
THE ROLE OF SEQUENCES FOR INCREMENTAL LEARNING
Susanne Wenzel
Institute of Geodesy and Geoinformation, Department of Photogrammetry, University of Bonn, Germany
Lothar Hotz
HITeC e.V. c/o Department of Computer Science, University of Hamburg, Germany
Keywords:
Incremental learning, Ordering effects, Version space learning, Scene interpretation.
Abstract:
In this paper, we point out the role of sequences of samples for training an incremental learning method. We
define characteristics of incremental learning methods to describe the influence of sample ordering on the
performance of a learned model. We show the influence of sequence for two different types of incremental
learning. One is aimed on learning structural models, the other on learning models to discriminate object
classes. In both cases, we show the possibility to find good sequences before starting the training.
1 INTRODUCTION
For the purpose of scene interpretation, e. g. the in-
terpretation of facade images it is impossible to cap-
ture the huge variability of facades with one dataset.
Instead we need a continuous learning system that is
able to improve already learned models using new ex-
amples. This process in principle does not stop. For
this intention of infinitely long learning, there exists a
number of incremental learning methods. But one can
easily show that the performance of these methods de-
pends on the order of examples for training, also this
is not mentioned by most other authors.
Imagine little kids, they are sophisticated incre-
mental learners. They permanently increase their
knowledge just by observing their surrounding. But
obviously they learn much better when examples are
presented in a meaningful order.
Therefore teachers design a curriculum for teach-
ing their pupils in the beginning of a school year.
This way they ensure that the topics are presented to
the pupils in a well structured order depending of the
complexity and challenge of each single topic.
In this paper, we want to point out the relevance
of sequence for training incremental learning meth-
ods. Furthermore, we want to show the possibility
to define curricula for training incremental learning
methods. That means, we want to define good se-
quences of examples to train such methods such that
they always perform best.
We show this by means of two different learning
methods. One is aimed on learning models to discrim-
inative object classes. The other is based on Version
Space Learning and aims on structural learning.
Existing work about ordering effects in incremen-
tal learning is quite rare. A good overview of exist-
ing work and results in this field is given by (Langley,
1995).
(Fisher, 1987) proposed with COBWEB an unsu-
pervised incremental learning method based on hier-
archical conceptual clustering. He already mentioned
the role of sequence for training.
In the following some other authors try to over-
come this problem. (Talavera and Roure, 1998) in-
troduced a buffering strategy, where they store diffi-
cult examples for later evaluation. Thus, they post-
pone their evaluation to a more qualified state of the
learned model. But this can lead to an oversized sam-
ple storage. This means just collecting all examples
and evaluating them in a batch procedure. (McKusick
and Langley, 1991) made some empirical experiments
on ACHACHNE, a modification of COBWEB. For
this algorithm they got good results by choosing ex-
amples altering from all classes instead of a sequence
of samples from single classes.
Recently, the term curriculum learning was used
by (Bengio et al., 2009) for finding sequences for
training neural networks.
The rest of the paper is structured as follows. We
first characterize incremental learning methods re-
434
Wenzel S. and Hotz L. (2010).
THE ROLE OF SEQUENCES FOR INCREMENTAL LEARNING.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Artificial Intelligence, pages 434-439
DOI: 10.5220/0002762604340439
Copyright
c
SciTePress

garding the effects of sample ordering in Section 2.
Thereafter, we start description of ordering effects
on learning models to discriminate object classes in
Section 3. Here, we propose experiments to explore
these effects and propose a method to define suitable
class sequences for training based on the estimate of
bounds of the Bayes error in Section 3.2. Section 4
argues on the role of sequences for learning structural
models.
2 CHARACTERIZING
INCREMENTAL LEARNING
METHODS
To characterize a certain learning method we need to
provide a measure for success. In this work, we mea-
sure performance in terms of the error rate related to
number of samples used for learning so far to char-
acterize the performance of an incremental learning
method. This depend on various conditions, e. g. the
classes, the samples, the classifier, and possibly the
sequence of samples.
