
HANDLING DYNAMIC MULTIOBJECTIVE PROBLEMS WITH
PARTICLE SWARM OPTIMIZATION
Alan D
´
ıaz Manr
´
ıquez, Gregorio Toscano Pulido and Jos
´
e Gabriel Ram
´
ırez Torres
Laboratorio de Tecnolog
´
ıas de Informaci
´
on, CINVESTAV-Tamaulipas
Km. 6 carretera Cd. Victoria-Monterrey. Cd. Victoria, Tamaulipas, 87267, Mexico
Keywords:
Dynamic multi-objective optimization, Particle swarm optimization, Multi-objective optimization.
Abstract:
In this paper the hyperplane distribution and Pareto dominance were incorporated into a particle swarm op-
timization algorithm in order to allow it to handle dynamic multiobjective problems. When a change in a
dynamic multiobjectve function is detected, the proposed algorithm reinitializes (in different ways) the PSO’s
velocity parameter and the archive where the non-dominated solutions are beeing stored such that the algorithm
can follow the dynamic Pareto front. The proposed approach is validated using two dynamic multiobjective
test functions and an standard metric taken from the specialized literature. Results indicate that the proposed
approach is highly competitive which can be considered as a viable alternative in order to solve dynamic
multiobjective optimization problems.
1 INTRODUCTION
Since life is dynamic, it is only natural to expect that
the problems from daily life are dynamics. Robot path
planning, or the selection of routes in a communica-
tions network are some problems whose function fluc-
tuates over time or incorporates some kind of noise.
These problems are called “non-stationary” or “dy-
namic”.
A dynamic optimization problem (DOP) may in-
volve two or more functions to be optimized simulta-
neously (also known as dynamic multiobjective op-
timization problems, or DMOP for short), as well
as constraints and parameters which can be changed
over time. Dealing with a DMOP increases the com-
plexity of a dynamic problem, since it is imperative
to detect the change in order to re-evaluate the previ-
ously stored solutions. Also, it can increase the num-
ber of objective functions, and therefore the optimiza-
tion process may change dramatically.
Although the study of this type of problems is not
new, most of the proposed approaches transform the
original dynamic problem into many static optimiza-
tion problems. The scientific community of evolu-
tionary computation has focused their efforts on de-
signing approaches to manage a set of valid solu-
tions (population) to solve these problems without
performing any transformation. The resulting ap-
proaches can take advantage of previous knowledge
to direct the search.
Kennedy and Eberhart proposed an approach
called “Particle Swarm Optimization” (PSO) which
was inspired on the choreography of a bird flock. Like
other evolutionary algorithms, PSO uses a set of pos-
sible solutions which will be “evolved” until an opti-
mal solution or a termination criteria is reached. In
this case, each solution (x) is represented by a parti-
cle, and a set of particles are represented by a swarm.
The responsibility of evolving (moving) the swarm to
the optimal region corresponds to the velocity equa-
tion. This equation is usually composed by three
elements: a velocity inertia, a cognitive component
(pbest) and a social component (gbest). The entire
approach can be seen as a distributed behavioral al-
gorithm that performs (in its more general version) a
multidimensional search. In the simulation, the be-
havior of each particle is affected by either the best
local particle (i.e., within a certain neighborhood) or
the best global particle (Kennedy and Eberhart, 2001).
An interesting aspect of PSO is that it allows in-
dividuals to benefit from their past experiences (note
that in other approaches such as the genetic algorithm,
normally the current population is the only “memory”
used by the individuals).
The remain of this paper is organized as follows:
Basic concepts are given in Section 2. In Section 3,
we present the dynamic multiobjective state-of-the-
art. Section 4 describes the proposed algorithm and
337
Díaz Manríquez A., Toscano Pulido G. and Gabriel Ramírez-Torres J. (2010).
HANDLING DYNAMIC MULTIOBJECTIVE PROBLEMS WITH PARTICLE SWARM OPTIMIZATION.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Artificial Intelligence, pages 337-342
DOI: 10.5220/0002734403370342
Copyright
c
SciTePress

the components that it is conformed by. Section 5
presents the experiments and the comparison of re-
sults. Finally, Section 6 provides the concluding re-
marks and future work.
