
A CONTEXTUAL ENVIRONMENT APPROACH
FOR MULTI-AGENT-BASED SIMULATION
Fabien Badeig
1,2
, Flavien Balbo
1,2
and Suzanne Pinson
1
1
Universit´e Paris-Dauphine, LAMSADE Place du Mar´echal de Lattre de Tassigny, Paris Cedex 16, France
2
INRETS Institute, Gretia Laboratory, 2, Rue de la Butte Verte, 93166 Noisy Le Grand, France
Keywords:
Multi-agent-based simulation framework, Scheduling policy, Environment, Contextual activation.
Abstract:
Multi-agent-based simulation (MABS) is used to understand complex real life processes and to experiment
several scenarios in order to reproduce, understand and evaluate these processes. A crucial point in the design
of a multi-agent-based simulation is the choice of a scheduling policy. In classical multi-agent-based simula-
tion frameworks, a pitfall is the fact that the action phase, based on local agent context analysis, is repeated
in each agent at each time cycle during the simulation execution. This analysis inside the agents reduces
agent flexibility and genericity and limits agent behavior reuse in various simulations. If the designer wants to
modify the way the agent reacts to the context, he could not do it without altering the way the agent is imple-
mented because the link between agent context and agent actions is an internal part of the agent. In contrast to
classical approaches, our proposition, called EASS (Environment as Active Support for Simulation), is a new
multi-agent-based simulation framework, where the context is analyzed by the environment and where agent
activation is based on context evaluation. This activation process is what we call contextual activation. The
main advantage of contextual activation is the improvement of complex agent simulation design in terms of
flexibility, genericity and agent behavior reuse.
1 INTRODUCTION
Multi-Agent-based simulation (MABS) modeling is
decomposed in three phases (Fishwick, 1994): 1)
problem modeling, 2) simulation model implementa-
tion, 3) output analysis. Problem modeling is related
to the agent modeling, accurately specifying their be-
haviors according to their contexts (Macal and North,
2005); Model implementation is related to coding
and execution of the simulation model by the MABS
framework; Output analysis is related to the analysis
of the simulation results. The scheduling policy is an
essential part of the simulation design. Both the pro-
gression of time and how the agents are activated to
perform an action are taken into account by schedul-
ing policy. The way the agents are activated remains a
relatively unexplored issue even if the activation pro-
cess impacts the agent design.
In multi-agent-based simulation, the agents are
situated in an environment. They are capable of au-
tonomous actions in this environmentin order to meet
their objectives. The scheduling policy defines the ac-
tivation order of the agents that behave according to
their own state and the state of the environment that
they perceive. These states constitute what we call
the agent context. How the agents are activated and
what information is available to compute the agent
context depend on the multi-agent-based simulation
framework.
In most MABS frameworks, context perception
and computation is done by the agents, this type of
framework is agent-oriented and presents several lim-
its. The first limit is that an agent model is not inde-
pendent on the MABS framework. The modeling of
the relations between the context and the agent ac-
tions is done during the problem modeling phase. As
a consequence, the choice of a MABS framework im-
plies the choice of an agent model. Since problem
modeling and model implementation phases are not
clearly separated, the genericity of the agent model is
limited. The second limit is that the context compu-
tation is repetitive because the context is computed in
each agent at each time cycle during the simulation
execution. This computation is done in each agent
even if the agent context has not changed between two
time cycles and/or if a group of agents shares the same
context during a time cycle. The last limit is related
to the flexibility and the reusability of the simulation
model. The flexibility of the simulation model de-
pends on the ease with which the simulation designer
212
Badeig F., Balbo F. and Pinson S. (2010).
A CONTEXTUAL ENVIRONMENT APPROACH FOR MULTI-AGENT-BASED SIMULATION.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Agents, pages 212-217
DOI: 10.5220/0002733302120217
Copyright
c
SciTePress

can change the relation between a context and an ac-
tion. In agent-oriented frameworks, this relation is
computed in the agents and any change in this relation
implies the modification of the agent implementation.
