi-
cation language (from the extended SECURE model)
to represent trust models in the simulation framework
whose main focus is the evaluation of trust policies.
While an effective trust policy should adapt to dif-
ferent scenarios, some may be better suited than oth-
ers given a fixed scenario. The simulation framework
provides tools to define different scenarios in which
to evaluate trust policies. A scenario has the follow-
ing components: communication space, trust policies,
principal behaviors, and scenario setup. The compo-
nents are generic and can be be combined in different
configurations to generate new scenarios.
We use the following properties to represented
communication spaces within which the principals in-
teract:
Roles. The set of roles which principals can take in a
CS. Principals can have one or more roles. Each
role can either produce a ”service” or require one
(”client” role), e.g. in a hospital CS a doctor could
provide ”consultation” and a patient could require
it. The ”service” is not limited to an economical
product, it could e.g. be ”advice” in the case of a
family communication space.
Trust Structure. Facilitates a common understand-
ing of trust values for the principals in a CS.
Event Structure. Describes the possible actions that
can be taken by different principals.
Trust policies are defined using the justification
language from the extended SECURE model and are
closely related to the event structure and trust struc-
ture defined within the CS. Principal behavior is de-
fined using finite state Markov chains (Kemeny and
Snell, 1983). Fig. 3 shows the model for a reliable
seller which is described in detail in Section 3. Each
state of the behavior model consists of one or more ac-
tions. An action reflects the behavior of the principal
when observing an event. Each action has a trigger
and a set of events to be generated when the trigger
is observed. One state cannot have two actions with
the same trigger but every state should cover all the
possible triggers.
The simulation scenario setup defines how the dif-
ferent components work together. It has the following
parameters:
Principal Types. Selects the roles, behaviors (for
each role) and policies (defined using the justifi-
cation language) that a principal of the type will
have. If a principal has ”client” roles than the
threshold for interaction with a producer is also
defined.
Principal Setup. Determines the number of princi-
pals of each type that will be simulated, it also sets
the number of interactions, time of first interac-
tion, interaction frequency and behavior change
frequency for those principals
Interaction Initialization. The events that have to
be triggered in order to initiate an interaction be-
tween two principals.
Event Transformations. Because communication
takes place through a CS, principals do not
directly observe the actions of their partner,
they observe the CS responses. This parameter
determines how events generated by a principal
are observed by another.
Different scenarios can be defined in order to eval-
uate different properties of trust policies. For example
the scalability of a trust policy can be verified by in-
creasing the number of principals; the accuracy of a
trust policy can be evaluated by increasing the num-
ber of malicious or incompetent principals. Also the
framework can be used to evaluate one policy within
different scenarios or to compare different policies
within the same scenario.
2.3 Interaction Model
The previous section described how scenarios can be
defined, in this section the simulation engine is out-
EVALUATION OF TRUST POLICIES BY SIMULATION
179

lined. Experience is represented in the extended SE-
CURE model by recording observed events in a local
interaction history. The simulation framework also
uses events as the building blocks of principal interac-
tion. A principal can either observe an event or gener-
ate one as a response to an observed event. If a princi-
pal A generates an event in an interaction with princi-
pal B the simulation engine translates it (based on the
Event Transformations parameter) into an observed
event for principal B. This is necessary because the
two principals do not interact directly and cannot ob-
serve the exact actions of their partner; they can only
observe the results. For example principal A could
ship the product on time but because of a mix up with
the post office the package never arrives at principal
B. All that principal B can observe is that the package
never arrived which may falsely lead to flagging prin-
cipal A as untrustworthy, even if the fault lies within
the technical system used. All the events that can be
generated/observed in a communication space are de-
fined in the Event Structure parameter of the CS.
Principals interact with each other based on the
roles they have, when a principal requires a service it
will query the simulation engine for providers of that
service. Out of the available providers the one with
the highest associated trust value is selected for the
interaction. The selected principal must have an as-
signed trust value higher then the threshold defined in
the Principal Setup. If there are more principals with
the same trust value the one with which the consumer
interacted the most will be selected, because the trust
value is based on a larger information base. Finally,
if more than one candidate remains one is selected
at random. Also, if there is no information available
about providers one is selected at random.
