
SCHEDULING SOLUTION FOR GRID META-BROKERING
USING THE PLIANT SYSTEM
J´ozsef D´aniel Dombi
Institute of Informatics, University of Szeged,
´
Arp´ad t´er 2., Szeged, Hungary
Attila Kert´esz
MTA SZTAKI, 1518 Budapest, P.O. Box 63, Hungary
Keywords:
Pliant system, Sigmoid function, Grid computing, Meta-Brokering.
Abstract:
In this paper we present some advanced scheduling techniques with a weighted fitness function for an adaptive
Meta-Brokering Grid Service using the Pliant system, which enables a higher level utilization of the existing
grid brokers. We construct and demonstrate the efficiency of our new algorithms in a grid simulation envi-
ronment. The results given here demonstrate that the proposed novel scheduling technique produces better
performance scores.
1 INTRODUCTION
In 1998, a new computing infrastructure called the
Grid was born when the bible for the Grid (Kesselman
and Foster, 1998) was published by Ian Foster et. al.
Since then, Grid Computing has become an indepen-
dent field of research; current Grid Systems are in-
tented for numerous worldwide projects, and produc-
tion Grids serve various user communities all around
the world. The emerging Web technologies have in-
fluenced Grid development, and the latest solutions
from related research fields (e.g. autonomous com-
puting, artificial intelligence and peer-to-peer tech-
nologies) also need to be taken into account in order
to achieve better resource utilization and successfully
transform the currently separate production Grids to
the future Internet of Services (Report, 2006).
As the management and advantageous utilization
of highly dynamic, complex grid resources cannot
be handled by the users themselves, various grid re-
source management tools have been developed and
support different Grids. User requirements created
certain properties that resource managers now pro-
vide. This development is continuing, and users still
find it hard to distinguish brokers and to migrate their
applications when they move to a different grid sys-
tem. Scheduling in diverse and distributed environ-
ments requires sophisticated approaches because a
high uncertainty is present at several stages of a Grid
environment. The main contribution of this paper
lies in an enhanced scheduling solution based on the
Pliant System (Dombi, 1997) that is applied to the
resource management layer of grid middleware sys-
tems.
The Pliant system is very similar to a fuzzy sys-
tem (Dombi, 1982). The difference between the two
systems lies in the choice of operators. In fuzzy the-
ory the membership function plays an important role,
although the exact definition of this function is often
not clear. In Pliant systems we use a so-called dis-
tending function, which represents a soft inequality.
In the Pliant system the various operators (conjunc-
tion, disjunction and aggregation) are closely related
to each other. We also use unary operators (negation
and modifiers), which are also related to the Pliant
system. In consequence, the Pliant system involves
only those operators whose relationship is clearly de-
fined and the whole system is based on these identi-
ties.
In the next section we shall introduce the Pliant
system, operators and functions. In Section 3 we will
describe meta-brokering in Grids, while in Section 4
we discuss algorithms of an adaptive scheduling tech-
nique that seek to provide better scheduling in global
Grids. Section 5 describes an evaluation of our pro-
posed solution and finally, in the last section we will
46
Dániel Dombi J. and Kertész A. (2010).
SCHEDULING SOLUTION FOR GRID META-BROKERING USING THE PLIANT SYSTEM.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Agents, pages 46-53
DOI: 10.5220/0002728500460053
Copyright
c
SciTePress
briefly summarize our results and draw some relevant
conclusions.
2 COMPONENTS OF THE
PLIANT SYSTEM
In fuzzy logic theory (Dombi, 1982) the membership
function plays an important role. In pliant logic we
introduce a distending function with a soft inequality.
The Pliant system is a strict, monotonously increasing
t-norm and t-conorm, and the following expression is
valid for the generator function:
f
c
(x) f
d
(x) = 1, (1)
where f
c
(x) and f
d
(x) are the generator functions
of the conjunctive and disjunctive logical operators.
Here we use the representation theorem of the asso-
ciative equation (Aczl, 1966):
f
c
(x
1
, x
2
, · · · , x
n
) = f
−1
c
n
∑
i=1
f
c
(x
i
)
!
(2)
The generator function could be the Dombi oper-
ator (Dombi, 1982):
f(x) =
1− x
x
, f
−1
(x) =
1
1+ x
(3)
Besides the above-mentioned logical operators in
fuzzy theory, there is also another non-logical opera-
tor. The reason for this that for real world applications
it is not enough to use just conjunctive or disjunction
operators (Zimmermann, 1991). The rational form of
an aggregation operator is:
a
ν,ν
0
(x
1
, · · · , x
n
) =
1
1+
1−ν
0
ν
0
ν
1−ν
∏
n
i=1
1−x
i
x
i
, (4)
where ν is the neutral value and ν
0
is the threshold
value of the corresponding negation.
The general form of the distending function is the
following:
δ
(λ)
a
(x) = f
−1
e
−λ(x−a)
, λ ∈ R, a ∈ R (5)
Here f is the generator function of the logical con-
nectives, λ is responsible for the sharpness and a de-
notes the threshold value. The semantic meaning of
δ
(λ)
a
is
truth(a <
λ
x) = δ
(λ)
a
(x) (6)
Important properties of the distending function
are:
1. In the Pliant system f could be the generator func-
tion of the conjunctive operator or the disjunctive
operator. The form of δ
(λ)
a
(x) is the same in both
cases.