2 BASIC CONCEPTS
Definition 1 (Dynamic Multiobjective Optimiza-
tion Problem (DMOP)). Find ~x which minimizes:
~
f (~x,t) = [ f
1
(~x,t), f
2
(~x,t),..., f
k
(~x,t)]
T
, subject to m
inequality constraints: g
i
(~x,t) ≤ 0 i =
1,2, ...,m, and p equality constraints: h
j
(~x,t) =
0 j = 1, 2,..., p, where ~x is the vector of
decision variables;
~
f is the set of objective functions
to be minimized in time t. The functions g and h, rep-
resent the set of constraints, that define the feasible
region F in time t.
Definition 2 (Pareto Optimality). A point ~x
∗
∈ F
is Pareto optimal in time t, if for every ~x ∈ F and I =
{1,2, .. ., k} either, ∀
i∈I
( f
i
(~x,t) = f
i
(~x
∗
,t)) or, there is
at least one i ∈ I such that f
i
(~x,t) > f
i
(~x
∗
,t)
Definition 3 (Pareto Dominance). A vector ~x =
[x
1
,. .. ,x
k
]
T
is said to dominate ~y = (y
1
,. .. ,y
k
) (de-
noted by~x ~y) if and only if x is partially less than y,
i.e., ∀i ∈ {1, .. ., k}, x
i
≤ y
i
∧ ∃i ∈ {1,. . ., k} : x
i
< y
i
.
Definition 4 (Pareto-Optimal Set). For a given
time t and a given MOP
~
f (x,t), the Pareto optimal set
(P
∗
) is defined as:
P
t
:= {x ∈ F | @ x
0
∈ F
~
f (x
0
,t)
~
f (x,t)}. (1)
Definition 5 (Pareto Front). For a given MOP
~
f (x,t), and Pareto optimal set P
t
, in time t, the Pareto
front (P F
t
) is defined as:
P F
∗
:= {~u =
~
f = ( f
1
(x,t), .. ., f
k
(x,t)) | x ∈ P
∗
}.
(2)
In the general case, it is impossible to find an an-
alytical expression of the line or surface that contains
these points. The normal procedure to generate the
Pareto front is to compute the feasible points F and
their corresponding f (F ). When there is a sufficient
number of these, it is then possible to determine the
non-dominated points and to produce the Pareto front.
Furthermore, DMOP can be clustered into four
types (Farina et al., 2004):
• Type I. Change on the Pareto-optimal set (P
t
),
whereas the Pareto-optimal front (optimal objec-
tive values) (P F
t
) does not change.
• Type II. Both P
t
and P F
t
change.
• Type III. P
t
does not change, whereas P F
t
changes.
• Type IV. Both P
t
and P F
t
do not change, al-
though the problem can dynamically change (e.g.,
the constraints can vary).
Since Types II and III are the most challenging
type of DMOP, we focused in solving these kind of
problems.
3 RELATED WORK
Evolutionary algorithms have been successfully ap-
plied to solve DMOPs. Their succeed might be di-
rected by their population-based nature, since this
allows to use the most of the previous discovered
knowledge in order to follow the change in the en-
vironment.
Bingul (Bingul, 2007) solved a dynamic multiob-
jective optimization problem (DMOP) using an ag-
gregating function approach with a Genetic Algo-
rithm (GA). Zeng et al. (Zeng et al., 2006) intro-
duced a dynamic orthogonal multiobjective evolu-
tionary called DMOEA. Their approach selects ran-
domly between an orthogonal crossover operator and
a linear crossover operator. The first operator was
proposed with the aim to enhance the fitness of the
population while the process is stabilized between
two changes. Hatzakis and Wallace (Hatzakis and
Wallace, 2006) proposed a forward-looking approach
which combines a forecasting technique with an evo-
lutionary algorithm. Deb et al. (Deb et al., 2000)
proposed two modifications to the NSGA-II in order
to be able to handle DMOPs. In the first modifica-
tion, the population is reinitialized whilst in the sec-
ond the population is hyper-mutated depending on the
type of change in the environment (Deb et al., 2006).
Talukder and Kirley (Talukder and Kirley, 2008) used
a new variation operator to follow the Pareto front in
DMOPs. Zhou et al. (Zhou et al., 2006) proposed
two strategies to perform a population re-initialization
when a change in the environment is detected. Wang
and Dang transform the objectives of the original
DMOP in a set of static bi-objective (Yuping Wang,
2008). Ray et al. (Ray et al., 2009) introduced a
memetic algorithm which employs an orthogonal ε-
constrained formulation to deal with multiple objec-
tives and a sequential quadratic programming (SQP)
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
338

solver is embedded as its local search mechanism in
order to improve the convergence rate.
