
MODELLING USER BEHAVIOUR WHILE DRIVING AN
INTELLIGENT WHEELCHAIR
Carsten Fischer, Shi Hui, Cui Jian
SFB/TR8 Spatial Cognition, University of Bremen, Bremen, Germany
Frank Schafmeister, Nils Menrad, Nicole v. Steinb
¨
uchel
Medizinische Psychologie und Medizinische Soziologie, Georg-August-University, G
¨
ottingen, Germany
Kerstin Schill, Bernd Krieg-Br
¨
uckner
SFB/TR8 Spatial Cognition, University of Bremen; DFKI, Bremen,Germany
Keywords:
User modelling, Service robot, Empirical study, Safety assistant, Intelligent wheelchair.
Abstract:
This paper reports on our user modelling work based on an empirical study of users’ behaviour while driving
a power wheelchair with a safety assistant. The focus was on persons with visual perceptional deficits, who
show deficits to control a power wheelchair safely if no additional assistance system is available. Our major
concern is to identify users’ behavioural patterns which lead to the intervention of the safety assistant, although
the empirical study itself covers many different research aspects. The goal of the current work is twofold: to
adapt the safety assistance for users with hemianopsia who lost one half of their visual field and to improve
their navigation skill in narrow space via suitable interaction.
1 MOTIVATION
The major goal of intelligent living assistance systems
is to extend an independent and self-consistent life
of persons with physical or cognitive deficits, or of
elderly people, thus enhancing their life quality and
reducing their dependency on personal health care
(Nehmer et al., 2006). An intelligent living assistant
should meet several requirements, for example, to be
personalized to the user’s needs, adaptive to the user’s
actions and environment, anticipating the user’s de-
sires. In addition, new forms of interaction are indis-
pensable for an intelligent living assistant to compen-
sate for users’ deficits and to extend their activities
(Riva, 2005; Morganti and Riva, 2005). Therefore,
the focus of technology research should be on sup-
porting people to cope with their requirements in an
effective and transparent way, along with the develop-
ment of specific new technologies. This requires the
identification of users’ characteristics (Morganti and
Riva, 2005), especially, modelling users’ behaviour
plays an important role in developing intelligent liv-
ing assistance systems like therapy robots (Lee et al.,
2004; Burgar et al., 2000).
Empirical studies of intelligent living assistance
robots with real users have rarely been reported in
the literature. To date several empirical studies on
human-robot interaction have been published (Kanda
et al., 2006). However, to carry out an user based
study with a living assistant, additional conditions
should be taken into consideration. For example, it
is necessary to identify potential user groups based
on medical, cognitive, sensory-motor and epidemio-
logical criteria. The definition of application scenar-
ios may provide us with exemplary views of their ap-
plications (Hansen et al., 2006), but empirical studies
can help us to identify users’ behaviour while carrying
out pre-defined activities, and can thus be used to im-
prove important features of intelligent assistance sys-
tems such as personalization, adaptivity, acceptance
and feasibility.
Our main concern in the current work is on the
evaluation of a power wheelchair with a safety as-
sistant, which has been developed in our institute
(Lankenau and R
¨
ofer, 2001; Krieg-Br
¨
uckner et al.,
pear), and on the identification of users’ behavioural
patterns directly before the interventions of the safety
assistant. The goal is to find out whether patients with
hemianopsia, neglect and with motor deficits, are able
to drive a power wheelchair equipped with a safety as-
330
Fischer C., Hui S., Jian C., Schafmeister F., Menrad N., Steinbüchel N., Schill K. and Krieg-Brückner B. (2010).
MODELLING USER BEHAVIOUR WHILE DRIVING AN INTELLIGENT WHEELCHAIR.
In Proceedings of the Third International Conference on Health Informatics, pages 330-336
DOI: 10.5220/0002747803300336
Copyright
c
SciTePress
sistant in their daily living condition, who would oth-
erwise not be able to drive a wheelchair at all. The
aim is also to adapt the safety assistant for supporting
such users more intelligently.
This paper is structured as follows: We begin in
Section 2 with an introduction to the wheelchair and
the empirical study. The data analysis consists of two
major steps: pre-processing and qualification, and is
discussed in Section 3. Based on the analysis, we de-
velop several user behaviour patterns focused on ob-
stacle avoidance in Section 4. Before concluding, we
discuss some exceptional situations and possible ap-
plications of these behaviour patterns in Section 5.
2 DO WHEELCHAIR USERS
NEED SAFETY ASSISTANCE:
AN EMPIRICAL STUDY
Rolland (Lankenau and R
¨
ofer, 2001) is an intel-
ligent wheelchair that is equipped with two laser
range sensors on the front and back side, wheel en-
coders recording the speed and direction, and an
onboard computer as extensions of a commercial
power wheelchair. Several assistance functions have
been developed for Rolland. Several similar anti-
collision and guidance systems implemented on pow-
ered wheelchairs and walkers have been reported in
the literature (Dutta and Fernie, 2005; Montesano
et al., 2006; Cortes et al., 2008; R
¨
ofer et al., 2009).
