
ADABOOST BASED DOOR DETECTION FOR MOBILE ROBOTS
Jens Hensler, Michael Blaich and Oliver Bittel
Laboratory for Mobile Robots, University of Applied Sciences, Konstanz, Germany
Keywords:
Door detection, AdaBoost, Learning algorithm, Mobile robot.
Abstract:
Doors are important landmarks for robot self localization and navigation in indoor environments. Existing
algorithms for door detection are often limited to restricted environments. They do not consider the large
intra-class variability of doors. In this paper we present a camera- and laser-based approach which allows
finding more than 82% of all doors with a false positive rate less than 3% in static test sets. By using different
door perspectives from a moving robot, we detect more than 90% of doors with a very low false detection rate.
1 INTRODUCTION
In an indoor environment doors constitute signifi-
cant landmarks. They represent the entrance and exit
points of rooms. Therefore, robust real-time door
detection is an essential component for indoor robot
applications (e.g. courier, observation or tour guide
robots).
In the past, the problem of door detection has
been studied several times. The approaches differ in
the implemented sensor systems and the diversity of
environments and doors, respectively. For example,
in (Murillo et al., 2008) and (Chen and Birchfield,
2008) only visual information was used. Others, like
(Anguelov et al., 2004) apply an additional 2D laser
range finder and thereby receive better results.
From these approaches we find that there are
two major difficulties in autonomous door detection.
Firstly, it is often impossible to cover the entire door
in a single camera image. In our scenario, the robot
camera is close to the ground so that the top of the
door is often not captured by the robot’s camera (see
figure 1).
Figure 1: Illustrates typical door images, taken by the robots
camera. The top of the doors are occluded and also the di-
versity of doors are recognizable: The doors have different
poses, colors, lighting situations as well as different features
e.g. door gap or texture on the bottom.
The second difficulty is characterized by the large
intra-class variability of doors (even for the same door
types) in various environments. As shown in figure 1,
doors can have different poses, lighting situations, re-
flections, as well as completely different features. The
main features of a door are illustrated in figure 2. A
door can be recognized e.g. by its color or texture
with respect to the color or texture of the surround-
ing wall. Door gaps or door knobs are indicators of a
door, too. Even if some of these features are detected
in a single camera image, a robust algorithm should
detect the door by using the remaining features.
In recent work (Chen and Birchfield, 2008), these
two issues of door detection were solved by extracting
several door features from the robots camera images
and applying the AdaBoost algorithm (Freund and
Schapire, 1999). The algorithm combines all weak
features of a door candidate to receive a strong door
