
PRACTICAL DESIGN OF FULL BODY EXOSKELETONS
Stretching the Limits of Weight and Power
Stefan Roland Taal and Yoshiyuki Sankai
Graduate School of Systems and Information Engineering, University of Tsukuba
1-1-1, Tennodai, Tsukuba, Ibaraki, 305-8573, Japan
Keywords: Robot suit, HAL, Exoskeleton, Augmentation, Practical design, Exo-spine, Nurses, Lifting assist.
Abstract: The development of full body, wearable exoskeletons has been limited by the constraints of weight and
available power. Because of this it has not been possible to create one that augments all DoF of its human
wearer with enough power to assist, e.g., nurses and other workers. To achieve more usefulness despite the
limitations, a practical design approach that considers the motions and needs of the wearer is an appropriate
tool to reveal new opportunities. This approach was used to find solutions for a fully supported 3DoF exo-
spine, supported shoulder girdle motion, and other challenges that have so far received little or no attention.
No extra actuators are required, thus adding a minimum to weight and power. The improvements found
using this practical approach suggest related fields like rehabilitation could profit as well.
1 INTRODUCTION
Recent levels of technology have enabled the
creation of various exoskeletal devices: robots that
surround (parts of) a human wearer in order to assist
him in his movements. Applications range from
rehabilitation to strengthening nurses and others in
their work. Yet, the all-round applicability of fully
wearable, i.e. also energetically autonomous, and
particularly full body exoskeletons, has so far been
limited by the low amount of degrees of freedom
(DoFs) and actuators achievable in such devices.
Increasing the applicability requires augmen-
tation of more human DoFs. This necessitates
adding heavy actuators and an accordingly larger
power supply for a running time of perhaps a few
hours. The more useful and thus larger the device
the more unlikely it is to fit in the settings of a
hospital or home, and hence designers were forced
to limit the abilities of their exoskeletons.
Considering the needs of aging societies to take
care of the older generations, this research focuses
on exoskeletons for augmentation of nurses and
other workers, and has a long term goal to develop a
version for physically challenged patients. It is based
on the full body robot suit HAL-5 from which a
lower body suit was derived for patients who have
difficulties walking (Suzuki et al. 2005).
To arrive at new solutions, this paper reviews
existing exoskeletons, shows why and how we
should change our design approach, and, to show the
effectiveness of the new approach, proposes
solutions from a mechanical perspective that
maximize the capabilities of full body robot suits.
1.1 Existing Exoskeletons
Lower body exoskeletons have been discussed
(Dollar & Herr 2008) and few challenges remain. As
for the upper body part (from the hip to the hands)
(a) (b)
Figure 1: Lifting DoF: the interdependence between hip en
trunk moments during lifting, as indicated by the arrows in
(a). The interaction forces, (b), between different body
parts provide additional proof.
133
Roland Taal S. and Sankai Y. (2010).
PRACTICAL DESIGN OF FULL BODY EXOSKELETONS - Stretching the Limits of Weight and Power.
In Proceedings of the Third International Conference on Biomedical Electronics and Devices, pages 133-138
DOI: 10.5220/0002756901330138
Copyright
c
SciTePress

there are more DoFs and larger workspaces that
ultimately compete with the constraints of weight
and power. Hence, this is the focus of this review.
One wearable full body exoskeleton is the nurse
power suit (Yamamoto 2002). It uses a pneumatic
actuator system to augment the muscles used for
lifting patients. While it is focused on patient lifting,
its workspace, however, is otherwise limited.
Another, the Agri Robot, has not yet appeared in
print, but may be found on the web (Toyama 2009).
It actuates motors that coincide with the knees, hips,
shoulders and elbows according to spoken
commands. Its main purpose is helping farmers.
These two exoskeletons, as well as HAL, show
exactly how the limitations on weight and power
result in augmentation of few DoFs while the
shoulder girdle and spine remain immobile.
As for other types, there are several wearable
arm exoskeletons that augment all DoFs of the
human arms and shoulder girdle (Schiele & Van der
Helm 2006) (Folgheraiter et al. 2009). These are for
rehabilitation and haptics and require only small
output torques. Using such structures to assist lifting,
however, would result in larger and heavier devices.