2. In the Pliant concept the operators and member-
ship are closely related.
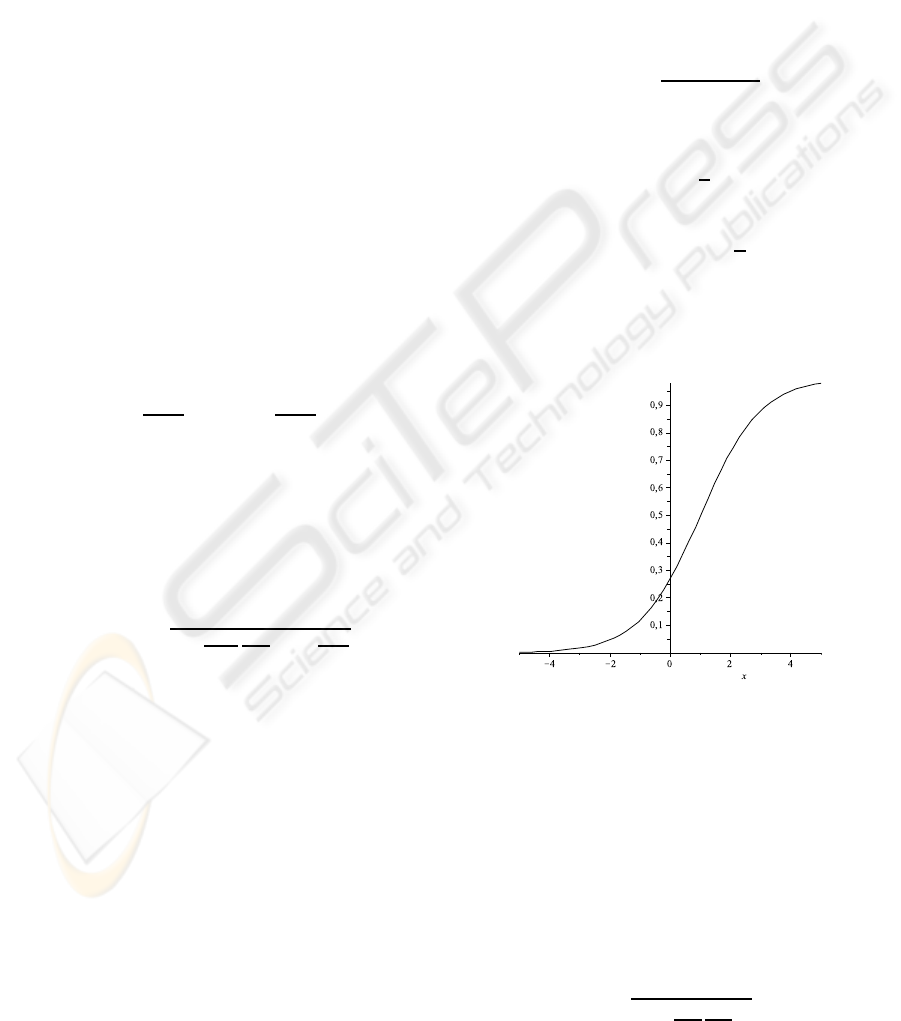
2.1 Sigmoid Function
In the Dombi operator case, the distending function is
the sigmoid function (see Figure 1):
σ
(λ)
a
(x) =
1
1+ e
−λ(x−a)
(7)
Here, it is clear that:
1.
σ
(λ)
a
(a) =
1
2
= ν
0
(8)
2.
σ
(λ)
a
(a)
′
=
λ
4
(9)
3.
σ
(−λ)
a
(x) = n(σ
(λ)
a
(x)) if n(x) = 1− x. (10)
Figure 1: Sigmoid function.
The sigmoid function naturally maps the values to
the (0,1) interval.
2.2 Kappa function
In order to make a decision we need to define a unary
transformation for the values produced by the pliant
operator. Using pliant logic, the general form of the
modification operators is:
κ
λ
ν
=
1
1+
ν
1−ν
1−x
x
λ
(11)
SCHEDULING SOLUTION FOR GRID META-BROKERING USING THE PLIANT SYSTEM
47
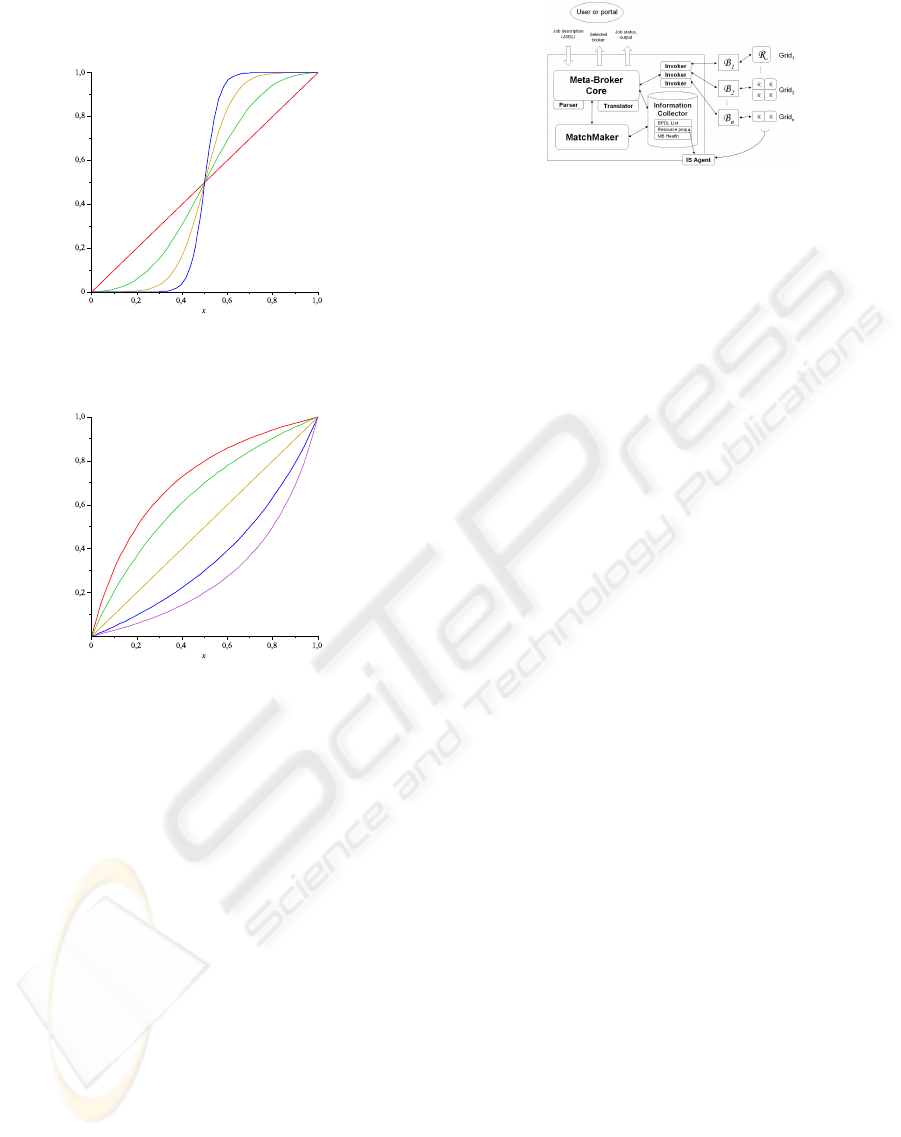
The behaviour of this function for different values
of ν nand λ can be seen in figures 2 and 3.
Figure 2: Modification operator with the parameter values
ν = 0.5, λ = 1, 2, 4, 8.
Figure 3: Modification operator with the parameter values
λ = 1, ν = 0.1, 0.3, 0.5,0.7, 0.8.
3 META-BROKERING IN GRID
SYSTEMS
Meta-brokering refers to a higher level of resource
management, which utilizes an existing resource or
service brokers to access various resources. In some
generalized way, it acts as a mediator between users or
higher level tools and environment-specific resource
managers. The main tasks of this component are:
to gather static and dynamic broker properties, and
to schedule user requests to lower level brokers, i.e.
match job descriptions to broker properties. Finally
the job needs to be forwarded to the selected broker.
Figure 4 provides a schematic diagram of the
Meta-Broker (MB) architecture (Kertesz and Kacsuk,
2008), including the components needed to fulfil the
above-mentioned tasks. Different brokers use differ-
ent service or resource specification descriptions to
understand the user request. These documents need to
be written by the users to specify the different kinds of
Figure 4: Components of the Meta-Broker.
service-related requirements. For the resource utiliza-
tion in Grids, OGF (ogf, 1999) developed a resource
specification language standard called JSDL (An-
jomshoaa et al., 2005). As JSDL is general enough
to describe the jobs and services of different grids and
brokers, this is the default description format of MB.
The Translator component of the Meta-Broker is re-
sponsible for translating the resource specification de-