To cope with these limits, we propose a new
MABS framework, the Environment as Active Sup-
port for Simulation (EASS) framework. The EASS
framework is based on a coordination principle that
we have called Property-based Coordination (PbC)
(Zargayouna et al., 2006). This improves the flexi-
bility and reusability of the simulation model: 1) flex-
ibility: in order to evaluate several hypotheses for the
same simulation model, the agent behaviors should
be changed without modifying the implementation of
the agents; 2) reusability: the same action implemen-
tation and context modeling should be used in several
simulation models. These objectives imply that con-
text evaluation should not be computed in the agents,
but should be externalized. Our new framework is
environment-oriented because the environment man-
ages the scheduling policy and the activation process.
Our objective is that an agent is directly activated by
the environment according to its context to perform a
suitable action associated with this context. This acti-
vation process is what we call contextual activation.
The remainder of the paper is organized as fol-
lows. Section 2 focuses on the classical activation
process where advantages and limits are highlighted.
Then we explain why the environment as an active
support of simulation is an interesting alternative. In
Section 3, we detail our EASS framework. Section
4 presents our first results and evaluation. The paper
concludes with general remarks.
2 STATE OF THE ART
As we said before, one of the main tasks in multi-
agent-based simulation design is the choice of a
scheduling policy and more precisely the choice of
the scheduler role in the agent activation process. In
classical MABS frameworks, the scheduler is a spe-
cific component which ordonnes the activation of the
agents. When an agent is activated, it has to com-
pute its context before acting. By context computa-
tion we mean the recovery and the accessible infor-
mation analysis process. When all agents of the sim-
ulation are activated, the time of the simulation is up-
dated (from t to t + δt).
The classical MABS frameworks are designed
to support this activation process. For example, in
the well-known platform CORMAS (Bousquet et al.,
1998), the scheduler activates a same method for each
agent. To represent agent behavior, the designer has
then to specialize it. In the Logo-based multi-agent
platforms such as TurtleKit simulation tool of MAD-
KIT (Ferber and Gutknecht, 2000) or the STARLOGO
system (http://education.mit.edu/starlogo/), an agent
has an automaton that determines the next action that
should be executed.
The main problem of these frameworks is that the
context computation is implemented in each agent.
As presented in the introduction, there are three lim-
its to these frameworks: 1) the difficulty to propose
a simulation model that is independent on the imple-
mentation; 2) the repetitive characteristic of the con-
text computation process during the simulation exe-
cution; 3) the difficulty to propose a simulation model
that is flexible and reusable. Indeed, if the simulation
designer wants to modify the simulation behavior, he
has two ways to do so. The first way is to modify the
scheduler, i.e. the activation order. The second way is
to modify the behavior of the agents, i.e. their reaction
to their context, which often implies a modification of
the way the agent is implemented.
To cope with this last limit, we propose an
environment-oriented framework, that we call EASS
(Environment as Active Support for Simulation).
Context interpretation and context-based reasoning
are key factors in the development of intelligent au-
tonomous systems. Despite significant body of work
in MABS design, there is still a great deal to do in
context modeling since generic context models need
to be further explored, more specifically, the link be-
tween context and agent activation needs to be deeply
studied.
Since the environment is a shared space for the
agents, resources and services, the relations between
them have to be managed. The first responsibility
of the environment is the structuring of the MAS.
Modeling the environment is useful to give a space-
time referential to the system components (Mike and
B., 1999). The second responsibility of the environ-
ment is to maintain its own dynamics (Helleboogh
et al., 2007). Following its structuring responsi-
bility, it has to manage the dynamics of the sim-
ulated environment, ensuring the coherence of the
simulation. For example in the simulation of ant
colonies, the environment can ensure the propagation
and evaporation of the pheromone (Parunak, 2008).
Moreover, the environment can ensure services that
are not at the agent level or can simplify the agent
design. Implemented with the simulation platform
SeSam (http://www.simsesam.de/), in a traffic light
control system (Bazzan, 2005), the environment, with
its global view, gives rewards or penalties to self-
interested agents according to their local decision.