4 PROPOSED APPROACH
PSO has been successfully used for both continuous
nonlinear and discrete binary single objective opti-
mization (Kennedy and Eberhart, 2001). The pseu-
docode of the PSO pseudocode is shown in Algorithm
1.
Algorithm 1. PSO Algorithm.
~
gbest ← ~x
0
for i = 0 to nparticles do
~
pbest
i
← ~x
i
← initialize randomly()
f itness
i
← f (~x
i
)
if f itness
i
< f (
~
gbest) then
~
gbest ← ~x
i
end if
end for
repeat
for i = 0 to nparticles do
for d = 0 to ndimensions do
v
id
← W ∗ v
id
+ C
1
∗ U (0,1) ∗ (pbest
id
− x
id
) + C
2
∗ U (0,1) ∗
(gbest − x
id
)
x
id
← x
id
+ v
id
end for
f itness
i
← f (~x
i
)
if f itness
i
< f (
~
pbest
i
) then
~
pbest
i
← ~x
i
end if
if f itness
i
< f (
~
gbest
i
) then
~
gbest
i
← ~x
i
end if
end for
until Termination criterion
4.1 Handling Multiple Dynamic
Objectives with PSO
PSO seems particularly suitable for dynamic multiob-
jective optimization mainly because of the high speed
of convergence that the algorithm presents for single-
objective optimization. Based on such behavior, one
would expect that a multiobjective PSO (MOPSO) to
be very efficient computationally speaking. However,
in order to be able to handle dynamic multiobjective
problems there is necessary to perform three main
modifications to the original algorithm.
• To modify the algorithm to handle multiple ob-
jectives and produce a set of non-dominated solu-
tions in a single run.
• To modify the algorithm to obtain a good distribu-
tion of solutions.
• To modify the algorithm in order to handle its be-
havior when a change is detected.
A natural modification to a PSO algorithm aimed
handle multiple objectives is replace the comparison
operator in order to determine whether a solution a
is better a solution b. The analogy of particle swarm
optimization with evolutionary algorithms makes ev-
ident the notion that using a Pareto ranking scheme is
a straightforward way to extend the approach to han-
dle multiobjective optimization problems. However,
if we merge a Pareto ranking scheme with the PSO al-
gorithm a set of non-dominated solutions will be pro-
duced (by definition, all non-dominated solutions are
equally good). Having several non-dominated solu-
tions implies the inclusion into the algorithm of both:
an additional criteria to decide whether a new non-
dominated solution is pbest or gbest and a strategy to
select the guide particles (pbest and gbest).
In order to select an strategy to choose the gbest
solution, we performed three experiments:
1. To choose randomly among all the particles in the
archive.
2. To choose the non-dominated particle closer to
pbest.
3. To choose the non-dominated particle more dis-
tant to the pbest.
Experimental results indicate us that the best strat-
egy to select the gbest was: 1) random selection.
Several approaches have suggest that the use of
elitism by means of an external archive in order to
store the non-dominated solutions can enable most al-
gorithms to find the Pareto front. However, the size
of the archive can grow very fast, and therefore, it is
imperative to maintain a small set of non-dominated
solutions. We selected the hyper-plane distribution
algorithm in order to maintain diversity and to re-
duce the size of non-dominated solutions stored in the
archive(Blinded, 2005).
4.2 Hyper-plane Distribution
The core idea of this proposal is to perform a good
distribution of the hyper-plane space defined by the
minima (assuming minimization) from the objectives,
and use such distribution to select a representative
subset from the whole set of non-dominated solutions.
The algorithm works as follows: First it accepts a set
of non-dominated vectors and a number n of solutions
of the desirable subset as its input. Then, the algo-
rithm selects those vectors which have the minimum
and maximum value of each objective, and it groups
them into two sets, the minima set (called MIN), and
HANDLING DYNAMIC MULTIOBJECTIVE PROBLEMS WITH PARTICLE SWARM OPTIMIZATION
339
the maxima set (called MAX). Using MIN, the algo-
rithm creates a hyper-plane, and distributes its space
into n − 1 fixed-size sub hyper-planes. After that, it
computes lines on each subdivision; such lines are
perpendicular to the hyper-plane. Finally, the algo-
rithm returns the closest vectors to each line.