A further measure used in this work is the number
of examples k that are used by a learning method for
correctly interpreting a fixed number n of given exam-
ples. The goal would be to minimize the number of
needed examples k through selecting a best sequence
of examples.
As main characteristic of an incremental learning
method we define its dependence on the training se-
quence as follows:
Definition 2.1: Ordering sensitivity. We call an
incremental learning method ordering sensitive, if its
performance is effected by the sequence of training
examples.
In other words if there exist a training sequence
that yields a different curve of error rates or a differ-
ent number of examples than the method is ordering
sensitive.
Now, one might tend to use this to decide whether
a learning method is good or not. Thus, one could say
a good incremental learning method is not effected by
the training sequence, thus, is not ordering sensitive
(Giraud-Carrier, 2000).
But we argue vice versa. If a method is ordering
sensitive and we can assume that we are able to iden-
tify the best training sequence, thus, getting always
the best performance for this method, then we possi-
bly can outperform any method that is not ordering
sensitive.
3 THE ROLE OF SEQUENCES
WHEN LEARNING OBJECT
CLASSES
In this section, the goal of learning is identifying and
discriminating instances of classes.
In the following, we will concentrate on the
qualitative characteristics of an incremental learning
method, thus, the classification power measured in
terms of error rates.
To measure ordering sensitivity, we just train a
method with several sequences of training samples
and record the error rates per used sample. The vari-
ance of these error rates indicates the ordering sensi-
tivity. The higher the variance of error rates the higher
the ordering sensitivity.
We need to distinguish to different training sce-
narios.
1. Over the whole training sequence there are sam-
ples from all classes simultaneously available.
2. Samples from different classes become available
sequentially, one class after the other.
In the first case, we ask whether there is an influ-
ence of the training sequence at all, thus, over all sam-
ples from all classes. Here, one can imagine either
to start with some very typical examples from each
class and increase their complexity afterwards. Or
vice versa start with complex examples to rapidly fill
the feature space. Obviously the best strategy strongly
depends on the used method.
For the second case, we assume the possibility to
learn one class after the other, i. e. all about number
windows followed by all about doors and so on. The
question is, which class sequence is suited to learn
most about facade elements. We call ordering sensi-
tivity in the 2nd scenario class ordering sensitivity.
3.1 Experiments to Explore Ordering
Effects
Figure 1: Mean images per class of samples from used dig-
its dataset.
To investigate possible ordering effects we have used
the dataset of handwritten digits from (Seewald,
2005). These are handwritten numbers form 0 to 9,
thus, 10 classes. That are intensity images, normal-
ized to 16 × 16 pixel. Per class there are 190 samples
for training and 180 for testing, thus, 3700 images
in total. Figure 1 shows mean images for each class
THE ROLE OF SEQUENCES FOR INCREMENTAL LEARNING
435
of these dataset. As features, we use HOG-Features
(Dalal and Triggs, 2005).
As learning method we use an incremental formu-
lation of Linear Discriminant Analysis (LDA), called
iLDAaPCA as it is described by (Uray et al., 2007).
This is a combination of two linear subspace methods,
an incremental Principal Component Analysis (PCA)
and the LDA, thus, uses the generative power of PCA
and the discriminative power of LDA. Whereby the
use of PCA enables the incremental update of the
LDA space.