When a consumer chooses a provider it signals
the choice to the simulation engine which initiates a
session (interaction) between the two. By session we
understand one atomic interaction between two prin-
cipals. In order to initiate a session the simulation
engine searches for the appropriate events (from the
Interaction Initialization parameter) to be triggered
based on the roles of the interacting principals. Af-
ter the initialization events are triggered, each princi-
pal will respond to observed events according to it’s
behavior. A session is considered to end when nei-
ther principal has events to generate. During the in-
teraction the simulation framework updates the local
interaction histories of the two interacting principals.
Time is an important factor when determining a
principal’s trust, for example a positive event ob-
served a year ago can have little importance if the
most recent observed events indicate the principal is
now untrustworthy. Also a few attacks (Sun et al.,
2006) on trust evaluation are based on changing be-
havior at different points in time hoping that old un-
trustworthy behaviors have been forgotten. The simu-
lation framework represents time as a natural number,
this allows a time unit to reflect different amounts of
time (second, week, year, etc.) depending on the sce-
nario.
Interactions between principals can begin at any
time and more than one session can be opened for
each principal at a given time. The main parameters
that determine when interactions take place are time
of first interaction, number of interactions and inter-
action frequency. The parameters are only relevant
to principals that have consumer roles, a principal be-
gins initiating sessions at time of first interaction and
after number of interactions it stops. When all prin-
cipals have finished their interactions the simulation
ends. By adjusting the parameters, the effects of two
CS properties can be examined (Sabater, 2004): Prin-
cipal Interaction Frequency and Encounter Factor.
The former property determines how often principals
interact within the CS, and is important because de-
pending on the frequency it may be easier or harder
for principals to derive trust from direct experience.
The latter parameter reflects the probability that two
principals will interact several times, this parameter
is closly related to the number of principals and the
Principal Interaction Frequency.
3 CASE STUDY AND FIRST
RESULTS
The case study is based on the popular virtual mar-
ketplace eBay. Users of eBay are required to create
an account in order to use the full functionality of the
site, this allows their identity to be confirmed when-
ever they take an action. We are going to assume that
the identification works perfectly, i.e. users are al-
ways who they claim to be.
Users on eBay can search for auctioned items, bid
on existing auctions, or create their own auctions. In
order to focus on how trust is derived from local ob-
servations, only the interactions that take place after
a user wins an auction are simulated. Users can be
in one of two roles: seller and buyer which trade one
product type. It is considered that each seller has an
infinite supply of products and can handle any number
of simultaneous interactions. As a result when a buyer
requires a product, she selects the seller she trusts the
mosts and it is considered that the buyer won an auc-
tion initiated by the seller, so the simulation engine
sends the appropriate events to initiate the interaction.