classifier, which allows to decide whether a door is
found or not.
For our situation this approach is not sensitive
enough. We could not reach the same high detec-
tion rate in our complex university environment with
a similar system (see section 4). Therefore, we add a
laser-based distance sensor. Further weak classifiers
were used to improve the detection results. In the ex-
perimental result section we demonstrate the perfor-
mance of our system on a large database of images
from different environments and situations.
53
Hensler J., Blaich M. and Bittel O. (2010).
ADABOOST BASED DOOR DETECTION FOR MOBILE ROBOTS.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Artificial Intelligence, pages 53-57
DOI: 10.5220/0002721200530057
Copyright
c
SciTePress
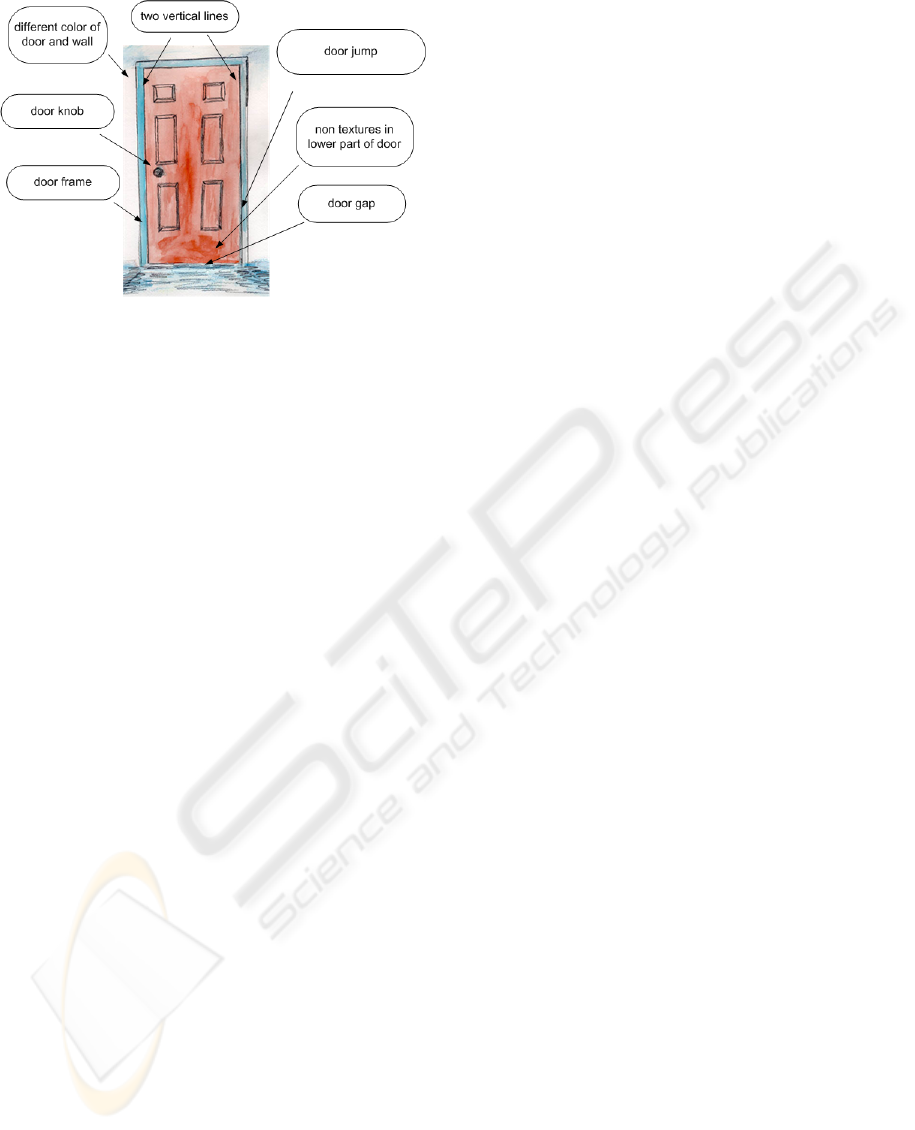
Figure 2: Characterizing features of doors.
2 THE ADABOOST ALGORITHM
The concept behind all boosting algorithms is to use
multiple weak classifiers instead of one strong clas-
sifier and solve the decision problem by combining
the results of the weak classifiers. Hereby, the weak
classifiers are build up to solve binary decisions. The
AdaBoost algorithm uses a training dataset to build
up a strong classifier. For this purpose, the algorithm
requires that each weak classifier reaches at least 50%
success rate in the training process and the errors of
the classifiers are independent. If this is given, the
algorithm is able to improve the error rate by calcu-
lating optimal weight for each weak classifier. The
output of the nth weak classifier to the input x is
y
n
= h
n
(x). If every y
n
is weighted with an α
n
which
is created during the training process, the strong clas-
sifier is given by:
H (x) = sign
N
∑
n=1
α
n
h
n
(x)
!
(1)
3 DETECTION OF DOOR
FEATURES
As mentioned before, we use the robot’s camera im-
age and the laser-based distance signal for door detec-
tion. Out of the camera image we extract vertical lines
to find door candidates in the images. For this pres-
election we assume that each door has a vertical line
on the right and left side. As a consequence, a door is
not detected, if the door posts are not visible. In the
next step we check each candidate for seven door fea-
tures which represent the weak classifiers: a door can
have a certain width WidthClassifier, the color of the
door can be different from the color of the wall Col-
orWallClassifier, a door can have a texture at the bot-
tom or not TextureBottomClassifier, a door may have
a door frame FrameClassifier or a door knob Knob-
Classifier, also a door gap GapClassifier is possible;
finally, the door can stick out of the wall JumpClassi-
fier. The buildup of the weak classifiers is described
in the sections below. Each classifier resolves a binary
decision. The best threshold for each classifier is mea-
sured with ROC curves by varying the threshold until
the best one is found. The classifiers GapClassifier,
ColorWallClassifier and TextureBottomClassifier are
similarly implemented like in (Chen and Birchfield,
2008) and not further mentioned here.
