
PEDAGOGICAL SYSTEM IN VIRTUAL ENVIRONMENTS FOR
HIGH-RISK SITES
Kahina Amokrane and Domitile Lourdeaux
Heudiasyc Laboratory UMR 6599 CNRS, University of Technology of Compi
`
egne
Centre de Recherches de Royallieu, 60200 Compi
`
egne, France
Keywords:
Virtual environment, Intelligent tutoring system, Pedagogical feedback, Industrial risks, SEVESO sites.
Abstract:
Training at high risk sites (SEVESO sites) has many difficulties regarding potential risks, high training costs,
etc. Virtual Environments for Training/Learning (VET/L) are best suited to overcome such difficulties. In this
work, we have developed a collaborative VET/L where a learner with other autonomous virtual agents can
work together to achieve a specific goal. We equipped this environment with an Intelligent Tutoring System,
HERA, allowing to track several learners simultaneously, and to show them the consequences of their errors.
HERA provides relevant feedback to learners, in real time or in a replay mode, thanks to its pedagogical model
and module. This feedback depends on predefined pedagogical rules based on learners’ level, their errors, the
pedagogical goal, etc. In this paper, we present our system’s architecture. Then, we give a detailed description
of the pedagogical model, and we explain the pedagogical module functionalities.
1 INTRODUCTION
The application context of our work concerns risk
management and prevention training at subcontract-
ing companies that intervene at high risk sites. These
companies aim to improve the quality of training and
to reduce the number of accident causes related to hu-
man factors. Training in situ does not allow to re-
produce disruptive situations that enable the acquisi-
tion of necessary skills to manage risks. Virtual Re-
ality (VR) allows the construction of custom simula-
tions adapted to needs (Bukhardt et al., 2006; Mellet-
D’huart et al., 2005), and particularly in the area of
risk prevention (Marc and Gardeux, 2007). However,
few Virtual Environments (VE) take into considera-
tion pedagogical or didactic aspects. This type of VE
promotes learning by 1) allowing to better understand
and analyze the learner’s actions thanks to his trace
and to some performance criteria; 2) providing adap-
tive epistemic feedback related to the learning situa-
tion; and 3) proposing an adaptive scripting by modi-
fying the VE and the conduct of the scenario accord-
ing to the behavior of the learner and to his learning
evolution.
The development of such environments for human
learning in the risk area gives rise to several questions:
how to train learners to react to a risky or unexpected
situation? How to help learners to have an idea about
potential risks? How to enable a trainer to follow sev-
eral learners at the same time? etc. The work pre-
sented in this paper is in the area of using the VR
for training, in particular for the implementation of a
pedagogy dedicated to knowledge acquisition within
a collaborative work environment. Our work aims to
assist trainers following learners, and to help them to
analyze and understand the consequences of learners
actions. This analysis will also assist learners in the
debriefing and replay phase.
The feedback on learning and reflexive activities
is important for the learner (Bukhardt et al., 2006).
The first contribution of our work is to propose to the
trainer and the learner individual activity traces, per-
formance criteria, and especially explanations of the
consequences of these activities. In addition, it aims
to alert the trainer in case of difficulties encountered
by a specific learner. Thus, our work intends to pro-
vide a system able to determine the task realized by
each learner, detect committed errors and produced
risks. The second contribution of our work is to pro-
pose adaptive pedagogical feedback learning related
to the activities of each learner. The third contribution
of our work is to propose a tracking system that allows
to maintain the consistency between the scripting and
the training objectives by generating or inhibiting cer-
tain events. Each scenario allows to learn a particular
training objective or several combined objectives (e.g.
371
Amokrane K. and Lourdeaux D. (2010).
PEDAGOGICAL SYSTEM IN VIRTUAL ENVIRONMENTS FOR HIGH-RISK SITES.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Artificial Intelligence, pages 371-376
DOI: 10.5220/0002736003710376
Copyright
c
SciTePress

procedure, safety standard, etc.). It consists of being
able to script events in the VE related to the initial
scenario, but also according to correct or erroneous
actions of the learner. To propose these contributions,
the scientific difficulties are 1) the lack or weakness
of credible and pedagogical description languages of
human activities and scripting, 2) the lack of recog-
nition systems of learner activities in open environ-
ments such as VE, and consideration of dynamic as-
pects of interaction 3) the lack of generic pedagogical
systems in VET/L.