Since the environment with its own dynamics can
A CONTEXTUAL ENVIRONMENT APPROACH FOR MULTI-AGENT-BASED SIMULATION
213

control the shared space, its third responsibility is to
define rules for managing the multi-agent system. For
example, in a bus network simulation (Meignan and
et al., 2006), the main role of the environment is to
constrain agent perceptions and interactions accord-
ing to their state. Because the agents are ”users” of
the services of the environment, and in order to re-
ally create common knowledge, the last responsibil-
ity of the environment is to make its own structure
observable and accessible. In the remaining, we de-
tail our environment-oriented framework and moti-
vate our design choices.
3 THE ENVIRONMENT AS
ACTIVE SUPPORT FOR
SIMULATION (EASS)
FRAMEWORK
The objective of the EASS framework is to improve
the flexibility and reusability of simulation models.
Another advantage of our framework is the use of a
dynamic flexible process for agent activation, i.e. the
possibility for an agent to modify its behavior in an
easy way during the simulation excution. In section
3.1, we present an example that we use all along the
paper to illustrate our framework. Section 3.2 intro-
duces the Property-based Coordination (PbC) princi-
ple. In section 3.3, we describe the general simulation
process with the new scheduling policy. Section 3.4
details the activation process.
3.1 An Illustrative Example
To illustrate our proposition, we use a robot agent-
based simulation example. The interest of this sim-
ulation is the illustration of the following principles
encompassed in our framework: active perception,
decision making of situated agents and coordination
through the environment. In this example, the robot
agents and packets are situated on a grid, i.e. a two-
dimensional space environment. The robot agents act
in this environment and cooperate in order to shift
packets. We have simplified the coordination pro-
cess of the robot simulation because our objective is
to focus on the flexibility and reusability advantages
that underline our proposition. Each robot agent has
a field of perception that limits its perception of the
environment.
As said before, the agent context is computed
thanks to the perceptible available information. We
haveidentified five kinds of contexts. The first context
is the packet shifting where two robot agents are ready
to shift a packet. This context is related to the follow-
ing information: 1) the skills of the robot agents; 2)
the position of the robot agents and the packet. This
context happens when two robot agents with comple-
mentary skills are close to a packet. The other con-
texts are the following: 1) the context packet seeking
happens when a robot agent has no packet at proxim-
ity; 2) the context packet proximity when a robot agent
is close to a packet and no robot agent with a comple-
mentary skill is close to the same packet; 3) the con-
text closest packet discovery where a robot agent per-
ceives the closest packet in its perception field; 4) the
context handled packet discovery where a robot agent
perceives a packet that is handled by another robot
agent with the complementary skill. The two contexts
related to the packet discovery (closest packet discov-
ery and engaged packet discovery) enable to have two
different behaviors of the robot agents : 1) the oppor-
tunist robot agents are those that choose the closest
packet, and 2) the altruist robots are those that choose
the packet knowing that another agent is waiting to
shift it.
A robot agent is able to perform one of the fol-
lowing actions in a time cycle: 1) the action move
randomly where the robot agent move randomly; 2)
the action move in a direction where the robot agent
moves towards a position; 3) the action wait where
the robot agent waits at a position; 4) the action shift
packet where the robot agent shifts the packet.
3.2 Property-based Coordination
Principle
In order to design our environment-oriented frame-
work, we choose to use the Property-based Coor-
dination (PbC) principle (Zargayouna et al., 2006).
This PbC principle enables the environment to en-
compass all the responsibilities presented previously.
In (Zargayouna et al., 2006), we have defined the PbC
principle as follows: The objective of the Property-
based Coordination principle is to represent multi-
agent components by observable Symbolic Compo-
nents and to manage their processing for coordina-
tion purposes.