3.1 Preselection
During the preselection vertical line pairs generated
by the door frame represent door candidates for the
AdaBoost algorithm. To receive vertical lines we ap-
ply the Contour Following Algorithm (Neira and Tar-
dos, 2008). Compared to other transformations, this
method has the advantage, that we obtain the starting
and end points of these lines.
Not every combination of vertical line pairs in an
image correspond to door candidates. The number of
candidates can be drastically reduced by the following
rules:
• The vertical lines need to have a minimal length.
• The horizontal distance between the two vertical
lines has to be between a maximal and minimal
value.
• The end points of the vertical lines have a minimal
vertical shift.
• If there are lines close together, which all may
represent a door candidate according to the ear-
lier rules, only the inner lines are used. The outer
lines are indicators for a door frame.
3.2 Weak Classifiers
To improve our AdaBoost algorithm in comparison to
(Chen and Birchfield, 2008) we use four additional
weak classifiers. At first the door knob classifier will
be explained. For this classifier we used again the
line image calculated during the preselection of the
door candidates. However, for this classifier not the
vertical lines are important, but the almost horizon-
tal lines which result from the door knob. We use a
height from about 0.9m based on the bottom end of
the vertical lines to find the door knob areas. In these
two areas (left and right side of a door) the classifier
returns ‘true’ if at least two almost horizontal lines are
found.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
54

The second classifier is a door frame classifier. A
door frame is required to install a door inside a wall.
The frame can also be calculated during the deter-
mination of the vertical line pairs. A door frame in
an image is characterized by duplicated vertical line
pairs. If there is a close additional vertical line on both
sides of the door, the door frame classifier is positive.
Farther we use the door width to get one more
weak classifier. There is a DIN standard (DIN18101)
for door width. Unfortunately the DIN width values
vary strongly. Even here it is not easy to find a strong
classifier for a door. For a weak classifier we bordered
the width in values between 0.735m and 1.110m. To
calculate the distance between the two vertical lines
we use the laser distance data provided from the laser
range finder.
At last we consider that in many environments
doors are receded into the wall, creating a concave
shape for the doorway (see figure 3). This shape can
be obtained using the robot laser distance data. For
this the slope between each measured laser distance
in the door candidate area is calculated. There exists
a maximum and minimum slope value at the position
of the door candidate (see figure 4). The JumpClassi-
fier can be described by the following rules:
• If we calculate the slope between each measured
laser distance point, without considering the door
candidate, the standard deviation is almost zero.
• If we look at the slope at the door frame area we
will find values which strongly vary from the cal-
culated mean value.
4 EXPERIMENTAL RESULTS
To test the performance of the system, a database of
210 test sets were taken with the Pioneer2DX robot.
One test set consists of one camera image and one
laser profile at a certain time. We considered pictures
of doors and non-doors. From the 210 test sets we
took 140 for the training process of the AdaBoost.
The residual sets were taken to test our system. In
these 70 test sets our preselection algorithm found
overall 550 door candidates, of which 61 candidates
correspond to real doors. The result for each weak
classifier and the strong AdaBoost classifier is shown
in a ROC space diagram (see figure 5). As we can see
in the ROC space, the AdaBoost classifier reach the
best detection rate. In our test the true-positive rate for
the AdaBoost classifier reaches a value of 82% and a
false-positive rate of 3%. We receive the same result
if we take a look at the RPC methods (table 1). The
best value of the F-score (combination from precision
and recall) is obtained by the AdaBoost classifier.
Figure 3: The red arrows in the laser profile point to a door.
The images show that the door is not running with the wall.
It is receding or sticking out from the door.
Figure 4: Slopes between the measuring points from figure
3. We found turning points in the area of the door frame.
It’s used for the JumpClassifier.
Typically detected doors are illustrated in figure 6.
As can be seen, the algorithm is capable of detecting
doors under different lighting situations and different
viewpoints of the robot. It should be noted, that the
absence of one or more door features does not cause a
non-detection of the door. Figure 7 shows a false pos-
itive detection. They happen through walls or other
objects which look very similar to doors.
As a next step, we looked at the result without the
ADABOOST BASED DOOR DETECTION FOR MOBILE ROBOTS
55

Table 1: Results of the RPC methods. The F-score can be
interpreted as a weighted average of precision and recall,
where an F-score reaches its best value at 1 and worst score
at 0.
