
CONEMAF: A MODULAR MULTI AGENT FRAMEWORK
FOR AUTONOMIC NETWORK MANAGEMENT
Julien Boite, Gérard Nguengang
Advanced Information Technology Lab, Thales Communications SA, 160 Bd de Valmy, 92704 Colombes, France
Maurice Israël, Vania Conan
Advanced Information Technology Lab, Thales Communications SA, 160 Bd de Valmy, 92704 Colombes, France
Keywords: Autonomic network management, Cognitive agents, Situated knowledge, OSGi, Jess, OWL.
Abstract: Communication networks are growing both in terms of size and complexity. Because of the huge amount of
monitored data to analyse and correlate, the management task that relies mostly on human operators is
becoming time-consuming, labour-intensive and costly. The centralized management paradigm adopted by
current management systems is no longer suitable for such networks. A distributed management with more
autonomy delegated to network devices is therefore paramount to master this complexity efficiently.Multi-
agent systems characteristics fit the requirements that must be taken into account to integrate autonomicity
in networks. This paper presents CONEMAF, a novel modular multi-agent platform for autonomic network
management. CONEMAF is fully distributed, allows situated knowledge analysis and implements a
cognitive cycle for autonomic management. Implemented on top of OSGi, the present release makes use of
well-proven Java-based COTS. CONEMAF has been deployed on Linux routers and is demonstrated for
autonomic routing in a wireless mesh network.
1 INTRODUCTION
The management systems of future networks are
expected to embed autonomic capabilities (Strassner
J. K., 2006) in order to face the increasing
complexity of communication networks (Ganek,
2003). This autonomic enablement implies that
networks are able to self-manage (e.g., self-
configure, self-heal, self-optimize, self-protect)
(Horn, 2001). Their behaviour is set from high-level
policies that they implement by dynamically
adapting network parameters (routing, protocols,
queue sizes, radio frequencies…) to the varying
network conditions (changes in topology, resource
availability, traffic demands…).
Designing an autonomic system for networks
management involves several technologies and
disciplines (Kephart, 2003) and has received
significant research effort in the past five years. The
generic architecture for autonomic information
systems management proposed by IBM (IBM, 2006)
is a common base for various works. FOCALE
(Strassner J. A., 2006) adds semantics to this
architecture. Algorithmic issues including learning
capabilities (Tesauro, 2007), event correlation
(Sterritt, 2002), data mining (Garofalakis, 2001), or
bio-inspired mechanisms (Agoulmine, 2006) are
under investigation to provide the expected
autonomic capabilities.
On the implementation side, attempts are made
to add more flexibility in network protocol design:
(Keller, 2008) proposes a framework for self-
composing protocol stacks in multiple compartments
to replace the existing non-flexible Internet layers,
and (Manzalini, 2006) provides a platform for
autonomic service composition.
Focused on the middleware part of the
framework, another research trend consists in
integrating mobile agents in the network to collect
distributed information or perform remote
computations (Lefebvre, 2005). A combination of
both mobile and stationary agents to manage mobile
ones is proposed in (Ray, 2008).
Starting from the network administrator’s
viewpoint, our aim is to provide a software platform
224
Boite J., Nguengang G., Israël M. and Conan V. (2010).
CONEMAF: A MODULAR MULTI AGENT FRAMEWORK FOR AUTONOMIC NETWORK MANAGEMENT.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Agents, pages 224-231
DOI: 10.5220/0002735502240231
Copyright
c
SciTePress

that supports autonomic self-management of the
network governed by high-level policies set by the
operator. Multi-agent architecture principles support
coordination of distributed intelligent components,
which match our requirements. The most popular
multi-agent implementations, such as JADE, Zeus or
Cougaar (Ricordel, 2000) (Fang, 2005) follow the
FIPA specifications for interoperability purposes
(FIPA, 2005). These efforts, and Jade in particular,
have guided some of the choices we have made.
However, these implementations do not fulfil one of
the main requirements for a scalable and robust
network management system. Indeed, they rely on a
centralized component (the FIPA Agent
Management System) that does not meet the full
distribution characteristic we need.
The major contribution of this work is the
specification and design of CONEMAF (COgnitive
NEtwork MAnagement Framework), a flexible and
fully distributed platform that facilitates the
implementation and the dynamic deployment of
autonomic control loops in network elements.
CONEMAF is able to scale to large networks in a
robust and fault-tolerant way. It can be deployed on
a large variety of network equipments (routers,
home-gateways, or even terminals). A first release
has been implemented and deployed on Linux
routers to demonstrate enhanced routing features in a
wireless mesh network.
The paper is organized as follows: section two
describes the autonomic networking challenges in
terms of architecture and software requirements.