To overcome these scientific difficulties, we pro-
pose a VET/L equipped with an intelligent tutoring
system called HERA (Helpful agent for safEty leaRn-
ing in virtual environment). In this paper, we discuss
mainly the third difficulty.
2 RELATED WORK
Several systems have been proposed in the literature
that integrate pedagogy and didactic in a VE for train-
ing in order to assist the learner. Most of them are
not generic and propose help (replace a learner in a
task, guide him, etc.) and assistances that do not go
beyond the prescribed procedure (Elliott and Leste,
1999) i.e. for a deviation or an unforeseen event, such
systems do not know what to do. Some systems in-
clude a model of the didactic decision-making process
allowing to produce feedback relevant to the user’s
knowledge (Luengo, 2005). Other systems include a
generic pedagogical model that is still dependent on
the trainer. These systems tend to provide a set of as-
sistances for each erroneous situation, but it is up to
the trainer to choose the most relevant among them
(Buche et al., 2004). Other systems assist the learner
using a set of performance criteria that are provided in
a replay mode (Mellet-D’huart et al., 2005). Most of
these systems penalize, disrupt, and help the learner
at each time, which affects the acquisition of knowl-
edge since the training is not progressive. In addi-
tion, although the presence of risks in several systems
(Buche et al., 2004; Elliott and Leste, 1999) the con-
cept of risk was not well enhanced in these systems.
3 OUR VIRTUAL ENVIRONMENT
In this work, we have developed a VET/L using Vir-
tools, dedicated to knowledge acquisition. During
a training session, each learner performs his train-
ing in front of a PC screen. In this environment, a
learner has to conduct a collaborative work with other
autonomous virtual actors. He is represented by an
avatar in the VE, along with other agents with whom
he is in collaboration. The learner can manipulate his
avatar (displacement, changing viewpoint, etc.) us-
ing a mouse and a keyboard. To realize an action,
he can click on the target object and select from the
menu the action he wants (Figure1). The VE is adap-
tive to learners training thanks to the integration of
our intelligent tutoring system HERA. In addition to
HERA, the environment is equipped with an onto-
logical knowledge-based system called COLOMBO
(Amokrane et al., 2008a).
4 HERA ARCHITECTURE
HERA consists of five models representing the
knowledge containers, and of five modules represent-
ing the processes that exchange, analyze, and register
knowledge.
4.1 HERA Models
In addition to the pedagogical model (section 5),
HERA contains the following models:
4.1.1 Activity Model
It contains a detailed description of the activity that
learners must perform during the training. To this
end, we have developed an activity description lan-
guage called HAWAI-DL. HAWAI-DL provides a for-
malism to represent the hierarchical description of
procedure tasks described by experts interviewed by
ergonomists. In addition, it can describe “periph-
eral” tasks called “hyperonymous tasks”. and toler-
ated deviations called “BTCU tasks”(Amokrane et al.,
2008b; Edward et al., 2008).
4.1.2 Errors Model
It contains a generic classification of error types that
may be committed by learners. This classification
consists, first, of the errors classified by Hollnagel
(Hollnagel, 1993). Moreover, we have added the fol-
lowing error types: 1) task-related errors (precondi-
tion, post-condition and constructor errors); 2) target
object and action errors ; 3) role errors ; 4) subjec-
tive errors; and 5) BTCU errors. (Amokrane et al.,
2008b).
4.1.3 Risks Model
It is intended to describe all the risks to which the
learner’s errors may give rise. It consists of the fol-
lowing main concepts: risk, BTCU task, hyperony-
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
372

mous task and environmental condition. These con-
cepts allow to describe the causal relationships be-
tween human errors and risks as well as risks prop-
agation using a Bayesian network. In order to define
these relationships, we interpret the risk analysis sce-
narios realized at the INERIS
1
. (Amokrane and Lour-
deaux, 2009).
4.1.4 Learner Trace
It is used to preserve the “activity trace” of the learner
(what the learner has done), the errors made, the
causes and consequences of the errors, as well as the
risks produced.
