
TWO-POPULATION GENETIC ALGORITHM
An Approach to Improve the Population Diversity
M. Gestal, D. Rivero, E. Fernández, J. R. Rabuñal and J. Dorado
Department of Information and Communications Technologies, University of A Coruña, Spain
Keywords: Evolutionary Computation, Diversity, Genetic Drift.
Abstract: Genetic Algorithms (GAs) are a technique that has given good results to those problems that require a
search through a complex space of possible solutions. A key point of GAs is the necessity of maintaining
the diversity in the population. Without this diversity, the population converges and the search prematurely
stops, not being able to reach the optimal solution. This is a very common situation in GAs. This paper
proposes a modification in traditional GAs to overcome this problem, avoiding the loose of diversity in the
population. This modification allows an exhaustive search that will provide more than one valid solution in
the same execution of the algorithm.
1 INTRODUCTION
Based on natural evolution, Evolutionary
Computation (EC) tools have shown to be very
efficient techniques when solving different
problems. One of these techniques, Genetic
Algorithms (GAs), is used mainly for the
optimization of a set of parameters (Fogel, 2006).
All of the EC techniques are based on the same
principles: an initial random population is made to
evolve by means of genetic operators (crossover and
mutation) inspired in Biology.
This evolution is done until a stop criterion is
fulfilled like maximum number of generations, a
MSE threshold or the convergence of the population.
But, if the population has a low diversity, i.e. the
population is very homogeneous, resulting in having
many individuals very similar, or identical. This
leads to having the crossover operator very
inefficient, because it builds new solutions that
explore areas of the search space that have already
been explored by other solutions. Therefore, only the
mutation operator can introduce new diversity in the
population. This all leads to a big loss of efficiency
in the whole algorithm, and it is a very common
problem in GAs (Zaharie, 2003).
Another problem due to the lack of diversity
appears when problems with multiple valid solutions
(or solutions with a very similar fitness) are trying to
be solved (multimodal problems). In these cases a
traditional GA will try to keep in the populations
values corresponding only to one of these solutions.
2 EVOLUTIONARY
APPROACHES TO INCREASE
DIVERSITY
As already stated, the diversity lack leads to an
efficiency and efficacy loss. Even this diversity lack
is very common on later stages of the evolution, its
appearance on the early generations is a very
important problem that affects the whole search. To
avoid this problem, different strategies have been
proposed, most of them based on heuristics.
First, some of the approaches try to solve this
problem by means of the dynamic variation of
crossover and mutation rates (Ursem, 2002). A
diversity measure is needed to control this problem,
which allows changing dynamically the mutation
and crossover rates.
New crossover algorithms have also been
proposed to solve this problem. Some of them are
BLX (Blend Crossover), SBX (Simulated Binary
Crossover), PCS (Parent Centric Crossover), CIXL2
(Confidence Interval Based Crossover using L2
Norm), UNDX (Unimodal Normally Crossover) or
fuzzy recombination (Lozano, Herrera and Cano,
2008).
Different approaches in replacement algorithms
have also been proposed to avoid diversity loss. En
example of this is Crowding algorithm. This
635
Gestal M., Rivero D., Fernández E., Rabuñal J. and Dorado J. (2010).
TWO-POPULATION GENETIC ALGORITHM - An Approach to Improve the Population Diversity.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Artificial Intelligence, pages 635-639
DOI: 10.5220/0002760306350639
Copyright
c
SciTePress

algorithm began as a deterministic approach, but
also a probabilistic version has been published, in
which individuals compete in a probabilistic
tournament (M
engshoel and Goldberg, 2008).
Species-based are also used when the problem
requires an in-depth search over the solution space.
In this case, the solution to the lack of diversity is
simulated adding new populations, but the problem
remains within each of these populations (Nicholson
and White, 2008).
The main inconvenience of the techniques
previously described (replacement and crossover
operators) lies in the fact that they add new
parameters that should be configured according the
process of execution of GA. This process may be
disturbed by the interactions among those
parameters (Bäck, Eiben and van der Vaart, 2002).