Recall Fallout Precision F-score
WidthClassifier 0,73 0,13 0,45 0,56
JumpClassifier 0,64 0,19 0,35 0,45
TextureClassifier 0,56 0,06 0,56 0,56
ColorWallClassifier 0,07 0,05 0,18 0,10
GapClassifier 0,61 0,35 0,24 0,34
KnobClassifier 0,80 0,19 0,39 0,53
FrameClassifier 0,54 0,29 0,25 0,34
AdaBoostWithoutLaser 0,61 0,07 0,56 0,58
AdaBoost 0,82 0,03 0,79 0,81
Figure 5: ROC space diagram of all classifiers. The best
value is reached at coordinate (0,1). The AdaBoost classi-
fier - the weighted combination from the other weak classi-
fiers - reaches the best detection rate.
laser range finder (similar to (Chen and Birchfield,
2008), see table 1 and figure 5 AdaBoostWithout-
Laser). This classifier combination (TextureBottom-
Classifier, ColorWallClassifier, GapClassifier, Knob-
Classifier and FrameClassifier) did not reach the
same high result (detection rate 60% and false pos-
itive rate 7%). With this result we claim that in a
strongly varying indoor environment with different
kinds of doors a camera-based door detection is not
strong enough to build up a powerful AdaBoost clas-
sifier. Further classifiers like the JumpClassifier and
WidthClassifier can improve the result essentially.
Another advantage of the laser range finder is that
the position of detected doors can be measured ex-
actly. In combination with the robot position the
doors can be marked in an existing map. The result
is a map with doors as additional landmarks for im-
proved robot localization and navigation.
We tested the system as a Player (Collett et al.,
2005) driver on our Pioneer2DX robot. We used
two different environments. In the first environment
(basement of the university) all doors were detected
(see figure 8). In the second environment (office en-
vironment) each door, except glass doors, was de-
tected (see figure 9). The problem here is, that we
Figure 6: Typically by the AdaBoost classifier detected
doors. The pictures demonstrate that our approach is ro-
bust against different robot positions, reflection situation as
well as different door features.
Figure 7: Picture illustrates a sample false-positive error of
the AdaBoost classifier. In the sample a wall, which looks
similar to a door, is detected as door.
received wrong laser distances, because the laser is
going through the glass.
5 CONCLUSIONS AND FUTURE
WORK
In this paper we presented an approach for a laser-
and camera-based door detection system. By using
the AdaBoost algorithm we built a system with a de-
tection rate of more than 82% and a very low error
rate of 3%. It is a combination of several weak clas-
sifiers, e.g the color of the wall, door knob or door
gap. We used the ROC and RPC methods to demon-
strate that none of the other weak classifiers can re-