The XOS exoskeleton, manufactured by Sarcos,
also remains unpublished (BBC News 2008). This
full body suit requires an external power source, but
can provide powerful augmentation. The robot’s
arms only interact with the human at the end effector,
thereby allowing the shoulder girdle to move as well.
Another type of exoskeletal devices consists of
arms supported on a fixed base. The purpose of such
devices differs, but, despite the freedom regarding
weight and power, girdle motion has received limi-
ted attention (Perry & Rosen 2006) (Liszka 2006).
Lastly, pneumatic muscle actuators have been
used in a full body (Tsagarakis & Caldwell 2003)
and an upper body exoskeleton (Aida et al. 2009),
and have been shown to provide the torque required
for lifting. They work like muscles, making them
very compatible with humans. The main challenge,
however, is to make a wearable power supply.
So far it can be concluded that, using current
technology, being wearable and energetically
autonomous cannot be combined with having all
DoFs active and powerful enough to lift, e.g.,
patients. Critically, shoulder girdle motion has not
been implemented in a full body exoskeleton, and
spine motion has not received any attention at all.
1.2 Towards a New HAL
The current full body HAL suit, HAL-5, shown in
Fig. 1a, consists of frames interconnected by power
units, which each contain an electromotor and
reduction gears, positioned directly next to the hip,
knee, shoulder (flexion) and elbow joints of the
wearer to assist his movements. Additional passive
DoFs are located at each shoulder, upper arm, and
ankle joint. The suit is powered by batteries.
The system is controlled according to the
intentions of the wearer, which are obtained by
measuring the bioelectric signal (BES) on the skin
above the main flexor and extensor muscles
associated with each augmented human joint. Motor
torques are calculated according to these signals.
It is expected that similar control techniques and
actuators will be used in the new version. In addition,
the wearer is assumed to be a healthy person.
Considering the found limitations and the aim to
aid nurses, a new design approach for HAL should:
1) Achieve the most practicality given limited
technology;
2) Enable handling of patients by nurses, by
supporting the forces typically exerted by them.
The word ‘practicality’ in the first goal implies
“fitted for actual work or activities”, and is
considered the main property to ensures HAL’s
usability in our human society.
2 A DIFFERENT APPROACH
2.1 Challenges
These goals inevitably pose several specific
challenges. Firstly, not actuating some DoFs in order
to save weight and power poses the dilemma of
creating either passive DoF or a fixed structure
instead. Passive means that the wearer will
occasionally be required to exert a high degree of
effort to handle heavy objects, whereas fixing
reduces the human workspace and can result in high
forces between the wearer and the robot.
When considering the practical usage of an
exoskeleton it may be seen that both during daily
tasks (Rosen et al. 2005) and during working (Vieira
& Kumar 2004) gravity forces are the most
prevalent. Although several exoskeletons
specifically counter the forces of gravity during
lifting (Suzuki et al. 2005) (Yamamoto, 2002)
(Toyama, 2009), this focus also strongly limits the
workspace by limiting various DoFs. Moreover, the
loads should never be transferred from the suit to the
wearer. E.g., as will be shown in section 4, the load
supported by the suit may bear upon the wearer’s
body during walking. Some guarantee that the suit
BIODEVICES 2010 - International Conference on Biomedical Electronics and Devices
134

compensates gravity and transfers its weight and that
of the carried load directly to the floor is necessary.
Considering patient-handling by nurses it can be
seen that pushing and pulling forces are prevalent as
well, e.g., when turning a patient around in bed
(Schibye et al., 2003). A practical exoskeleton will
thus have to be able to support these forces as well.
Next, skin irritation around fastening equipment
is a problem not often considered during design, but
mostly revealed by experiments (Hidler & Wall
2005) (Colombo et al. 2000). Schiele and Van der
Helm (2006) showed how this partly arises from un-
avoidable misalignments between wearer and robot.
Regarding augmentation of the hands, which
would be necessary for picking up heavy objects, it
can be seen that only some fully actuated arms have
wrist actuators (Schiele & Van der Helm 2006)
(Folgheraiter et al. 2009) (Perry & Rosen 2006)
whereas for the fingers there are only rehabilitation
devices (Sasaki et al. 2004) (Mulas et al. 2005).