3 TWO-POPULATION GENETIC
ALGORITHM
In this work a novel approach is presented to
preserve the genetic diversity. It tries to keep the
diversity stable by means of the use of a new
population that works as repository information.
This repository will allow the GA to be able to
create solutions all over the search space. In this
way, the population diversity does not reduce over
the time.
3.1 General Structure
The lack of diversity of the genetic population is the
key feature which will lead to improving efficacy
and efficiency. To do this, a new population is added
to the traditional GA. This population is called
genetic pool, and it forces a homogeneous search
through the search space.
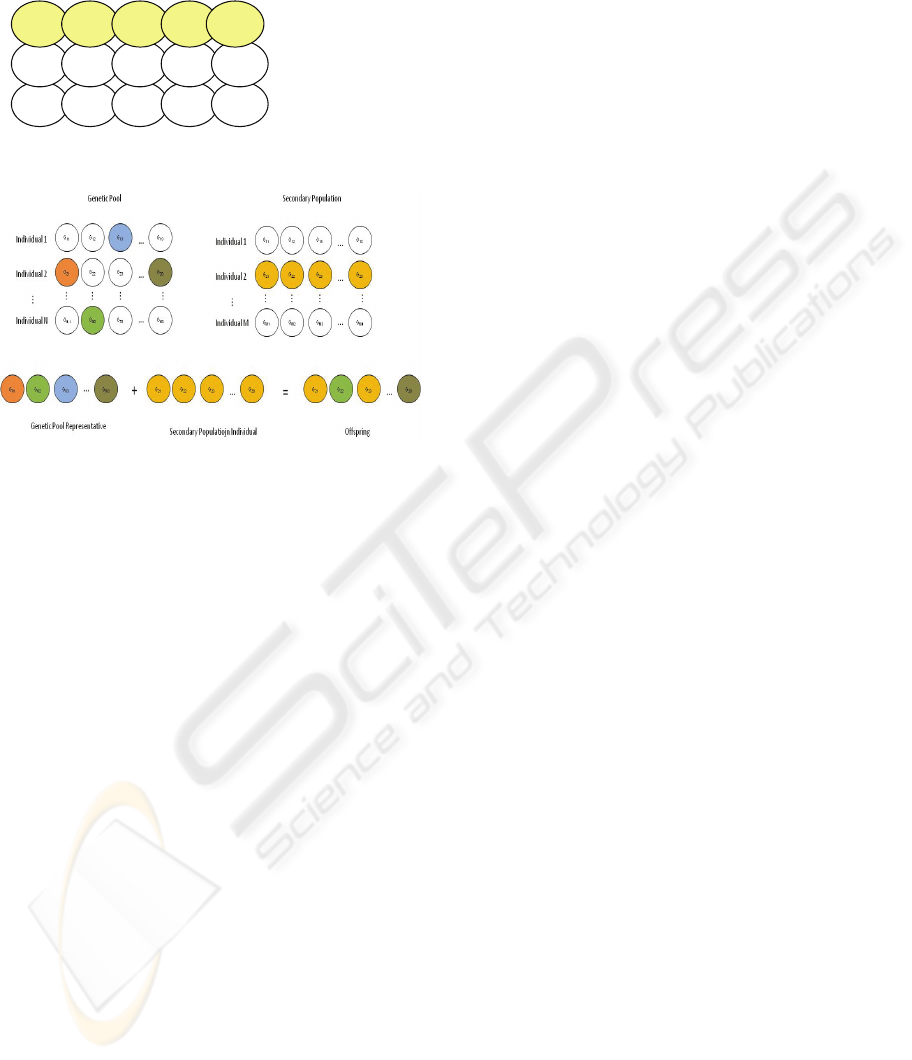
This genetic pool divides the search space into
sub-regions (see Fig. 1), because each individual has
its own fenced range for gene variation, i.e., each
gene of each individual can take values only inside a
limited rank. Therefore, each individual of the
genetic pool represents a sub-region of the search
space, and the whole search space is divided into all
of the individuals of this genetic pool.
