
COMPLEXITY OF STOCHASTIC BRANCH AND BOUND
METHODS FOR BELIEF TREE SEARCH IN BAYESIAN
REINFORCEMENT LEARNING
Christos Dimitrakakis
University of Amsterdam, The Netherlands
Keywords:
Exploration, Bayesian reinforcement learning, Belief tree search, Complexity, PAC bounds.
Abstract:
There has been a lot of recent work on Bayesian methods for reinforcement learning exhibiting near-optimal
online performance. The main obstacle facing such methods is that in most problems of interest, the optimal
solution involves planning in an infinitely large tree. However, it is possible to obtain stochastic lower and
upper bounds on the value of each tree node. This enables us to use stochastic branch and bound algorithms to
search the tree efficiently. This paper proposes some algorithms and examines their complexity in this setting.
1 INTRODUCTION
Various Bayesian methods for exploration in Markov
decision processes (MDPs) and for solving known
partially-observable Markov decision processes
(POMDPs), were proposed previously (c.f. (Poupart
et al., 2006; Duff, 2002; Ross et al., 2008)). How-
ever, such methods often suffer from computational
tractability problems. Optimal Bayesian exploration
requires the creation of an augmented MDP model in
the form of a tree (Duff, 2002), where the root node
is the current belief-state pair and children are all
possible subsequent belief-state pairs. The size of the
belief tree increases exponentially with the horizon,
while the branching factor is infinite in the case of
continuous observations or actions.
In this work, we examine the complexity of ef-
ficient algorithms for expanding the tree. In particu-
lar, we propose and analyse stochastic search methods
similar to the ones proposed in (Bubeck et al., 2008;
Norkin et al., 1998). Related methods have been
previously examined experimentally in the context
of Bayesian reinforcement learning in (Dimitrakakis,
2008; Wang et al., 2005).
The remainder of this section summarises the
Bayesian planning framework. Our main results are
presented in Sect. 2. Section 3 concludes with a dis-
cussion of related work.
1.1 Markov Decision Processes
Reinforcement learning [c.f. (Puterman, 2005)] is
discrete-time sequential decision making problem,
where we wish to act so as to maximise the expected
sum of discounted future rewards E
∑
T
k=1
γ
k
r
t+k
,
where r
t
∈ R is a stochastic reward at time t. We are
only interested in rewards from time t to T > 0, and
γ ∈ [0,1] plays the role of a discount factor. Typically,
we assume that γ and T are known (or have known
prior distribution) and that the sequence of rewards
arises from a Markov decision process µ:
Definition 1 (MDP). A Markov decision process is a
discrete-time stochastic process with: A state s
t
∈ S
at time t and a reward r
t
∈ R, generated by the pro-
cess µ, and an action a
t
∈ A, chosen by the deci-
sion maker. We denote the distribution over next
states s
t+1
, which only depends on s
t
and a
t
, by
µ(s
t+1
|s
t
,a
t
). Furthermore µ(r
t+1
|s
t
,a
t
) is a reward
distribution conditioned on states and actions. Finally,
µ(r
t+1
,s
t+1
|s
t
,a
t
) = µ(r
t+1
|s
t
,a
t
)µ(s
t+1
|s
t
,a
t
).
In the above, and throughout the text, we usu-
ally take µ(·) to mean P
µ
(·), the distribution un-
der the process µ, for compactness. Frequently
such a notation will imply a marginalisation. For
example, we shall write µ(s
t+k
|s
t
,a
t
) to mean
∑
s
t+1
,...,s
t+k−1
µ(s
t+k
,... , s
t+1
|s
t
,a
t
). The decision
maker takes actions according to a policy π, which
259
Dimitrakakis C. (2010).
COMPLEXITY OF STOCHASTIC BRANCH AND BOUND METHODS FOR BELIEF TREE SEARCH IN BAYESIAN REINFORCEMENT LEARNING.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Artificial Intelligence, pages 259-264
DOI: 10.5220/0002721402590264
Copyright
c
SciTePress

defines a distribution π(a
t
|s
t
) over A, conditioned on
the state s
t
. A policy π is stationary if π(a
t
= a|s
t
=
s) = π(a
t
0
= a|s
t
0
= s) for all t,t
0
. The expected util-
ity of a policy π selecting actions in the MDP µ, from
time t to T can be written as the value function:
V
π,µ
t,T
(s) = E
π,µ
T
∑
k=1
γ
k
r
t+k
s
t
!