Another approach is proposed by Kulyukin et al who
set up a guidance assistance system which requires
an intelligent environment embedded with inexpen-
sive sensors (Kulyukin et al., 2008).
This work focuses on the safety assistant, which
monitors the surrounding environment using sensor
data gathered by the equipped laser scanners and
brakes in time if an obstacle is dangerously close
to the wheelchair. The user commands are passed
via joystick to the safety assistant and, if no ob-
stacle is inside a predefined safety zone around the
wheelchair, the commands are passed unaltered to
the actuators as target translational and rotational
speeds. If an obstacle is detected inside the safety
zone and the wheelchair is exceeding a safety speed
limit with respect to the remaining distance to the ob-
stacle, the current driving speed and the intended user
commands, the safety assistant reduces the speed of
the wheelchair and brings it to a standstill if neces-
sary. Thus the safety assistant prevents the wheelchair
driver from collisions causing severe injuries or dam-
ages. On the other hand the safety assistant does not
affect the user commands in obstacle free areas attain-
ing a smooth driving behaviour.
Presently, a large group of users with specific
physical and cognitive disabilities, such as hemianop-
sia patients suffering from the loss of one side of
their visual field, are often not allowed to drive power
wheelchairs for safety reasons. In this section we re-
port an empirical study aimed at answering the ques-
tion: “How does the safety assistant support per-
sons suffering from hemianopsia to drive a power
wheelchair?”.
The empirical study took about 4 weeks, in close
cooperation with the Department of Medical Psychol-
ogy at the University of G
¨
ottingen and the St. Mau-
ritius Therapy Clinic Meerbusch. Twelve participants
with different physical and cognitive deficits took part
in the study. One participant in this group suffered
from dementia, three from cerebral palsy; another
three participants suffered from a visual neglect. Five
participants suffered from hemianopsia, but it turned
out that one of them had severe comorbidities. There-
fore we only included test data from four participants
with hemianopsia. Prior to the test runs every partici-
pant had up to five training sessions of 30 to 45 min-
utes each to get accustomed to a power wheelchair
with or without additional safety assistant.
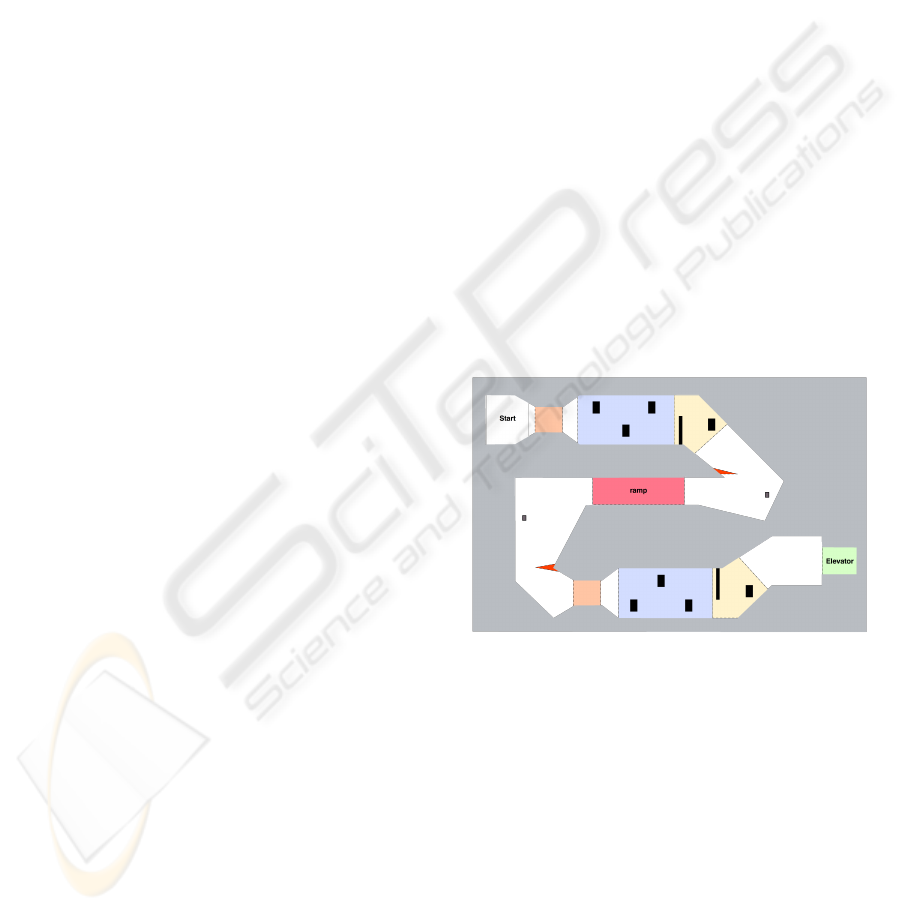
Figure 1: Plan of the test course.