In PbC, two categories of symbolic components
are defined. The first category is the description of
real components of the multi-agent system: agents,
messages, and objects. The descriptions constitute
an observable state of the MAS components. The
data structure chosen is a set of property-value pairs.
Thus, an agent has its own process and knowledge,
and possesses a description which is registered in-
side the environment. Since the only observable
components are the descriptions inside the environ-
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
214
ment, a control can be applied by the environment
on these descriptions. In the robot simulation exam-
ple (see section 3.1), the description of a opportunist
robot with the skill carry is written as follows: <
(id, 5), ( field
perception
, 4), (id
packet
, unknown), (skill,
carry), (position, (3, 8)), (behavior, opportunist),
(time, 5) >. This opportunist robot agent with the id 5
perceives the descriptions of the other MAS compo-
nents that are situated more 4 cases around it (prop-
erty field
perception
). This robot agent is situated at the
position (3, 8) and has no packet. This description is
registered inside the environment.
The second symbolic component category is re-
lated to the abstract MAS components, especially to
the coordination components. By coordination com-
ponents, called filters, we mean a reification of the
relation between an activation context and an agent
action. An activation context is a set of constraints
on the properties of the descriptions that defines the
context that satisfies an agent need. In the modeling
phase, the relations between the contexts and the ac-
tions have to be represented. We have defined only
one kind of robot agent, the robot agents with the skill
carry or raise and the behavior altruist or opportunist.
The behavior of a robot agent is either opportunist or
altruist as far as its choice of a packet in its percep-
tion field is concerned. The opportunist robot agents
are those that choose the closest packet. The altruist
robots are those that choose the packet knowing that
another agent is waiting to shift it. A robot agent is
modeled when all the relations between the contexts
and the actions are represented giving as a result a
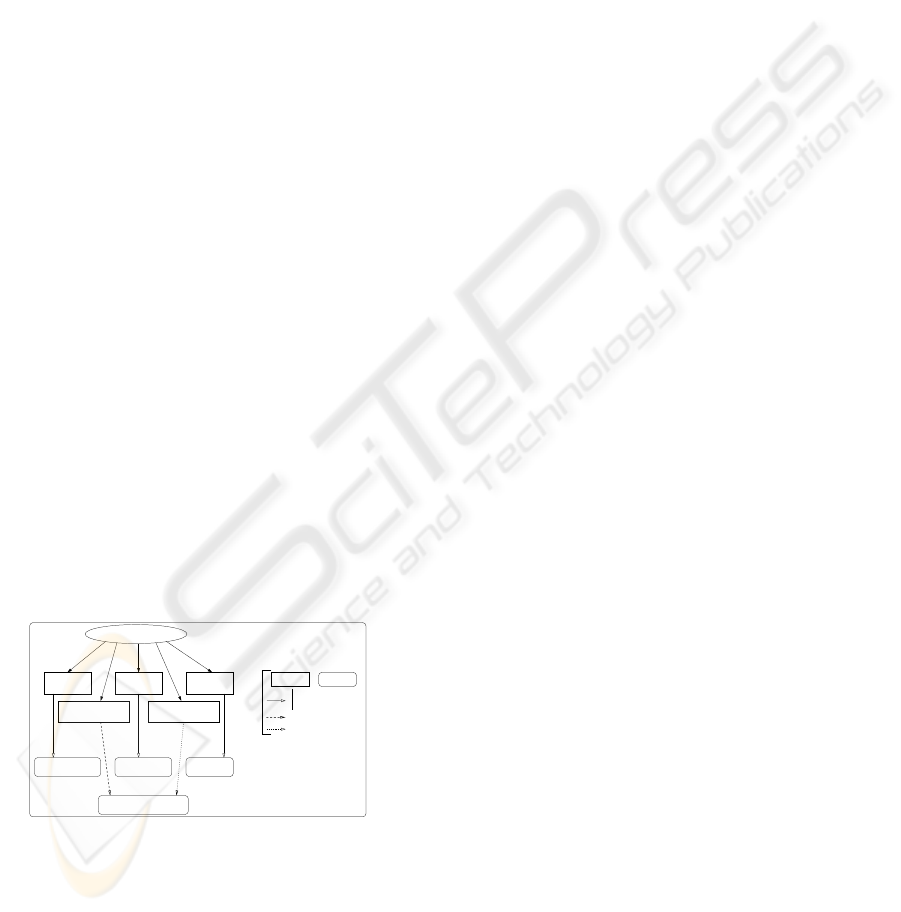
set of filters. Figure 1 gives the relations that enable
to model opportunistic or altruist robot agents. The
difference relies on the context to activate the action
move in a direction.
