
MODELING AND TRANSFORMATION OF 3D HUMAN MOTION
Seyed Ali Etemad
Department of Systems and Computer Engineering, Carleton University, 1125 Colonel By Drive, Ottawa, Canada
Ali Arya
School of Information Technology, Carleton University, 1125 Colonel By Drive, Ottawa, Canada
Keywords: Piece-wise Time Warping, Synthesis, Style Transformation, Critical Features.
Abstract: Applying different styles of motion such as those related to gender, age and energy of the performer, are
important themes in creating realistic animation. While typically different sets of motion sequences must be
created for different styles, in this paper we present a technique for transferring motion styles across
different sequences. This allows transforming the style of a motion while preserving the primary action
class of the original motion. A mathematical model capable of defining both the action class and the style
class is proposed and based on the model, the conversion data are computed. A series of piece-wise time
warping procedures are conducted prior to employing the defined transformation function. Using this
technique, there would be no need for a new set of motion data to be captured or keyframed as the original
motion data can be altered to show the desired style.
1 INTRODUCTION
The use of optical motion capture systems to
produce high quality humanoid motion sequences
has recently become increasingly popular in many
areas such as high-end gaming, movie and animation
production, and for educational purposes. Motion
capture studios are expensive to employ or are
unavailable to many people and locales. For this
reason, the reuse of existing motion capture data and
the resulting high-quality animation is an important
area of research. Also strict motion capture data
restricts users to pre-recorded movement that does
not allow the addition of dynamic behaviours
required in advanced games and interactive
environment.
Procedural animation is creation of motion
sequences through an algorithm rather than
conventional methods like keyframing and motion
capture. Creating new styles (i.e. personal variation
of a base action) of animation based on existing
motion sequences is an example and a relatively new
topic of research in the field of animation where the
goal is to manipulate existing sequences to create
animation of the same action class, yet in a different
mode. For instance using such techniques, a walking
action sequence can be transformed from its initial
masculine mode to a feminine one. Similarly the age
and energy level of the characters can be controlled
and the respective motion data can be synthesized.
The goal of this research is to create a system
capable of learning various action classes with
specific styles related to its character, and transform
the style based on the user desire. Examples of the
basic classes of action are the three periodic actions
of walking, jumping and running. While walking
and jumping are considerably different, walking and
running are relatively similar, thus synthesis of
motion data for these actions must be especially
accurate.
For each basic class of action, secondary
variation style pairs are necessary for adding a level
of personality to the motions. Articles relating to
personality and behaviour such as (Sok, et al., 2007;
Su, et al., 2005; Kang & Kim 2007) were reviewed
in order to determine contributing factors of human
locomotion that can show a character’s personality.
These personality variations add a level of
personality and interest to the basic, unexaggerated
animation types mentioned earlier. Masculine to
Feminine, Old to Young, Tired to Energetic, Happy
to Sad, and Determined to Dreamy are these
307
Ali Etemad S. and Arya A. (2010).
MODELING AND TRANSFORMATION OF 3D HUMAN MOTION.
In Proceedings of the International Conference on Computer Graphics Theory and Applications, pages 307-315
DOI: 10.5220/0002755003070315
Copyright
c
SciTePress

animation variation styles. By incorporating the
variations with the basic animation types, new and
unique character animations can be produced. The
presented procedural animation method is a proof of
concept production, and as such, only a selection of
the animation types and variations are tested using
our proposed method. The Walk, Run, and Jump
animation types with the Masculine to Feminine,
Old to Young, and Tired to Energetic variations are
included. Yet the system can be extended to include
other styles in the future.
We have proposed a novel mathematical model
for describing human actions with various styles; the
same model has been used to describe each step. The
proposed transformation method is based on
applying a transfer function obtained during a
training phase to the base motion sequence in order
to create a desired motion. The first step for style
transformation of actions is for the training data to
be temporally equal in length i.e. motion data
matrices must have same number of frames in order
for us to perform mathematical operations on them.
We have proposed a novel piece wise time warping
technique to convert our motion data sets to data sets
of the same temporal length. The model has then
been used to generate the necessary transfer
functions for style transformations between different
styles of the same action.
To test the outputs of our transformation
techniques we formed a questionnaire and arranged
for participants to exercise various transformations
applied on different actions. The user comments and
ratings confirm the significance of our research. Our
procedural animation method offers animators high
quality animations produced from an optical motion
capture session, without incurring the cost of
running their own sessions. This method utilizes a
database of common animations sequences, derived
from several motion capture sessions, which
animators can manipulate and apply to their own
existing characters through the use of our procedural
animation technique.
2 RELATED WORK
In recent years, much research has been
conducted with the aim of synthesizing human
motion sequences. Statistical models have been one
of the practical tools for human motion synthesis
(Tanco & Hilton, 2000; Li, et al., 2002). Tanco and
Hilton (2000, pp. 137-142) have trained a statistical
model which employs a database of motion capture
data for synthesizing realistic motion sequences and
using the start and end of existing keyframes,
original motion data are produced. Li et al. (2002,
pp. 465-472) define a motion texture as a set of
textons and their distribution values provided in a
distribution matrix. The motion texton is modeled by
a linear dynamic system (LDS). A maximum
likelihood algorithm is designed to learn from a set
of motion capture based textons. Finally, the learnt
motion textures have been used to interactively edit
motion sequences.