Unfortunately, all these devices also indicate that it
is very difficult to augment fingers up to a practical
load of around 25kg for one hand.
Lastly, implementing shoulder girdle and spine
movability requires two DoFs for each shoulder and
three for the spine, totalling seven extra actuators.
This would almost double the amount on HAL.
2.2 A Human Practical Approach
Exoskeletal structures are typically designed using a
machine approach, basing the design on the range of
motion (RoM) and torques of the human joints that
they interact with. For wearable robot suits it seems
that with this approach current challenges cannot be
overcome. On the other hand, the ways we use our
bodies for work reveal characteristics that may
provide unknown design opportunities.
In order to discover new solutions this paper
posits that, although the number of postures and
motions that may be achieved with the many DoFs
our bodies provide is very large, we only use a
limited subset of them in our daily lives and work
because they are somehow optimal. If a robot suit
can support this limited, practical set of postures and
motions, then it may be considered sufficient.
To illustrate, it is possible for people to eat while
maintaining their elbows at shoulder height. People
generally avoid this because it is tiring. It is not
practical. A practical design approach would
therefore consider what the wearer actually needs,
wants, and does when wearing an exoskeleton.
What the wearer primarily needs is gravity
compensation and the ability to move in ways that
tasks may be performed as desired, without feeling
the weight of the suit. Also, the suit must know the
wearer’s intentions, as was realized with HAL’s
intention based control.
In particular the motions that are desirable or
biomechanically optimal or motions otherwise used
in practice enable new solutions by requiring HAL
to assist only certain, instead of all possible activities.
E.g., the way an object is lifted reveals where and
when augmentation is required. This is discussed
further in the next section.
3 A SEMI-ACTIVE EXO-SPINE
3.1 Unified DoFs
Heavy objects, or patients, are generally too large to
hold on one side and are usually held in front of the
wearer. Additionally, holding heavy objects on the
side with one hand is unbalancing during walking
and is not doable beyond normal human strength
without sufficient hand augmentation, which, as
mentioned, does not exist.
When lifting objects in front the various muscles
activated in the hips and back compose several DoFs.
However, observing how they are activated, as
shown in Fig. 1a, it can be seen that in the hips and
back the moments are all generated in the same
direction. They act as a single unified DoF.
Some validation can be obtained from Fig. 1b.
By separating the trunk, pelvis, and legs the
interaction forces can be drawn schematically. This
shows that during lifting - knowing that no other
external forces are applied to the pelvis - the
direction of the moments in the hips must always be
the same as throughout the spine. Additionally, this
also holds when pushing forward or pulling
backward. For ease of reference, this inter-
dependence will be referred to as the ‘lifting DoF’.
Extending this concept, it may be seen that
adduction and abduction of the shoulder girdle can
be included. Abduction is connected to spine flexion,
particularly when the body bends down to pick
something up, as well as when pushing, and
shoulder adduction is connected with spine
extension during both lifting and pulling.
3.2 Semi-Active DoFs
It is possible to achieve a similar interdependency in
the exoskeleton by using a semi-active DoF. This is
a passive DoF driven by an active DoF.