Section three introduces the modular CONEMAF
platform, the baseline technologies used, and details
its components. Section four demonstrates the use of
CONEMAF to support autonomic congestion
management in a mesh environment. Section five
concludes with future works.
2 THE AUTONOMIC
NETWORKING CHALLENGE
Networks are complex and costly systems that
cannot be changed overnight. Enhanced
management capabilities of converged future
networks must be introduced gradually. The
corresponding architecture and implementations
must thus address the conflicting requirements of
providing new management features and of
deploying on legacy networks.
2.1 Autonomic Network Architecture
In the autonomic network vision, each network
equipment (be it a router, a gateway…) is potentially
considered as an autonomic element. An autonomic
element is capable of monitoring the network state
and modifying it based on conditions that
administrators have specified. This “cognitive
cycle”consists in constantly monitoring the network
state, making decisions and executing
reconfiguration actions.
To support gradual introduction of autonomic
capabilities, the cognitive cycle is implemented in
software. In the remainder of the paper, this software
add-on embedded in network equipments and
executing the cognitive cycle is referred to as the
“cognitive network manager” (CNM).
Network equipments are physically distributed
and the configuration of a given equipment often
interplays with that of other equipment
configurations. So, the representation of the network
context that every CNM makes cannot be limited to
its local point of view. Using a centralized approach
to provide this complete picture is not feasible as it
would not scale and be tolerant to faults. This means
that communication between distributed autonomic
elements is required to exchange relevant
information as input for the decision making
process.
Broadcasting messages throughout the entire
network is not an option and the autonomic network
management system must limit the communications
to a defined range. Considering that knowledge
about an entire network is not necessary to make fast
local decisions either, information exchange is
limited to compartments (subsets of neighbouring
network elements). As a consequence, each CNM
has a situated knowledge corresponding to its
compartment view. Decisions are made locally,
based on information gathered and exchanged
between neighbouring entities in the defined
compartment view.
Because of the variety of capabilities of network
elements, some CNMs may be more complex than
others. These particular CNMs could deal with
higher-level knowledge collected by a set of CNMs
in the specified domain they manage. With this
knowledge, possibly complemented by exchanges
with other domain managers, they could make
global decisions solving problems that standard
CNMs cannot address locally, control and adjust
policies to fit the desired system behaviour, and
learn from previous experience (Figure 1).
CONEMAF: A MODULAR MULTI AGENT FRAMEWORK FOR AUTONOMIC NETWORK MANAGEMENT
225
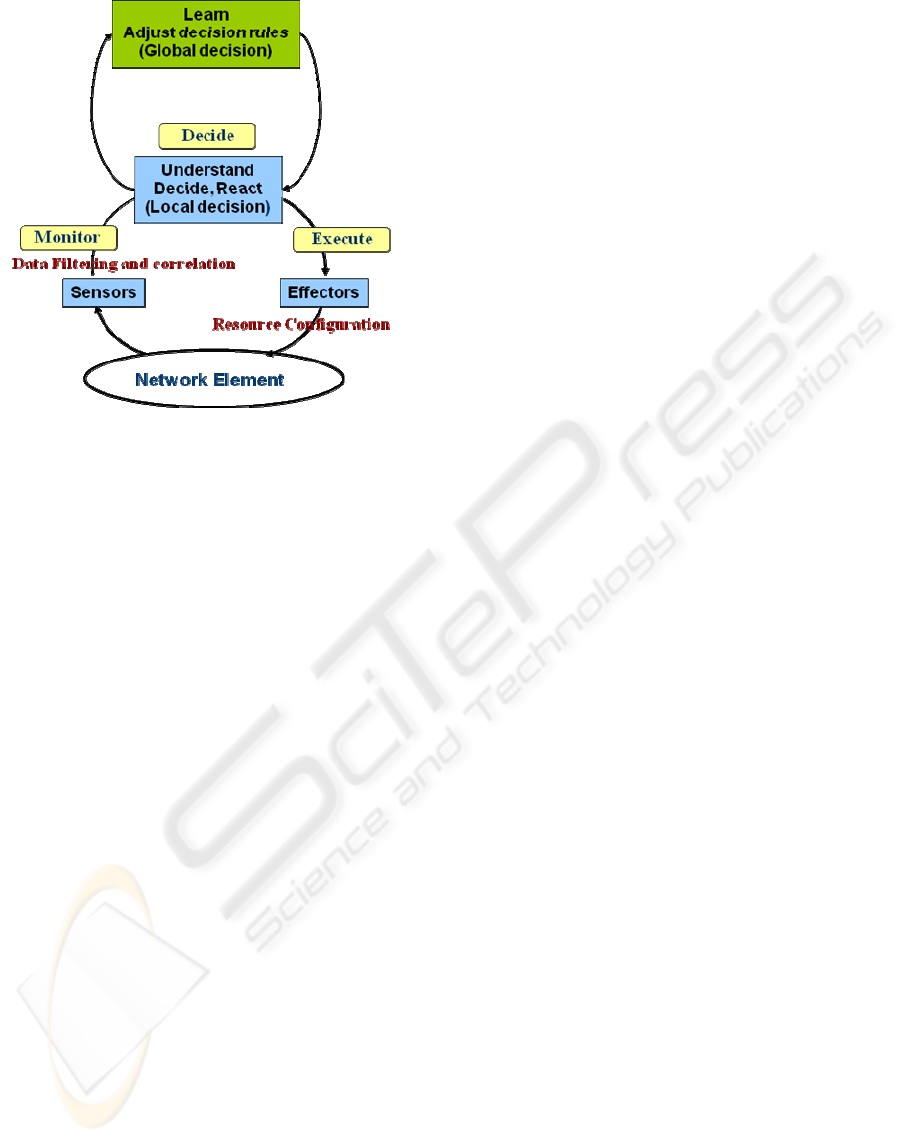
Figure 1: Multi-layered cognition and decision
capabilities.