, (1)
where E
π,µ
denotes the expectation under the Markov
chain arising from acting policy π on the MDP µ.
Whenever it is clear from context, superscripts and
subscripts shall be omitted for brevity. The optimal
value function will be denoted by V
∗
, max
π
V
π
. If
the MDP is known, we can evaluate the optimal value
function policy in time polynomial to the sizes of the
state and action sets (Puterman, 2005) via backwards
induction (value iteration).
1.2 Bayesian Reinforcement Learning
If the MDP is unknown, we may use a Bayesian
framework to represent our uncertainty (Duff, 2002).
This requires maintaining a belief ξ
t
, about which
MDP µ ∈ M corresponds to reality. More precisely,
we define a measurable space (M ,M), where M is a
(usually uncountable) set of MDPs, and M is a suit-
able σ-algebra. With an appropriate initial density
ξ
0
(µ), we can obtain a sequence of densities ξ
t
(µ),
representing our subjective belief at time t, by condi-
tioning ξ
t
(µ) on the latest observations:
ξ
t+1
(µ) ,
µ(r
t+1
,s
t+1
|s
t
,a
t
)ξ
t
(µ)
R
M
µ
0
(r
t+1
,s
t+1
|s
t
,a
t
)ξ
t
(µ
0
)dµ
0
. (2)
In the following, we write E
ξ
to denote expectations
with respect to any belief ξ.
1.3 Belief-augmented MDPs
In order to optimally select actions in this framework,
it is necessary to explicitly take into account future
changes in the belief when planning (Duff, 2002).
The idea is to combine the original MDP’s state s
t
and our belief state ξ
t
into a hyper-state.
Definition 2 (BAMDP). A Belief-Augmented MDP ν
(BAMPD) is an MDP with a set of hyper-states Ω =
S × B, where B is an appropriate set of probability
measures on M and S,A are the state and action sets
of all µ ∈ M . At time t, the agent observes the hyper-
state ω
t
= (s
t
,ξ
t
) ∈ Ω and takes action a
t
∈ A. We
write the transition distribution as ν(ω
t+1
|ω
t
,a
t
) and
the reward distribution as ν(r
t
|ω
t
).
The hyper-state ω
t
has the Markov property. This al-
lows us to treat the BAMDP as an infinite-state MDP
with transitions ν(ω
t+1
|ω
t
,a
t
), and rewards ν(r
t
|ω
t
).
1
When the horizon T is finite, we need only require ex-
pand the tree to depth T − t. Thus, backwards induc-
tion starting from the set of terminal hyper-states Ω
T
and proceeding backwards to T − 1,.. . ,t provides a
solution:
V
∗
n
(ω) = max
a∈A
E
ν
(r|ω) + γ
∑
ω
0
∈Ω
n+1
ν(ω
0
|ω,a)V
∗
n+1
(ω
0
),
(3)
where Ω
n
is the set of hyper-states at time n. We
can approximately solve infinite-horizon problems if
we expand the tree to some finite depth, if we have
bounds on the value of leaf nodes.
1.4 Bounds on the Value Function
We shall relate the optimal value function of the
BAMDP, V
∗
(ω), for some ω(s,ξ), to the value func-
tions V
π
µ
of MDPs µ ∈ M for some π. The opti-
mal policy for µ is denoted as π
∗
(µ). The mean
MDP resulting from belief ξ is denoted as ¯µ
ξ
and
has the properties: ¯µ
ξ
(s
t+1
|s
t
,a
t
) = E
ξ
[µ(s
t+1
|s
t
,a
t
)],
¯µ
ξ
(r
t+1
|s
t
,a
t
) = E
ξ
[µ(r
t+1
|s
t
,a
t
)].