PRACTICAL DESIGN OF FULL BODY EXOSKELETONS - Stretching the Limits of Weight and Power
135
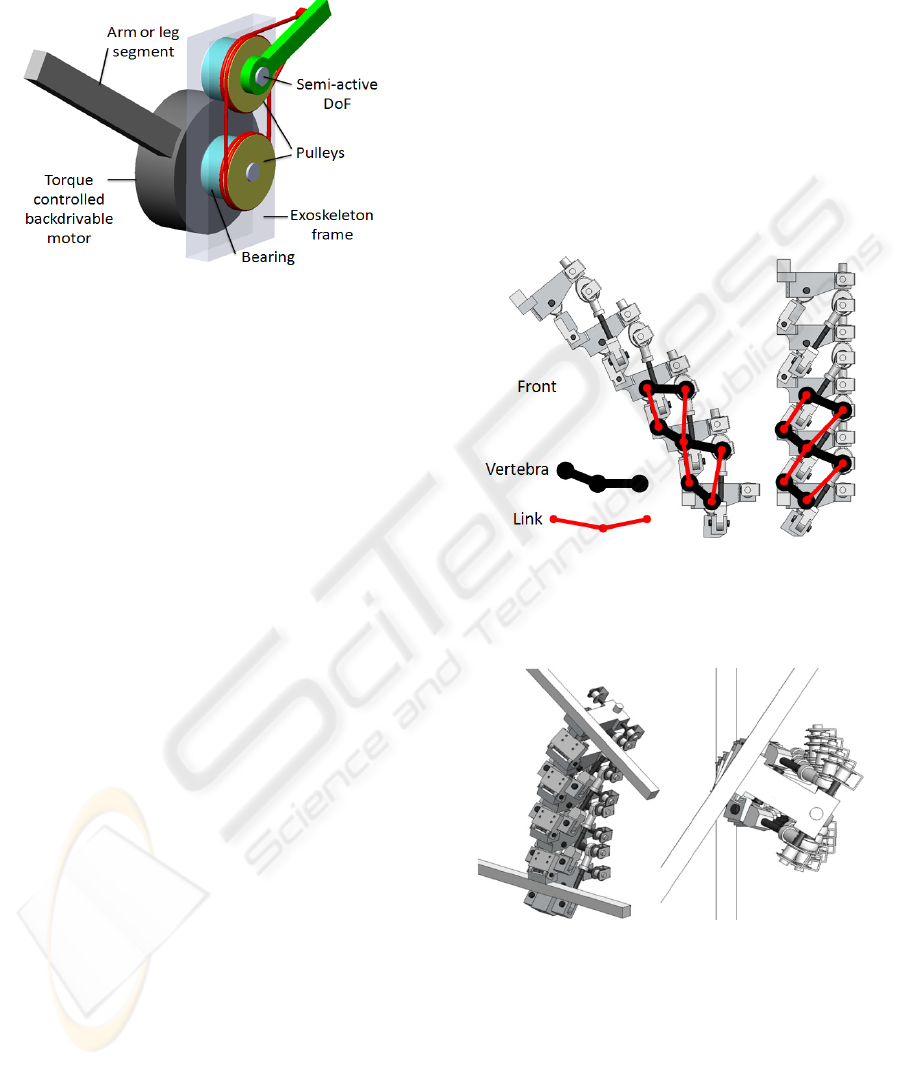
Fig. 2 shows this concept schematically. Normally
the stator of a HAL-5 motor moves an arm or leg
segment while the axis is fixed to the exoskeleton
Figure 2: Placing bearings between the exoskeleton frame
(transparent) and the axis of a hip (or other) motor while
fixing the axis to a pulley, enables the pulley to drive a
second, passive joint that thus becomes semi-active.
trunk frame. The axis may instead be connected to a
pulley, and be allowed to rotate freely w.r.t. the
frame using a bearing. This pulley then drives an
otherwise passive joint through cables and a second
pulley at this passive joint, much like a common
cable actuation system. The torques in the active and
the semi-active DoFs are interrelated at any time,
thereby creating the desired interdependency.
The motor is, as in HAL-5, torque controlled
according to the BES of the wearer’s muscles. When
applying a semi-active DoF mechanism to assist
flexion of the exoskeleton spine, a torque controlled,
back-drivable hip motor produces the same force
balance in the exoskeleton as in the human lifting
DoF. Adding abduction of the shoulder as a second
semi-active DoF completes the robotic lifting DoF.
The moment in the human spine, however,
decreases when the wearer bends, because the
moment arm between the load and the spine, and the
moment arm between the load and the hips change
unequally. To achieve this effect with the robot, a
four-link mechanism between each hip motor and
the leg it drives may be used to increase the moment
at the robot’s legs when the legs are flexed, and thus
relatively decrease the moment in the spine.
Considering the ways we lift objects it may also
be seen that in a similar way elbow and wrist
actuation can be connected using a semi-active DoF,
thereby simplifying design.
3.3 Exo-Spine Structure
Using semi-actuation it is possible to support all
three DoFs of the spine from both hips. First, just as
the two hip moments in a human body act as one
moment on the trunk, the two axes of the two hip
motors can be connected in order to let the total
torque in this single axis act on the robot trunk.
Next, making sure that the exo-spine has a
straight neutral position, any deviation should cause
a moment that tends to restore the neutral position.