Egges et al. (2004, pp. 121-130) have employed
principal component analysis (PCA) to synthesize
human motion with the two deviations of small
posture variations and change of balance. This
approach is useful in cases where an animated
character is in a stop/freeze situation where in reality
no motionless character exists. Liu and Papovic
(2002, pp. 408-416) have applied linear and angular
momentum constraints to avoid computing muscle
forces of the body for simple and rapid synthesis of
human motion. Creating complex dynamic motion
samples such as swinging and leaping have been
carried out by Fang and Pollard (2003, pp. 417-426)
using an optimization techniques applied along with
a set of constraints, minimizing the objective
function. Pullen and Bregler (2002, pp. 501-508)
have trained a system that is capable of synthesizing
motion sequences based on the key frames selected
by the user. Their method employs the characteristic
of correlation between different joint values to create
the missing frames. In the end quadratic fit has been
used to smooth the estimated values, resulting in
more realistic looking results. Brand and Hertzmann
(2000, pp. 183-192) employ probabilistic models for
interpolation and extrapolation of different styles for
synthesis of new stylistic dance sequences using a
cross-entropy optimization structure which enables
their style machine to learn from various style
examples. Safonova et al. (2004, pp. 514-521) define
an optimization problem for reducing the
dimensionality of the feature space of a motion
capture database, resulting in specific features.
These features are then used to synthesize various
motion sequences such as walk, run, jump and even
several flips. This research shows that the complete
feature space is not required for synthesis of human
motion. We have employed this property in section 5
where correlated joints have been ignored when
transforming the actor style themes.
Hsu et al. (2005, pp. 1082-1089) conduct style
translations such as sideways walk and crouching
walk based on a series of alignment mappings
followed by space warping techniques using an LTI
model. While this technique shows to be functional
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
308

for the mentioned style translations, more minute
style variations such as those related to gender,
energy and age have not been tested for. Rose et al.
(1998, pp. 32-40) have employed time warping as
the first step towards synthesis of human motion
which is an approach similar to ours. Specific
kinematic constraints have been exercised along
with interpolation of styles. The constraints,
however, are selected manually and based on the
nature of the action, as opposed to our proposed
method in chapter 6 where we tend to automate the
constraints. Time warping is also studied by Hsu et
al. (2007, pp. 45-52) where they have used a specific
reference motion for defining the constraints of the
time warping procedure. Although this technique
proves to be useful in some cases, it is not discussed
whether the reference action is capable of
determining the most suitable constraints for all
cases.
3 DATASETS AND MOTION
THEORY
Motion capture data obtained by means of a six
MX40 camera Vicon system based in Carleton
University have been used for this research. We
have asked various actors to perform the required
basic class of actions in each variation style, and the
necessary database has been created.
The motion capture data come in the form of (1),
where Di are the Cartesian values for the hip marker
in 3D space with respect to the calibration origin and
Θ
i
are the rotation angles in degrees for each marker.
There are m rows, denoting m frames.
mm
D
D
D
A
,
,
,
22
11
(1)
In more details, the motion data matrices are in
the form (2) where
j
x
i
represents the rotation values
of the x
th
axis of the j
th
marker for the i
th
frame and
d
i
x
represents the position of the x
th
axis of the hip
marker for the i
th
frame.
nnn
nnn
nnn
z
m
y
m
x
m
z
m
y
m
x
m
zyx
zyx
zyx
zyx
z
m
y
m
x
m
zyx
zyx
ddd
ddd
ddd
A
,,,...,,,
,,,...,,,
,,,...,,,
,,
,,
,,
111
111
111
222222
111111
222
111
(2)
The frame rate of A is consistent throughout the
whole matrix and the time lapse between each two
consecutive frames is fixed and equal to 0.05
seconds. It is very important that all motion samples
be of the same frame rate.
For this research, two different sets of data have
been acquired. The first data set is used for training
the system and creating the transformation values,
while the second is used for testing the system as
will be discussed later on in section 6.
Human action and motion in general is a
combination of an action class and a set of stylistic
variations adjoined to it. We call the action classes
which are the dominant signals throughout the data
sets, primary themes, and the stylistic variations as
secondary motor themes (Hutchinson, 1996). Based
on this definition, any action can be modeled by (3)
where Y[k,r] is the action sequence with the primary
theme k and secondary theme r as it is observed,
P[k] is the primary motor theme of the same action
class, and S[r] is the secondary theme of class r. In
(3) w[r] is the weight applied to the secondary
themes, and e represents the noise available in the
model.
erSrwkPfrkY
f
r
1
][][][]:1,[
(3)
The model (3) is defined such that a combination
of different styles can be applied to the same
primary class of action. For instance, for action class
jump, the secondary theme young-feminine can be
defined. A total of f different S functions are
foreseen in the model. Yet while training the system,
all samples are designed and assumed to hold only
one secondary theme. Each secondary theme
function is learnt separately, and ultimately, they can
be merged to form a multi-style secondary theme.
The goal of this research is to create the S[r]
values, while trying to minimize e. In most cases,
the S[r] signals are not powerful enough to influence
the perception of k, i.e. the action class. But rarely,
this scenario might take place. For instance if r
relates to class of energy and speed related themes,
S[r] along with a notable w[r] applied to a primary
theme of walking can cause confusion as to if Y[k,r]
was originally walking with a strong S[r] and w[r],
or whether k determines the action class of running
for Y[k,r], and S[r] and w[r] have been insignificant.
This dilemma is addressed in section 6, yet further
research is ongoing to tackle this issue.
MODELING AND TRANSFORMATION OF 3D HUMAN MOTION
309
4 FEATURE SELECTION AND
PIECEWISE TIME WARPING
The captured motion data matrix A can be in various
lengths. While some actions have been performed
faster or slower due to actor preferences, some
actions are by nature faster or slower than others.