fined by the user to the language of the appropriate
resource broker that MB selects to use for a given re-
quest. These brokers have various features for sup-
porting different user needs, hence an extendable Bro-
ker Property Description Language (BPDL) (Kertesz
and Kacsuk, 2008) is required to express metadata
about brokers and the services they provide. The
Information Collector (IC) component of MB stores
data about the accessible brokers and historical data
about previous submissions. This information tells us
whether the chosen broker is available, and/or how
reliable its services are. During broker utilization the
successful submissions and failures are tracked, and
for these events a ranking is updated for each special
attribute in the BPDL of the appropriate broker (these
attributes are listed above). In this way, the BPDL
documents represent and store the dynamic states of
the brokers. In order to support load balancing, there
is an IS Agent (IS stands for Information System) re-
porting to the IC, which regularly checks the load of
the underlying resources of each linked broker, and
stores this data. The matchmaking process consists
of the following steps: The MatchMaker (MM) com-
pares the received descriptions to the BPDL of the
registered brokers. This selection determines a group
of brokers that can provide the required service. Oth-
erwise, the request is rejected. In the second phase the
MM counts a rank for each of the remaining brokers.
This rank is calculated from the broker properties that
the IS Agent updates regularly, and from the service
completion rate that is updated in the BPDL for each
broker. When all the ranks have been counted, the list
of the brokers is ordered by these ranks. Finally the
first broker of the priority list is selected, and the In-
voker component forwards the request to the broker.
Regarding related works, other approaches try
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
48

to define common protocols and interfaces among
scheduler instances enabling inter-grid usage. The
meta-scheduling project in LA Grid (Rodero, 2008)
aims to support grid applications with resources lo-
cated and managed in different domains. They de-
fine broker instances with a set of functional mod-
ules. Each broker instance collects resource infor-
mation from its neighbors and saves the informa-
tion in its resource repository. The resource infor-
mation is distributed in the different grid domains
and each instance will have a view of all resources.