Depending on both type and complexity of the
problem that it is intended to solve, the user has to
set the number of sub-regions that require into the
search space. It should be borne in mind that a
traditional GA performs its search only one sub-
region (the whole of the search space).
Figure 1: Sample of Genetic Pool configuration.
The secondary population works as a classical
population, i.e., no additional rank restrictions are
introduced in this population (each individual’s
genes can take values all over the search space). Its
only variation refers to the application of crossover
and mutation operators, which operate between both
populations (explained below).
This secondary population contains the solutions
to the problem, whereas the genetic pool acts as a
support, keeping the search space homogeneously
explored and a diverse population.
3.1.1 Genetic Pool
The main objective of the genetic pool is to allow
the GA to explore the whole search space with a
homogeneous search. As each individual in the
genetic pool represents a sub-region of the global
search space, it has the same structure or gene
sequence than when using a traditional GA.
But these individuals need some extra information
(see Fig. 2). First, in a traditional GA population
these genes can take any valid values, but in the
genetic pool the genes can take values only in a
restricted range (different for each individual). The
total range values are divided into the same number
of parts than individuals in genetic pool, so that a
sub-range of values is allowed to each individual.
Those values that a given gene may have will remain
within its range for the whole of the performance of
the proposed GA. Therefore, if the genetic pool has
a size of N individuals, the whole search space is
partitioned into N parts of the same size, each of
them represented by an individual of the genetic
pool.
In addition of this partition, every individual in
the genetic pool knows which of its genes are part of
the best solution found up to then, i.e., genes that
belong to the best individual in the secondary
population. This flag is used to avoid the
modification of those genes that are the best solution
to the problem.
Also, each gene in each individual in the genetic
pool has a value that indicates the relative increment
G
11
G
21
G
N.1
G
12
G
22
G
N2
Individual1
Individual2
Indiv idual10
[0..1)
[1..2)
[9..10]
[0..2)
[2..4)
[18..20]
…
…
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
636
that would be applied to the gene during a mutation
operation (the I value). This mutation operator is
described below.
Figure 2: Genetic Pool individual.
Figure 3: Crossover operation.
An important thing to bear in mind is that these
individuals do not represent global solutions to the
problem. Therefore, their fitness value is useless and
no computational time is wasted in this task.
3.1.2 Secondary Population
The individuals in the secondary population are
similar than those of a traditional GA population,
i.e., they can adopt values throughout the whole of
the solutions area. In this way, they offer global
solutions to the problem, which is something that
none of the individuals of the genetic pool is able to
do due to the range restriction. Therefore, this
population contains the solutions to the problem and
performs an evolution similar to a classical GA
population, with some differences in the genetic
operators (crossover and mutation).
3.2 Genetic Operators
3.2.1 Crossover
The crossover operator has been modified in order to
operate between individuals in the secondary
population (using complete solutions to the problem)
and the genetic pool. This operator now recombines
genetic material from two parents, each of them
from each population.
First, an individual is randomly chosen from the
secondary population. Therefore, there is no need to
have this population organized attending to the
fitness value of its individuals.
The Representative is also built from the genetic
pool. This representative is assembled by randomly
choosing the genes from the individuals of the
genetic pool (see Fig. 3).
These two individuals (the randomly chosen from
the secondary population and the representative
from the genetic pool) will be the parents in the
crossover operation. A uniform crossover is
performed between these two parents. As a result of
this crossover, only one individual is generated after
the random selection of every one of its genes from
both ancestors.
A non destructive replacement algorithm has been
used in order to insert this new individual into the
secondary population. This insertion is performed
when the fitness of the offspring is better that the
fitness of the selected parent from the secondary
population. Therefore, if the new individual
represents the new best solution, the genes of the
representative individual in the genetic pool
(Boolean values B
ij
at Fig. 2) are consequently
marked in the corresponding individuals of the
genetic pool.
3.2.2 Mutation
The mutation operator only modifies individuals in
the genetic pool. First of all, a random individual is
chosen from the genetic pool. A gene is chosen from
that individual and the specified increment value
associated to that gene is applied to it (the value I in
Fig. 2). The selected gene must not have the mark of
belonging to the best solution in the secondary
population, i.e., it should not have the Bi value
marked.