4.3 Adaption to the Change
Since the natural behavior of a DMOP is to be chang-
ing, it is essential that the algorithm performs a good
reaction when a change is detected. Therefore, in or-
der to properly follow the Pareto Front, we need to
reinitialize the PSO algorithm. However, such reini-
tialization can be made using four strategies:
• DPSO-1. The current solution (after the change)
will be taken as pbest. The particles are reeval-
uated and the resulting non-dominated solutions
are stored in the archive.
• DPSO-2. This is similar to DPSO-1. However, in
this strategy, the archive will be updated using the
hyper-plane distribution.
• DPSO-3. Similar to DPSO-1, but the velocity of
each particle will be reinitialized to zero.
• DPSO-4. This strategy is similar to DPSO-2, but
this strategy reinitializes the velocity of each par-
ticle (to zero).
5 EXPERIMENTS AND
COMPARISON OF RESULTS
Two test functions were taken from the specialized
literature to compare our approaches. In order to al-
low a quantitative assessment of the performance of
a multiobjective optimization algorithm, the Inverted
Generational Distance (IGD) metric was adopted.
Inverted Generational Distance (IGD): The
concept of generational distance was introduced by
Van Veldhuizen & Lamont (Veldhuizen and Lamont,
1998; Veldhuizen and Lamont, 2000) as a way of es-
timating how far are the elements in the Pareto front
produced by our algorithm from those which belongs
to the true Pareto front of the problem. This measure
is defined as:
GD =
q
∑
n
i=1
d
2
i
n
(3)
where n is the number of non-dominated vectors
found by the algorithm being analyzed and d
i
is the
Euclidean distance (measured in objective space) be-
tween each of these and the nearest member of the
true Pareto front. It should be clear that a value of
GD = 0 indicates that all the elements generated are
in the true Pareto front of the problem.
In order to know how competitive is our approach,
we decided to compare our results with respect to
those obtained by the NSGA II-A and the NSGA II-B
(Deb et al., 2006), these algorithms use the parame-
ter ζ that is the percentage of population which will
be reinitialized in the NSGA II-A and hyper-mutated
in the NSGA II-B, this variation operators would be
applied when a change is detected.
In all the following examples, we report the results
obtained from 100 independent runs of each com-
pared algorithm.
In order to have a fair comparison, we hand-tune
each change to be activated every 500 evaluations of
the objective function. For such sake, we setup the
population of NSGA II-A and NSGA II-B to 52 in-
dividuals and τ
T
= 10 , n
t
= 10, and ζ = 20%. The
DPSO-1, DPSO-2, DPSO-3 and DPSO-4 were exe-
cuted using 20 particles, the size of the archive was
n = 100, and the parameters W = 0.4 and C
1
= C
2
=
1.49.
The tests functions used for the algorithms are
shown in the Table 1.
Table 1: Tests functions.
FDA1
f
1
(X
i
) = x
1
,g(X
II
) = 1 +
∑
x
i
∈X
II
(x
i
− G(t))
2
h( f
1
,g) = 1 −
r
f
1
g
,G(t) = sin(0.5πt)
f
2
= g ∗h( f
1
,g)
t =
1
n
t
b
τ
τ
T
c,
τ is the generation counter and τ
T
is the number
of generations that t is fixed.
X
I
= (x
1
)
T
,x
1
∈ [0, 1], X
II
= (x
2
,..., x
x
n
)
T
,
x
2
,..., x
n
∈ [−1, 1]
FDA2
mod
f
1
(X
i
) = x
1
,g(X
II
) = 1 +
∑
x
i
∈X
II
x
2
i
h(X
III
, f
1
,g) = 1 −
r
f
1
g
e(t,X
III
)
H(t) = 0.2 + 4.8t
2
,t =
1
n
t
b
τ
τ
T
c,
f
2
= g ∗h( f
1
,g)
τ is the generation counter τ
T
is the number
of generations that t is fixed.