The autonomic network management
architecture must thus support flexible and dynamic
compartment definition.
2.2 Software Requirements
Implementing the architecture described above leads
naturally towards multi-agent platforms since they
aim to include communication, perception and
action functions (Ferber, 1995). Each CNM is
embedded in a network element and the autonomic
network management framework should provide it
with the following functionalities:
• network topology discovery
• neighbourhood discovery
• semantic communication
• network element control, via services which are
declined to sensors and effectors
• scheduling (in order to plan behaviours
execution).
The multi-agent implementation must satisfy further
requirements. First of all, the autonomic network
management system needs to be fully distributed in
order to scale up to large or constrained networks
and to be fault tolerant. Then, considering that
CNMs are embedded in heterogeneous hardware
devices with sometimes hard constraints implies that
the solution must be lightweight and easily
adaptable.
Moreover, the system must support reasoning
capabilities to make fastdecisions in order to deal
with applications or services that are not tolerant to
delays. This means they must manipulate knowledge
(situation, operator policies). The distribution of
entities implies that knowledge is distributed. As a
consequence, the knowledge representation must be
uniform in order for entities to exchange
understandable information.
Finally, the system must provide communication
functions for entities to cooperate and collaborate.
Modular sensors and effectors that cognitive
network managers will use to gather data and
configure equipments are also necessary.
3 CONEMAF PLATFORM
The CONEMAF platform has been designed to
address the software requirements previously stated.
It is composed of robust baseline COTS, which,
once combined in the CONEMAF framework,
provide the CNMs with the expected capabilities.
Developed in Java, it can be easily integrated in
various network equipments running a JVM (routers,
home gateways, end devices) and allows fully
distributed autonomic management of different types
of networks such as wired or wireless.
3.1 Baseline Technologies
3.1.1 OSGi
Because CNMs aim at being embedded in network
devices where the computational resources are
devoted to routing, they should be designed in such
a way that the required modules are only activated
depending on devices capabilities. OSGi, for Open
Services Gateway initiative (OSGi Alliance, 2009),
is a Java platform providing functionalities for
service-oriented programming. It allows developing
smaller independent modules that can dynamically
provide services to other modules and consume
those that other modules offer. In this framework,
modules, called bundles, can be loaded, started,
replaced or stopped at runtime. Moreover, this
platform allows developing bundles with clear
separation between interfaces and their
implementation in a natural way. To summarize,
OSGi makes programming service-oriented
applications easier and provides high adaptation
capabilities, which is a required property for
integrating autonomic elements in future network
equipments.
Other assets of the OSGi platform are the ease of
bundle version management and, above all, the
plugin deployment facilities. In fact, launching the
OSGi framework is straightforward: some tools like
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
226

PaxRunner (PaxRunner, 2009) ease the management
of bundle provision inside interchangeable OSGi
framework implementations. Managing bundles life
cycle (install, run, stop, uninstall) is also simple.
Another important benefit of the OSGi
technology is that Cisco network equipments already
integrate an implementation of the OSGi platform
(Cisco, 2008). Remote deployment of OSGi bundles
is the only thing to do to integrate the autonomic
network management system in a Cisco piece of
equipment.
3.1.2 Web Ontology Language and Semantic
Web Rule Language
A cognitive network manager needs to have a
“world” representation and capture the technical
know-how in order to work autonomously with
respect to the operator objectives. Therefore, a tool
that allows the network expert to express its
knowledge in a machine-readable way is required.
An ontology is a « shared and common
understanding of a domain that can be
communicated between people and heterogeneous
and distributed systems » (Fensel, 2001). It enables
representing domain background knowledge in a
machine understandable form (Studer, 1998). Using
such a formal model within our distributed
architecture is appropriate. An ontology defines a set
of concepts, properties, relationships, constraints and
axioms that provide rules that govern them.