This is applicable to each spinal DoF because when
the wearer lifts something support is required in all
directions in order to pick it up while being rotated,
bend sideways or while using one hand. In effect, all
three DoFs are connected into a unified DoF that
tends to restore the neutral position.
Figure 3: Spine structure composed of vertebrae and links,
some overlaid by schematic equivalents, in fully bent and
straight positions. It extends when bending forward to
accommodate human spine flexion.
Figure 4: Side bending (a) and rotation (b) (top view) of
the spine structure. Beams were added for clarification.
A suitable spine-like mechanism is shown in
Figs. 3 and 4. The details of the design are beyond
the scope of this paper, but it can be seen that all
three DoFs of the human spine are provided. Several
vertebra-like segments and links are interconnected
by ball joints, while two synthetic cables (not
shown) connected to the axes of the hip motors pull
BIODEVICES 2010 - International Conference on Biomedical Electronics and Devices
136
the structure towards the neutral position. The cables
continue from the spine upwards to support against
shoulder girdle abduction during lifting and pulling.
The connected axes of the hips are balanced in
only one direction. In the other direction a torque-
clutch locks the axes of the motors to the frame,
depending on the direction of the combined torque
produced by the motors and the cables.
Given sufficient motor torque, the exo-spine is
analyzed using FEM to be strong enough to support
80kg at 24cm in front of the center of the wearer,
which would relieve most of a nurse’s load.
Moreover, all forces applied to the wearer pull
towards the neutral position, and hyperexten-sion is
blocked, making it safe to use. The exo-spine
requires no extra actuators, provides gravity
compensation, and supports pulling and pushing as
required, utilizing practical human mechanics.
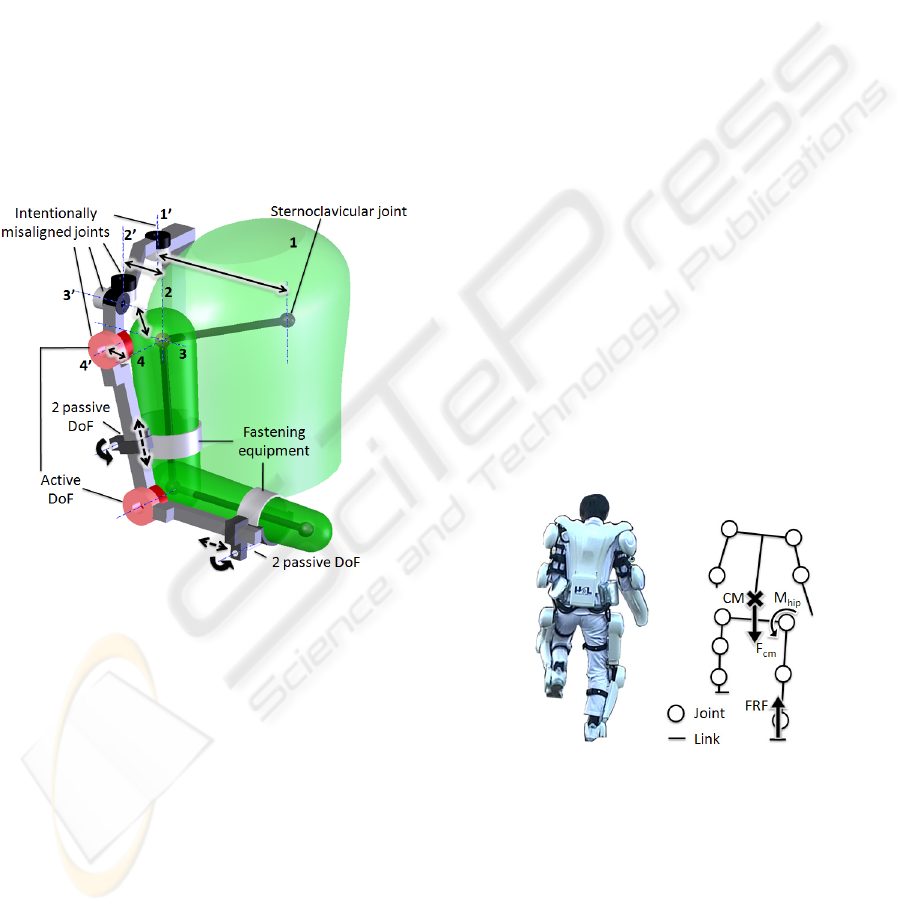
Figure 5: Schematic CAD model of the trunk and one arm.