X
I
= (x
1
)
T
,x
1
∈ [0, 1], X
II
∈ [−1, 1]
r
2
X
III
=∈ [−1, 1]
r
3
,1 +r
2
+ r
3
= n
The algorithms were executed until 10 changes
have occurred in each test function. However, since
there is a large amount of data, it would be very con-
fused to display it in a numerical mode. Therefore, in
order to presente the results in a more compact way,
we decided to use box-plot graphics of the application
of the IGD metric to the Pareto known before each
change.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
340
●●●
●
●
●
●●●
●●●
●●●
●●
●●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●●
●●●
●●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●●
●●
●●●
●●
●●●
●
●●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●●
●
●
●
●
●
●
●
●
●●●
●
●●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●●
●
●
●
●
●●
●●
●
●●
●
●
●
●
●
●
1 2 3 4 5 6 1 2 3 4 5 6 1 2 3 4 5 6 1 2 3 4 5 6 1 2 3 4 5 6
0.0 0.5 1.0 1.5 2.0
RGD
Change 0 Change 1 Change 2 Change 3 Change 4
●
●●●
●
●
●
●
●
●
●
●●
●
●●
●
●
●
●
●
●●●
●
●
●
●
●
●
●
●●
●
●●
●
●
●
●
●●
●●●
●
●
●
●
●
●
●
●
●
●●●
●●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●●●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
1 2 3 4 5 6 1 2 3 4 5 6 1 2 3 4 5 6 1 2 3 4 5 6 1 2 3 4 5 6
0.0 0.5 1.0 1.5 2.0
RGD
Change 5 Change 6 Change 7 Change 8 Change 9
(a) Inverted generational distance results for FDA1
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
1 2 3 4 5 6 1 2 3 4 5 6 1 2 3 4 5 6 1 2 3 4 5 6 1 2 3 4 5 6
0.0 0.5 1.0 1.5 2.0
RGD
Change 0 Change 1 Change 2 Change 3 Change 4
●
●
●
●
●
●●
●
●
●●●
●●●
●●●
●●
●●
●●
●●
●●
●
●
●
●
●
●
●●●
●●
●●●
●●●
●●●
●●
●●
●
●●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●●●
●●●
●●●
●●
●●
●●
●●
●●
●
●
●
●
●
●
●
●
●
●
●●●
●●
●●●
●●●
●●●
●●
●●
●
●●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●●●
●●●
●●●
●●
●●
●●
●●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●●
●●
●●●
●●●
●●●
●●
●●
●
●●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●●●
●●●
●●●
●●
●●
●●
●●
●●
●
●
●
●
●
●
●
●
●
●
●
●●●
●●
●●●
●●●
●●●
●●
●●
●
●●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●●●
●●●
●●●
●●
●●
●●
●●
●●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
1 2 3 4 5 6 1 2 3 4 5 6 1 2 3 4 5 6 1 2 3 4 5 6 1 2 3 4 5 6
0.0 0.5 1.0 1.5 2.0
RGD
Change 5 Change 6 Change 7 Change 8 Change 9
(b) Inverted generational distance results for FDA2
mod
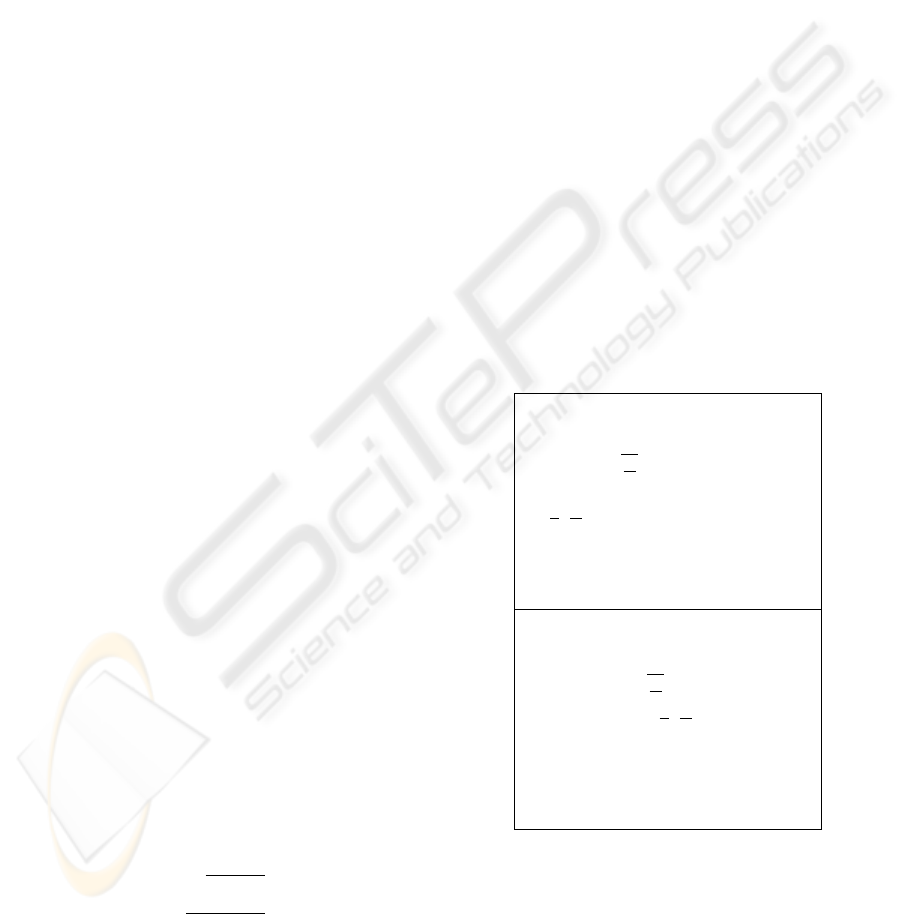
Figure 1: Box-plot of the application of the inverted gener-
ational distance metric to the results produced 100 indepen-
dent runs by 1) DPSO-1, 2) DPSO-2, 3) DPSO-3, 4) DPSO-
4, 5) NSGA II-A and 6) NSGA II-B for both test functions:
(a) and (b) refers to the inverted generational distance for
FDA1 and FDA2, respectively.