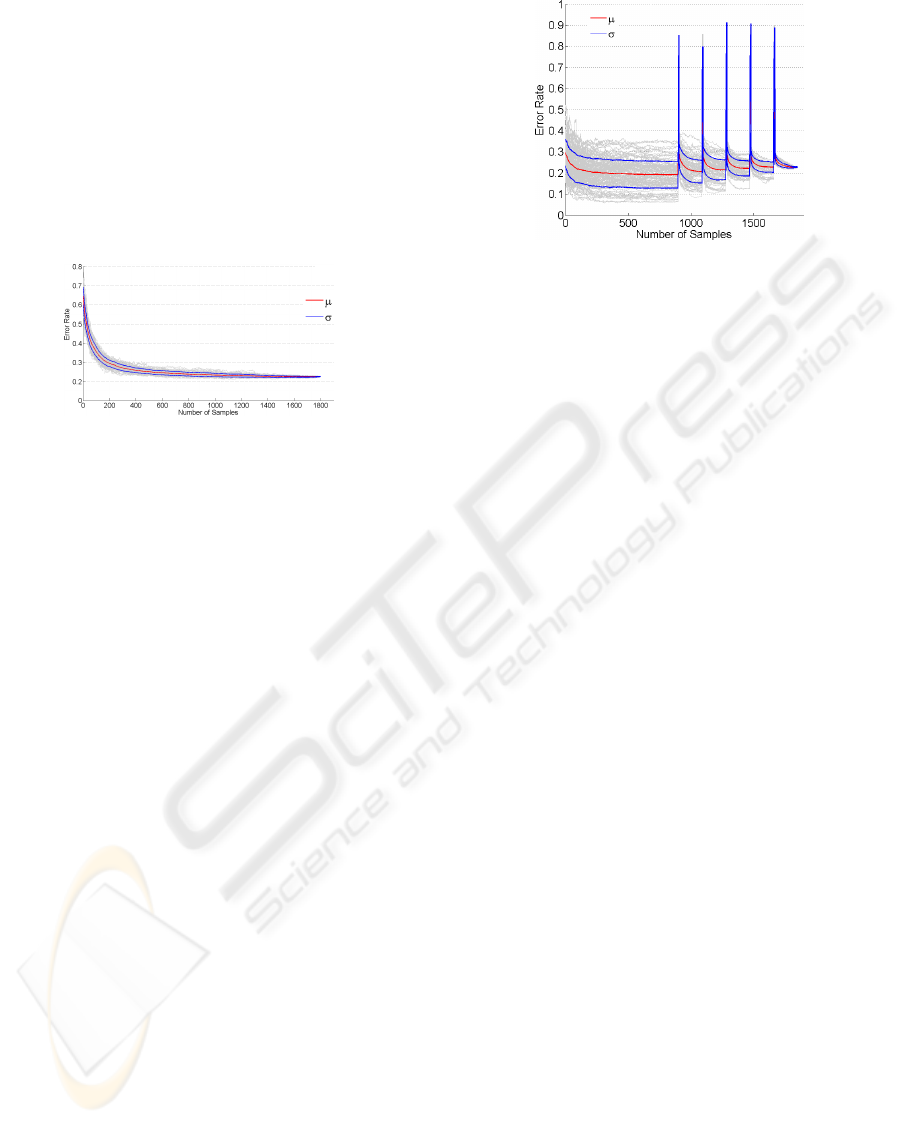
Figure 2: Ordering Sensitivity. Results of experiments with
100 different training sequences with samples randomly
chosen from all classes. The graph shows error rates vs.
number of used samples. Gray: error rates of each individ-
ual sequence, red: mean error rate of the according experi-
ment, blue: standard deviation of the according experiment.
Experiment 1: Sequences Including Samples from
all Classes. First, we need to know, if an incre-
mental learning method is ordering sensitive. There-
fore, we just try different sequences of training sam-
ples. For each new sample, we update the learned
model, evaluate it on the test set and record the error
rate. This way we get a curve of error rates depend-
ing on the number of used samples. The variance of
these error rates over the whole sequence indicates the
sensitivity against the training sequence. Results are
shown in Figure 2.
The variances of gray curves, which are the indi-
vidual curves of error rates, show the great sensitivity
with respect to the ordering of training samples.
We observe a decrease of variances down to equal
results of 23% error rate for all trials after processing
all samples.