When the addition of current gene value plus the
increment exceeds the upper end of the sub-range in
which the gene may vary, this gene becomes the
lower value of the sub-range. Furthermore, if this
happens, the incremental value that is going to be
applied to subsequent mutations of that gene is also
reduced. This is done in order to perform a more
exhaustive search in all of the values that a gene
may adopt as the evolution process goes on.
4 EXPERIMENTS
In this section different experiments will show the
performance of the proposed system. A comparison
with traditional GAs is done in order to measure the
I
i1
I
i2
I
i3
…
B
i1
B
i2
B
i3
…
G
i1
G
i2
G
i3
...
I
in
B
in
G
in
Genotype
Best solution control
IncrementalMutation
Value
TWO-POPULATION GENETIC ALGORITHM - An Approach to Improve the Population Diversity
637
goodness of applying this modification to the GA.
Different problems have been solved with this
system. First of all, some synthetic problems will be
used to assess the approach functioning. They will
allow to test whether the system proposed is able to
provide several valid solutions in the same run, and,
therefore if the population does not converge to a
single individual. The performance of the algorithm
proposed and the ability of finding different
solutions is studied with these problems, in
comparison with results obtained with traditional
GAs.
The preliminary tests tried to establish the level of
convergence and exhaustive search of the new
algorithm compared to the classic GA.
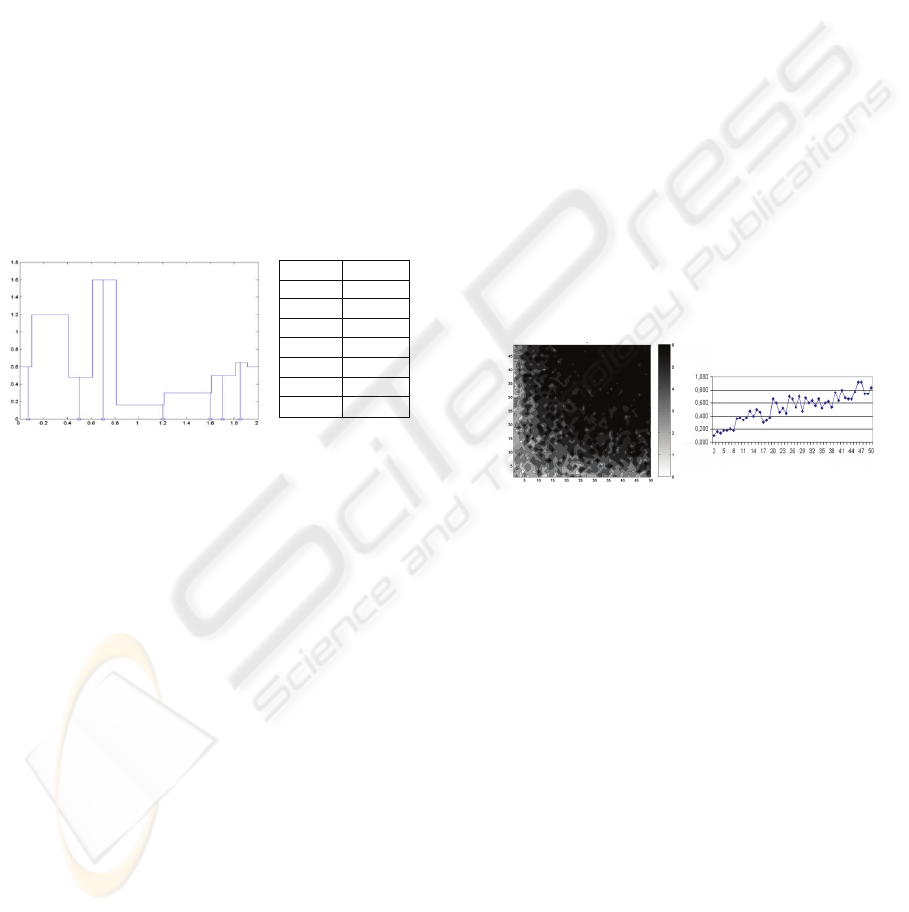
Among different test trials, the discrete function
represented in Fig. 4 was used to prove the proposed
system. This function takes values within the
interval [0..2] where several narrow local minimums
with value 0 have been added.
x f(x)
0.07 0.08
0.5 0.01
0.7 0.001
1.2 0.05
1.6 0.08
1.7 0.02
1.85 0.005
Figure 4: Test function.