The Web Ontology Language (OWL) (W3C,
2004) is the W3C standard for ontological
modelling. It has been designed to provide a
common way to process the content of web
information. The OWL standard defines three
increasingly expressive dialects: OWL Lite, OWL
DL and OWL Full. OWL Full contains all the OWL
language constructs but has no computation
guarantees because it introduces too many
possibilities. OWL DL is a sublanguage of OWL
Full and relies mostly on description logics (DL).
OWL DL is computationally decidable and more
appropriate for knowledge representation when
inference is needed. OWL Lite is a subset of OWL
DL and suits well for expressing basic classification
hierarchy and simple constraints. Although
originally defined as an important part of the
semantic Web suite, OWL is emerging as the major
standard for knowledge representation.
However, OWL constructs do not allow the
formalization of rules on top of the ontology.
Among many proposals aiming at enhancing OWL
knowledge bases with rules, the Semantic Web Rule
Language (SWRL) (W3C, 2004) is probably the best
known and most established. SWRL provides the
means to define rules that extends the OWL set of
axioms.
3.1.3 Jess Inference Engine
Cognitive network managers need reasoning
capabilities to make decisions according to policies
defined by network administrators. An inference
engine performs reasoning from declarative facts.
Jess, for Java Expert System Shell (Friedman-Hill,
2003), is a fast and powerful rule engine for the Java
platform, which supports development of rule-based
systems that can be tightly coupled to code entirely
written in Java. Jess has been integrated with several
agent frameworks and other tools like the popular
ontology editor Protégé (Protégé, 2009). Jess, which
supports both forward and backward chaining, has
been integrated in the CONEMAF platform to
provide such reasoning capabilities.
3.2 Modular Framework
CONEMAF is built on top of OSGi and follows the
modular principles that OSGi enables. Software
upgrade, deployment over heterogeneous network
elements are thus facilitated.
3.2.1 Framework Components Overview
Figure 2 represents the different components the
CONEMAF platform is made of from a software
point of view. The core framework is composed of
components that are essential for the cognitive
network manager to play its role. This includes a
scheduler to trigger the execution of behaviours, an
inference engine for decision-making, and a
blackboard, which acts as an organized common
space for information sharing. Topology, discovery
and communication services are also implemented
as modules. The main benefit of the framework
resides in the simplicity of adding, deleting or
changing one of its components. Behaviours and
network element controllers that may be adapted to
the type of device they are embedded in particularly
aim at exploiting such a benefit. All these
components are individually described in the
following section.
3.2.2 Modules Description
Each component of the cognitive network manager
is implemented as a module, called bundle in the
OSGi terminology. The present release of