Experiment 2: Special Ordering of Classes. The
second type of experiments tries to evaluate the de-
pendency of ordering the classes during training. As-
sume training samples of different classes become
available over time, thus, we start training with some
initial classes and add samples of a new class after-
wards. Hence, the experiment is defined with first
choosing the classes randomly and second choose the
order of samples of this class again randomly. Results
are shown in Figure 3.
Figure 3: Class ordering sensitivity for 100 different order-
ings of learned classes. Same meaning of axes and lines
as in Figure 2. Here we started with samples from 5 ran-
domly chosen classes and continued with samples from new
classes afterwards.
Here, we started sequential training with samples
from 5 randomly chosen classes out of 10. Then,
we added samples from single again randomly cho-
sen new classes. At this point, the error rates increase
drastically. This is caused by the fact that one new
sample from a new class is not sufficient to train the
model on this new class, thus, the evaluation on the
test set fails on this class. But by adding more samples
from the new class the model becomes better and the
error rates decreases again. The overall performance
decreases a bit with every new class as the complexity
of the classification problem increases with the num-
ber of classes.
Again, we observe a high variability of error rates
between different trials with different class sequences.
During the initialisation this goes up to 30%. Again,
we reach same results for each trial after processing
all samples.
Hence, the result of this experiment shows a
strong relation between class sequence and the per-
formance of the learned model. Furthermore, it might
be possible to use less samples when using the best
sequence of classes, as the best possible error rate
is already reached after using just a part of available
samples.
Of course, at the end we get same results inde-
pendent of the used training sequence. It tells: this
method behaves well, thus, we have learned the same
model after processing all available training samples.
But on the other hand, with the scenario of life long
learning we will never reach that end, the point, were
we have seen all possible examples. Hence, the re-
sults of this experiments show the significance of hav-
ing a curriculum, i. e. we need to know the best or-
der of examples before starting the training.This way
we would have an error rate always on bottom of the
graph in Figure 3, hence, always reach best possible
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
436
performance.
We are now able to characterize an incremental
learning method in the sense of ordering sensitivity
regarding samples from all classes or regarding the
order of classes. However, by now we need to know
how to define the best sequence for training. The
following section proposes one criterion to choose a
good sequence of classes just depending on the data.
Up to now, we have not found a similar criterion
to get best suited within class sequences.
3.2 How to Define a Curriculum?
The task now is to find from all permutations of ex-
amples the one that produces the best performance.
Related to the property of class ordering sensitivity of
an incremental learning method defined in Section 2
we propose here a way to get good training sequences
regarding this property.
For this purpose, we considered different mea-
sures for separating classes, e. g. distance measures
as the Kullback-Leibler-distance or the Bhattacharyya
distance. But both assume knowledge about the un-
derlying class generating distributions. We do not
want to make any assumptions about that. Hence, we
looked for criteria that are independent from any as-
sumption about the data distribution.
For this, we found the Bayes error as a general
measure for the separability of classes that can be es-
timated without any knowledge about the data distri-
bution. Thus, it defines the best achievable error rate
in a classification procedure. We can estimate bounds
of the Bayes error using the k-nearest-neighbour clas-
sificator. This is shown by (Fukunaga, 1972, chap. 6).
We did some experiments that we do not report in
detail, at which we compared the error rates of dif-
ferent class sequences with the according bounds of
Bayes error. Our empirical results indicate a strong
relation between the Bayes error and the performance
of an incremental learning method given a particular
training sequence. We got good results in terms of
error rates using the following two rules:
• Choose class combinations for initialisation with
lowest bounds of Bayes error.
• Choose remaining classes with lowest bounds of
Bayes error regarding the complete set of learned
classes up to now.
In order to estimate good class sequences accord-
ing this rules, which are just based on the data, we
have used a greedy search procedure. Thereby we
estimate bounds of Bayes error for all possible com-
binations of classes and search for sequences with
the overall best performance. For description of the
whole procedure see (Wenzel and F
¨
orstner, 2009).