The test course (see Fig. 1) was 8m wide, 14m
long, and had a stretch of about 35m. The whole
course was delimited by flexible partitions of 80cm
height simulating a long corridor. In the test course
different types of obstacles were arranged. There
were left-right combinations with alternating obsta-
cles of different height, separate low obstacles with
a height of 20cm, and higher obstacles to block the
drivers view onto the following obstacles. In addition,
a wheelchair ramp was placed in the middle of the
course. Thus the obstacle configurations contained
several critical situations for a wheelchair user with
a restricted visual field. Furthermore, the course was
constructed symmetrically, such that it provided the
MODELLING USER BEHAVIOUR WHILE DRIVING AN INTELLIGENT WHEELCHAIR
331
same conditions for the subjects with hemianopsia on
the left or on the right side. The participants were
asked to drive through the test course up to a dead
end representing a narrow elevator. After they had
reached this dead end they had to turn the wheelchair
and return to the starting point.
3 DATA ANALYSIS
3.1 Pre-processing
During the test runs we recorded several wheelchair
data such as the wheelchair translational speeds (de-
noted as OdoSpeedTranslX) and rotational speeds
(i.e. the speed of directional changes, denoted as
OdoSpeedRotation), as well as the joystick com-
mands, including the intended speed and direc-
tion denoted as JoystickSpeed and JoystickDirec-
tion. Furthermore, we recorded the safety speed limit
(MaxSafeSpeed) described in Section 2. Every test
run was also documented with six video cameras
recording the test process from different points of
view, to support the analysis of the driving behaviour
of the participants.
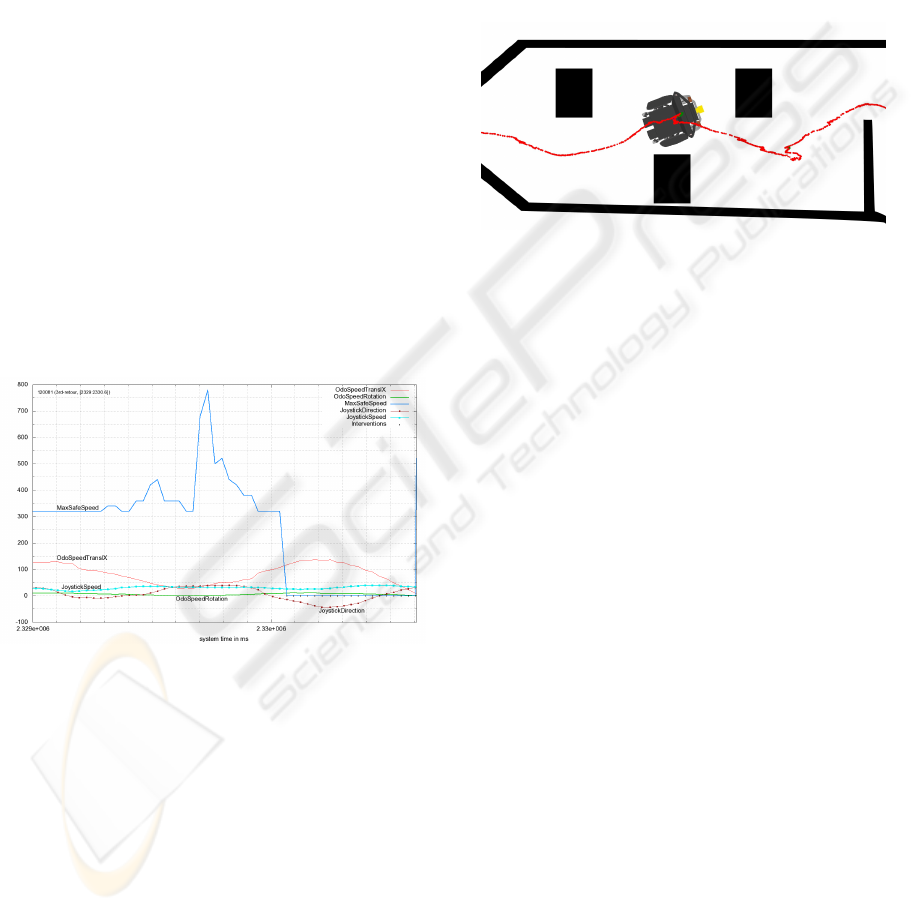
Figure 2: A sample of safety relevant situations.
Persons with hemianopsia are supposed to have
problems identifying obstacles on their blind or not
perceiving side while driving a power wheelchair.
The analysis of the recorded wheelchair data confirms
that participants with hemianopsia had a higher occur-
rence of safety assistant interventions when passing
narrow passages or obstacle configurations with alter-
nately left and right positioned obstacles. Moreover,
the interventions are concentrated at locations where
participants passed obstacles positioned on the deficit
side. For this reason we decide to use such situations
for our analysis purpose.