Parallel executions of classical GA and the
proposed GA will be done until one of them reach a
threshold error, in this concrete case establish when
mse<0.05. Once the algorithm reach the threshold
the number of solutions kept in the solution is
annotated.
The main objective of this synthetic function is
to find out how the search space is explored in-
depth.
Each individual will codify five times the same
function, so five simultaneous runs will be
performed. It will allow to graphically checking the
minimum achieved and increase the complexity of
the individuals. To avoid possible constructive
blocks that make simpler the resolution of the
problem the fitness function will be the following
one:
Fitness = f(G
1
) + f(2-G
2
) + f(G
3
) + f(2-G
4
) + f(G
5
)
5 RESULTS
The Fig. 5 presents the results with the test function
represented in Fig 4. This graph shows the average
number of solutions kept inside the population
respect to the population size (number of
individuals). Different genetic pool sizes were taken,
from 1 to 50 individuals, and the secondary
population size also changed between 2 and 50
individuals. The population size in the classical GA
has also been changed with sizes between 2 and 50.
For each configuration 50 runs were performed and
the mean values annotated.
This figure shows that the behaviour of the two-
population GA is better to the traditional GA. Even
the efficiency of the classical GA improves with
bigger populations, it does not reach the results
achieved by the two-population GA. More precisely,
the average number of solutions in the population of
the two-population GA was 5.5048 (over 7 possible
different solutions), while the average number in the
traditional GA was only 0.5216 (with a maximum in
0.92).
Figure 5: Population sizes and solutions found.
6 CONCLUSIONS
Several conclusions can be drawn from the results
obtained with the use of the system proposal. The
most important one is that it was able to keep the
population diversity over the execution of the
algorithm, the start point of this work. In the
problems presented, this behaviour allowed to keep
a number of solutions in the population greater than
the classical GA. So, the approach seems a
promising line where interesting results can be
finding.
In the proposed system the number of regions on
the genetic pool is fixed in advance. It would be
good to investigate different ways to allow it to
change dynamically. So, new operators (like region
gathering, division) would be interesting to explore.
Individuals within Genetic Pool
Individualswithin Secundary Population
Population Size
Solutions Found for the Two-Population GA
Genetic Pool Size
Secondary Population Size
Population Size
Solutions Found for the Classical GA
Local Minimums
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
638

REFERENCES
Bäck, T., Eiben, A.E., van der Vaart, N.A.L., 2002. An
Empirical Study on Gas Without Parameters, In
Proceedings of the 6th International Conference on
Parallel Problem Solving from Nature, p.315-324.
Fogel, F., 2006. Evolutionary Computation: toward a new
philosophy of machine learning. IEEE Press.
Lozano, M., Herrera, F., Cano, J.R., 2008. “Replacement
strategies to preserve useful diversity in steady-state
genetic algorithms”. Information Sciences, 178(23),
pp. 4421-4433.
Mengshoel, O.J, Goldberg, D.E., 2008. “The crowding
approach to niching in genetic algorithms”.
Evolutionary Computation, 16(3), pp 315-354.
Nicholson, J., White, M., 2008. Maintaining population
diversity by maintaining family structures.
Proceedings of 10th annual conference on Genetic and
evolutionary computation, pp. 533-534.
Ursem, R.K., 2002. Diversity-Guided Evolutionary
Algorithms, In Proceedings of VII Parallel Problem
Solving from Nature, pp. 462-471.
Zaharie, D., 2003. Control of population diversity and
adaptation in differential evolution algorithms. In
Proceedings of 9th International Conference Soft
Computing, Czech Republic, pp. 41–46.
TWO-POPULATION GENETIC ALGORITHM - An Approach to Improve the Population Diversity
639