The resulting list L consists of pairs of
sets {initialisation classes, single classes to add}.
Thereby the number of initialisation classes increases
from 2 to any number M of classes that is still suited
to initialise the learning method.
Experiment 3: Confirm Best Class Sequence of
Classes Determined from Bounds of Bayes Error.
We used the greedy search to find good sequences for
our test dataset of handwritten digits. This results in
lists of good class sequences which are shown in de-
tail in (Wenzel and F
¨
orstner, 2009).
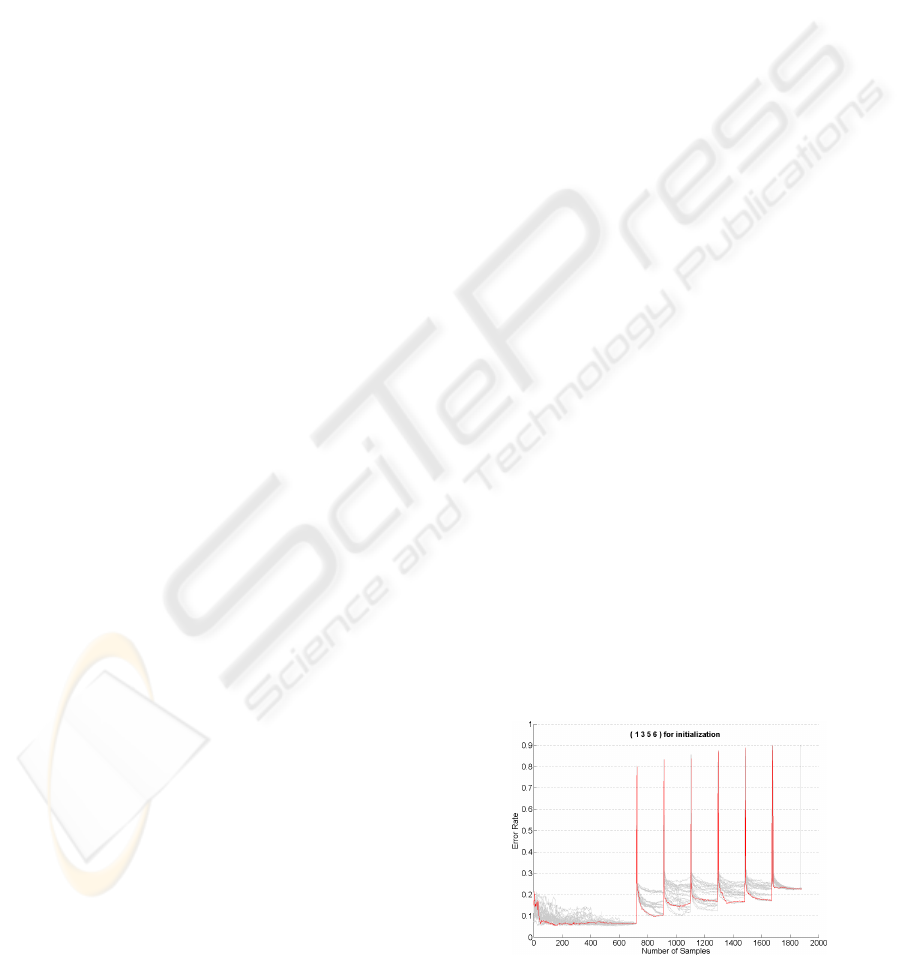
To verify this way of getting good class sequences
we show the results of one selected experiment,
shown in Figure 4. Primarily the experiment is de-
fined as described in Section 3.1. Again, we trained
the learning method with different randomly chosen
sequences of classes. We started training with a fixed
set of classes based on the results of searching for
good sequence. Here we used classes 1, 3, 5, 6 for
initialisation. In addition to the randomly chosen se-
quences afterwards we did an additional trial where
we continued with classes 4, 2, 9, 7, 8, 10, which was
one of 11 found suited sequences. The error rates of
this trial is shown as red line in Figure 4. Again, more
results, for other sequences found by greedy search
can be found in (Wenzel and F
¨
orstner, 2009).