The Koala grid scheduler (Iosup et al., 2007) was
designed to work on DAS-2 interacting with Globus
middleware services with the main features of data
and processor co-allocation; lately it is being ex-
tended to support DAS-3 and Grid’5000. Their pol-
icy is to use a remote grid only if the local one is
saturated. They use a so-called delegated matchmak-
ing (DMM), where Koala instances delegate resource
information in a peer-to-peer manner. Gridway in-
troduces a Scheduling Architectures Taxonomy (Leal
et al., 2009). Its Multiple Meta-Scheduler Layers
use Gridway instances to communicate and interact
through grid gateways. These instances can access
resources belonging to different administrative do-
mains. They also pass user requests to another do-
main, when the current one is overloaded. Comparing
these related approaches, we can state that all of them
use a new method to expand current grid resource
management boundaries. Meta-brokering appears in
a sense that different domains are being examined as
a whole, but they rather delegate resource informa-
tion among domains, broker instances or gateways
through their own, implementation-dependent inter-
faces. Their scheduling policies focus on resource
selection by usually aggregated resource information
sharing, while our approach targets broker selection
based on broker properties and performances.
4 SCHEDULING ALGORITHMS
In the previous sections we introduced the Pliant Sys-
tem and Grid Meta-Broker, and showed how the de-
fault matchmaking process is carried out. The main
contribution of this paper is to enhance the schedul-
ing part of this matchmaking process. To achieve
this, we created a Decision Maker component based
on functions of the Pliant system, and inserted it into
the MatchMaker component of the Meta-Broker. The
first part of the matchmaking is unchanged: the list
of the available brokers is filtered according to the re-
quirements of the actual job read from its JSDL. Then
a list of the remaining brokers along with their perfor-
mance data and the background grid load are sent to
the Decision Maker in order to determine the most
suitable broker for the actual job. The scheduling
techniques and the scheduling process are described
below.
The Decision Maker uses a random number gen-
erator, and we chose a JAVA solution that generates
pseudorandom numbers. The JAVA random generator
class uses a uniform distribution and 48-bit seed and
the latter is modified by a linear congruential formula
(Knuth, 1997). We also developed a unique random
number generator which generates random numbers
with a given distribution. We call this algorithm the
generator function. In our case we defined a score
value for each broker, and we created the distribution
based on the score value. For example, the broker
which has the highest score number has the biggest
chance of being chosen.
To improve the scheduling performance of the
Meta-Broker we need to send the job to the broker
that best fits the requirements, and executes the job
without failures with the shortest execution time. Ev-
ery broker has four properties that the algorithm can
rely on: a success counter, a failure counter, a load
counter and the running jobs counter.
• The success counter gives the number of jobs
which had finished without any errors.
• The failure counter shows the number of failed
jobs.
• The load counter indicates the actual load of the
grid behind the broker (in percentage terms).
• The running jobs counter shows the number of
jobs sent to the broker which havenot yet finished.
We developed two different kinds of decision al-
gorithms that take into account the above-mentioned
broker properties. These algorithms define a score