CONEMAF: A MODULAR MULTI AGENT FRAMEWORK FOR AUTONOMIC NETWORK MANAGEMENT
227
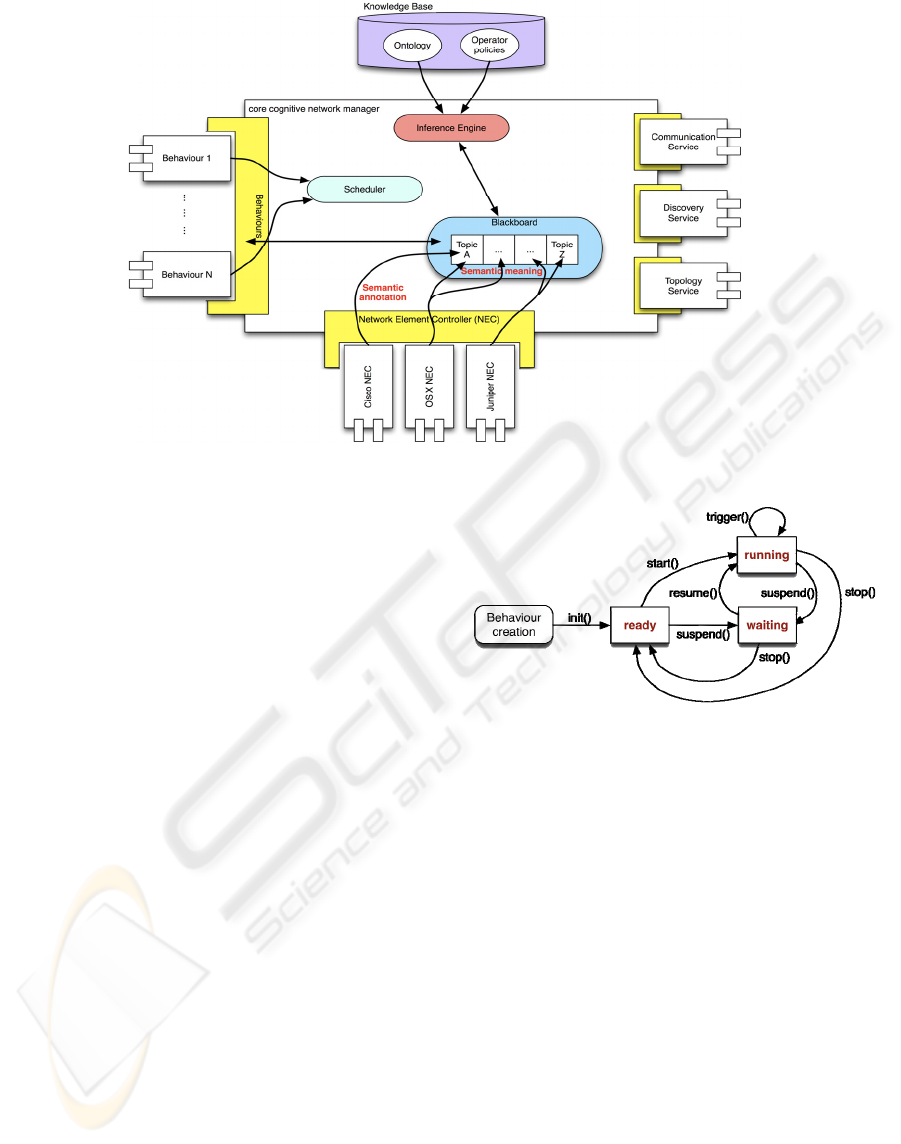
Figure 2: CONEMAF components.
CONEMAF includes a first implementationof the
following modules:
• Topology service: based on a regular exchange
of hello messages, constructs, updates and
exchanges adjacency tables that reflects the
physical network topology
• Discovery service: maintains information
concerning neighbouring cognitive network
managers (IP addresses, network interfaces used
to reach them…)
• Communication service: fundamental service
that provides communication functions with
high-level semantics (communication acts,
content identification)
• Network element controller: gathers network
equipment status and publishes these different
pieces of information (interfaces, routing…) in
the blackboard. It also provides means to enforce
reconfigurations in the network equipment.
• Behaviours: a behaviour realizes tasks or
computations that are inherent to a specific
objective. Two kinds of behaviours have been
developed, differentiated on how often they are
executed:
- one shot: is executed only once
- periodic: is executed at regular intervals.
The execution of behaviours is triggered by the
scheduler. Their life cycle, depicted in Figure 3,
can be controlled.
• Scheduler: schedules the execution of
schedulable components registered beside it
(behaviours basically)
Figure 3: Behaviour life cycle.
• Blackboard: provides writing and reading
functions in a shared space. We have extended
LighTS (Picco G. P., 2005) (Picco G. P., 2001), a
light Java implementation of the Linda model of
tuple spaces (Wells, 2003). The blackboard
contains different topics semantically linked to
concepts of the ontology. Each topic is
implemented as a tuple space
• Inference engine: in charge of making high-level
decisions, it can be considered as the brain of a
cognitive network manager. The ontology and
the operator policies are loaded inside it, so as
declarative facts representing the situation.
Regarding to defined policies, decisions can be
made as rules are triggered. The inference engine
makes decisions that may need additional
information for reconfiguring the network
equipment and delegates these kind of specific
processes to behaviours.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
228
4 AUTONOMIC CONGESTION
MANAGEMENT IN A
DYNAMIC ENVIRONMENT
The purpose of this experiment is to offer an initial
validationof the applicability of CONEMAF to
perform autonomic network management. The
objective of using autonomic management is to
provide faster adaptation of the network to varying
load conditions. This experiment aims to highlight
the use of the framework to overcome congestion
problems in wireless networks, where bandwidth
often fluctuates. In this specific case, CONEMAF
provides proactive route selection on top of the
legacy routing protocol. The experiment has been
carried out with a virtualization tool that emulates
network equipments and links. The same scenario is
run without and with CONEMAF and performances
are compared in both cases.