In fact, we get always almost best performance for
classes sequences given by the bounds of Bayes error.
First, we observe that error rates from all trials
during the initialisation are on the bottom area of
those from Experiment 2, shown in Figure 3.
Second, after initialisation, thus, when adding
samples from new classes, error rates from previous
defined class sequences are always almost below er-
ror rates from random trials, shown as gray lines.
Hence, with the estimate of bounds of the Bayes
error we actually have found an appropriate indicator
for finding good sequences of classes for training an
incremental learning method.
Figure 4: Results of testing predefined class ordering. Ex-
periment with a fixed set of classes for initialisation.
THE ROLE OF SEQUENCES FOR INCREMENTAL LEARNING
437

4 COMPUTING THE BEST
IMAGE SEQUENCE
For the next experiment, we use a Version Space
Learning (VSL) module for exploring good se-
quences of examples. These experiments are pro-
cessed in the domain of interpreting facade scenes
(Foerstner, 2007). By giving annotated primitive ob-
jects like door, railing, and window the interpreta-
tion system will combine those to aggregates like bal-
conies or entrances. Models describing spatial rela-
tions, number, type, and size of parts of aggregates
are learned through the VSL method.
Learning Method. The VSL module generates a set
of possible concept hypotheses for positive examples
of a given aggregate (see (Mitchell, 1977)). A concept
hypothesis represents a possible conceptual descrip-
tion of real-world aggregates presented as learning
examples. By increasing the example set, a concept
hypothesis might change. In VSL, the space of pos-
sible concept hypotheses V S is implicitly represented
through an upper and a lower bound on their gener-
ality. The General Boundary GB contains all maxi-
mally general members of V S, the Specific Boundary
SB contains all maximally specific members of V S.
Experiment. For analysing the influence of the or-
der of presented examples on the number of needed
examples, we processed the following experiment.
Given a set S of 8 images, where each has a num-
ber of examples of the aggregate balcony (see Figure
5). Each sequence of images induced a certain num-
ber k of examples that are needed for recognizing all
balconies in the images. In general, one could create
every sequence, count k for each sequence, and select
the one with the smallest k. This can of course lead
to a large number of computations. By introducing
following improvements to this brute-force approach,
we reduced the needed effort:
• For a subsequence like
[F074 F072 F058 F057 F041], the resulting
conceptual models are stored.
• If two subsequence s
1
and s
2
of S have
a common starting subsequence s
s
(e.g.
s
1
= [F074 F072 F058 F057 F041] and
s
2
= [F074 F072 F058 F057 F036] have
s
s
= [F074 F072 F058 F057] as a common
starting subsequence) this subsequence have to
be interpreted only once. We say s
1
and s
2
are
follow-ups of s
s
. This reduces the effort for
determining k for s
1
and s
2
.
F074
F073
F072
F064
F058
F036
F041
F057
Figure 5: Images with annotated primitives (framed).
• If a best order s
l
is found for a subsequence of a
certain length l, a next image i is taken and po-
sitioned after each image of s
b
, thus, leading to
subsequences of length l + 1. For each s
l+1
k is
computed by taking follow-ups into account. In
other words, the i
n
is moved from start to the end
of s
l
. For each subsequences of a certain length, a
minimum k
m
is stored. Thus, if k of a subsequence
of that length exceeds k
m
, one can interrupt fur-
ther computations of that subsequence. This re-
duces the number of sequences needed for inter-
pretation.
In Figure 6, two subsequences are presented with
k = 12 and k = 11. The difference is the order of
the last two images, which determines that the right
ordering is better than the left one.