number for each broker and use the generator func-
tion to select a broker. Both algorithms use the kappa
function to determine the broker’s score number.
Because the Pliant system is defined in the [0, 1]
interval, we need to normalize the input value. The
two algorithms differ only in this step:
1. The first algorithm uses a linear transformation
called Decision4.
2. The second algorithm uses the Sigmoid function
to normalize the input values, which is called De-
cision5.
It is also important to emphasize that the closer
the value is to one, the better the broker is, and if the
value is close to zero, it means that the broker is not
good. For example if the failure counter is high, both
normalization algorithms should give a value close to
SCHEDULING SOLUTION FOR GRID META-BROKERING USING THE PLIANT SYSTEM
49
zero because it is not a good thing if the broker has
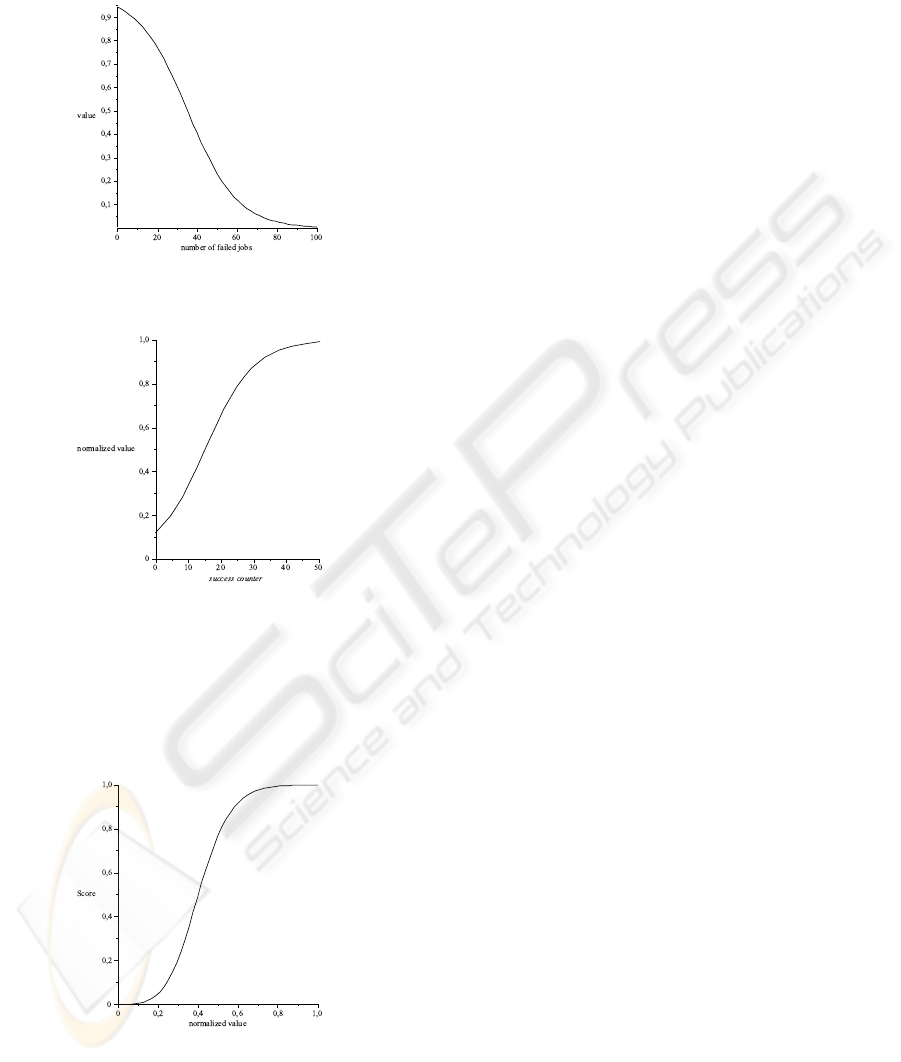
a lot of failed jobs (see in Figure 5). The opposite of
this case is true for the success counter (see Figure 6).
Figure 5: Normalizing the failed jobs counter using Sig-
moid function.
Figure 6: Normalizing the success counter using the Sig-
moid function.
In the next step we can modify the normalized
property value by using the same Kappa function (see
Figure 7). We can also define the expected value of
the normalization via the ν and λ parameters.
Figure 7: Normalized parameter values using the Kappa
function.
To calculate the score value, we can make use of
the conjunctive or aggregation operator. After run-
ning some tests we found that we get better results if
we use the aggregation operator. In this step the result
is always a real number lying in the [0, 1] interval and
then we multiply it by 100 to get the broker’s score
number.
When the Meta-Broker is running, the first two
broker properties (the success and failure counters)
are incremented via a feedback method that the simu-
lator (or a user or portal in real world cases) calls after
the job has finished. The third and fourth properties,
the load value and the running jobs, are handled by
the IS Agent of the Meta-Broker, queried from an in-
formation provider (Information System) of a Grid.
During a simulation this data is saved to a database
by the Broker entities of the simulator (described later
and shown in Figure 8). This means that by the time
we start the evaluation and before we receive feed-
back from finished jobs, the algorithms can only rely
on the background load and running processes of the
grids. To further enhance the scheduling we devel-
oped a training process that can be executed before
the simulation in order to initialize the first and sec-
ond properties. This process sends a small number of
jobs with various properties to the brokers and sets the
successful and failed jobs number at the BPDLs of the
brokers. With this additional training method, we can
expect shorter execution times because we will select
more reliable brokers.
5 RESULTS
5.1 Evaluation
In order to evaluate our proposed scheduling solution,
we created a general grid simulation environment,
where all the related grid resource management en-
tities could be simulated and coordinated. The Grid-
Sim toolkit (Buyya et al., 2002) is a fully extendable,
widely used and accepted grid simulation tool. These
are the main reasons why we chose this toolkit for
our simulations. It can be used for evaluating VO-
based resource allocation, workflow scheduling, and
dynamic resource provisioning techniques in global
grids. It supports the modeling and simulation of het-
erogeneous grid resources, users, applications, bro-
kers and schedulers in a grid computing environment.