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
56
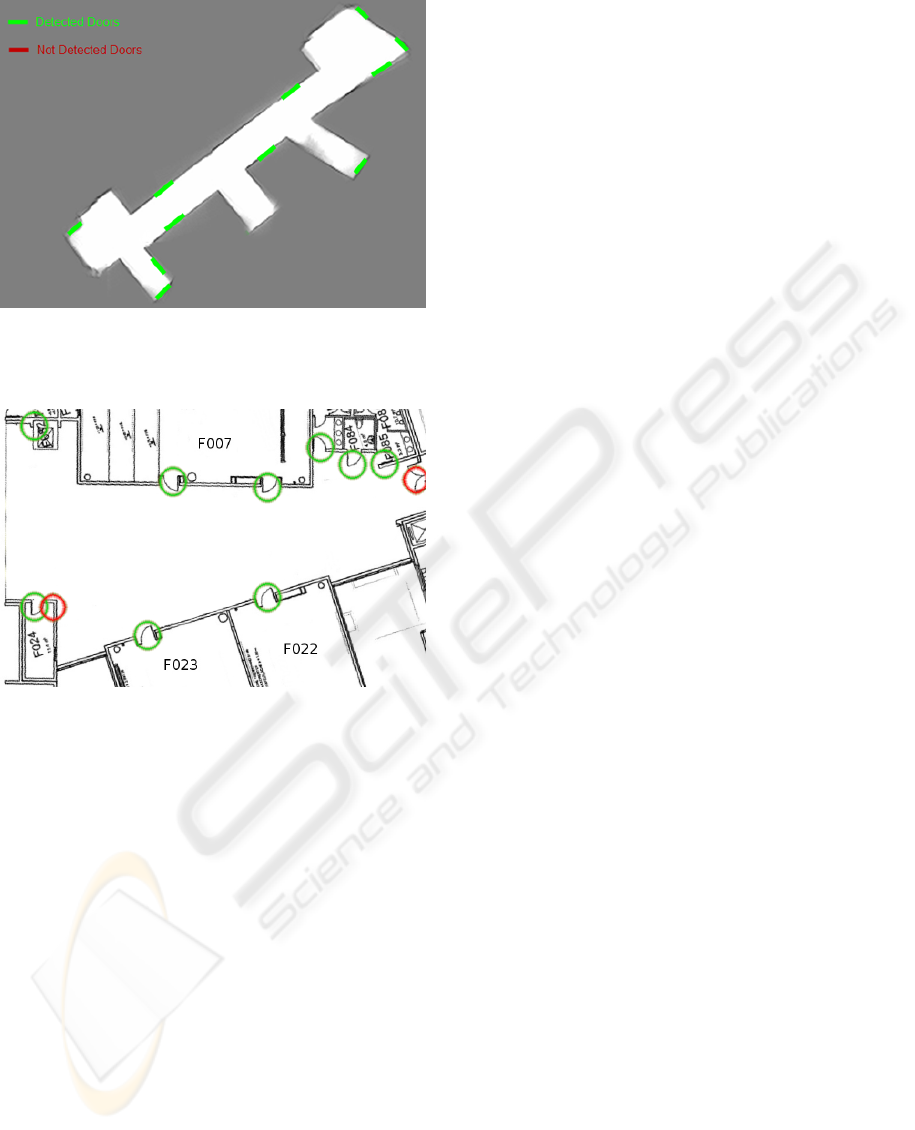
Figure 8: The image depicts the result of the robot first
test run in the basement environment. Detected doors are
marked green in the map. Each door was found.
Figure 9: Results of the second robot test run in the office
environment. All detections are marked with green circles
in the map. The non-detection (glass door) and false detec-
tion (see figure 7) are marked with red circles.
place the strong classifier created by the AdaBoost al-
gorithm. Furthermore it was shown, that without the
laser range finder, we could not reach the same high
detection rate. The system has the ability to find doors
in realtime. With an Intel Core Duo 2.4GHz processor
we reached a performance of 12fps.
There are several possibilities to improve the sys-
tem. Firstly, the training set can be enlarged. More
test data would improve the alpha values for each
weak classifiers. If we use the system in a new envi-
ronment, it will provide a better result, if we add test
data of this environment. Secondly, the weak classi-
fiers can be modified and new weak classifiers can be
added. E.g the ColorWallClassifier can be improved
if the system automatically learns the wall color of
the environment. New classifiers could use the door
hinges or the light switch on the door side.
For future work it would be interesting to integrate
this system in an autonomous map building system.
That means, that the robot has the ability to create
a map of an unknown environment and mark doors
in it. Moreover, the detection of a door plate would
be interesting to navigate the robot better through un-
known environments. In addition, we should look for
new classifiers, which allow to detect open doors.
REFERENCES
Anguelov, D., Koller, D., Parker, E., and Thrun, S. (2004).
Detecting and modeling doors with mobile robots. In
Proceedings of the IEEE International Conference on
Robotics and Automation (ICRA).
Chen, Z. and Birchfield, S. T. (2008). Visual detection
of lintel-occluded doors from a single image. IEEE
Computer Society Workshop on Visual Localization
for Mobile Platforms, 1(1):1–8.
Collett, T. H. J., MacDonald, B. A., and Gerkey, B. (2005).
Player 2.0: Toward a practical robot programming
framework. In Australasian Conference on Robotics
and Automation, Sydney.
Freund, Y. and Schapire, R. E. (1999). A short introduction
to boosting. J. Japan. Soc. for Artif. Intel., 14(5):771–
780.
Murillo, A. C., Ko
ˇ
seck
´
a, J., Guerrero, J. J., and Sag
¨
u
´
es, C.
(2008). Visual door detection integrating appearance
and shape cues. Robot. Auton. Syst., 5(6):512–521.
Neira, J. and Tardos, J. D. (2008). Computer vision. Uni-
versidad de Zaragoza, Spain.
ADABOOST BASED DOOR DETECTION FOR MOBILE ROBOTS
57