Proposition 1 (Dimitrakakis, 2008). For any ω =
(s,ξ), the BAMDP value function V
∗
obeys:
Z
M
V
π
∗
(µ)
µ
(s)ξ(µ)dµ ≥ V
∗
(ω) ≥
Z
M
V
π
∗
(¯µ
ξ
)
µ
(s)ξ(µ)dµ
(4)
Proof. By definition, V
∗
(ω) ≥V
π
(ω) for all ω, for any
policy π. It is easy to see that the lower bound equals
V
π
∗
(¯µ
ξ
)
(ω), thus proving the right hand side. The up-
per bound follows from the fact that for any function
f , max
x
R
f (x, u) du ≤
R
max
x
f (x, u) du.
If M is not finite, then we cannot calculate the
upper bound of V (ω) in closed form. However,
we can use Monte Carlo sampling: Given a hyper-
state ω = (s,ξ), we draw m MDPs from its belief ξ:
µ
1
,... , µ
m
∼ ξ,
2
estimate the value function for each
µ
k
, ˜v
ω
U,k
,V
π
∗
(µ
k
)
µ
k
(s), and average the samples: ˆv
ω
U,m
,
1
Because of the way that the BAMDP ν is constructed
from beliefs over M , the next reward now depends on the
next state rather than the current state and action.
2
In the discrete case, we sample a multinomial distri-
bution from each of the Dirichlet densities independently
for the transitions. For the rewards we draw independent
Bernoulli distributions from the Beta of each state-action
pair.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
260
1
m
∑
m
k=1
˜v
ω
U,k
. Let v
ω
U
,
R
M
ξ
ω
(µ)V
∗
µ
(s
ω
)dµ. Then,
lim
m→∞
[ ˆv
ω
U,m
] = v
ω
U
almost surely and E[ ˆv
ω
U,m
] = v
ω
.
Lower bounds can be calculated via a similar pro-
cedure. We begin by calculating the optimal policy
π
∗
(¯µ
ξ
) for the mean MDP ¯µ
ξ
arising from ξ. We then
compute ˜v
ω
L,k
, V
π
∗
(¯µ
ξ
)
µ
k
, the value of that policy for
each sample µ
k
and estimate ˆv
ω
L,m
,
1
m
∑
m
k=1
˜v
ω
L,k
.
2 COMPLEXITY OF BELIEF
TREE SEARCH
We now present our main results. Detailed proofs are
available in an accompanying technical report (Dim-
itrakakis, 2009). We search trees which arise in the
context of planning under uncertainty in MDPs us-
ing the BAMDP framework. We can use value func-
tion bounds on the leaf nodes of a partially expanded
BAMDP tree to obtain bounds for the inner nodes
through backwards induction. The bounds can be
used both for action selection and for further tree
expansion. However, the bounds are estimated via
Monte Carlo sampling, something that necessitates
the use of stochastic branch and bound technique to
expand the tree.
We analyse a set of such algorithms. The first is
a search to a fixed depth that employs exact lower
bounds. We then show that if only stochastic bounds
are available, the complexity of fixed depth search
only increases logarithmically. We then present two
stochastic branch and bound algorithms, whose com-
plexity is dependent on the number of near-optimal
branches. The first of these uses bound samples on
leaf nodes only, while the second uses samples ob-
tained in the last half of the parents of leaf nodes, thus
using the collected samples more efficiently.