It provides primitives for the creation of jobs (called
gridlets), the mapping of these jobs to resources, and
their management, thus resource schedulers can be
simulated to study scheduling algorithms. GridSim
provides a multilayered design architecture based on
SimJava (Howell and Mcnab, 1998), a general pur-
pose discrete-event simulation package implemented
in Java. It is used for handling the interactions or
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
50
events among GridSim components. Each component
in GridSim communicates with another via message
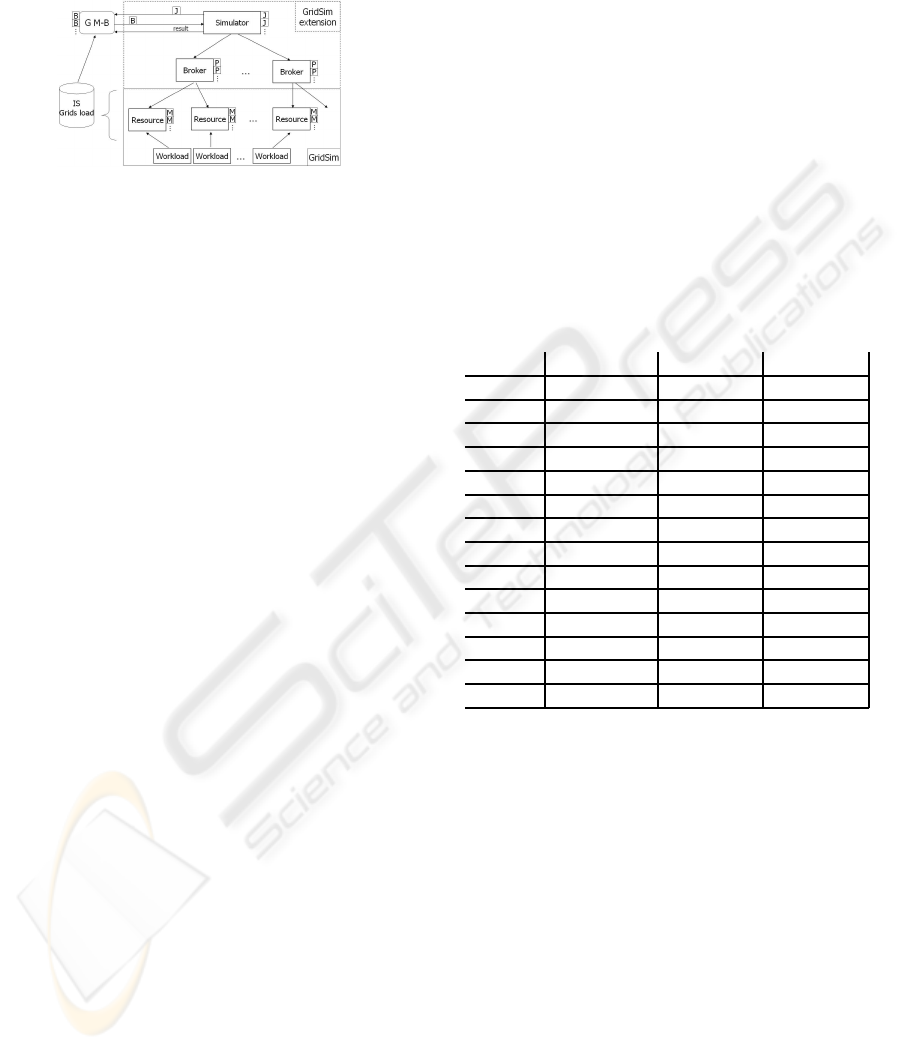
passing operations defined by SimJava.
Figure 8: Meta-Brokering simulation environment based on
GridSim.
Our general simulation architecture is shown in
Figure 8. In the bottom right hand corner we can
see the GridSim components used to simulate the grid
system. The resources can be defined with differ-
ent grid-types. These resources consist of more ma-
chines, for which workloads can be set. On top of this
simulated grid infrastructure we can set up brokers.
The Broker and Simulator entities were developed by
us in order to simulate the meta-brokering process.
Brokers are extended GridUser entities. Here
• they can be connected to one or more resources;
• different properties can be assigned to these bro-
kers (agreement handling, co-allocation, advance
reservation, etc.);
• some properties may be marked as unreliable;
• various scheduling policies can be defined (pre-
defined ones: rnd – random resource selection,
fcpu – resources having more free cpu time or
fewer waiting jobs are selected, nfailed – re-
sources having fewer machine failures are se-
lected);
• in general resubmission is used when a job fails
due to resource failure;
• after they report to the IS Grid load database
by calling the feedback method of the Meta-
Broker with the results of the job submissions
(this database has a similar purpose to that of a
grid Information System).
The Simulator is an extended GridSim entity.
Hence
• it can generate a requested number of gridlets
(jobs) with different properties, start and run times
(length);
• it is connected to the created brokers and is able
to submit jobs to them;
• the default job distribution is the random broker
selection (where the middleware types should be
taken into account);
• in the case of a job failure a different broker is
selected for the actual job;
• it is also connected to the Grid Meta-Broker
through its Web service interface and is able to
call its matchmaking service for broker selection.
5.2 Evaluation Environment
Table 1 shows the evaluation environment used in our
evaluation. The simulation setup was derived from
real-life production grids: current grids and brokers
support only a few special properties: here we used
four. To determine the number of resources in our
Table 1: Evaluation environment setup.
Broker Scheduling Properties Resources
1. fcpu A 6
2. fcpu A
F
8
3. fcpu A 12
4. fcpu B 10
5. fcpu B
F
10
6. fcpu B 12
7. fcpu B
F
12
8. fcpu C 4
9. fcpu C 4
10. fcpu A
F
D 8
11. fcpu AD 10
12. fcpu AD
F
8
13. fcpu AB
F
6
14. fcpu ABC
F
10
simulated grids we compared the sizes of current pro-
duction grids (EGEE VOs, DAS3, NGS, Grid5000,
OSG, etc.). In the evaluation we utilized 14 brokers.
We submitted 1000 jobs to the system, and measured
the makespan of all the jobs. Out of the 1000 jobs
100 had no special properties, while for the rest of
the jobs four key properties were distributed in the
following way: 300 jobs had property A, 300 had B,
200 had C and 100 had D. The second column above
denotes the scheduling policies used by the brokers:
fcpu means the jobs are scheduled to the resource with
the highest free cpu time. The third column shows the
capabilities/properties (like coallocation, checkpoint-
ing) of the brokers: here we used A, B, C and D in
the simulations. The F subscript means unreliability,
a broker having the kind of property that may fail to
execute a job with the requested service with a prob-
ablity of 0.5. The fourth column contains the number
of resources utilized by a broker. As a background
SCHEDULING SOLUTION FOR GRID META-BROKERING USING THE PLIANT SYSTEM
51
workload, 50 jobs were submitted to each resource
by the simulation workload entities during the eval-
uation timeframe. The SDSC BLUE workload logs
were used for this purpose, taken from the Parallel
Workloads Archive (PWA, 2009).