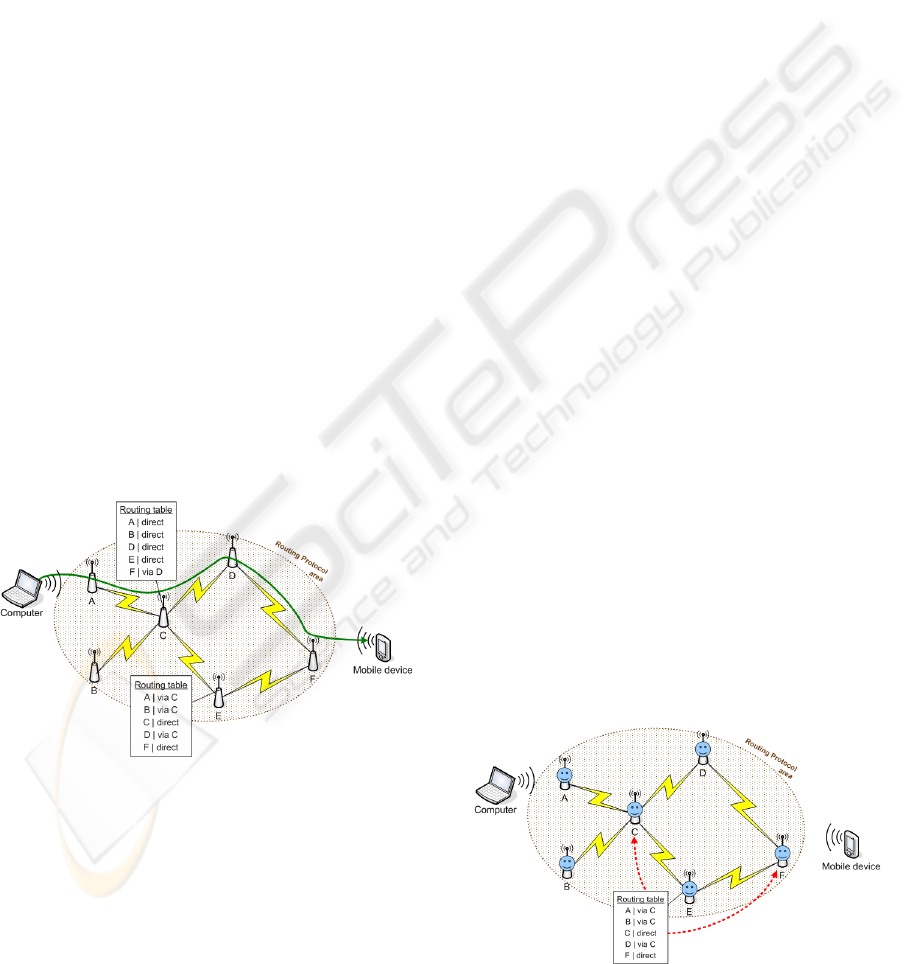
4.1 Initial Situation
Let’s consider the mesh network in Figure 4. It is
composed of five routers and the scenario also
involves two end devices. OSPF (Moy, 1998), one
of the standard Internet routing protocol, is executed
in this mesh network. A video flow is running across
the network from a server to a client. In this context,
the scenario consists in evaluating the visual impact
of different failures or disruptions without and with
CONEMAF cognitive network managers.
Figure 4: Initial situation.
4.2 Without CONEMAF
First of all, without cognitive network managers,
when a link fails on the path from source to
destination, the routing protocol is able to detect the
failure and converges back. The video flow is
affected (stopped) and its diffusion restarts when the
routing protocol has converged (this can be quick).
Then, still without cognitive managers, limiting
bandwidth capacity on a link between source and
destination simulates a link disruption. This is the
most interesting situation because, as there is no link
failure, the routing protocol cannot do anything (it is
not able to detect this disruption). The quality of the
video flow remains affected (e.g., blocks still
appear).
4.3 CONEMAF in Action
Cognitive network managers aim at anticipating
corrective actions to problems that can arise in a
network. This first demonstration using the
framework consists in detecting a link disruption and
reacting to this problem as soon as it occurs by
redirecting the video flow.
To achieve this, a policy defining a threshold for
available bandwidth on network interfaces is
included as a rule in the inference engine. It looks
like this:
(interface ?name … ?availableBW …)
^ (?availableBW <= threshold)
=> (changeRoute ?name)
The network element controller regularly gathers
and publishes information on interfaces (name, state,
available bandwidth…) in the blackboard. These
factual pieces of information concerning every
interface are retrieved by the inference engine and
inserted into it under that form:
(interface <name> <state>
<availableBW> <otherParameters>)
Simple behaviours realize the following actions:
• exchange local routing table with direct
neighbours (Figure 5)
• use received neighbouring routing tables to
compute alternative paths (the algorithm is
illustrated in Figure 7) to reach each destination
contained in the local routing table (Figure 6).
Figure 5: Local routing table exchange between
neighbours.