For instance, a 2-step walk cycle takes more time
compared to a 2-step run cycle. In order to
manipulate such data matrices based on one another,
the temporal length of each action should be warped
to match the temporal length of the relative actions
with which we intend to blend. As for the number of
columns in the matrices, they do not require any
manipulation since the exact same number and
orientation of markers have been used for all capture
sessions.
The system is trained based on the original input
sequence and the target sequence. The first set is the
base animation while the second is the target
sequence containing the desired secondary theme.
Together they are called the training data. The
system is then tested for new sets of action
sequences called the test data. The training data
along with the test sequence are temporally warped
such that they are all in length. A straightforward
approach is simple scaling; that is stretching or
shrinking the motion sequences. Yet the sequences
must be aligned appropriately. To tackle this
problem, the warping of the matrices is carried out
with the goal of aligning some critical features of the
three datasets.
To conduct the very crucial piece-wise time
warping, the signals are divided into two sections.
The corresponding first sections are warped
together, and the second parts are warped together as
well. This is carried out in order for different
corresponding sections of the action sequences to be
aligned correctly. Thus, selecting the proper feature
for which the signals are sliced at is very critical.
Different methods were tested for finding the
critical features, used to determine the boundaries
for the piece-wise time warping. The first method is
by manually selecting the features. For walk and run
sequences, the feature instance was selected as the
occurrence of a foot touching the ground. This
means in a sequence where walking starts with the
right foot initiating the walk and ending in the same
situation, the instance when the left foot touches the
ground is labelled as the feature. For the jump
sequence, the feature is defined as the instance
where the actor is at the peak of his/her jump (when
the inclining motion stops and returning to the
ground initiates). Figures 1 and 2 illustrate the
piecewise warping conducted using this technique.
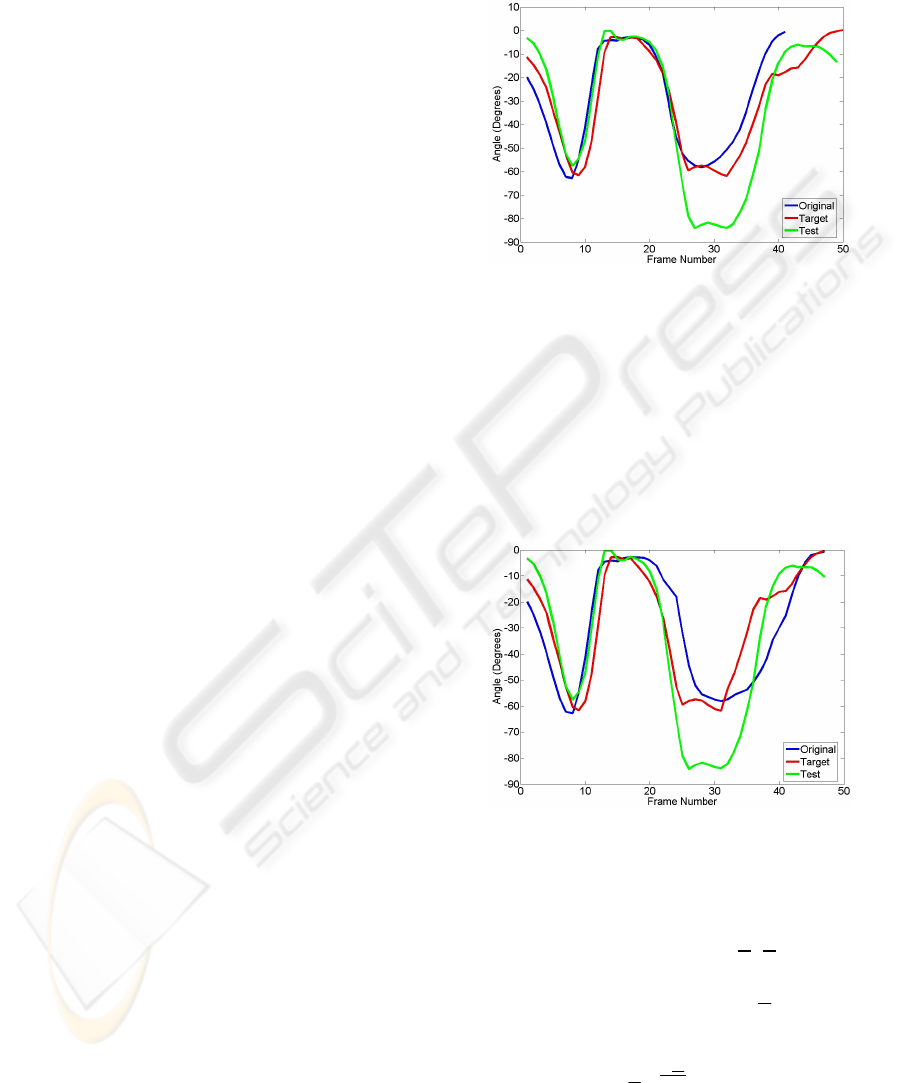
In Figure 1 through Figure 5, the data for the x axis
of the marker placed on the right leg are plotted.
Figure 1: Signals from training, target, and test matrices
before time warping.
It can be noticed from Figure 2 that the warped
signals are stretched to last the exact amount of time
(46 frames) which is the average of each of the
individual signals in Figure 1. Yet misalignment in
the global minimum peaks has occurred. Also the
alignment of the signals between frame 20 and 30 is
disposed of which is an undesired artefact. Thus
selecting the features manually is not recommended.
Figure 2: Signals from training, target, and test matrices
after time warping using manual feature selection.