In order to test all the features of the algorithms,
we submitted the jobs periodically: 1/3 of the jobs
were submitted at the beginning then the simulator
waited for 200 jobs to finish and update the perfor-
mances of the brokers. After this phase the simula-
tor again submitted 1/3 of all the jobs and waited for
200 more to finish. Lastly the remaining jobs (1/3
again) were submitted. In this way the broker perfor-
mance results could be updated and monitored by the
scheduling algorithms.
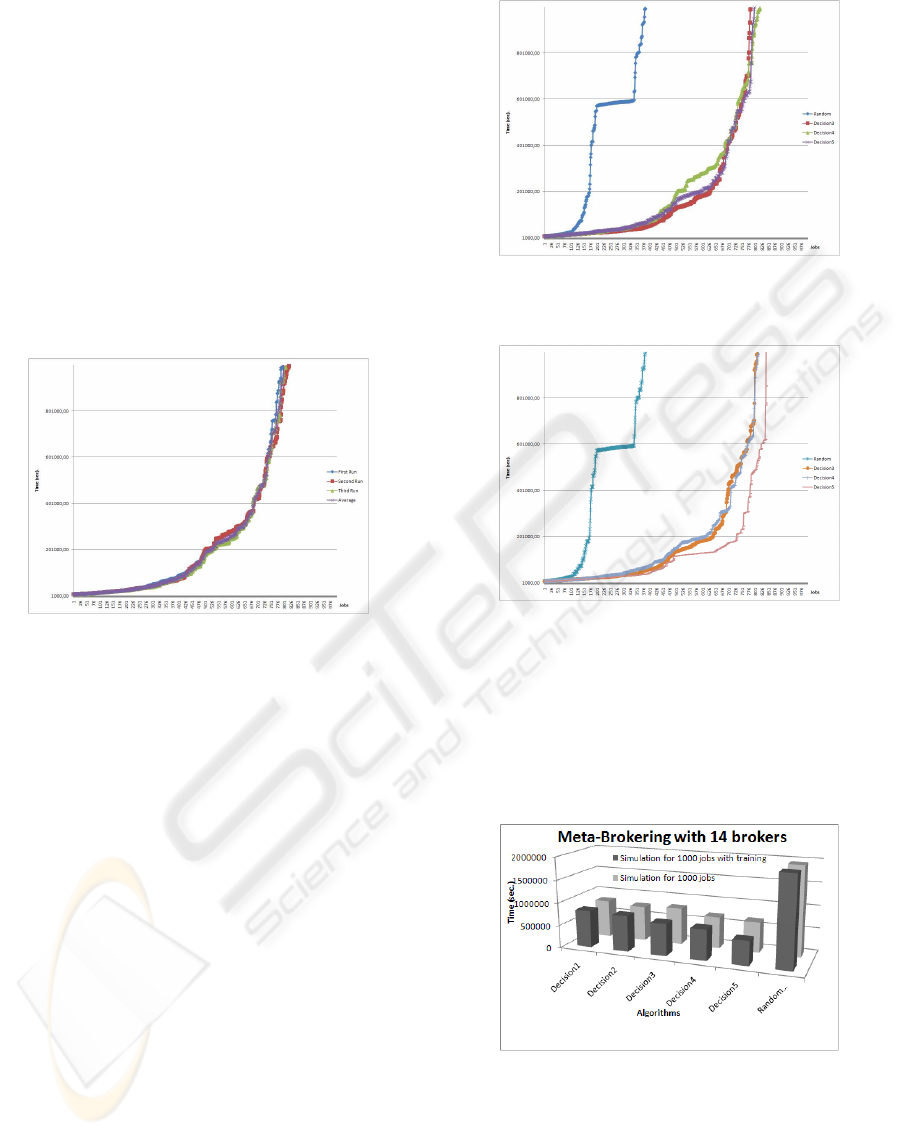
Figure 9: Results of Decision 4 algorithm.
In the previous section we explained how the
two algorithms called Decision4 and Decision5 (both
based on the Pliant system) work. For the evaluation
part we repeated each experiment three times. The
measured simulation results of the Decision4 algo-
rithm can be seen in Figure 9. We noticed that the
measured runtimes for the jobs were very close to
each other. When comparing the various simulation
types we always used the median: we counted the av-
erage runtime of the jobs in each of the three series
and discarded the best and the worst simulations.
A comparison of the simulation results can be seen
in Figure 10 above. In our previous paper (Kertesz
et al., 2009) we used only random number generators
to boost the Decision Maker, and proposed three al-
gorithms called Decision1, Decision2 and Decision3.
In that paper Decision3 gave the best results. This is
why we will compare our new measurements with the
results of this algorithm. We can see that for around
1/3 of the simulations, Decision3 provides better re-
sults, but the overall makespans are better for the new
algorithms.
The simulation results for the algorithms with
training can be seen in Figure 11. As we mentioned
earlier, we used a training process to initiate the per-
Figure 10: Simulation results for the three desicion algo-
rithms compared with the random decision maker.
Figure 11: Simulation results for three desicion algorithms
with training compared with the random decision maker.
formance values of the brokers before job submis-
sions. In this way, the decisions for the first round of
jobs can be made better. Upon examining the results,
Decision4 still performs about the same as Decision3,
but Decision5 clearly overperforms the other two.