CONEMAF: A MODULAR MULTI AGENT FRAMEWORK FOR AUTONOMIC NETWORK MANAGEMENT
229
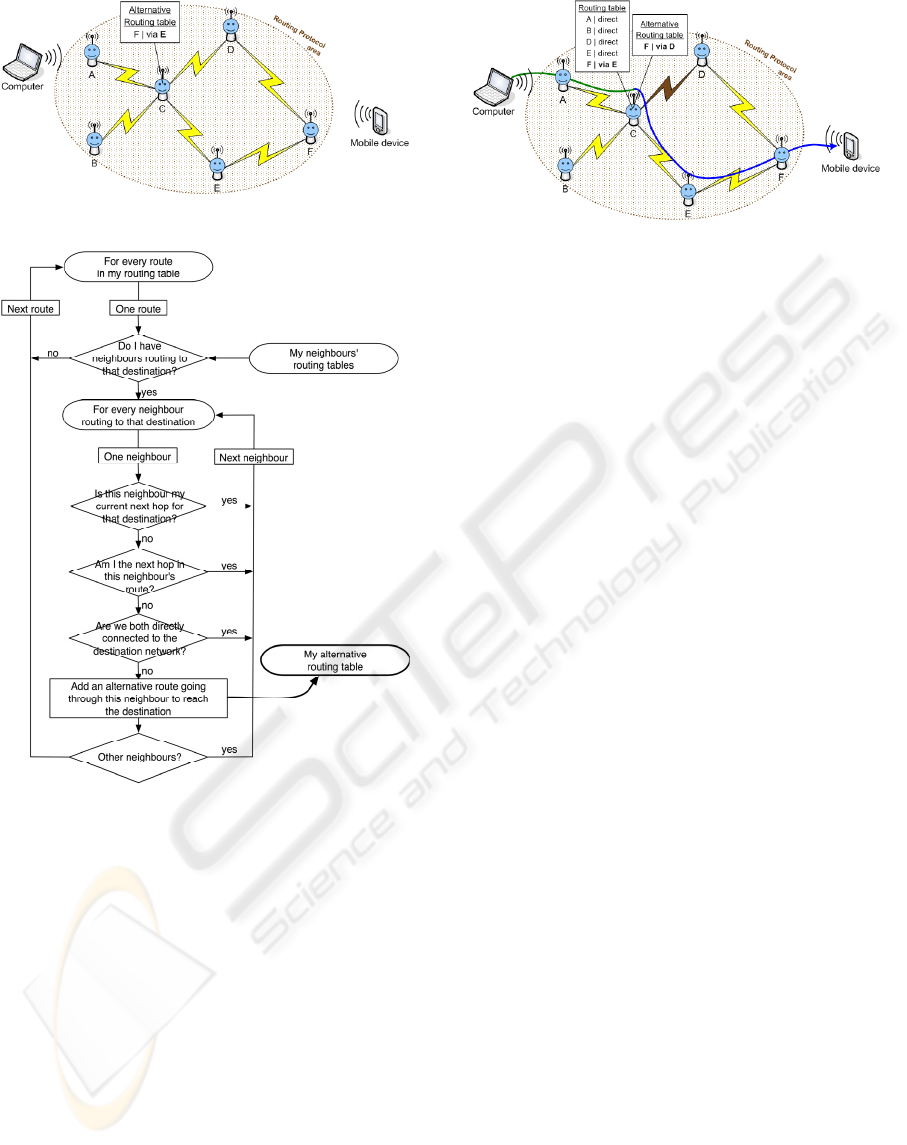
Figure 6: Alternative routing table computing.
Figure 7: Alternative routing table computation algorithm.
When a disruption occurs on a given link and the
defined threshold is reached, the rule inserted in the
inference engine is triggered and a fact is published
in the blackboard topic associated to orders. The
network element controller then reads this order for
changing the route(s) using the relevant interface
(whose name is given in the inference result). It
makes use of alternative routes computed by the
behaviour in charge of this task to select one to be
applied. If existing, this alternative route is enforced
in the network equipment routing table and the flow
is instantaneously redirected (Figure 8).
Enforcing an alternative route is a solution to
face the disruption. Other solutions could be
envisaged and the cognitive network manager would
have to choose the most appropriate according to the
situation. This simple reaction gives quite good
results: even if we can see small pixels for less than
one second, the video remains fluent.
Figure 8: Facing the disruption by redirecting the video
flow.
5 CONCLUSIONS AND FUTURE
WORKS
This paper has presented CONEMAF, a platform
that implements Cognitive Network Managers in
Java. CONEMAF emphasizes autonomous
distributed cognitive network managers that are able
to monitor and act on the network equipment they
are embedded in. They share an ontology that allows
them to understand information they gather and
exchange. Following high-level policies defined by
operators, they can reason, make decisions and
cooperate autonomously.
Based on the OSGi platform, CONEMAF is
made up of easily deployable components and
provides the modularity required to manage
heterogeneous equipments in future converged
networks. The first release has demonstrated
autonomic routing capabilities in a simple use case.
Further work on the ontology and the inference
engine is the next step towards extended autonomic
capabilities. While still paying a particular attention
to the framework modularity, further developments
will then focus on giving the cognitive network
managers learning capabilities to evaluate and adjust
decisions based on their past experiences.