Results obtained when FDA1 was optimized show
that all versions of DPSO and the NSGA II-A and
NSGA II-B behaved similarly. Results from IGD sug-
gest, that all versions of DPSO had a better a conver-
gence than NSGA II-A and NSGA II-B (see Figure
1(a)). When comparing the DPSO versions, we can
say that the best performance were for those solutions
algorithm that preserve the velocity value before the
change (those who did not initialized the velocity to
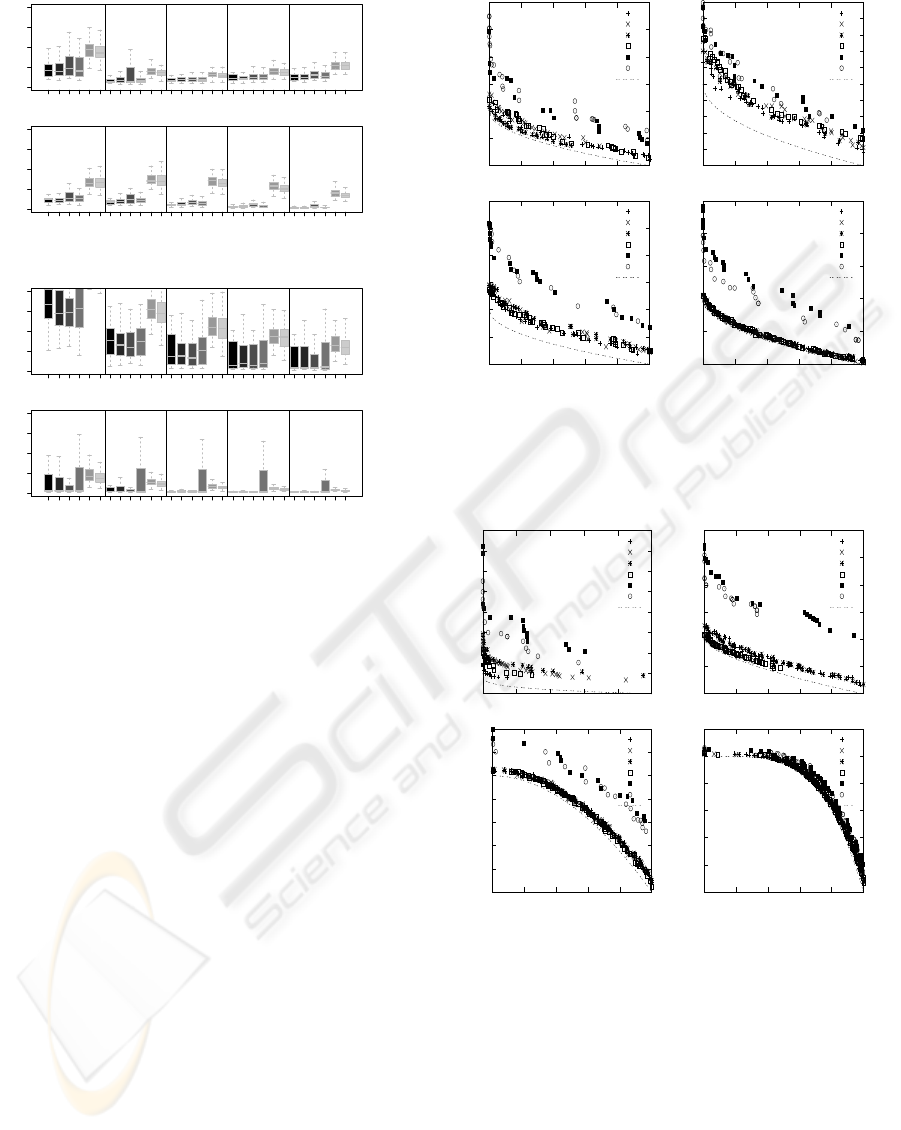
0). Also, in Figure 5, we can see the Pareto fronts pro-
duced by the different algorithms. From this figure, it
is clear that DPSO outperforms the NSGA II-A and
NSGA II-B.