Figure 2 shows a sample situation, in which the
odometric data recorded the behaviour of a participant
with hemianopsia on the left side continuously. The
visualized odometric data exhibits that the wheelchair
speed changes from 125 to 30, and from 30 to 120 di-
rectly before the intervention. In the whole time there
is only a slight rotation speed toward the left. The joy-
stick direction changes slightly to the right, and again
to the left. Directly before the intervention the joy-
stick direction is changed to the right again. A global
view of the situation is presented in Figure 3, where
the wheelchair is stopped by the safety assistant.
Figure 3: A participant drives the wheelchair through a
right-left-right obstacle combination while having problems
to pass the second obstacle on the hemianoptic side.
3.2 An Approach to Data Abstraction
Usually, humans explain, perceive and process spa-
tial situations in a qualitative manner, which does
not directly mirror the actual measures in real life.
In Artificial Intelligence, such mental conceptualiza-
tions of space are formalized and modeled in the sub-
field of qualitative spatial representation and reason-
ing. This kind of abstraction can make valuable pre-
dictions about human spatial behavior (Cohn et al.,
1997; Freksa, 1992; Shi and Krieg-Br
¨
uckner, 2008).
The abstraction of the empirical data in the present
work has two additional reasons: to enable a qualita-
tive analysis of the safety relevant situations, and to
identify and specify users’ behaviour patterns.
The recorded wheelchair’s rotation speed has val-
ues between −30 and 30 in millimeters per sec-
ond, and the direction given via the joystick be-
tween −180
◦
and 179
◦
, where the positive values
represent the left side and negative values the right
side. We distinguish them by four qualitative values:
front/back for forward/backward movements or com-
mands, deficit or normal for any rotation or command
toward the subject’s deficit or normal side, respec-
tively. If the subject’s deficit side is on the left, then
the rotation speed −20, for example, is interpreted as
normal, or the direction 50 as deficit. Rotation speed
ranging from −5 to 5 or direction from −10 and 10 is
interpreted as front, and the direction from 170 to 179
or from −180 to −170 as back.
HEALTHINF 2010 - International Conference on Health Informatics
332
Furthermore, four qualitative values have been
introduced to interpret speeds, i.e., standStill,
slowSpeed, midSpeed and fastSpeed. The transla-
tional speed ranges from −400 to 400 millimeters per
second, the speed given via the joystick from −64 to
63, and the maximal safety speed between −3000 and
3000 millimeters per second.
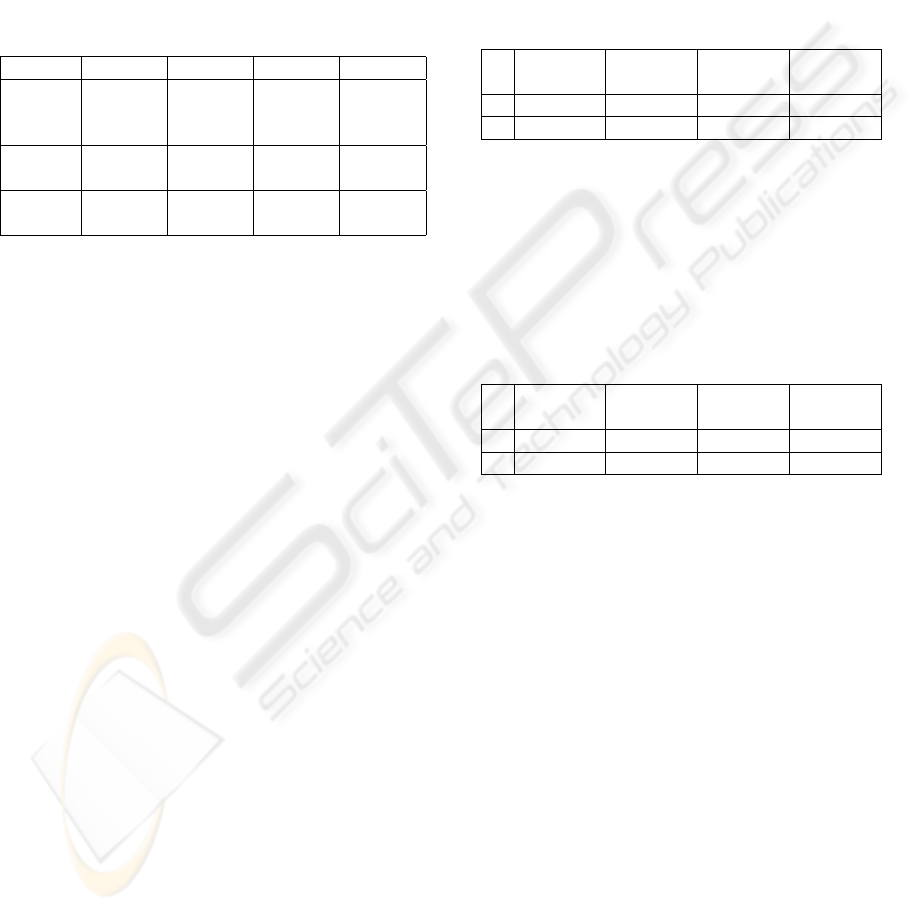
Table 1 contains the mapping between the ranges
of metric speed data and their qualitative correspond-
ings.