The second method is by means of statistical
analysis. The A matrices are first normalized. The
normalized version of A is called A
. A matrices are
then differentiated with respect to time as presented
by (4) where the result is denoted by
A
presented by
(5) and (6).
t
A
A
(4)
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
310
nnnnnn
nnnnnn
nnnnnnn
z
m
z
m
y
m
y
m
x
m
x
m
z
m
z
m
y
m
y
m
x
m
x
m
zzyyxx
zzyyxx
zzyyxxx
zyyxx
A
111111
323232323232
212121212121
,,,...,,,
,,,...,,,
,,,...,,,
111111
111111
11111
(5)
n
mmm
n
n
vvv
vvv
vvv
A
321
3
2
2
2
1
2
3
1
2
1
1
1
,,,
,,,
,,,
(6)
The vector Φ is then calculated by (7).
n
i
i
m
n
i
i
n
i
i
v
v
v
3
1
3
1
2
3
1
1
(7)
The Φ vector determines the net velocity of all
markers for each frame. The total velocity of all
markers is a very determinant informative value.
The maximum or minimum arrays of Φ verify the
instances where the actor has reached his/her
maximum angular velocity of the action. The largest
column value in Φ determines the critical feature,
which is where the maximum angular velocity is
observed. Assuming that during the course of an
action, the markers accelerate from zero angular
velocity to this value and then accelerate back to
zero, time warping is carried out for each section of
the action. The result is actions of the same length
and temporally aligned such that sections of the
action with positive angular acceleration and
negative angular acceleration are aligned. Both the
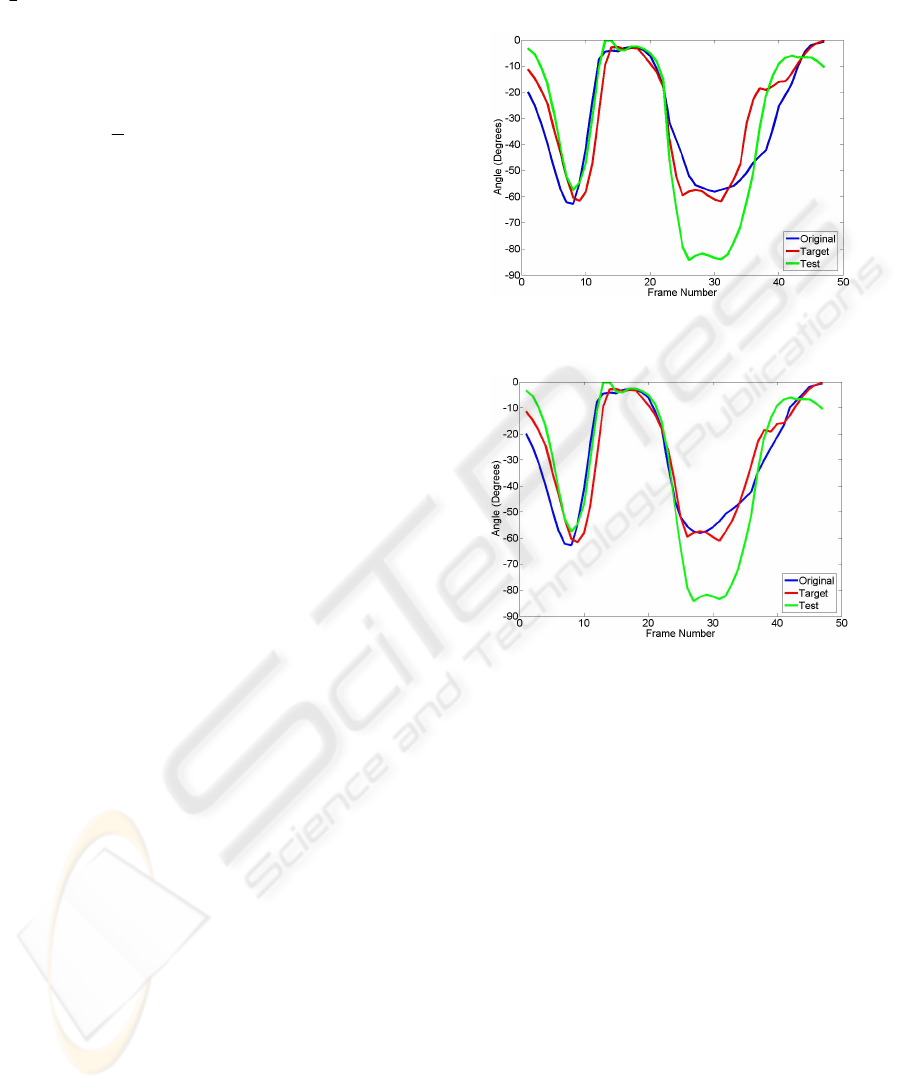
maximum and minimum values were tested. Figures
3 and 4 show the effect of selecting the features
based on this method.
It can be noticed that in Figure 3 and Figure 4, a
similar stretching as Figure 2 has occurred and the
output signals are all 46 frames. Yet the alignment
of the signals is regarded. The global maximum and
minimum points are aligned with higher accuracy as
they take place in the same time compared to Figure
2, and frames 20 to 30 have not been misaligned.
Comparing Figure 3 and Figure 4, we can observe
that Figure 4 shows more alignment in the case of
global minimum for frames 20 to 30.
Animating the new warped signals confirms the
fact that the conducted operations on the datasets
have not altered the data significantly and that the
primary or the secondary themes (k and r) are not
altered, thus the groundwork for computing the
conversion matrices has been laid successfully.