2.1 Assumptions and Notation
We present the main assumptions concerning the tree
search, pointing out the relations to Bayesian RL. The
symbols V and v have been overloaded to make this
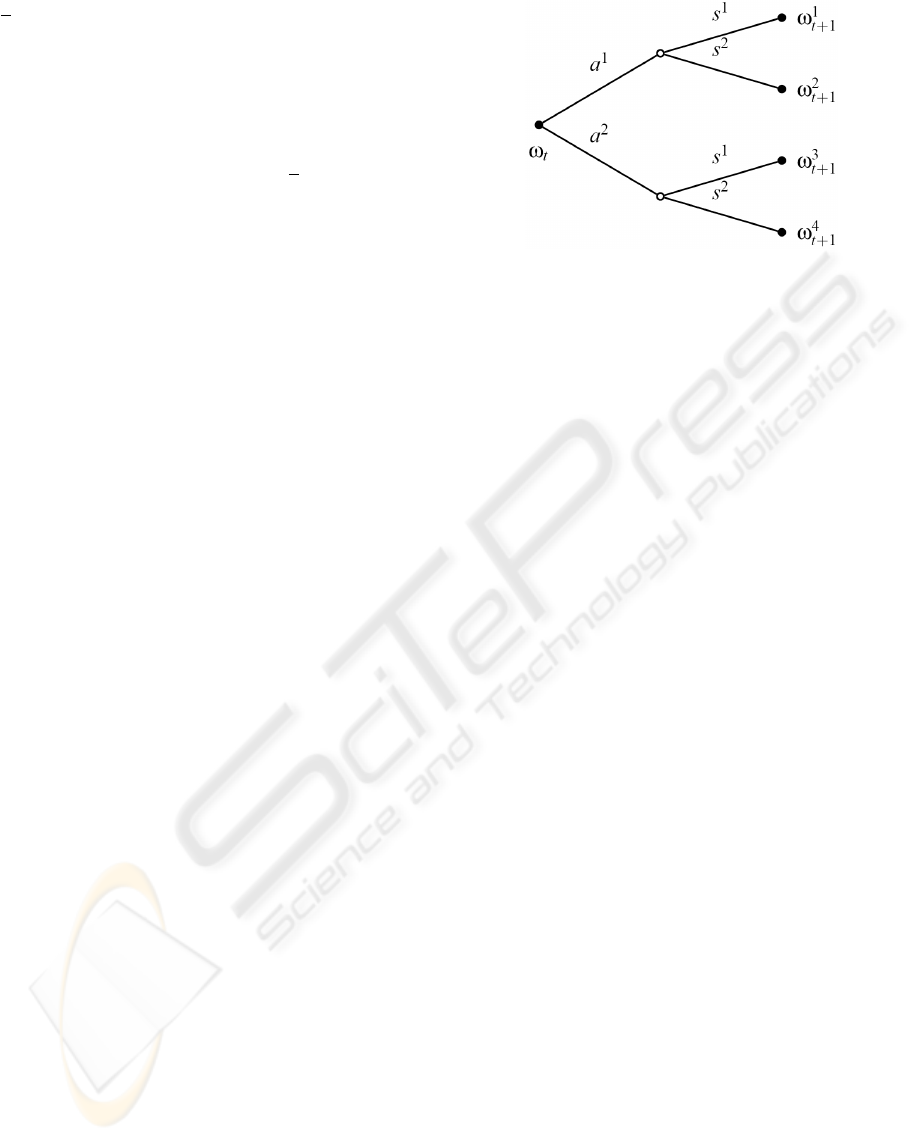
correspondence more apparent. The tree that has a
branching factor at most φ. The branching is due to
both action choices and random outcomes (see Fig.1).
Thus, the nodes at depth k correspond to the set of
hyper-states {ω
t+k
} in the BAMDP. By abusing no-
tation, we may also refer to the components of each
node ω = (s,ξ) as s(ω),ξ(ω).
We define a branch b as a set of policies (i.e. the
set of all policies starting with a particular action).
The value of a branch b is V
b
, max
π∈b
V
π
. The
root branch is the set of all policies, with value V
∗
. A
Figure 1: A belief tree, where the rewards are ignored
for simplicity, with actions A = {a
1
,a
2
} and states S =
{s
1
,s
2
}.
hyper-state ω is b-reachable if ∃π ∈ b s.t P
π,ν
(ω|ω
t
) >
0.Any branch b can be partitioned at any b-reachable
ω into a set of branches B(b,ω). A possible parti-
tion is any b
i
=
{
π ∈ b : i = argmax
a
π(a|ω)
}
for any
b
i
∈ B(b, ω). We simplify this by considering only
deterministic policies. We denote the k-horizon value
function by V
b
(k) , max
π∈b
V
π
t,k
(ω
t
). For each tree
node ω = (s,ξ), we define upper and lower bounds
v
U
(ω) , E
ξ
[V
∗
µ
(s)], v
L
(ω) , E
ξ
[V
π
∗
(¯µ
ξ
)
(s)], from (4).