Table 1: Abstraction of the metric speeds.
Abstract. standStill slowSpeed midSpeed fastSpeed
Wheel-
chair
speed
(0, 20) (20, 100) (100,
200)
(200,
400)
Joystick
speed
(0, 4) (4, 16) (16, 32) (32, 63)
MaxSafe
Speed
(0, 50) (50, 500) (500,
1000)
(1000,
3000)
We decided on these qualitative representations,
because an abstraction with finer granularity, for ex-
ample, with more qualitative directions or speeds, did
not deliver more information about safety relevant be-
haviour, but increased the complexity of the mod-
elling process. On the other hand, it was impossible
to distinguish any meaningful patterns with a coarser
abstraction.
4 MODELLING USERS’
BEHAVIOUR
4.1 Safety Relevant Situations
A set of situations, which lead to the intervention
of the safety assistant, called safety relevant situa-
tion, has been selected by analyzing the odometric
data. As stated in the last subsection, we first in-
terpret these situations qualitatively to enable pattern
identification. Each situation contains two safety rel-
evant points: a critical one and an unsafe one. At
the critical point, the user still has enough time to
pass an obstacle located at his/her deficit side with-
out the intervention of the safety assistant. However,
if an unsafe point is reached, the intervention is indis-
pensable to avoid the collision. At a critical or unsafe
point the safety speed limit has a value of midSpeed
or slowSpeed respectively.
Table 2 shows two samples of critical points de-
tected in test runs of a subject with hemianopsia on
the left side, in which the safety speed limit is reduced
in the middle range and the wheelchair is approach-
ing an obstacle on the left hand side. In the first case
the wheelchair moved slowly and rotated slightly to
the left, and the command given by the subject was
to drive straight with a moderate speed. The second
case describes a situation, in which the wheelchair
moved slowly forward, and the subject commanded
the wheelchair to move slowly toward the right front.
Table 2: Sample critical points: the subject has the deficit
side on the left.
OdoSpeed
TranslX
OdoSpeed
Rotation
Joystick
Speed
Joystick
Direction
1 slowSpeed leftSlow midSpeed front
2 slowSpeed front slowSpeed rightFront
A critical point may be changed to an unsafe one
by joystick commands given by the user, see the two
examples in Table 3, which followed the two cases in
Table 2. They were reached by giving the left front as
the next direction in the subject’s last command.
Table 3: Sample unsafe points resulting from leftFront as
next direction.
OdoSpeed
TranslX
OdoSpeed
Rotation
Joystick
Speed
Joystick
Direction
1 slowSpeed leftSlow fastSpeed leftFront
2 fastSpeed rightSlow midSpeed leftFront
4.2 Identification of Behaviour Patterns
After analyzing a total number of 21 safety relevant
situations found in the test runs of the four partici-
pants with hemianopsia, we identified the following
three behaviour patterns, each of which is divided into
a critical and an unsafe part.
4.2.1 Pattern 1
In 12 out of 21 safety relevant situations the follow-
ing behaviour has been identified: the subject drives
toward his or her hemianoptic side – the side with
the visual deficit – and away from an obstacle that
is well perceived on the non-hemianoptic side. The
critical point of this pattern is specified as follows: the
wheelchair moves forward or rotates toward the user’s
hemianoptic side and the user keeps commanding the
wheelchair to move in this way. At the same time
the qualitative value for the safety speed limit is re-
duced to a value in the middle speed range because of
an approaching obstacle. If the described movement
MODELLING USER BEHAVIOUR WHILE DRIVING AN INTELLIGENT WHEELCHAIR
333

continues and the value for the safety speed limit is re-
duced to slowSpeed at the same time, the unsafe point
of this pattern is reached (see Figure 2 for an exam-
ple). Table 4 contains the qualitative definition of the
pattern.
4.2.2 Pattern 2
In four of the 21 situations we have identified a be-
haviour pattern, in which the subject kept driving to-
ward his/her normal side if possible, in order to avoid
obstacles that may occur at his/her deficit side. If
the user tries to avoid an obstacle located on the nor-
mal side by steering the wheelchair to the other side,
but does not notice an obstacle located on the deficit
side, an intervention of the safety assistant is neces-
sary to avoid a collision with the obstacle located on
the deficit side; see Table 4 for its specification. In
this pattern, the change of the critical point to the un-
safe one is caused predominantly by the change of the
joystick direction from the normal side to the deficit
side.