4.2 HERA Modules
In addition to the pedagogical module (section 6),
HERA contains the following modules:
• Interface module that acts as an intermediary be-
tween the exterior (VE and COLOMBO) and the
other modules.
• Recognition module that determines what the
learner is supposed to be doing, according to the
observable actions and effects (“print trace”), the
activity model and errors model, based on plan-
recognition techniques.
• Learner module that produces the “activity
trace”
˙
It allows the task plan realized by the learner
to be determined from among all the candidate
task plans provided by the recognition module us-
ing formal approach of plan recognition (heuris-
tics).
• Risks module that determines the risks resulting
from the learner’s errors and their consequences
in real time according to the risks model. In ad-
dition, it calculates the probability of risks using
Bayesian network.
5 PEDAGOGICAL MODEL
In addition to the four models presented previously,
HERA contains a pedagogical model that allows to
determine why, how and when to intervene to assist
learners and to help the trainer. This model consists
principally of:
5.1 Pedagogical Goal
It represents the “why” of a work session. These goals
are determined according to the work environment
1
Industrial Environment and Risk National Institute
and in situ observations and to interviews conducted
by ergonomists of the Paris Descartes University and
by risk analysis experts of INERIS. We distinguish
several pedagogical goals such as: take into account
risks by type (chemical, nuclear, etc.), take human re-
lations into account, etc.
5.2 Pedagogical Situation
In order to allow a progressive training, we define
for each pedagogical goal the situations in which the
learner will be involved allowing him to be evalu-
ated during a training session. In general, pedagog-
ical situations represent BTCU tasks, hypernymous
tasks, etc. For example, in the “dangerous substances
lading” scenario, if the learner does not realize the
BTCU task “accompany valve”, a leak may be pro-
duced. Thus, this task represents a pedagogical sit-
uation whose pedagogical goal is to “take risks into
account”.
5.3 Environmental Conditions
In order to allow the trainer to control a training
session and to verify the knowledge acquired by a
learner, we added the environmental conditions to the
pedagogical model. These conditions represent the
world state (states of the environment’s objects). They
can be the favorable pre-conditions of tasks, for ex-
ample “to free a bolt”, it is preferable that the “bolt
be seized up”. They can also be triggering conditions
of a risk, for example, if the learner does not “accom-
pany the valve”, and “its spring is tired”, then a leak
will be triggered. On the other hand, they play a role
in the triggering of risks due to learner’s errors.
5.4 Learner’s Level
To make the training system adaptive and personal-
ized to the knowledge of each learner, we consider
five levels of learners: novice, intermediate novice,
intermediate expert, expert and very expert. The mass
of knowledge to be acquired increases as the learner’s
level evolves. The pedagogical goals, the relevant
pedagogical situations, the environmental conditions
as well as the learner’s level are initialized by the
trainer at the beginning of a training session.
5.5 Situated, Adaptive and Pedagogical
Feedback
They represent the feedback that the system provides
to the learner and trainer in real time or in replay
mode. We distinguish several types of feedback:
PEDAGOGICAL SYSTEM IN VIRTUAL ENVIRONMENTS FOR HIGH-RISK SITES
373

• Scale modification (enlarging some parts to get a
better view, etc.).
• Reification, i.e. show the learner some concepts
or abstractions in a concrete and intelligible form
(emanation of colourless gas, invisible particles to
naked eye, etc.).
• Restrictions to limit the learners actions, such as
stop messages sent to the novice learner in real
time when he commits a sever error that could
lead to a risk. (Figure 1).
• Superposition of information:
– Comments and argued explanations about the
consequences of learner actions. These mes-
sages are displayed, in real time, to the learner
on the VE (Figure 1) and to the trainer screen
(Figure 3). The messages are displayed also in
replay mode on the learner’s screen, e.g. if the
learner uses a wrong tool, the system displays
to the learner as an explanation: “This is not the
right tool”.
– Warning and attention messages sent to attract
the attention of the learner, e.g. when an in-
termediate novice learner commits an error that
causes or could cause a risk, a warning or atten-
tion message, respectively, is sent (Figure 1).
Figure 1: Object menu, Textual feedback and Performance
criteria in the VE.