Fig. 1 illustrates the events that can be observed
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
180
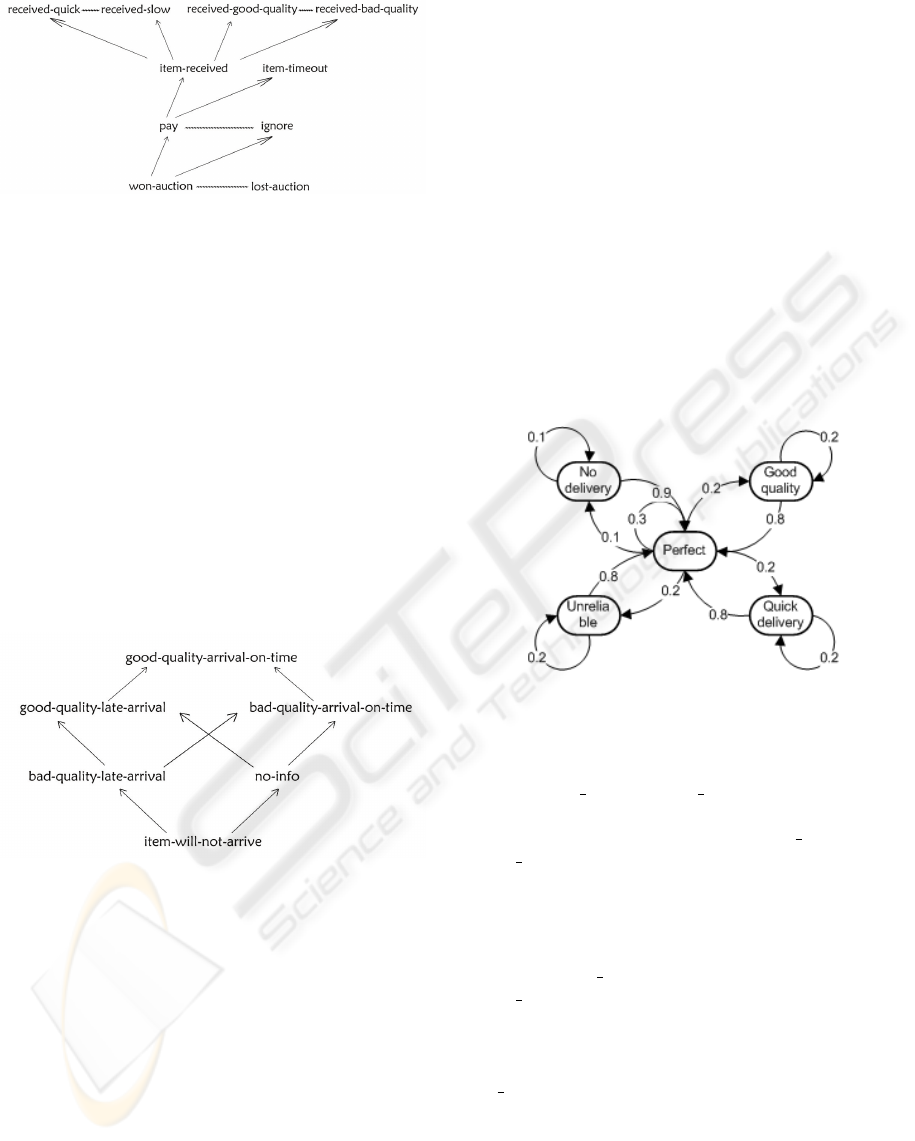
Figure 1: Buyer event structure.
by a buyer, the arrows represent dependencies and the
wavy lines represent conflicts. The events that can be
observed by the seller are complementary, e.g. pay is
observed as payment-received by the seller. Hav-
ing different event structures allows the simulation of
cases when the buyer pays, but because of a bank er-
ror the payment does not reach the seller.
We chose five trust values to represent the relia-
bility of a seller as perceived by a buyer, illustrated in
Fig. 2. The figure also shows the trust ordering, the
value no-info indicates that there is no information
about a seller, and is considered higher than item-
will-not-arrive since there is the possibility of en-
countering a trustworthy seller. As for the informa-
tion ordering all trust values are greater than no-info,
and are unrelated to each other.
Figure 2: Client trust structure.
The following justifications were chosen to derive
trust from local observations:
• item-will-not-arrive - always true
• bad-quality-late-arrival - if in all the sessions in
which the buyer payed the item has arrived, and
at least in one session the item was received slow
and at least in one session the item was of bad
quality
• bad-quality-arrival-on-time - if in all the ses-
sions in which the buyer payed the item has ar-
rived quickly but at least in one session the item
was of bad quality
• good-quality-late-arrival - if in all the sessions
in which the buyer payed the item has arrived and
was of good quality but at least in one session the
item was delivered late
• good-quality-arrival-on-time - in all sessions in
which the buyer payed the item was received
quickly and was of good quality
If the local interaction history is empty than no-
info is justified.