By fully expanding the tree to depth k and perform-
ing backwards induction (3), using either v
U
or v
L
as
the value of leaf nodes, we obtain respectively upper
and lower bounds V
b
U
(k),V
b
L
(k) on the value of any
branch. Finally, we use C (ω) for the set of immediate
children of a node ω and the short-hand Ω
k
for C
k
(ω),
the set of all children of ω at depth k. We assume the
following:
Assumption 1 (Uniform linear convergence). There
exists γ ∈ (0, 1) and β > 0 s.t. for any branch b, and
depth k, V
b
−V
b
L
(k) ≤ βγ
k
, V
b
U
(k) −V
b
≤ βγ
k
.
Remark 1. For BAMDPs with r
t
∈ [0,1] and γ < 1,
Ass. 1 holds, from boundedness and the geometric se-
ries, with β = 1/(1−γ), since V
b
L
(k) and V
b
U
(k) are the
k-horizon value functions with the value of leaf nodes
bounded in 1/(1 − γ).
We analyse algorithms which search the tree and
then select an (action) branch
ˆ
b
∗
. For each algorithm,
we examine the number of leaf node evaluations re-
quired to bound the regret V
∗
−V
ˆ
b
∗
.
2.2 Flat Search
With exact bounds, we can expand all branches to a
fixed depth and then select the branch
ˆ
b
∗
, with the
highest lower bound. This is Alg. 1, with complexity
given by the following lemma.
COMPLEXITY OF STOCHASTIC BRANCH AND BOUND METHODS FOR BELIEF TREE SEARCH IN BAYESIAN
REINFORCEMENT LEARNING
261
Algorithm 1. Flat oracle search.
1: Expand all branches until depth k = log
γ
ε/β or
ˆ
∆
L
> βγ
k
− ε.
2: Select the root branch
ˆ
b
∗
= argmax
b
V
b
L
(k).
Algorithm 2. Flat stochastic search.
1: procedure FSSEARCH(ω
t
,k, m)
2: Let Ω
k
=
ω
i
t+k
: i = 1,... , φ
k
be the set of
all k-step children of ω
3: for ω ∈ Ω
k
do
4: Draw m samples ˜v
ω
L, j
= V
π
µ
, µ ∼ ξ(ω)
5: ˆv
ω
L
=
1
m
∑
m
j=1
˜v
ω
L, j
,
6: end for
7: Calculate
ˆ
V
b
, return
ˆ
b
∗
= argmax
ˆ
V
b
.
8: end procedure
Lemma 1. Alg. 1 on a tree with branching factor φ,
γ ∈ (0,1), samples O(φ
1+log
γ
ε/β
) times to bound the
regret by ε.
Proof. Bound the k-horizon value function error with
Ass. 1 and note that there are φ
k+1
leaves.
In our case, we only have a stochastic lower bound on
the value of each node. Algorithm 2 expands the tree
to a fixed depth and then takes multiple samples from
each leaf node.
Lemma 2. Calling Alg. 2 with k = dlog
γ
ε/2βe, m =
2dlog
γ
(ε/2β)e · log φ, we bound the regret by ε using
O
φ
1+log
γ
ε/2β
log
γ
(ε/2β) · log φ
samples.
Proof. The regret now is due to both limited depth
and stochasticity. We bound each by ε/2, the first via
Lem. 1 and the second via Hoeffding’s inequality.
Thus, stochasticity mainly adds a logarithmic factor
to the oracle search. We now consider two algo-
rithms which do not search to a fixed depth, but select
branches to deepen adaptively.
2.3 Stochastic Branch and Bound 1
A stochastic branch and bound algorithm similar to
those examined here was originally developed by
(Norkin et al., 1998) for optimisation problems. At
each stage, it takes an additional sample at each leaf
node, to improve their upper bound estimates, then
expands the node with the highest mean upper bound.
Algorithm 3 uses the same basic idea, averaging the
value function samples at every leaf node.