Figure 3: Signals from training, target, and test matrices
after time warping using maximum velocity features.
Figure 4: Signals from training, target, and test matrices
after time warping using minimum velocity features.
5 CONVERSION MATRIX
EXTRACTIONS AND
POST-PROCESSING
With the assumption that in (3), the k and r values
are unchanged and the same model is still valid, two
action sequences of the same class and different
secondary theme Y
1
[k,r
1
] and Y
2
[k,r
2
] can be
modelled by (8) and (9) respectively.
11111
][][][],[ erSrwkPrkY
(8)
22222
][][][],[ erSrwkPrkY
(9)
Differentiating among Y
1
and Y
2
generates ΔY
presented by (10).
121122
][][][][ eerSrwrSrwY
(10)
MODELING AND TRANSFORMATION OF 3D HUMAN MOTION
311
Assuming equal weights for the secondary
themes and that only one secondary theme is present
in each sequence, the differentiated secondary
themes are the desired transformation matrix
between the two secondary themes, Γ[r
1
,r
2
], which
is defined by (11) and computed by (12).
][][][][],[
112221
rSrwrSrwrr
(11)
212221
],[],[],[ eerkYrkYrr
(12)
In simple terms, for an action sequence with only
one secondary theme, the transformation matrix is
derived by differentiating the base and the target
sequences, along with noise elimination techniques.
It can be examined that the transformation
function T defined by (13) can be applied to action
sequence Y[k,r(1:f)] for converting the secondary
theme r
i
to r
j
.
jirr
rrwfrkYfrkYT
ji
,]:1,[]]:1,[[
,
(13)
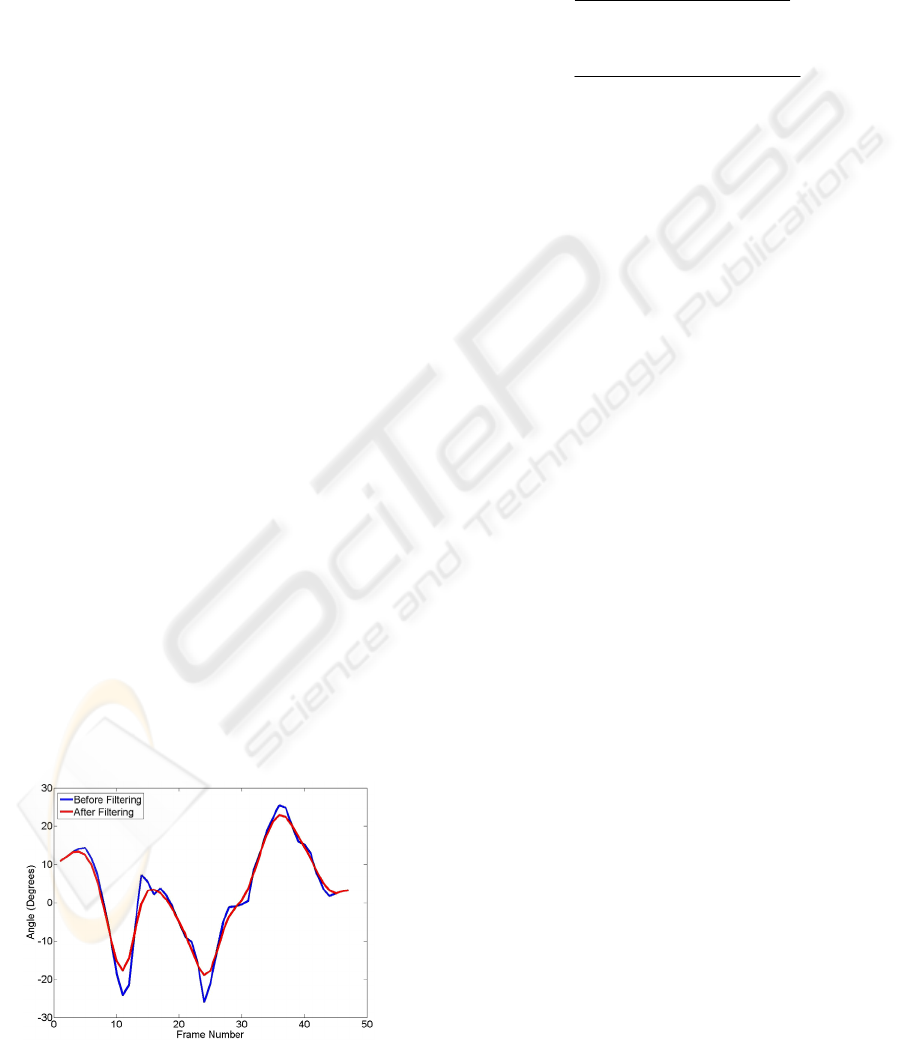
To eliminate the term (e
1
- e
2
) from (12), low
pass filtering is utilized. The affect of the noise
reduction process is presented in Figure 5.
The conversion signals are a result of
differentiating between two sequences of the same
primary theme with different secondary themes. Due
to the frame-to-frame approach for differentiation,
this process is very sensitive and sharp local and
global maximum and minimums are produced.
Animating the final raw outcome illustrates various
artefacts for different joints. Undesired motion such
as tremor and rigidity in some body parts are the
direct affect of the proposed techniques. Applying a
low pass filter results in smoothing of the conversion
data and the output signals as illustrated in Figure 5
eliminates some local maximum and minimums.
Disappearance of the tremor symptoms of the
animations as a result of filtering reaffirms the
necessity for post-processing the data.
Figure 5: The effect of low pass filtering.