5.6 Situated and Adaptive Scripting
Changes and adjustments of the scripting (scenario
and behaviors of virtual actors): the integration of
a situated and adaptive scripting allows to adapt to
the learner’s profile and to the objectives of using a
VE. It also allows to control and modify the scenario
progress in real time, and to guide the activity and
the behaviour of virtual autonomous agents in order
to analyze the learner’s behaviour and to enrich his
learning profile. These changes correspond to:
• Triggering of risks due to learner errors in real
time (Figure 2), e.g. triggering sparks if the
learner uses a non-ATEX tool in an ATEX zone.
• Modifications of the scenario by sending disrup-
tive elements in order to know the reaction of the
learner in front of unforeseen situations.
5.7 Performance Criteria
To assess learners, several criteria may be used. Since
our system is dedicated to SEVESO sites and to orga-
nizations interested in human relations, we have pro-
posed the following criteria to the learner (Figure 2)
and to the trainer (Figure 3):
Figure 2: Fire triggering and Performance criteria.
Risk. This criterion must be respected by learners
going to work in SEVESO sites, i.e. a learner
must have a good level regarding this criterion to
be able to work in situ without any danger. The
evaluation of this criterion is based on risks sever-
ity that is calculated by the risks module.
Errors. Statistical studies have demonstrated that
good operators tend to make errors before reach-
ing the optimal solution. This assumed that the
ability to detect and correct errors is a principal
component of an effective solution. Based on
this assumption, learners in our system, especially
novices, are not penalized for each error commit-
ted, unless it persists or it was a sever error. The
evaluation of this criterion can be expanded across
several sessions in order to verify the evolution of
the learner concerning a specific type of errors.
Productivity. It is an important aspect for industrials
since it represents the amount and the quality of
products.
Time. Learners must respect the constraint of time in
most work situations. In the “industrial mainte-
nance scenario”, each session has a specific dura-
tion, and in other scenarios dealing with risks, the
time must be respected especially when reacting
to a risk situation. For example, in the scenario of
“dangerous substances lading”, we take into ac-
count the period spent by the learner between the
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
374
moment where a risk is triggered and the moment
where the learner reacts to this unexpected situa-
tion. This criterion is calculated as follows:
TC (time criterion) = session duration / time esti-
mated by the expert for this session.
TC = spent time to react to a risk / time estimated
by the expert.
These criteria can be exploited during a training
session or in replay mode, and displayed to learners
and to the trainer. Performance criteria are mostly
useful in replay mode allowing learners to better see
the deviations they made without being disturbed dur-