In order to bound complexity, we need to bound
the time required until we discover a nearly optimal
branch. We calculate the number of times a subop-
timal branch is expanded before its suboptimality is
discovered. Similarly, we calculate the number of
times we shall sample the optimal node until its mean
upper bound becomes dominant. These two results
cover the time spent sampling upper bounds of nodes
in the optimal branch without expanding them and the
time spent expanding nodes in a sub-optimal branch.
Algorithm 3. Stochastic branch and bound 1.
Let L
0
be the root.
for n = 1,2,. .. do
for ω ∈ L
n
do
m
ω
++, µ ∼ ξ(ω), ˜v
ω
m
ω
= V
∗
µ
(s(ω)).
ˆv
ω
U
=
1
m
ω
∑
m
ω
i=1
˜v
ω
i
end for
ˆ
ω
∗
n
= argmax
ω
ˆv
ω
U
.
L
n+1
= C (
ˆ
ω
∗
n
) ∪ L
n
\
ˆ
ω
∗
n
end for
Lemma 3. If N is the (random) number of samples ˜v
i
from random variable V ∈ [0,β] we must take until its
empirical mean
ˆ
V
k
,
∑
k
i=1
˜v
i
> EV − ∆, then:
E[N] ≤ 1 + β
2
∆
−2
(5)
P[N > n] ≤ exp
−2β
−2
n
2
∆
2
. (6)
Proof. The first inequality follows from the Hoeffding
inequality and an integral bound on the resulting sum,
while the second inequality is proven directly via a
Hoeffding bound.
By setting ∆ to be the difference between the opti-
mal and second optimal branch, we can use the above
lemma to bound the number of times N the leaf nodes
in the optimal branch will be sampled without be-
ing expanded. The converse problem is bounding the
number of times that a suboptimal branch will be ex-
panded.
Lemma 4. If b is a branch with V
b
= V
∗
− ∆, then
it will be expanded at least to depth k
0
= log
γ
∆/β.
Subsequently,
P(K > k) < O
exp
−2β
−2
(k − k
0
)∆
2
. (7)
Proof. In the worst case, the branch is degenerate and
only one leaf has non-zero probability. We then apply
a Hoeffding bound to obtain the desired result.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
262
Algorithm 4. Stochastic branch and bound 2.
for ω ∈ L
n
do
ˆ
V
ω
U
=
1
∑
ω
0
∈C (ω)
m
ω
0
∑
ω
0
∈C (ω)
∑
m
0
ω
i=1
˜v
ω
0
i
end for
Use (3) to obtain
ˆ
V
U
for all nodes.
Set ω
0
to root.
for d = 1,... do
a
∗
d
= argmax
a
∑
ω∈Ω
d
ω
d−1
( j|a)
ˆ
V
U
(ω)
ω
d
∼ ω
d−1
( j|a
∗
d
).
if ω
d
∈ L
n
then,
L
n+1
= C (ω
d
) ∪ L
n
\ω
d
Break
end if
end for
2.4 Stochastic Branch and Bound 2
The degeneracy is the main problem of Alg. 3. Alg. 4
not only propagates upper bounds from multiple leaf
nodes to the root, but also re-uses upper bound sam-
ples from inner nodes, in order to handle the degener-
ate case where only one path has non-zero probability.
(Nevertheless, Lemma 3 applies without modification
to Alg. 4). Because we are no longer operating on
leaf nodes, we can take advantage of the upper bound
samples collected along a given trajectory. However,
if we use all of the upper bounds along a branch, then
the early samples may bias our estimates a lot. For
this reason, if a leaf is at depth k, we only average
the upper bounds along the branch to depth k/2. The
complexity of this approach is given by the following
lemma:
Lemma 5. If b is s.t. V
b
= V
∗
−∆, it will be expanded
to depth k
0
> log
γ
∆/β and
P(K > k) / exp
−2(k − k
0
)
2
(1 − γ
2
)
, k > k
0
Proof. There is a degenerate case where only one sub-
branch has non-zero probability. However we now
re-use the samples that were obtained at previous ex-
pansions, thus allowing us to upper bound the bias
by
∆(1−γ
k+1
)
(k−k
0
)(1−γ)
. This allows to use a tighter Hoeffding
bound and so obtain the desired outcome.