Another technique was also employed for
transforming the secondary themes. With the
assumption that one secondary theme is present in
the sequence, the interpolation procedure derived by
(14) and (15) will also result in Y[k,r] which is a
sequence with the original primary action class P[k].
21
222111
],[],[
],[
ww
rkYwrkYw
rkY
(14)
e
ww
rSrwwrSrww
kPrkY
21
222111
][][][][
][],[
(15)
In (15) the second term represents an
interpolation among the two secondary themes while
the third term e is the interpolated noise signal. Also
the first term P[k] indicates that the primary theme
of the action has remained unchanged. It is very
important that the secondary themes which are to be
interpolated be of the same nature. For instance, they
must be all related to age, or gender, or energy.
Interpolating between secondary themes of different
nature is meaningless as it is not logical to
interpolate, for instance, between a young theme and
a low energy theme. Nevertheless interpolation
between a young theme and an old theme is likely to
produce a mid-aged theme for the primary action
class k. The same low pass filtering process is
carried out to eliminate the noise from the output
data.
The two techniques presented above have been
implemented and the results are discussed and
compared in section 6. It is important to note the fact
that the conversion data do not need to include all
the joint values. For instance the markers placed on
the head don’t have a significant impact on the
secondary themes. A selected handful of markers
thought to be influential to the secondary themes are
altered and the rest are left unchanged, since
including all the markers will only increase the run
time and system error. The markers which have been
selected for manipulation are on the spine, arms, and
legs.
6 RESULTS AND DISCUSSIONS
As discussed in section 4 various techniques were
used for determining the feature instances for the
piece-wise time warping of the data. The minimum
velocity-based features proved to be most suitable
and are employed in the system. Successive to
warping the action sequences, the transformation of
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
312
the secondary themes take place using (8) to (15).
The computations are carried out in Matlab and the
results are transferred to Maya for visualization and
further evaluation.
Interpolation between the sequences was
implemented to compare with our approach. The
weights of 0.5 and 0.5 for w
1
and w
2
were selected
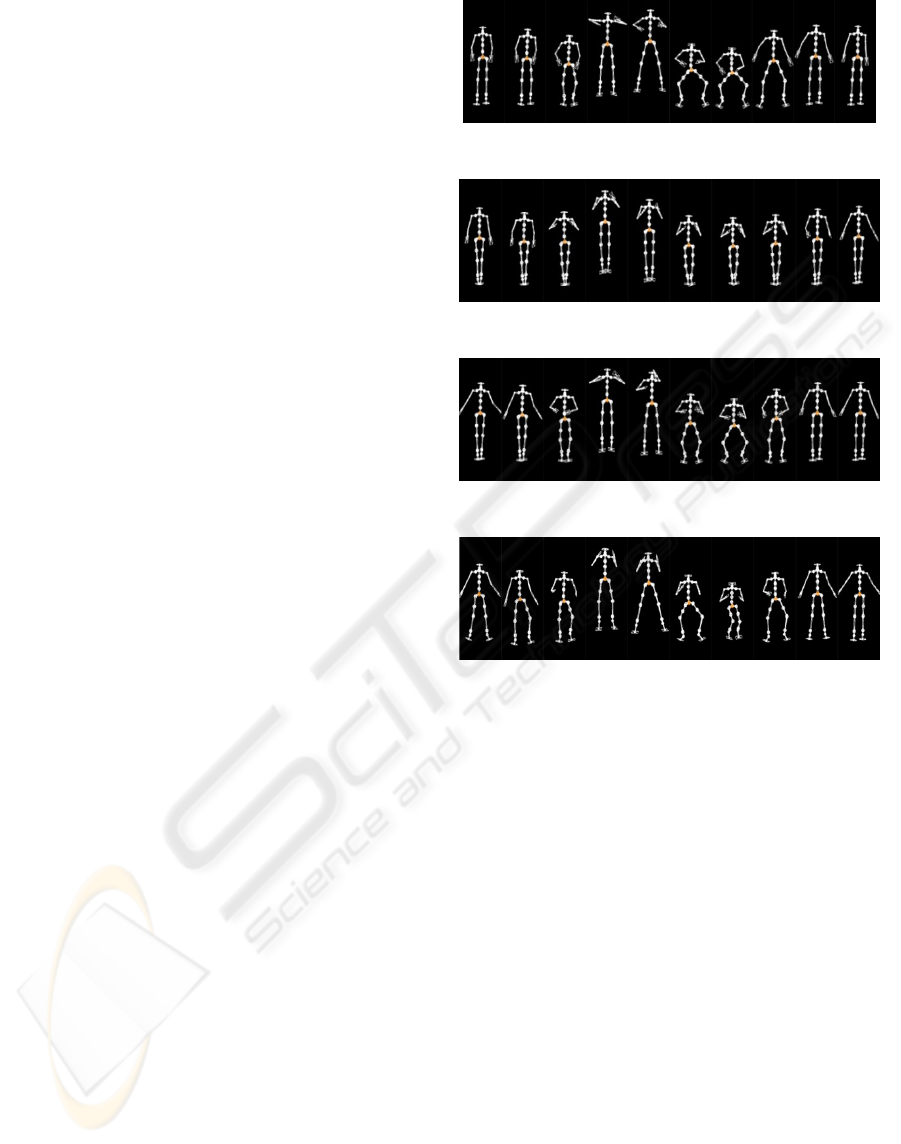
for each of the sequences to be interpolated. Figure 6
shows an original masculine jump (base) while
Figure 7 presents an original feminine jumping
(target) sequence successive to the time warping
procedure. Figure 8 illustrates the interpolated
output of the two actions. It is noticed that the action
is femininized to some extent, yet creating a 100%
feminine jump is only possible through setting the
weight of the masculine jump to zero. Although this
produces a perfect feminine jump, the dilemma is
the fact that the base action (masculine) is
completely excluded from the process; therefore the
system is only outputting the training feminine target
sequence. Figure 9 illustrates the output of the
system based on computing the transformation
function. In this sequence, the legs are femininized
similar to the interpolation output but with few
variations. The movement of the arms however, are
adjusted with more significance. Overall the output
is no worse, if not better, than the practical
interpolation. The huge advantage remains,
however, the fact that using the proposed model, we
have not eliminated the base action which the
secondary theme is desired to be added upon. The
same affect can be seen for other primary and
secondary themes and the advantage holds valid.