Robotic joints 1’- 4’ do not align with the sternocla-
vicular joint (1) and the glenohumeral joint (2-4). Motions
between the human and the robot at the fastening
equipments are accommodated by extra passive DoF.
4 OTHER SOLUTIONS
4.1 Intentional Misalignment
Two passive DoF added after each active arm joint
as proposed by Schiele and Van der Helm (2006) not
only facilitate unavoidable misalignments between
the robot and human joints, they also allows larger
misalignments. Using this concept, offsetting the
three robot joints at the shoulder w.r.t. the
glenohumeral joint would create space for the
wearer’s shoulder girdle to move upward, without
the need to actuate such a DoF. This increases the
RoM of the arm, since raising the arm beyond about
90 degrees involves upward motion of the girdle.
Fig. 5 illustrates this. Robot axes 1’, 2’, 3’, and 4’
have been misaligned intentionally w.r.t. their
human counterparts. Axis 1’ facilitates girdle
abduction, supported by the same cables as the exo-
spine. It has a large misalignment, but a small RoM,
allowing it to function as desired. Due to the added
passive DoFs the moment effectively put on the
human arm for a constant motor torque differs by a
few percent according to the posture. This is often
disrupting for machines, but is not sufficient to
influence the wearer of an exoskeleton.
4.2 Gravity Compensation
The human arm has a large workspace, but only
some of the robot arm’s DoFs can be active, and
they must always be positioned such that they
compensate gravity forces when required. In general,
people often lift objects with their elbows kept down
as much as possible, e.g. as farmers do (Nevala-
Puranen 1995). Assuming this, an arrangement of
passive and active DoFs as shown in Fig. 5 would let
the output of each motor compensate gravity as
much as possible. This is because the axes of the
motors are always perpendicular both to the gravity
forces as well as to the line connecting the center of
the motor to the point where the load is applied.
(a) (b)
Figure 6: Single stance phase during stair climbing with
HAL (a). A model (b) shows how the force (F
cm
) at the
center of mass (CM) and the floor reaction force (FRF)
create a moment at the hip joint of the stance leg, M
hip
.
At the hips, forces acting from the back part of the
suit are supported by the suit’s legs. Standing on
both legs is no problem, but when walking, during
the single stance phase as shown in Fig. 6, a large
moment, about 2Nm/kg, is developed around the hip
of the stance leg. Because nurses on occasion need
PRACTICAL DESIGN OF FULL BODY EXOSKELETONS - Stretching the Limits of Weight and Power
137

to walk when lifting, these moments should be
supported. However, it is also desirable that the
wearer be able to abduct the leg. Passive joints that
only allow abduction of the legs would solve this.
5 DISCUSSION
Even with the proposed solutions the variety of
motions that can be performed with HAL is still less
than without, and limitations remain. Gravity
compensation is limited to generic postures, some
useful DoFs, such as inner rotation of the arm, are
not augmented, and the full RoMs are not achieved.
Even so, in most working situations there are
several postures available to the worker by which
the task’s goals can be achieved, and the wearer may
adapt his motion to utilize postures for which HAL
provides the most support. Since this is available in
postures humans use extensively it is very likely that,
although it should be confirmed by further research,
at any time at least one good posture can be attained.
Therefore, HAL would be valuable in a human
environment and the proposed practical design
approach thus achieved its goals. In addition, it is
expected that further practical, human characteristics
may be exploited to simplify design.
We believe that a similar practical focus may be
applied to other fields where humans and machines
meet cooperatively, such as rehabilitation, to yield
new improvements. A practical approach could
unveil solutions that enable patients to perform
particularly those motions needed for daily activities.
ACKNOWLEDGEMENTS
This work was supported in part by the Global COE
Program on “Cybernics: fusion of human, machine,
and information systems”.
REFERENCES
Aida, T., Nozaki, H. & Kobayashi, H., 2009.
“Development of Muscle Suit and Application to
Factory Laborers” Proc. IEEE Int. Conf. on
Mechatronics and Automation, China, pp.1-5.