4.2.3 Pattern 3
The third pattern describes situations in which the
subject commanded the wheelchair to carry out an
obstacle avoidance maneuver by driving backwards,
however the safety module intervened to avoid a col-
lision with an obstacle located in the back of the
wheelchair; see Table 4 for its definition. In this pat-
tern the rotational direction of the wheelchair is in-
significant. This pattern is found in 3 out of 21 situa-
tions.
5 DISCUSSION
The three behaviour patterns cover 19 of 21 situations,
but the remaining two situations cannot be identified
by any reasonable pattern.
The related video material exhibited that the sub-
jects tried to apply several different steering com-
mands to navigate the wheelchair through the narrow
obstacle configuration. These changes of driving di-
rections in a short temporal sequence led to unpre-
dictable orientations of the caster front-wheels. Al-
though the intended steering commands are appro-
priate at that moment, the wheelchair could not fol-
low the subject’s commands in time. The subjects
were confused by the wheelchair’s behaviour, since
they were not aware of the position of the caster
front-wheels. As a consequence, they behaved unpre-
dictably. This phenomenon implies the existence of a
mode confusion, in which the wheelchair is situated in
a state different from the one expected by the subject.
Mode confusions occur typically in shared-control
systems (Thimbleby, 1990), such as the wheelchair.
During the experiment we observed another mode
confusion phenomenon: almost all subjects acted un-
common after the intervention of the safety assistant:
they attempted to regain control over the wheelchair,
but the wheelchair did not drive in the way they ex-
pected; as a result they tried to give the wheelchair
some arbitrary commands via the joystick or pressed
the joystick powerfully, which caused an even less ex-
pected movement of the wheelchair. Mode confusion
situations can be avoided through the improvement of
the system’s behaviour or providing the user with suit-
able clarification (Thimbleby, 1990).
An interesting application of the critical patterns
developed in Section 4 could be to support the re-
habilitation process of neglect and hemianopsia pa-
tients with cognitive and motor deficits. These pat-
terns enable the wheelchair to inform the user about a
possible collision with an approaching obstacle in ad-
vance, which would otherwise be noticed too late or,
even worse, ignored due to their spatial perceptional
problems. Instead of the current feedback from the
wheelchair, i.e., the disregard of the user’s commands
given via the joystick and the braking process in un-
safe situations, some acoustic signal, for example,
could be used to inform the user of an approaching
obstacle on his/her impaired side. As a consequence
the user could be trained to drive the wheelchair more
smoothly or even without the safety module in a nar-
row environment.
On the other hand, the behaviour patterns provide
us with helpful information to improve the existing
safety assistant. In our data we counted up to 5600
interventions in a single test run by some participants,
which is inconvenient in real life in spite of the guar-
anteed safeness. As a possible solution, the safety as-
sistant can be extended with a module that modifies
the joystick commands if a situation matching an un-
safe pattern has been detected, to compensate users’s
visual deficits, and reduce the number of the interven-
tions of the safety assistant.
Finally, the current work makes it clear that user
studies with an intelligent living assistant and real
users present us with hard challenges. They require