The metric used to evaluate the policies is the rate
of successful interactions, an interaction is considered
successful when the outcome is the one expected by
the buyer, if the buyer does not have any more sellers
it trusts all remaining interactions are considered to
be failed. In the case of a buyer with the threshold
set to good-quality-late-arrival, an interaction
is successful if the buyer pays and the item is received
and of good quality.
Figure 3: Reliable seller.
For the first simulation, a reliable seller (Fig. 3)
behavior was chosen. The behavior has four states:
perfect, good quality, quick delivery and unreliable.
In the perfect state, items are delivered quickly
and are of good quality, in the good quality and
quick delivery states items are either delivered in
good quality or quickly, and in the last state (un-
reliable) items are delivered late and are not of
good quality. We chose the transitions so that the
seller is usually in the perfect state (58%), fol-
lowed by good quality (34%), unreliable (5%) and
quick delivery (3%). In this setting, the item will be
of good quality about 92% which can be considered
to be a reliable seller.
The buyer behavior has only two states pay and
not pay, and the transitions are chosen in such a way
that the main state is pay (in 90%). Since we eval-
uate the policies of a buyer, we could have chosen a
perfect buyer that always pays, but the behavior of a
buyer has influence on the outcome of an interaction,
so limiting the behavior would also limit the amount
of situations that arise. For example, if the buyer does
not pay than it is normal to expect the seller not to
EVALUATION OF TRUST POLICIES BY SIMULATION
181
send the item, this is important for calculating trust
because a buyer needs to know how to interpret the
item-timeout event. If the buyer has payed and ob-
serves the item-timeout event than the seller is un-
trustwothy but if the buyer did not pay labeling the
seller as untrustworty would be wrong.
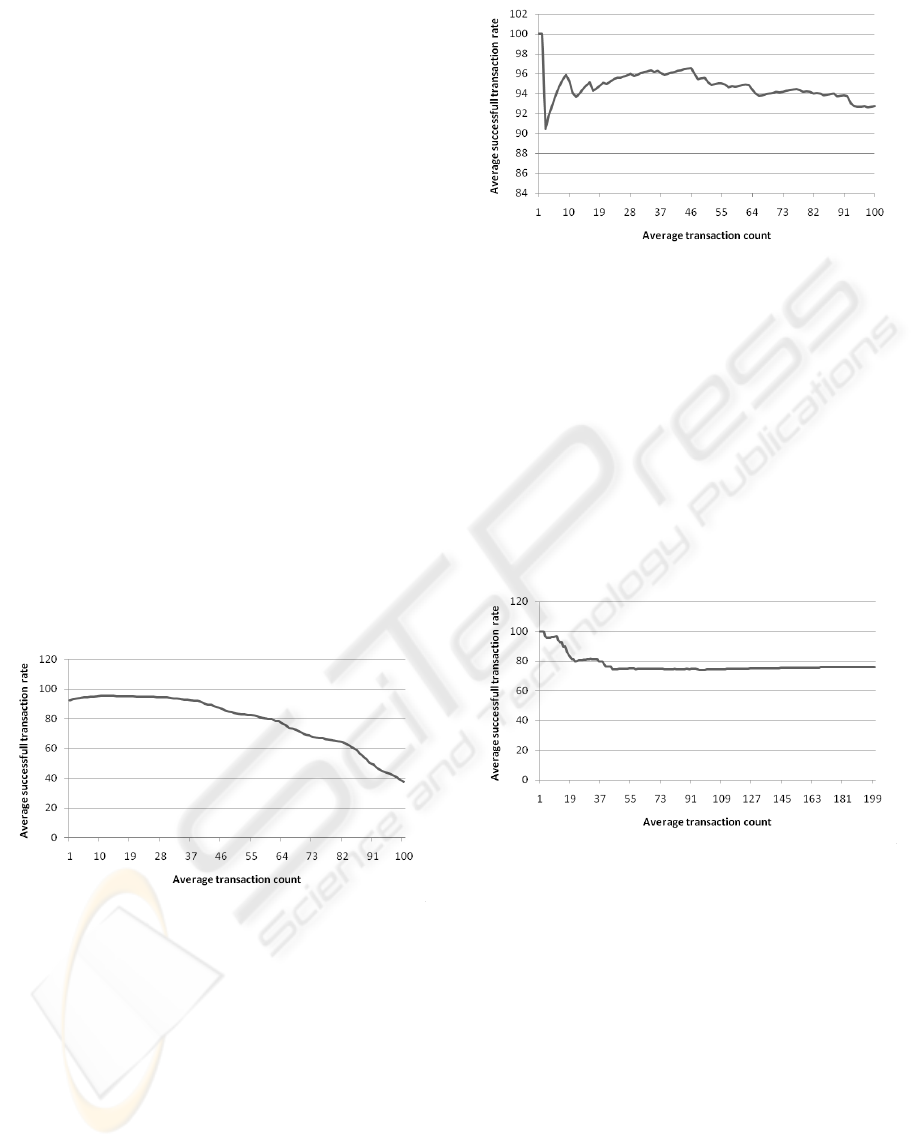
The simulation was run with 500 buyers and
5 sellers using the behaviors described above, the buy-
ers had a 100 interaction limit and had the threshold
set to good-quality-late-arrival. Fig. 4 shows
the average successful interaction rate with the av-
erage number of interactions per principal. While
within the first interactions the rate is high, it begins to
deteriorate as the average number of interactions in-
creases. The main reason for the result is that the poli-
cies described above are too strict: at the first ”bad”
interaction with a seller (when the product is received
in bad quality) the trust for that seller decreases in-
stantly and becomes lower the threshold. The curve