The results obtained for FDA2
mod
show that all
versions of DPSO and the NSGA II-A and NSGA II-
B also behaved similar. However, from the IGD met-
ric shown in Figure 1(b), we can easily observed that
the results from all versions of DPSO outperform to
those solutions obtained by NSGA II-A and NSGA
II-B. When comparing the DPSO versions, we can
say that the reinitialization of the velocity plays a key
role in the algorithm. Such that, in the initial changes
of the fitness function, the algorithms which did not
0
0.5
1
1.5
2
2.5
3
0 0.2 0.4 0.6 0.8 1
DPSO-1
DPSO-2
DPSO-3
DPSO-4
NSGA2-A
NSGA2-B
FDA1
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
0 0.2 0.4 0.6 0.8 1
DPSO-1
DPSO-2
DPSO-3
DPSO-4
NSGA2-A
NSGA2-B
FDA1
0
0.5
1
1.5
2
2.5
3
0 0.2 0.4 0.6 0.8 1
DPSO-1
DPSO-2
DPSO-3
DPSO-4
NSGA2-A
NSGA2-B
FDA1
0
0.5
1
1.5
2
2.5
0 0.2 0.4 0.6 0.8 1
DPSO-1
DPSO-2
DPSO-3
DPSO-4
NSGA2-A
NSGA2-B
FDA1
Figure 2: Pareto fronts produced by all versions of DPSO,
NSGA II-A and NSGA II-B for FDA1 test function: change
1 is shown in the top left; change 3 is shown in the top right,
change 6 is shown in the bottom left, change 9 is shown in
the bottom right.
0
1
2
3
4
5
6
7
8
0 0.2 0.4 0.6 0.8 1
DPSO-1
DPSO-2
DPSO-3
DPSO-4
NSGA2-A
NSGA2-B
FDA2mod
0
0.5
1
1.5
2
2.5
3
0 0.2 0.4 0.6 0.8 1
DPSO-1
DPSO-2
DPSO-3
DPSO-4
NSGA2-A
NSGA2-B
FDA2mod
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0 0.2 0.4 0.6 0.8 1
DPSO-1
DPSO-2
DPSO-3
DPSO-4
NSGA2-A
NSGA2-B
FDA2mod
0
0.2
0.4
0.6
0.8
1
1.2
0 0.2 0.4 0.6 0.8 1
DPSO-1
DPSO-2
DPSO-3
DPSO-4
NSGA2-A
NSGA2-B
FDA2mod
Figure 3: Pareto fronts produced by all versions of DPSO,
NSGA II-A and NSGA II-B for FDA2
mod
test function:
change 1 is shown in the top left; change 3 is shown in the
top right, change 6 is shown in the bottom left, change 9 is
shown in the bottom right.
reinitialize the velocity (to zero), obtained better re-
sults.
6 CONCLUSIONS
We have presented a proposal to extend particle
swarm optimization to handle dynamic multiobjective
HANDLING DYNAMIC MULTIOBJECTIVE PROBLEMS WITH PARTICLE SWARM OPTIMIZATION
341

problems. The proposed approach was validated us-
ing the standard methodology currently adopted for
the evolutionary multiobjective optimization commu-
nity. Results indicate that our approach is a viable al-
ternative since its performance is highly competitive
with respect to some of the best dynamic multiobjec-
tive evolutionary algorithms known-to-date.
One aspect that we would like to explore in the fu-
ture is to study how the DPSO behaves with a differ-
ent the particles’ interconnection topology. Further-
more, we would like to explore the use of different
values for W , C1, and C2.