close cooperation of engineers, neuropsychologists,
and other medical professionals. In addition to the ex-
periment design, test environment construction, real-
ization, data analysis and user modelling, the accred-
itation of a homogeneous user group turned out to be
the most difficult one, at least if the group consists of
persons with specific cognitive or physical deficits. In
HEALTHINF 2010 - International Conference on Health Informatics
334
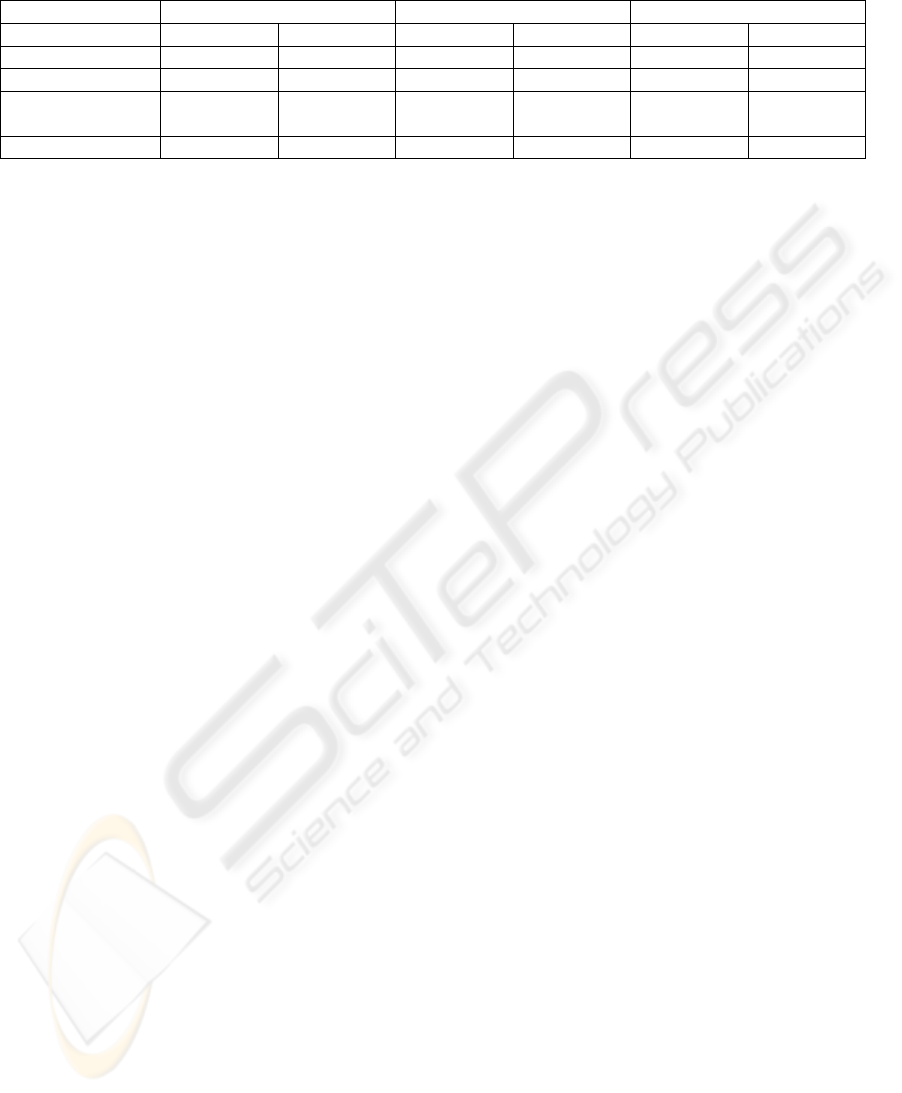
Table 4: Pattern definitions.
Pattern 1 Pattern 2 Pattern 3
Critical Unsafe Critical Unsafe Critical Unsafe
MaxSafeSpeed midSpeed slowSpeed midSpeed slowSpeed midSpeed slowSpeed
OdoSpeedTranslX ≥ slowSpeed ≥ slowSpeed ≥ slowSpeed ≥ slowSpeed ≥ slowSpeed ≥ slowSpeed
OdoSpeedRotation deficit, or deficit normal, or deficit - -
front front
JoystickDirection deficit deficit normal deficit back back
fact, we originally planned to carry out the experiment
with 12 patients with hemianopsia, however, over the
duration of the experiment only four patients in the
therapy clinic, who met all the requirements, were
available for our experiment.
6 CONCLUSIONS
The research work presented in this paper is an em-
pirical study with a real user group and an intelli-
gent assistance system. Specifically, we analyzed the
data collected in the experiment carried out with a
group of persons who are affected by hemianopsia,
and studied their behaviour while driving an intelli-
gent wheelchair passing obstacles located on their im-
paired side. The analysis process consists of the se-
lection of relevant data segments, interpreting the rel-
evant odometric data, and abstracting the data qualita-
tively. As a result three behaviour patterns have been
identified and discussed.
The application of these behaviour patterns is
twofold. First, it enables the development of an adap-
tive user interface, such that users can learn how to
control an intelligent mobile assistant smoothly, even
though he/she has visual/spatial perceptional prob-
lems. On the other hand, the improvement of the
safety assistant by adding an extra functionality to
compensate the user’s deficits is work to do. In future
experiments, we shall evaluate whether the driving
assistant, which has been developed to avoid obsta-
cles automatically (Krieg-Br
¨
uckner et al., pear), will
overcome such situations.
As discussed in Section 5, we are going to handle
the mode confusion problems by comparing the user’s
behaviour with that of the wheelchair after the inter-
ventions of the safety assistant. This requires the con-
struction of a user model using the relevant data col-
lected in the experiment introduced in Section 2. On
the other hand, the abstraction of the wheelchair’s be-
haviour is also necessary, such that they can be com-
pared directly for detecting mode confusions. Fur-
thermore, the qualitative models can even be specified
formally, thus an automatic mode confusion detection
process is possible by using formal techniques (e.g.
model-checking, cf. (Rushby et al., 1999; Heymann
and Degani, 2002; Bredereke and Lankenau, 2002)).
ACKNOWLEDGEMENTS
We gratefully acknowledge the support of the
Deutsche Forschungsgemeinschaft (DFG) through
the Collaborative Research Center SFB/TR8 - Project
I3-[SharC] ”Shared Control via Interaction”.
We would like to thank Prof. Dr. Volker H
¨
omberg
and his team at St. Mauritius Therapy Clinic Meer-
busch for their great support.
REFERENCES
Bredereke, J. and Lankenau, A. (2002). A rigorous view
of mode confusion. In Proc. of Safecomp 2002, 21st
Int’l Conf. on Computer Safety, Reliability and Secu-
rity, number 2434 in Lecture Notes in Computer Sci-
ence, pages 19–31. Springer-Verlag.