BBC News, 2008. "US army develops robotic suits", April
16 2008, retrieved August 31, 2009, <news.bbc.co.uk
/2/hi/7351314.stm>.
Colombo, G., Joerg, M., Schreier, R. & Dietz, V., 2000.
“Treadmill training of paraplegic patients using a
robotic orthosis,” J. Rehabil. Res. Develop., vol. 37,
no. 6, pp. 693–700.
Dollar, A.M., & Herr, H., 2008. “Lower Extremity
Exoskeletons and Active Orthoses: Challenges and
State of the Art,” Transactions on Robotics, vol. 24(1).
Folgheraiter, M., Bongardt, B., Schmidt, S., De Gea, J.,
Albiez, J. & Kirchner, F., 2009. “Design of an Arm
Exoskeleton Using a Hybrid Model- and Motion-
Capture-Based Technique,” Interfacing the Human
and the Robot Workshop, ICRA.
Hidler, J.M. & Wall, A.E., 2005. “Alterations in muscle
activation patterns during robotic-assisted walking,”
Clin. Biomech., vol. 20, pp. 184–193.
Liszka, M.S., 2006. “Mechanical Design of a Robotic Arm
Exoskeleton for Shoulder Rehabilitation,” M.S. thesis,
Univ. of Maryland.
Mulas, M., Folgheraiter, M. & Gini, G., 2005. “An EMG-
controlled Exoskeleton for Hand Rehabilitation” Int.
Conf. on Rehabilitation Robotics, Chicago, IL, USA.
Nevala-Puranen, N., 1995. “Reduction of farmers' postural
load during occupationally oriented medical reha-
bilitation,” Applied Ergonomics, 26(6), pp. 411-415.
Perry, J.C. & Rosen, J., 2006. “Design of a 7 Degree-of-
Freedom Upper-Limb Powered Exoskeleton,” IEEE
Conf. on Biomedical Robotics and Biomechatronics.
Rosen, J., Perry, J.C., Manning, N., Burns, S. &
Hannaford, B., 2005. “The human arm kinematics and
dynamics during daily activities – toward a 7 DOF
upper limb powered exoskeleton,” Proc. 12th Intl.
Conf. on Advanced Robotics, ICAR '05, pp. 532-539.
Sasaki, D., Noritsugu, T., Takaiwa, M., & Yamamoto, H.,
2004. “Wearable power assist device for hand
grasping using pneumatic artificial rubber muscle,”
13th IEEE Int. Workshop on Robot and Human
Interactive Communication, ROMAN, pp. 655-660.
Schibye, B., Faber Hansen, A., Hye-Knudsen, C.T.,
Essendrop, M., Bocher, M. & Skotte, J., 2003,
“Biomechanical analysis of the effect of changing
patient-handling technique,” App Ergonom, 34, pp.
115-123.
Schiele, A., & Van der Helm, F.C., 2006. “Kinematic
design to improve ergonomics in human machine
interaction”, IEEE Trans Neural Syst Rehabil Eng,
14(4), 456-69.
Suzuki, K., Kawamura, Y., Hayashi, T., Sakurai, T.,
Hasegawa, Y. & Sankai, Y., 2005, "Intention-Based
Walking Support for Paraplegia Patient," Int. Conf. on
Systems, Man and Cybernetics, Hawaii, pp.2707-2713.
Toyama, S., 2009. “Wearable Agri Robot,” Toyama Lab,
retrieved August 31, 2009, <www.tuat.ac.jp/
~toyama/research_assistancesuitE.html>.
Tsagarakis, N. & Caldwell, D., 2003. “Development and
control of a soft-actuated exoskeleton for use in
physiotherapy and training,” Autonomous Robots, vol.
15, pp. 21–33.
Vieira, E.R. & Kumar, S., 2004 “Working postures: a
literature review,” J Occup Rehabil, 14(2), pp. 143-59.
Yamamoto, K., Hyodo, K., Ishi, M. & Matsuo, T., 2002.
“Development of power assisting suit for assisting
nurse labor,” JSME Int. J., Series C: Mechanical
Systems, Machine Elements and Manufacturing, v 45,
n 3, pp. 703-711.
BIODEVICES 2010 - International Conference on Biomedical Electronics and Devices
138