For the images in Figure 5, we compute the final
ordering shown in Figure 7.
Discussion. The experiment shows that the order of
presented examples is crucial for the number of iter-
ations needed for learning a certain aggregate. The
most important criterion seems to be an early set of
examples covering a preferably large variety of ag-
gregate instances. Furthermore, if this early set con-
tains examples which cover extrem properties, like
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
438
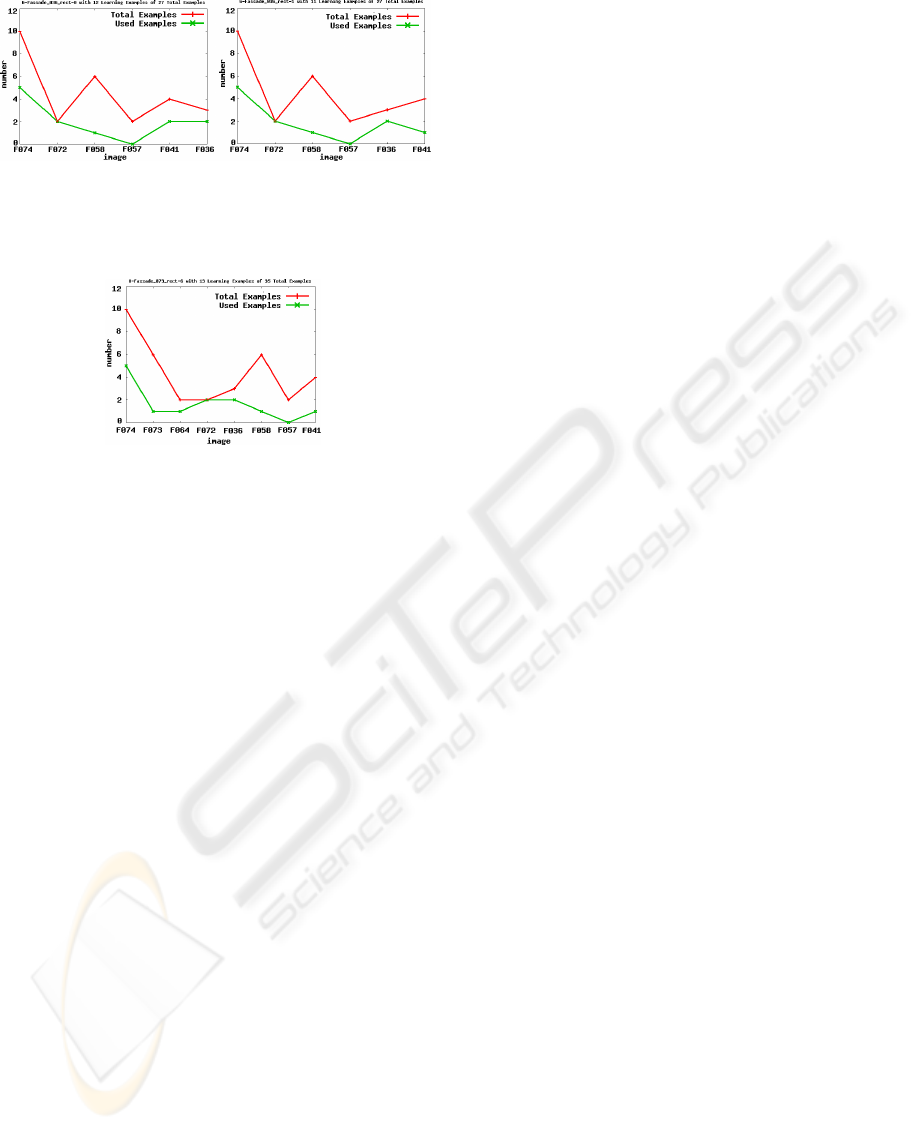
Figure 6: Example for reduced number of examples: when
learning from F036 in F041 only one example is used for
learning, if F036 does not precede F041 (left diagram) two
examples are taken from F041.