ing the training session. They are represented by
icons that change colors depending on the severity of
criteria. For example, the icon of the risk criterion is
in green if there is no risk at all (probability 0), in yel-
low if the risk probability is small ] 0, 0.3], or in red
if the probability is higher than 0.6.
Figure 3: Trainer interface.
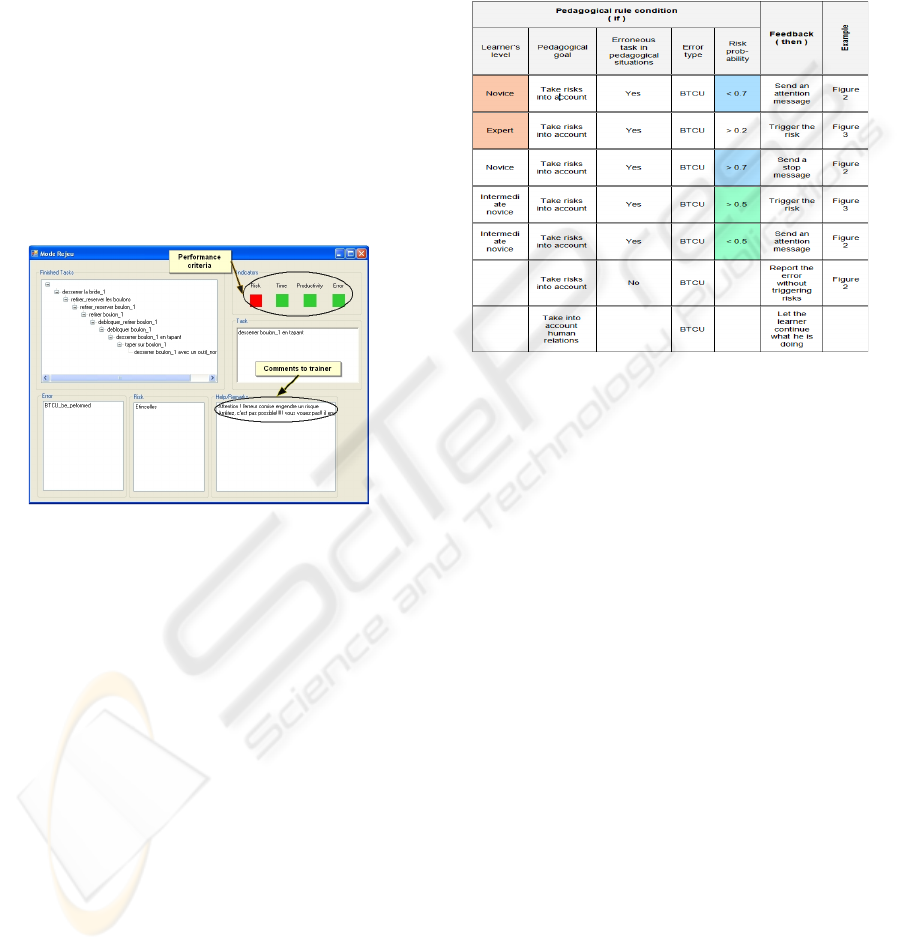
5.8 Pedagogical Rules
To enable our system to reason, we have defined a set
of pedagogical rules allowing to determine pertinent
feedback. Table 1 shows some examples of pedagog-
ical rules. The description of these rules consists of
the following concepts:
• Type of errors committed by the learner (deter-
mined by the tracking system).
• Learner’s level: the choice of feedback is related
to the learner’s level, which allows to have an
adaptive training.
• Risk probability: it is used in the cases where
there are BTCU errors or omission errors of other
safety-related tasks.
• Pedagogical goal and situation: for the choice of
feedback, the pedagogical rules allow to select
some aspects rather than others to highlight cer-
tain consequences of learners actions while main-
taining a pedagogical and scenaristic coherence.
This allows to avoid overburdening the learner,
i.e. to penalize him on-line only for the errors re-
lated to the selected pedagogical goals. For other
errors, their consequences will be recorded in the
learner’s trace to be shown and explained in replay
mode.
Table 1: Examples of pedagogical rules.
6 PEDAGOGICAL MODULE
It is the module that supports the decision of feedback
to be sent to the learner. For each error message re-
ceived from the learner module, this module checks
the error type. If the error type is BTCU, an omission
of a safety-related task, or a subjective viewpoint er-
ror, this module waits a message from the risks mod-
ule to know about the produced risk and its probabil-
ity. Then, it checks the learner’s level, the pedagog-
ical goal and situations selected by the trainer at the
beginning of the training session. According to these
data, the pedagogical module applies the relevant ped-
agogical rule to determine the appropriate feedback.
If the feedback is in real time, it sends a message to
the virtual environment and to the trainer, otherwise,
it records it to be used during the replay mode.
7 CONCLUSIONS
In our work, we have developed a collaborative
VET/L dedicated to industrials dealing with SEVESO
sites and human relations. We have three work scenar-
ios: pipe substitution, lading of dangerous substances,
industrial maintenance. In this VET/L, a learner with
other autonomous virtual agents can work together
to achieve a specific goal. We equipped this envi-
PEDAGOGICAL SYSTEM IN VIRTUAL ENVIRONMENTS FOR HIGH-RISK SITES
375

Figure 4: Data exchange between learner, pedagogical and
risks modules.
ronment with an Intelligent Turning System, called
HERA, allowing to track several learners simultane-
ously.
HERA allows to determine what the learner is do-
ing and to detect committed errors and produced risks.