A rather detailed investigation for the proposed
transformation technique shows that the secondary
themes have been detached and added to the base
samples with high precision. Figure 10 (left) shows
the original masculine walk before conversion and
Figure 10 (right) shows the same keyframe after the
conversion. The Figure clearly shows the
transformation of feminine walk to masculine walk
using the model. While in feminine walk, the legs
are placed sequentially in front of one another, in
masculine walk, the legs are placed further apart.
Also the movement of the hip is limited in masculine
walk as opposed to the feminine where more
movement is visible in that area. Similar
manipulations are visible for other styles and other
classes of action such as that illustrated in Figure 11.
Figure 11 presents the conversion of low energy
(tired) run (left) to a high energy run (right) using
our proposed model. The movement of the legs
clearly shows the successful conversion of the two
styles.
Figure 6: Original masculine jump.
Figure 7: Original Feminine jump.
Figure 8: Interpolation output.
Figure 9: The output using transformation function.
To further evaluate the algorithms used to
synthesize the animation, a questionnaire was
formed and participants were asked to evaluate the
quality of the outputted animation. The
questionnaire included various enquiries regarding
each primary action class and all the three secondary
themes. The produced animation sequences were
highly acknowledged as only a few users were
unsatisfied with the results. An average 80%
approval rate by the participants regarding
successful style transformations using our model
confirms the significance of our proposed method.
Most of the concern with the animations were
regarding some of the running sequences which due
to the warping procedure, appeared as some sort of
fast-walk, yet re-runs of the animation and further
trials aided in clarifying and distinguishing between
the two classes. In general, our proposed method
was highly favoured over the interpolation
technique.
MODELING AND TRANSFORMATION OF 3D HUMAN MOTION
313
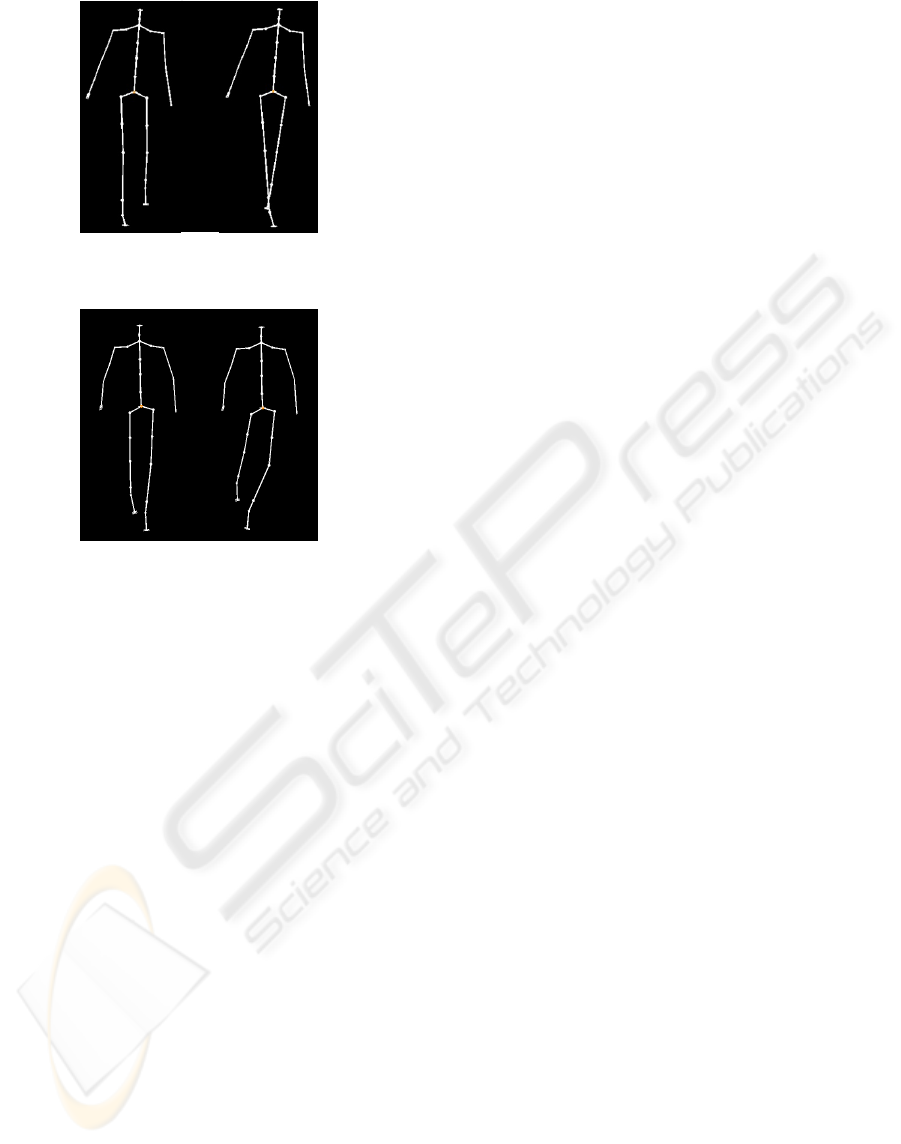
Figure 10: Original masculine walk (left), converted to
feminine walk (right).