Figure 7: Sequence for the given images which uses fewest
examples for learning.
small and large objects, smallest and largest number
of a certain object type, the number of iterations is re-
duced. This is strongly related to the generalization
method of the learning module which creates con-
cept descriptions which cover all presented examples.
If extremes are selected, regular examples are cov-
ered through this generalization. This does not only
hold for size and number restrictions but also for spa-
tial relations. Because spatial relations are organized
in a taxonomical hierarchy, generalizing relations be-
tween objects of distinct examples lead to the com-
putation of the least common subsumes (lcs) of these
relations. If the lcs has low taxonomical depth, it will
cover more examples which may come up in future
iterations.
5 CONCLUSIONS
In this work, we have shown the relevance of sample
ordering for training on the performance of an incre-
mental learning method. We called this effect the or-
dering sensitivity of an incremental learning method.
We have shown experiments to evaluate ordering
sensitivity related to the tasks of learning models for
object classification and learning structural models
describing spatial relations. For the task to find good
class sequences for training a classification model, we
have shown the possibility to get those sequences be-
forehand just based on the data. Therefore, we iden-
tified the Bayes error as appropriate measure to find
class sequences that cause best possible error rates.
For learning structural models we found rules to
empirically describe good image sequences. This
way, we can achieve always best performance given
a particular learning method. Furthermore, we can re-
duce the number of samples for learning if the error
rate during training a particular class does not drop
anymore.
Thus, we have shown the relevance of curriculum
learning that should be investigated on any type of in-
cremental learning methods. Further research should
concentrate on finding more measures to define cur-
ricula before starting training just based on the data
but related to the particular learning method.
REFERENCES
Bengio, Y., Louradour, J., Collobert, R., and Weston, J.
(2009). Curriculum learning. In Bottou, L. and
Littman, M., editors, ICML’09, pages 41–48, Mon-
treal. Omnipress.
Dalal, N. and Triggs, B. (2005). Histograms of oriented gra-
dients for human detection. In CVPR’05, volume 1,
pages 886–893. IEEE Computer Society.
Fisher, D. H. (1987). Knowledge acquisition via incre-
mental conceptual clustering. Machine Learning,
2(2):139–172.
Foerstner, W. (2007). Annotated image database. eTRIMS
EU-Project, Deliverable D1.1.
Fukunaga, K. (1972). Introduction to Statistical Pattern
Recognition. Academic Press, first edition.
Giraud-Carrier, C. (2000). A note on the utility of incre-
mental learning. AI Communications, 13(4):215–223.
Langley, P. (1995). Order effects in incremental learning.
Learning in humans and machines: Towards an inter-
disciplinary learning science.
McKusick, K. B. and Langley, P. (1991). Constraints on tree
structure in concept formation. In IJCAI’91, pages
810–816.
Mitchell, T. (1977). Version spaces: A candidate elimina-
tion approach for rule learning. In IJCAI’77, pages
305–310.
Seewald, A. K. (2005). Digits - a dataset for handwritten
digit recognition. Technical Report TR-2005-27, Aus-
trian Research Institut for Artificial Intelligence.
Talavera, L. and Roure, J. (1998). A buffering strategy
to avoid ordering effects in clustering. In ECML’98,
pages 316–321.
Uray, M., Skocaj, D., Roth, P. M., Bischof, H., and
Leonardis, A. (2007). Incremental LDA Learning
by Combining Reconstructive and Discriminative Ap-
proaches. In BMVC’07, University of Warwick, UK.
Wenzel, S. and F
¨
orstner, W. (2009). The role of sequences
for incremental learning. Technical Report TR-IGG-
P-2009-04, Department of Photogrammetry, Univer-
sity of Bonn.
THE ROLE OF SEQUENCES FOR INCREMENTAL LEARNING
439