Figure 12: Simulation in the main evaluation environment.
In Figure 12 above we provide a graphical sum-
mary of the various evaluation phases. The columns
show the average values of each evaluation run with
the same parameter values. The results clearly show
that the more intelligence (more sophisticated meth-
ods) we put into the system, the better the perfor-
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
52

mance. The most advanced version of our proposed
meta-brokering solution is called the Decision Maker
using the algorithm called Decision5 with training.
Once the number of brokers and job properties are
sufficiently high to set up this Grid Meta-Broker
Service for inter-connecting several Grids, the new
scheduling algorithms will be ready to serve thou-
sands of users even under conditons of high uncer-
tainty.
6 CONCLUSIONS
The Grid Meta-Broker itself is a standalone Web-
Service that can serve both users and grid portals. The
presented enhanced scheduling solution based on Pli-
ant functions allows a higher level, interoperable bro-
kering by utilizing existing resource brokers of differ-
ent grid middleware. It gathers and utilizes meta-data
about brokers from various grid systems to establish
an adaptive meta-brokering service. We developed
a new scheduling component for this Meta-Broker
called Decision Maker that uses Pliant functions with
a random generation in order to select a good per-
forming broker for user jobs even under conditions
of high uncertainty. We evaluated our algorithms in a
grid simulation environment based on GridSim, and
performed simulations with real workload samples.
The evaluation results accord with our expected uti-
lization gains: the enhanced scheduling provided by
the revised Decision Maker results in a more efficient
job execution.
ACKNOWLEDGEMENTS
This study was supported by a grant from the Euro-
pean Community’s Seventh Framework Programme
FP7/2007-2013, grant contract 215483 (S-Cube).
REFERENCES
(1999). Open grid forum website. http://www.ogf.org.
(2009). Parallel workloads archive website.
http://www.cs.huji.ac.il/labs/parallel/workload.
Aczl, J. (1966). Lectures on Functional Equations and Ap-
plications. Academic Press.
Anjomshoaa, A., Brisard, F., Drescher, M., Fellows, D.,
Ly, A., McGough, S., Pulsipher, D., and Savva,
A. (2005). Job submission description language
(jsdl) specification, version 1.0. Technical report.
http://www.gridforum.org/documents/GFD.56.pdf.
Buyya, R., Murshed, M., and Abramson, D. (2002). Grid-
sim: A toolkit for the modeling and simulation of dis-
tributed resource management and scheduling for grid
computing. In Journal of Concurrency and Compu-
tation: Practice and Experience (CCPE, pages 1175–
1220. Wiley Press.
Dombi, J. (1982). A general class of fuzzy operators, the de
morgan class of fuzzy operators and fuzziness mea-
sures induced by fuzzy operators. Fuzzy Sets and Sys-
tems, 8.
Dombi, J. (1997). Pliant system. IEEE International Con-
ference on Intelligent Engineering System Proceed-
ings, Budapest, Hungary.
Howell, F. and Mcnab, R. (1998). Simjava: A discrete event
simulation library for java. In Proc. of the Interna-
tional Conference on Web-Based Modeling and Simu-
lation, pages 51–56.
Iosup, A., Epema, D.H.J., Tannenbaum, T., Farrellee, M.,
Livny, M. (2007). Inter-Operating Grids through Del-
egated MatchMaking. In Proc. of the International
Conference for High Performance Computing, Net-
working, Storage and Analysis (SC07), Reno, Nevada.
Kertesz, A., Dombi, J.D., Dombi, J. (2009). Adaptive
scheduling solution for grid meta-brokering. In Acta
Cybernetica, Volume 19, pp. 105–123.
Kertesz, A. and Kacsuk, P. (2008). Meta-broker for future
generation grids: A new approach for a high-level in-
teroperable resource management. In Grid Middle-
ware and Services Challenges and Solutions, pages
53–63. Springer US.
Kesselman, C. and Foster, I. (1998). The Grid: Blueprint for
a New Computing Infrastructure. Morgan Kaufmann
Publishers.
Knuth, D. E. (1997). The art of computer program-
ming, volume 2 (3rd ed.): seminumerical algo-
rithms. Addison-Wesley Longman Publishing Co.,
Inc., Boston, MA, USA.
Leal, K., Huedo, E., Llorente, I.M. (2009). A decentralized
model for scheduling independent tasks in Federated
Grids. In Future Generation Computer Systems, Vol-
ume 25, Issue 8, pp. 840–852.
Rodero, I., Guim, F., Corbalan, J., Fong, L.L., Liu, Y.G.,
Sadjadi, S.M. (2008). Looking for an Evolution of
Grid Scheduling: Meta-brokering. In Proc. of Core-
grid Workshop in Grid Middleware’07, Dresden, Ger-
many.
Report, N. G. G. (2006). Future for european grids: Grids
and service oriented knowledge utilities – vision and
research directions 2010 and beyond. Technical re-
port. ftp://ftp.cordis.lu/pub/ist/docs/grids/ngg3 eg fi-
nal.pdf.
Zimmermann, H. (1991). Fuzzy Set Theory and its applica-
tions. Kluwer Academic, Dordrecht.
SCHEDULING SOLUTION FOR GRID META-BROKERING USING THE PLIANT SYSTEM
53