Figure 11: Original low energy run (left), converted to
high energy run (right).
7 CONCLUSIONS AND FUTURE
WORK
The key insights into this paper are the piece-wise
time warping and features employed to conduct the
warping procedure, along with the mathematical
model proposed to describe human motion.
To align the motion samples correctly, critical
features were computed for each action sequence.
The signals were all warped such that after the
warping process they all contain the same number of
frames and the features be aligned i.e. they must
occur at the same time. The features were computed
in different fashions to search for the most
functional method. Selecting the feature instance
manually and using statistical analysis were the two
major categories where the second proved to be
much more efficient. Two different approaches were
taken based on statistical feature selection: the first
employed the instance when maximum net velocity
is reached, and the second when the minimum net
velocity occurs, where the second proved to be more
effective.
The proposed mathematical model is based on
dividing human motion into three components of
primary theme, secondary theme, and noise. The
primary theme is the main action class, for instance
walking, running or jumping and the secondary
theme is determined by the gender, energy, age, and
other specifications of the actor. The noise is
reduced by applying a low-pass filter.
Based on the model, a transformation function is
defined which can extract the secondary themes
from the training data and attach them to the test
sequence. The computed transformation signals are
used to convert any action of the same primary
theme to an action containing the desired secondary
theme.
For future work, further primary and secondary
themes are to be tested. Actions such as idling,
strafing left and right, crouching, and a collapsing or
death sequence which are popular in the field of
animation and game design are projected to be
included. Some other secondary themes such as
weight, happy/sad, and kind/angry also seem
important and worth further attention.
Other transformation functions based on the
proposed model could be derived and applied. As
the model seems promising, further study on
developing new techniques for separation of the
themes is necessary.
Another area in which this research seems
promising is the combination of secondary themes.
It is usually necessary to produce combined styles
such as old-angry, or young-feminine and etc. We
are currently working on different methods for
combining the transformations for each style such as
weighted averaging, MIN/MAX, and rule-based
operators.
REFERENCES
Brand, M., Hertzmann, A., 2000. Style Machines. In
Proceedings of the 27th International Annual
Conference on Computer Graphics and Interactive
Techniques. July 2000, pp. 183-192.
Egges, A., Molet, T., Magnenat-Thalmann, N., 2004.
Personalised Real-time Idle Motion Synthesis. In
Proceedings of the 12th Pacific Conference on
Computer Graphics and Applications. Oct 2004, pp.
121-130.
Fang, A. C., Pollard, N. S., 2003. Efficient Synthesis of
Physically Valid Human Motion. ACM Transactions
on Graphics. 22(3), pp. 417-426.
Hsu, E., da Silva, M., Popovic, J., 2007. Guided time
warping for motion editing. In Proceedings of the
2007 ACM SIGGRAPH/Eurographics symposium on
Computer animation, August 2007, pp. 45-52.
Hsu, E., Pulli, K., Popovic, J., 2005. Style Translation for
Human Motion. In ACM SIGGRAPH ’05. July 2005,
pp. 1082-1089.
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
314

Hutchinson, A., 1996. Labanotation, Dance Books.
Kang, H., Kim, M., 2007. A Study of Walking Motion for
Game Character with a Player’s Emotional Factors
Applied. In 5th ACIS International Conference on
Software Engineering Research, Management &
Applications, Aug 2007, pp. 911-916.
Li, Y., Wang, T., Shum, H. Y., 2002. Motion Texture: A
Two-Level Statistical Model for Character Motion
Synthesis. ACM Transactions on Graphics. 21(3), pp.
465-472.
Liu, C. K., Popovic, Z., 2002. Synthesis of Complex
Dynamic Character Motion from Simple Animations.
In Proceedings of the 29th International Annual
Conference on Computer Graphics and Interactive
Techniques. July 2002, pp. 408-416.
Pullen, K., Bregler, C., 2002. Motion Capture Assisted
Animation: Texturing and Synthesis. ACM
Transactions on Graphics. 21(3), pp. 501-508.
Rose, C., Cohen, M. F., Bodenheimer, B., 1998. Verbs and
Adverbs: Multidimensional Motion Interpolation.
IEEE Computer Graphics and Applications. 18(5), pp.
32-40.
Safonova, A., Hodgins, J. K., Pollard, N. S., 2004.
Synthesizing Physically Realistic Human Motion in
Low-Dimensional, Behavior-Specific Spaces. ACM
Transactions on Graphics. 23(3), pp. 514-521.
Sok, K., Kim, M., Lee, J., 2007. Simulating Biped
Behaviors from Human Motion Data. ACM
Transactions on Graphics. 26(3), Article 107.
Su, W., Pham, B., Wardhani, A., 2005. High-level Control
Posture of Story Characters Based on Personality and
Emotion. In Proceedings of the 2nd Australasian
Conference on Interactive Entertainment, Nov 2005,
pp. 179-186.
Tanco, L. M., Hilton, A., 2000. Realistic synthesis of
novel human movements from a database of motion
capture examples. In Proceedings of Workshop on
Human Motion, July 2000, pp. 137-142.
MODELING AND TRANSFORMATION OF 3D HUMAN MOTION
315