is stable within the first interactions because the buy-
ers still have sellers not flagged as untrustworthy, and
after marking a seller as untrustworthy they selected
another one for which they have no information to in-
teract with. By the end of the simulation 79% of buy-
ers have interacted with all the sellers and 61% have
not completed all the interactions because they ran out
of trustworthy sellers.
Figure 4: Successful interactions for the first run.
In order to improve the results, the justifications
were modified to use quantifications, for example
qood_quality_late_arrival would hold true if in
90% of the sessions in which the buyer payed the item
has arrived and was of good quality but at least in
10% of the sessions the item was delivered late. Us-
ing the new justifications, the simulation was run us-
ing 500 buyers and 5 sellers with the same behaviours
as before. The average successfull interaction rate is
show in Fig. 5.
Using the more flexible policy, the average suc-
cessful interaction rate remained over 90%, mainly
because the number of sellers falsely flagged as un-
Figure 5: Successful interactions for the second run.
trustworthy was smaller.
In the next run malicious sellers were added, they
behave perfectly for 400 interactions and then for the
next 400 they do not ship the products that were paid
by the users. The goal is to build a good reputation
and then scam buyers until the trust values buyers as-
sociate with them decreases. The setup has 10 reliable
sellers, 3 malicious sellers and 100 buyers, the results
are illustrated in Fig. 6. The average successful in-
teraction rate decreases until all malicious sellers are
identified and then remains constant.
Figure 6: Successful interactions the third run.
For the last run, we introduce two roles for the
sellers (which offer different products) and two roles
for buyers (that require the new products). The setup
contains 5 sellers that have both roles and 200 buy-
ers split into two groups that have different local trust
policies based on the flexible one presented above.
All the sellers have the same behaviors, one role uses
the reliable behavior described in the previous exam-
ples, and the other uses a perfect behavior (all prod-
ucts are shipped fast and in good quality). The first
buyer group calculates trust separately for each role
while the second group calculates trust by using the
local history from both roles. The average interaction
success rate is shown in Fig. 7, the dotted line shows
the rate for the first group and the solid line for the
second group.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
182

Figure 7: Successful interactions the fourth run.