ROBOT
CONTEXT IDENTIFICATION
packet
proximity
packet
shifting
packet
seeking
engaged
packet discovery
packet discovery
closest
LINK CONTEXT - ACTION
waitingshift packetmove randomly
f
packet seeking
f
packet shifting
f
engaged packet discovery
f
closest packet discovery
move in a direction
f
packet proximity
altruist robot
opportunist robot
altruist robot
opportunist robot
actioncontext
caption:
Figure 1: Agent behaviors and activation context.
In the robot simulation example, if a robot agent
perceives a packet in its perception field, its need is
to move in the direction of the packet and its con-
text is then the information about this packet. When
a filter is triggered, the action to be performed by an
agent is activated. The same filter can be used by sev-
eral agents if they have the same need. In our exam-
ple, the altruist and opportunist robot agent share the
filters f
packet seeking
, f
packet shifting
and f
packet proximity
.
For example, the filter f
packet proximity
reifies the link
between the context packet proximity and the agent
action waiting.
The reification of agent needs by the filters is the
starting point of contextual processing of agent action.
The advantage is that each agent choose its reaction to
its current context including its own state.
3.3 Our Approach of the Simulation
Process
In EASS framework, the environment manages the
filters that are the result of the modeling phase, and
the information related to the simulation components
(agents, objects, ...). In addition, the environment in-
tegrates the management of the scheduler and of the
simulation time. Thus, the environment is able to ap-
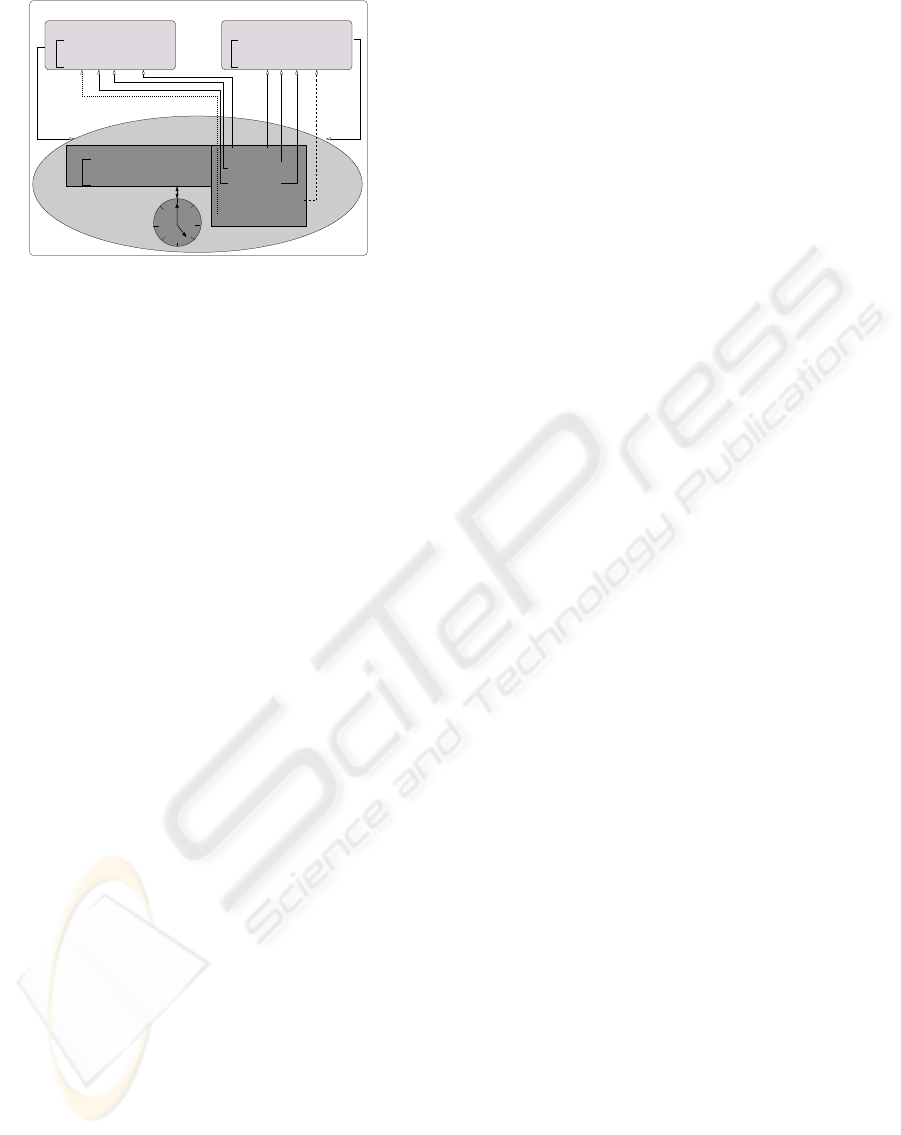
ply what we call contextual activation. An agent is
directly activated by the environment depending on
its context and performs the suitable action associated
with this context (see figure 2).
Each agent chooses to put dynamically a filter in-
side the environment according to its behavior, and
only filters inside the environment are taken into ac-
count in the simulation process. In figure 2, the robot
agents R
1
and R
2
put in the environment several filters
corresponding to the contexts they want to activate. In
this figure, each filter is represented by a link between