This bound decreases faster with k. Furthermore,
there is no dependence on ∆ after the initial transi-
tory period, which may however be very long. The
gain is due to the fact that we are re-using the upper
bounds previously obtained in inner nodes. Thus, this
algorithm should be particularly suitable for stochas-
tic problems.
2.5 Lower Bounds for Bayesian RL
We can reduce the branching factor φ, (which
is |A × S × R | for a full search) by employing
sparse sampling methods (Kearns et al., 1999) to
O{|A| exp[1/(1 − γ)]}. This was essentially the ap-
proach employed by (Wang et al., 2005). However,
our main focus here is to reduce the depth to which
each branch is searched.
The main problem with the above algorithms is
the fact that we must reach k
0
= dlog
γ
∆e to discard
∆-optimal branches. However, since the hyper-state
ω
t
arises from a Bayesian belief, we can use an addi-
tional smoothness property:
Lemma 6. The Dirichlet parameter sequence ψ
t
/n
t
,
with n
t
,
∑
K
i=1
ψ
i
t
, is a c-Lipschitz martingale with
c
t
= 1/2(n
t
+ 1).
Proof. Simple calculations show that, no matter what
is observed, E
ξ
t
(ψ
t+1
/n
t+1
) = ψ
t
/n
t
. Then, we
bound the difference |ψ
t+k
/n
t+k
− ψ
t
/n
t
| by two dif-
ferent bounds, which we equate to obtain c
t
.
Lemma 7. If µ, ˆµ are such that kT −
ˆ
T k
∞
≤ ε and
kr − ˆrk
∞
≤ ε, for some ε > 0, then
V
π
−
ˆ
V
π
∞
≤
ε
(1−γ)
2
, for any policy π.
Proof. By subtracting the Bellman equations for
V,
ˆ
V and taking the norm, we can repeatedly apply
Cauchy-Schwarz and triangle inequalities to obtain
the desired result.
The above results help us obtain better lower bounds
in two ways. First we note that initially 1/k converges
faster than γ
k
, for large γ, thus we should be able to
expand less deeply. Later, n
t
is large so we can sample
even more sparely.
If we search to depth k, and the rewards are in
[0,1], then, naively, our error is bounded by
∑
∞
n=k
γ
n
=
γ
k
/(1 − γ). However, the mean MDPs for n > k are
close to the mean MDP at k due to Lem. 6. This means
that β can be significantly smaller than 1/(1 − γ). In
fact, the total error is bounded by
∑
∞
n=k
γ
n
(n − k)/n.
For undiscounted problems, our error is bounded by
T − k in the original case and by T − k[1 + log(T /k)]
when taking into account the smoothness.
3 CONCLUSIONS AND RELATED
WORK
Much recent work on Bayesian RL focused on my-
opic estimates or full expansion of the belief tree
COMPLEXITY OF STOCHASTIC BRANCH AND BOUND METHODS FOR BELIEF TREE SEARCH IN BAYESIAN
REINFORCEMENT LEARNING
263

up to a certain depth. Exceptions include (Poupart
et al., 2006), which uses an analytical bound based
on sampling a small set of beliefs and (Wang et al.,
2005), which uses Kearn’s sparse sampling algo-
rithm (Kearns et al., 1999) to expand the tree. Both
methods have complexity exponential in the horizon,
something which we improve via the use of smooth-
ness properties induced by the Bayesian updating.
There are also connections with work on
POMDPs problems (Ross et al., 2008). However
this setting, though equivalent in an abstract sense,
is not sufficiently close to the one we consider. Re-
sults on bandit problems, employing the same value
function bounds used herein were reported in (Dim-
itrakakis, 2008), which experimentally compared al-
gorithms operating on leaf nodes only.
Related results on the online sample complexity
of Bayesian RL were developed by (Kolter and Ng,
2009), who employs a different upper bound to ours
and (Asmuth et al., 2009), who employs MDP sam-
ples to plan in an augmented MDP space, similarly to
(Auer et al., 2008) (who consider the set of plausible
MDPs) and uses Bayesian concentration of measure
results (Zhang, 2006) to prove mistake bounds on the
online performance of the algorithm.