The second group has very good results, maintain-
ing a success rate over 96%, while the first one has
a drop towards the end of the simulation. Because
the buyers in the first group completely ignore the be-
haviour of a seller in other roles than the one that is
required they calculate trust using limited data and as
a result they have a higher rate of false positives which
leads to the drop in success rate.
4 CONCLUSIONS
This paper presented a simulation framework for the
evaluation of trust policies based on direct experience.
The simulation is based on formal models for the rep-
resentation of trust values and trust policies and can
be used to compare trust policies within clear scenar-
ios or to evaluate how one policy adapts to different
scenarios. Several parameters are monitored: the lo-
cal interaction histories of principals, their calculated
trust values, and their behavior during the simulation;
which can be used to analyze different properties of
the policies. Future work will extend the framework
to policies that take both direct experience and recom-
mendations from others into consideration.
The notion of time from the extended SECURE
model is supported by the simulation framework, and
allows principals to interact asynchronously. Sessions
can start at any time and there can be an unlimited
number of sessions active for one principal at any
moment. By changing simulation parameters, aspects
like the Interaction Frequency or Encounter Factor of
a CS can be evaluated. Future work will consider ad-
ditional aspects of CSs like technical trustworthiness
for the principals interactions.
While several principal behaviors can be repre-
sented by the model used in the simulation, the re-
quirement that future states only depend on the cur-
rent one may not hold true for complex malicious
behaviors which might change their states based on
analysis of other principals.
Many communication spaces use fully connected
network topologies where any two principals can
communicate directly, as such the simulation offers
only this topology. However there are other topolo-
gies that may prove interesting like peer to peer. Also
in order to simulate P2P networks events would most
likely require parameters, e.g. share(what), since
having a event for each shareable resource would
quickly become unmaintainable.
REFERENCES
Arbanowski, S., Ballon, P., David, K., Droegehorn, O.,
Eertink, H., Kellerer, W., van Kranenburg, H.,
Raatikainen, K., and Popescu-Zeletin, R. (2004).
I-centric communications: personalization, ambient
awareness, and adaptability for future mobile services.
IEEE Communications Magazine, 42(9):63–69.
Axelrod, R. (1984). The Evolution of Cooperation. New
York: Basic Books.
Eilers, F. and Nestmann, U. (2009). Deriving trust from ex-
perience. Submitted to the FAST International Work-
shop.
Fullam, K. K., Klos, T. B., Muller, G., Sabater, J., Schlosser,
A., Topol, Z., Barber, K. S., Rosenschein, J. S., Ver-
couter, L., and Voss, M. (2005). A specification of the
agent reputation and trust (art) testbed: experimenta-
tion and competition for trust in agent societies. In
AAMAS ’05: Proceedings of the fourth international
joint conference on Autonomous agents and multia-
gent systems, pages 512–518, New York, NY, USA.
ACM.
Kemeny, J. G. and Snell, J. L. (1983). Finite Markov
Chains. Springer.
Krukow, K. (2006). Towards a Theory of Trust for the
Global Ubiquitous Computer. PhD thesis, University
of Aarhus, Denmark.
Ries S., Kangasharju J., M. M. (2006). A classification of
trust systems. In On the Move to Meaningful Internet
Systems 2006: OTM 2006 Workshops, pages 894–903.
Sabater, J. (2004). Toward a test-bed for trust and reputation
models. In 7th International Workshop on Trust in
Agent Societies, pages 101–105.
Schlosser, A., Voss, M., and Brckner, L. (2005). On the
simulation of global reputation systems. Journal of
Artificial Societies and Social Simulation, 9.
Sun, Y., Han, Z., Yu, W., and Liu, K. (2006). Attacks on
trust evaluation in distributed networks. In 40th An-
nual Conference on Information Sciences and Systems
(CISS), pages 1461–1466.
T, L. H., Hylands, C., Lee, E., Liu, J., Liu, X., Neuendorf-
fer, S., Xiong, Y., Zhao, Y., and Zheng, H. (2003).
Overview of the ptolemy project.
EVALUATION OF TRUST POLICIES BY SIMULATION
183