ACKNOWLEDGEMENTS
Acknowledgements The first author acknowledges
support from CONACyT through a scholarship to
pursue graduate studies at the Information Tech-
nology Laboratory at CINVESTAV-IPN. The sec-
ond author gratefully acknowledges support from
CONACyT through project 90548. Also, This re-
search was partially funded by project number 51623
from “Fondo Mixto Conacyt-Gobierno del Estado de
Tamaulipas”. Finally, we would like to thank to
Fondo Mixto de Fomento a la Investigaci
´
on cient
´
ıfica
y Tecnol
´
ogica CONACyT - Gobierno del Estado de
Tamaulipas for the support to publish this paper.
REFERENCES
Bingul, Z. (2007). Adaptive Genetic Algorithms Applied to
Dynamic Multi-ObjectiveProblems. Appl. Soft Com-
put., 7(3):791–799.
Blinded (2005). Blinded. PhD thesis, Blinded, Blinded.
Deb, K., Agrawal, S., Pratab, A., and Meyarivan, T. (2000).
A Fast Elitist Non-Dominated Sorting Genetic Al-
gorithm for Multi-Objective Optimization: NSGA-II.
KanGAL report 200001, Indian Institute of Technol-
ogy, Kanpur, India.
Deb, K., N., U. B. R., and Karthik, S. (2006). Dynamic
multi-objective optimization and decision-making us-
ing modified NSGA-II: A case study on hydro-thermal
power scheduling. In EMO, pages 803–817.
Farina, M., Deb, K., and Amato, P. (2004). Dynamic Mul-
tiobjective Optimization Problems: Test Cases, Ap-
proximations, and Applications. IEEE Transactions
on Evolutionary Computation, 8(5):425–442.
Hatzakis, I. and Wallace, D. (2006). Dynamic Multi-
Objective Optimization with Evolutionary Algo-
rithms: A Forward-Looking Approach. In et al.,
M. K., editor, 2006 Genetic and Evolutionary Compu-
tation Conference (GECCO’2006), volume 2, pages
1201–1208, Seattle, Washington, USA. ACM Press.
ISBN 1-59593-186-4.
Kennedy, J. and Eberhart, R. C. (2001). Swarm intelli-
gence. Morgan Kaufmann Publishers Inc., San Fran-
cisco, CA, USA.
Ray, T., Isaacs, A., and Smith, W. (2009). A memetic
algorithm for dynamic multiobjective optimization.
In Multi-Objective Memetic Algorithms, volume 171
of Studies in Computational Intelligence, pages 353–
367. Springer Berlin / Heidelberg.
Talukder, A. K. A. and Kirley, M. (2008). A pareto follow-
ing variation operator for evolutionary dynamic multi-
objective optimization. In Proceedings of the IEEE
Congress on Evolutionary Computation 2008 (CEC
2008), Hong Kong, China. IEEE Press, Piscataway,
NJ.
Veldhuizen, D. A. V. and Lamont, G. B. (1998). Multiob-
jective Evolutionary Algorithm Research: A History
and Analysis. Technical Report TR-98-03, Depart-
ment of Electrical and Computer Engineering, Gradu-
ate School of Engineering, Air Force Institute of Tech-
nology, Wright-Patterson AFB, Ohio.
Veldhuizen, D. A. V. and Lamont, G. B. (2000). On Mea-
suring Multiobjective Evolutionary Algorithm Perfor-
mance. In 2000 Congress on Evolutionary Computa-
tion, volume 1, pages 204–211, Piscataway, New Jer-
sey. IEEE Service Center.
Yuping Wang, C. D. (2008). An evolutionary algorithm for
dynamic multi-objective optimization. Applied Math-
ematics and ComputationIn Press.
Zeng, S., Chen, G., Zheng, L., Shi, H., de Garis, H., Ding,
L., and Kang, L. (2006). A Dynamic Multi-Objective
Evolutionary Algorithm Based on an Orthogonal De-
sign. In 2006 IEEE Congress on Evolutionary Com-
putation (CEC’2006), pages 2588–2595, Vancouver,
BC, Canada. IEEE.
Zhou, A., Jin, Y., Zhang, Q., Sendhoff, B., and Tsang, E.
(2006). Prediction-based population re-initialization
for evolutionary dynamic multi-objective optimiza-
tion. In Obayashi, S., Deb, K., Poloni, C., Hiroyasu,
T., and Murata, T., editors, The 4th Int. Conf. on Evo-
lutionary Multi-Criterion Optimization, volume 4403,
pages 832–846. Springer.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
342