the scheduler (SP) and the agent. So the environ-
ment contains the filters related to the contexts packet
seeking, closest packet discovery, engaged packet dis-
covery, packet proximity and packet shifting. The al-
truist agent robots and the opportunist ones share the
same filters for the evaluation of the contexts packet
seeking, packet proximity and packet shifting. The be-
havior distinction between this two types of agents is
done on the evaluation of the context about the packet
discovery (see section 3.1). When an agent is acti-
vated, it performs the suitable action and has to up-
date its internal time. Before performing an action
associated to a context, an agent robot validates the
execution of this action. The minimal condition to
evaluate the context of a filter for an agent is the com-
parison between the internal time of the agent and the
simulation time. The internal time of the agent has to
be inferior or equal to the simulation time.
In the robot simulation example, at a time cycle,
if the internal time of the agent R
1
is inferior or equal
to the simulation time and if only the context engaged
packet discovery is verified for R
1
, R
1
is activated to
perform the action associated with this link and it up-
A CONTEXTUAL ENVIRONMENT APPROACH FOR MULTI-AGENT-BASED SIMULATION
215
B
B
EASS framework
1/ validation of the action
2/ execution of the action
1/ validation of the action
2/ execution of the action
Agent altruist R
1
Agent opportunist R
2
Scheduler
SP
2/ activation of the agent action
1/ context computation
action
action
engaged packet discovery
packet seeking
closest packet discovery
packet shifting
packet proximity
contextual activation
contextual activation
Environment
update
time
simulation
Figure 2: Contextual activation approach.
dates its internal time. When all the agents have an
internal time superior to the simulation time, all the
agents have been activated and the simulation time
cycle is over. So the simulation time is updated from
time t to t + δt.
The advantage of contextual activation is the sim-
ulation flexibility. This means that agent behavior
can be easily modified. By modifying the relation
between actions and contexts, agent behavior is au-
tomatically modified as well as simulation behavior.