Interestingly, Alg. 4 resembles HOO (Bubeck
et al., 2008) in the way that it traverses the tree, with
two major differences. (a) The search is adapted to
stochastic trees. (b) We use means of samples of
upper bounds, rather than upper bounds on sample
means. For these reasons, we are unable to simply
restate the arguments in (Bubeck et al., 2008).
We presented complexity results and counting ar-
guments for a number of tree search algorithms on
trees where stochastic upper and lower bounds sat-
isfying a smoothness property exist. These are the
first results of this type and partially extend the re-
sults of (Norkin et al., 1998), which provided an
asymptotic convergence proof, under similar smooth-
ness conditions, for a stochastic branch and bound al-
gorithm. In addition, we introduce a mechanism to
utilise samples obtained at inner nodes when calcu-
lating mean upper bounds at leaf nodes. Finally, we
relate our complexity results to those of (Kearns et al.,
1999), for whose lower bound we provide a small
improvement. We plan to address the online sam-
ple complexity of the proposed algorithms, as well as
their practical performance, in future work.
ACKNOWLEDGEMENTS
This work was part of the ICIS project, supported
by the Dutch Ministry of Economic Affairs, grant nr:
BSIK03024. I would like to thank the anonymous re-
viewers, as well as colleagues at the university of Am-
sterdam, Leoben and TU Crete for their comments on
earlier versions of this paper.
REFERENCES
Asmuth, J., Li, L., Littman, M. L., Nouri, A., and Wingate,
D. (2009). A Bayesian sampling approach to explo-
ration in reinforcement learning. In UAI 2009.
Auer, P., Jaksch, T., and Ortner, R. (2008). Near-optimal
regret bounds for reinforcement learning. In Proceed-
ings of NIPS 2008.
Bubeck, S., Munos, R., Stoltz, G., and Szepesv
´
ari, C.
(2008). Online optimization in X-armed bandits. In
NIPS, pages 201–208.
Dimitrakakis, C. (2008). Tree exploration for Bayesian RL
exploration. In CIMCA’08, pages 1029–1034, Los
Alamitos, CA, USA. IEEE Computer Society.
Dimitrakakis, C. (2009). Complexity of stochastic branch
and bound for belief tree search in Bayesian rein-
forcement learning. Technical Report IAS-UVA-09-
01, University of Amsterdam.
Duff, M. O. (2002). Optimal Learning Computational
Procedures for Bayes-adaptive Markov Decision Pro-
cesses. PhD thesis, University of Massachusetts at
Amherst.
Kearns, M. J., Mansour, Y., and Ng, A. Y. (1999). A sparse
sampling algorithm for near-optimal planning in large
Markov decision processes. In Dean, T., editor, IJCAI,
pages 1324–1231. Morgan Kaufmann.
Kolter, J. Z. and Ng, A. Y. (2009). Near-Bayesian explo-
ration in polynomial time. In ICML 2009.
Norkin, V. I., Pflug, G. C., and Ruszczyski, A. (1998). A
branch and bound method for stochastic global op-
timization. Mathematical Programming, 83(1):425–
450.
Poupart, P., Vlassis, N., Hoey, J., and Regan, K. (2006). An
analytic solution to discrete Bayesian reinforcement
learning. In ICML 2006, pages 697–704. ACM Press
New York, NY, USA.
Puterman, M. L. (1994,2005). Markov Decision Processes
: Discrete Stochastic Dynamic Programming. John
Wiley & Sons, New Jersey, US.
Ross, S., Pineau, J., Paquet, S., and Chaib-draa, B. (2008).
Online planning algorithms for POMDPs. Journal of
Artificial Intelligence Resesarch, 32:663–704.
Wang, T., Lizotte, D., Bowling, M., and Schuurmans, D.
(2005). Bayesian sparse sampling for on-line reward
optimization. In ICML ’05, pages 956–963, New
York, NY, USA. ACM.
Zhang, T. (2006). From ε-entropy to KL-entropy: Analysis
of minimum information complexity density estima-
tion. Annals of Statistics, 34(5):2180–2210.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
264