Burgar, C. G., Lum, P. S., Shor, P. C., and Van der Loos, H.
F. M. (2000). Development of robots for rehabilitation
therapy: The palo alto va/stanford experience. Journal
of Rehabilitation Res. Development, 37(6):663–674.
Cohn, A. G., Bennett, B., Gooday, J., and Gotts, N. M.
(1997). Qualitative spatial representation and reason-
ing with the Region Connection Calculus. Geoinfor-
matics, 1.
Cortes, U., Martinez-Velasco, A., Barrue, C., Benedico,
T., Campana, F., Fernandez, J., and Annicchiarico, R.
(2008). A SHARE-it service to elders mobility using
the i-walker. Gerontechnology, 7.
Dutta, T. and Fernie, G. R. (2005). Utilization of ultra-
sound sensors for anti-collision systems of powered
wheelchairs. IEEE Transactions on Neural Systems
and Rehabilitation Engineering, 13:24–32.
Freksa, C. (1992). Using orientation information for qual-
itative spatial reasoning. In Theories and Methods
of Spatio-Temporal Reasoning in Geographic Space,
volume 639 of Lecture Notes in Computer Science,
pages 162–178. Springer-Verlag.
MODELLING USER BEHAVIOUR WHILE DRIVING AN INTELLIGENT WHEELCHAIR
335

Hansen, M., Fabian, B., M
¨
oller, J., and Spiekermann, S.
(2006). Szenarien. In Technikfolgenabsch
¨
atzung
Ubiquit
¨
ares Computing und Informationelle Selb-
stbestimmung. Bundesministerium f
¨
ur Bildung und
Forschung, http://www.datenschutzzentrum.de/ tau-
cis/ita taucis.pdf.
Heymann, M. and Degani, A. (2002). Constructing human-
computer interaction in aeronautics. In Proc. of HCI-
Aero 2002.
Kanda, T., Kamasima, M., Imai, M., Ono, T., Sakamoto,
D., Ishiguro, K., and Anzai, Y. (2006). A humanoid
robot that pretends to listen to route guidance from a
human. Autonomous Robots, 22(1):87–100.
Krieg-Br
¨
uckner, B., T. R
¨
ofer, T., Shi, H., and Gersdorf, B.
(to appear). Mobility Assistance in the Bremen Ambi-
ent Assisted Living Lab. Journal of Gerontology. Spe-
cial Section: Technology and Aging: Integrating Psy-
chological, Medical, and Engineering Perspectives.
Kulyukin, V., Kutiyanawala, A., LoPresti, E., Matthews, J.,
and Simpson, R. (2008). iWalker: Toward a rollator-
mounted wayfinding system for the elderly. 2008
IEEE International Conference on RFID, pages 303–
311.
Lankenau, A. and R
¨
ofer, T. (2001). A safe and versatile mo-
bility assistant. IEEE Robotics and Automation Mag-
azine, 1:29–37.
Lee, M., Abdullach, H. A., and Basir, O. A. (2004). Model-
driven interactive system design for therapy robots.
Journal of Intelligent and Robotic Systems, 39:345–
363.
Montesano, L., Minguez, J., Alcubierre, J., and Mon-
tano, L. (2006). Towards the adaptation of a robotic
wheelchair for cognitive disabled children. In Pro-
ceedings of the 2006 IEEE/RSJ International Confer-
ence on Intelligent Robots and Systems, pages 710–
716.
Morganti, F. and Riva, G. (2005). Chapter 15: Am-
bient intelligence for rehabilitation. In Riva,
G., Vatalaro, F., Davide, F., and Alcaniz,
M., editors, Ambient Intelligence. IOS Press,
http://www.ambientintelligence.org.
Nehmer, J., Karshmer, A., Becker, M., and Lamm, R.
(2006). Living Assistance Systems - an Ambient In-
telligence Approach. In Proceedings of the 28th Inter-
national Conference on Software Engineering.
Riva, G. (2005). The psychology of ambient intel-
ligence: Activity, situation and presence. In
Riva, G., Vatalaro, F., Davide, F., and Al-
caniz, M., editors, Ambient Intelligence. IOS Press,
http://www.ambientintelligence.org.
R
¨
ofer, T., Laue, T., and Gersdorf, B. (2009). iwalker an
intelligent walker providing services for the elderly.
Technically Assisted Rehabilitation 2009.
Rushby, J., Crow, J., and Palmer, E. (1999). An automated
method to detect potential mode confusions. In Proc.
18th IEEE Digital Avionics Systems Conference.
Shi, H. and Krieg-Br
¨
uckner, B. (2008). Modelling Route
Instructions for Robust Human-Robot Interaction on
Navigation Tasks. International Journal of Software
and Informatics, 2(1):33–60.
Thimbleby, H. (1990). User Interface Design. ACM Press,
New York, USA.
HEALTHINF 2010 - International Conference on Health Informatics
336