REFERENCES
Agoulmine, N. B. (2006). Challenges for Autonomic
Network Management. First Conference on Modelling
Autonomic Communication Environment (MACE'06).
Cisco. (2008). Cisco OSGi Add-On as Universal
Middleware for Your Applications. Retrieved from
http://www.cisco.com/en/US/prod/collateral/routers/ps
9701/data_sheet_c02_459075.html
Fang, F. R. (2005). Technology Review of Multi-Agent
Systems and Tools. Navy Personnel Research Studies
and Technology.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
230

Fensel, D. (2001). Ontologies: Silver Bullet for Knowledge
Management and Electronic Commerce. Springer
Verlag.
Ferber, J. (1995). Les systèmes multi-agents : Vers une
intelligence collective. Paris, France: InterEditions.
FIPA. (2005). FIPA Specifications. Retrieved from
Foundation for Intelligent Physical Agents:
http://www.fipa.org/specifications/index.html
Friedman-Hill, E. (2003). Jess in action : rule-based
systems in Java. Greenwich, CT, USA: Manning
Publications Co.
Ganek, A. G. (2003). The dawning of the autonomic
computing era. IBM Systems Journal.
Garofalakis, M. R. (2001). Data Mining Meets Network
Management: The NEMESIS Project. Proceedings of
DMKD’2001 http://www.dataspaceweb.net.
Horn, P. (2001). Autonomic computing: IBM's perspective
on the state of Information Technology.
IBM. (2006). An architectural blueprint for autonomic
computing. White paper.
Keller, A. H. (2008). A System Architecture for Evolving
Protocol Stacks. Computer Communications and
Networks, 2008. ICCCN '08 (Invited paper), 1-7.
Kephart, J. C. (2003). The Vision of Autonomic
Computing. IEEE Computer, 36, 41-50.
Lefebvre, J. C. (2005). A Network Management
Framework Using Mobile Agents. Journal of
Computer Science.
Manzalini, A. Z. (2006). Towards Autonomic and
Situation-Aware Communication Services: the
CASCADAS Vision. Proceedings of the IEEE
Workshop on Distributed Intelligent Systems:
Collective Intelligence and Its Applications (DIS’06),
383-388.
Moy, J. (1998). RFC 2328 - OSPF Version 2. Retrieved
from www.ietf.org/rfc: http://www.ietf.org/rfc/
rfc2328.txt
OSGi Alliance. (2009). OSGi - The Dynamic Module
System for Java. Retrieved from http://www.osgi.org
PaxRunner. (2009). Pax Runner. Retrieved from
http://paxrunner.ops4j.org
Picco, G. P. (2001). LighTS. Retrieved from LighTS:
http://lights.sourceforge.net
Picco, G. P. (2005). LighTS: a lightweight, customizable
tuple space supporting context-aware applications.
Proceedings of the 20th ACM symposium on Applied
computing, 413-419.
Protégé. (2009). Protégé. Retrieved from Protégé Home
Page: http://protege.stanford.edu
Ray, P. P. (2008). Distributed Autonomic Management:
An Approach and Experiment towards Managing
Service-Centric Networks. International Conference
on Service Systems and Service Management, 2008, 1-
6.
Ricordel, P.-M. D. (2000). From Analysis to Deployment:
A Multi-agent Platform Survey. Proceedings of the
First International Workshop on Engineering Societies
in the Agent World (ESAW'00), 1972, 93-105.
Sterritt, R. B. (2002). Towards Autonomic Computing:
Effective Event Management. Proceedings of the 27th
Annual NASA Goddard/IEEE Software Engineering
Workshop (SEW-27’02), 40-47.
Strassner, J. A. (2006). FOCALE - A novel autonomic
networking architecture. Latin American Autonomic
Computing Symposium (LAACS).
Strassner, J. K. (2006). Autonomic Systems and
Networks: Theory and Practice. 10th IEEE/IFIP
Network Operations and Management Symposium,
2006. NOMS 2006, 588-588.
Studer, R. B. (1998). Knowledge Engineering: Principles
and Methods. Data Knowledge Engineering, 25, 161-
197.
Tesauro, G. (2007). Reinforcement Learning in
Autonomic Computing: A Manifesto and Case
Studies. IEEE Internet Computing, 22-30.
W3C. (2004). OWL Web Ontology Language Overview.
Retrieved from http://www.w3.org/TR/2004/REC-
owl-features-20040210/#s1.3
W3C. (2004). SWRL: A Semantic Web Rule Language
Combining OWL and RuleML. Retrieved from
http://www.w3.org/Submission/SWRL
Wells, G. C. (2003). Linda implementations in Java for
concurrent systems. Concurrency and Computation:
Practice & Experience.
CONEMAF: A MODULAR MULTI AGENT FRAMEWORK FOR AUTONOMIC NETWORK MANAGEMENT
231