Agent behavior can be modified in three ways: 1) if
the action associated with a link is modified (the agent
wants to react differently to a context); 2) if the con-
text of a filter is modified and not the action associated
(the agent wants to modify the situation triggering an
action) or if the agent changestheconditions on a con-
text; 3) if the agent put or removes a link during the
simulation execution (the agent wants to activate or to
desactivate a reaction to a specific context).
3.4 Scheduling Policy
The environment manages the scheduling policy that
consists in organizing the set of the filters and the sim-
ulation time. Our purpose is to manage the schedul-
ing policy and the simulation time thanks to the same
formalism about the filters. Consequently, the envi-
ronment contains two types of filters. The first type is
related to the activation process of the agents and the
second is related to the management of the simula-
tion. In a multi-agent-based simulation using EASS,
each filter evaluation has to be scheduled. In EASS,
there are two scheduling levels: the global scheduling
level which controls the execution of the simulation,
and the local scheduling level which controls the con-
textual activation of the agents.
1/ At the global scheduling level, our proposition
is to control the execution of the simulation by a state
automaton that we call execution automaton where a
state is a set of filters. By default, the execution au-
tomaton contains only one state related to the man-
agement of the simulation. Its contains at least two
filters called f
default
that activates the agents by de-
fault and f
time update
that updates the time of the sim-
ulation. The filter f
default
compares the internal time
of agents and the time of the simulation. The internal
time of an agent represents the time when an agent
wants to be activated. Consequently, the internal time
of agents is observable and the agents have an observ-
able property called time. The value of this property
corresponds to the next time when the agent wants to
be activated. In the robot simulation example, the fil-
ter f
default
is renamed f
packet seeking
.
With this only state, our simulator behavesaccord-
ing to the classical scheduling policy presented in sec-
tion 2 with only the filters ftime update and f
default
.
The filter called f
time update
enables a discrete man-
agement of the simulation time. The filter f
default
ac-
tivates the action defaultAction that has to be spe-
cialized by the designer. Thus, at each time cycle,
all agents are activated without context thanks to the
filter f
default
. When an agent is activated, he has to
compute their context to determine the suitable action
to perform.
In our example of robot simulation, the execu-
tion automaton is composed of two states. The first
state contains the filters associated with the con-
texts : packet shifting, packet proximity and packet
discovery (respectively f
packet shifting
, f
packet proximity
and f
packet discovery
). The second state contains the
filters f
packetseeking
which is the default filter, and
f
time update
. The transitions between the execution au-
tomaton states are triggered by the value of a variable
state that is registred inside the environment. The fil-
ter f
stateX→stateY
enables to change the value of the
variable state from stateX to stateY. The transition
between states is done when there is no filters belong-
ing to the current state waiting to be triggered. A cy-
cle of simulation corresponds to the evaluation of all
filters in each state of the execution automaton. The
order of the execution states is important because it
determines the group of filters that will be evaluated.
Consequently, the order of the states can be changed
to test other scenario and to modify the simulation be-
havior.
2/ The local scheduling level is related to the man-
agement of the filters which are in the same state of
the execution automaton. At each time cycle, a simu-
lation agent performs at most one action. In one state
of the executionautomaton, three problems may arise:
1) a conflict problem between potential filters which
can be triggered for the same agent; 2) the fact that
the same agent may be activated more than once in
the same cycle (uniqueness of agent action); 3) what
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
216

happens if a simulation agent is not related to any fil-
ters. To solve the conflict problem, our proposition is
to give a priority level to each filter. The filter with
the highest priority is evaluated before a filter with
a lower priority in the same state of the execution au-
tomaton. In a simulation time cycle, the uniqueness of
an agent action is ensured by a comparison between
the internal time of the agent and the time of the simu-
lation. If an agent has not filter that has been triggered
at the current time cycle and if its internal time is in-
ferior or equal to the time of the simulation, the filter
f
default
is used to activate this agent.
This contextual activation approach presents sev-
eral advantages: 1) two control levels, i.e. a global
scheduling level and a local scheduling level, allow a
better way to modify the simulation behavior; 2) the
activation is contextual and avoids a repetitive com-
putation of the context inside the agents; 3) the same
agent is activated at most once a time cycle.