Thanks to the pedagogical module and model, HERA
provides the necessary feedback to help learners, to
draw their attention, to warn or to stop them, and to
show them the consequences of their errors; and it
allows the trainer to analyze and understand the con-
sequences of learners’ actions on the organizational,
technical, and human systems. HERA’s pedagogical
model consists mainly of a set of rules that allow to
determine the appropriate feedback. These rules are
based principally on the learner’s level, pedagogical
goals, pedagogical situations and environmental con-
ditions.The feedback sent to learners can be in form
of: 1) situated, adaptive and pedagogical feedback ;
2) situated and adaptive scripting; 3) performance cri-
teria. Our system is personalized and adaptive to the
learner’s level. Thus, the feedback varies according to
the learner’s level in order, for example, not to disturb
novices , to penalize experts, etc.
Till now, we have implemented the generic brick
of our system. A preliminary evaluation has been
done to validate the pedagogical model concepts used
to describe the pedagogical rules. In the future we in-
tend to:evaluate the whole system and the feedback
impact over learners and trainers and mprove the sys-
tem according to industrials’ needs.
ACKNOWLEDGEMENTS
This work is part of V3S project(Virtual Reality
for Safe Seveso Substractors). The partners of the
project are: UTC/Heudiasyc UMR6599, INERIS,
Paris Descartes University, CEA-LIST, EMISSIVE,
EBTRANS, CICR, SI-GROUP, TICN and APTH.
We want to thank M. Sbaouni and M. Fraslin who
developed the virtual environment. We thank J.M.
Burkhardt and S. Couix for their contribution to the
design of HAWAI-DL and R. Perney who imple-
mented Visual HAWAI. We would like to thank A.
Ben-Ayed who built the activity model. Finally,
thanks are due to J. Marc for his remarks and expla-
nations.
REFERENCES
Amokrane, K. and Lourdeaux, D. (2009). Virtual Reality
Contribution to Training and Risk Prevention. In Pro-
ceedings of the International Conference of Artificial
Intelligence (ICAI’09), Las Vegas, Nevada, USA.
Amokrane, K., Lourdeaux, D., and Burkhardt, J. (2008a).
Learning and training in virtual environment for risk.
In Proceedings of 20th IEEE Int’l Conference on Tools
with Artificial Intelligence, Dayton, Ohio, USA.
Amokrane, K., Lourdeaux, D., and Burkhardts, J. (2008b).
Learner Behavior Tracking in a Virtual Environment.
In Proceedings of Virtual Reality International Con-
ference, Laval, France.
Buche, C., Querrec, R., De Loor, P., and Chevaillier, P.
(2004). MASCARET: A Pedagogical Multi-Agent
System for Virtual Environment for Training. Inter-
national Journal of Distance Education Technologies
(JDET), pages 41–61.
Bukhardt, J., Lourdeaux, D., and Mellet-d’Huart, D. (2006).
Le trait de la Ralit Virtuelle, Les applications de la
Ralit Virtuelle, volume 4, chapter La conception des
environnements virtuels pour l’apprentissage, pages
43–103. Presses de l’Ecole des Mine.
Edward, L., Lourdeaux, D., Lenne, D., Barthes, J., and
Burkhardt, J. (2008). Modelling autonomous virtual
agent behaviours in a virtual environment for risk. In
International Conference on Intelligent Virtual Envi-
ronments and Virtual Agent, Nanjing, China.
Elliott, C. Rickel, J. and Leste, J. (1999). Pedagogical
Agents and Active Computing: An Exploratory Syn-
thesis. In Artificial Intelligence Today: Recent Trends
and Developments journal.
Hollnagel, E. (1993). The phenotype of erroneous ac-
tions. International Journal of Man-Machine Studies,
39(1):1–32.
Luengo, V. (2005). Design of adaptive feedback in a web
educational system. In Workshop on Adaptive Sys-
tems for Web-Based Education: Tools and Reusabil-
ity, Amsterdam. 12th International Conference on Ar-
tificial Intelligence in Education.
Marc, J. and Gardeux, F. (2007). Contribution of a Vir-
tual Reality environment dedicated to chemical risk
prevention training. In Proceedings of the 9th Virtual
Reality International Conference, pages 45–53.
Mellet-D’huart, D., Michel, G., Steib, D.and Dutilleul, B.,
Paugam, B., and Dasse Courtois, R. (2005). Usages de
la ralit virtuelle en formation professionnelle d’adultes
: Entre tradition et innovation. In First International
VR-Learning Seminar, Laval, France.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
376