4 EXPERIMENTATION AND
FIRST RESULTS
In order to study the feasibility of our proposal, a
prototype of our MABS framework has been imple-
mented as a plugging of the multi-agent platform
Madkit (Ferber and Gutknecht, 2000). MadKit is a
modular and scalable multi-agent platform written in
Java. MadKit software architecture is based on plug-
ins and supports the addition or removal of plugins to
be adapted to specific needs. Our plugin is composed
of an environment component with an API that en-
ables agents to add/retract/modify their descriptions
and filters. The instantiation of the MAS components
into a Rules Based System (RBS) is straightforward:
the descriptions are the facts of the rule engine, and
the filters are its rules. The RETE algorithm decides
rule firing.
Thanks to a more complex robot simulation ex-
ample (Badeig et al., 2007), we have undertaken sev-
eral tests and validation as far as the flexibility of
the EASS model is concerned. The flexibility of the
proposition has been evaluated by the number of sim-
ulations that have been tested without changing the
implementation of the agents. With eight filters, we
have tested six simulations with two different inter-
action policies. More details related to the efficiency
of the EASS framework are given in (Badeig et al.,
2007).
5 CONCLUSIONS
In this paper, we have presented a new framework
called EASS (Environment as Active Support for
Simulation) for multi-agent-based simulations. In
this framework, we have proposed a new activa-
tion process that we call contextual activation. Our
proposition is based on the Property-based Coordina-
tion(PbC) principle which argues that the components
of a multi-agent system have to be observable through
a set of properties. We propose to represent explicitly
the relation between the agent actions and their con-
texts. The main advantage is to improve the flexibil-
ity of the simulation design and the reusability of the
simulation components.
REFERENCES
Badeig, F., Balbo, F., and Pinson, S. (2007). Contextual
activation for agent-based simulation. In ECMS07,
pages 128–133.
Bazzan, A. L. C. (2005). A distributed approach for coor-
dination of traffic signal agents. Autonomous Agents
and Multiagent Systems, 10(1):131–164.
Bousquet, F., Bakam, I., Proton, H., and Page, C. L. (1998).
Cormas: Common-pool resources and multi-agent
systems. In IEA/AIE, pages 826–837.
Ferber, J. and Gutknecht, O. (2000). Madkit: A generic
multi-agent platform. In 4th International Conference
on Autonomous Agents, pages 78–79.
Fishwick, P. A. (1994). Computer simulation: Growth
through extension. In Society for Computer Simula-
tion, pages 3–20.
Helleboogh, A., Vizzari, G., Uhrmacher, A., and Michel,
F. (2007). Modeling dynamic environments in multi-
agent simulation. Autonomous Agents and Multi-
Agent Systems, 14(1):87–116.
Macal, C. M. and North, M. J. (2005). Tutorial on agent-
based modeling and simulation. In WSC ’05: Pro-
ceedings of the 37th conference on Winter simulation,
pages 2–15. Winter Simulation Conference.
Meignan, D. and et al., O. S. (2006). Adaptive traffic control
with reinforcement learning. In ATT06, pages 50–56.
Mike, B. and B., J. (1999). Multi-agent simulation: New
approaches to exploring space-time dynamics within
gis. Technical Report 10, Centre for Advanced Spatial
Analysis, University College London.
Parunak, D. (2008). Mas combat simulation. In Defence In-
dustry Applications of Autonomous Agents and Multi-
Agent Systems, Whitestein Series in Software Agent
Technologies and Autonomic Computing, pages 131–
150. Springer Verlag.
Zargayouna, M., Saunier, J., and Balbo, F. (2006). Prop-
erty based coordination. In Euzenat, J. and Domingue,
J., editors, AIMSA, volume 4183 of Lecture Notes in
Computer Science, pages 3–12. Springer.
A CONTEXTUAL ENVIRONMENT APPROACH FOR MULTI-AGENT-BASED SIMULATION
217
