
INTEGRATING CASE BASED REASONING AND
EXPLANATION BASED LEARNING IN AN APPRENTICE
AGENT
Lei Wang, Tetsuo Sawaragi, Yajie Tian and Yukio Horiguchi
Graduate School of Engineering, Kyoto University, Yoshida Honmachi, Sakyo-ku, Kyoto, Japan
Keywords: Case based reasoning, Explanation based learning, Machine learning.
Abstract: The problem in applications of case based reasoning (CBR) is its utility problem, that is, the cost of
retrieving the most appropriate case from the case library for a new given problem and the cost of adapting
the retrieved case for solving the new given problem. This paper proposes an approach to solve the utility
problem of CBR by integrating CBR and explanation based learning (EBL) from a perspective that
emphasizes the function of learning in CBR. In this paper, CBR and EBL are integrated in an apprentice
agent, and the application of this apprentice agent in the robotic assembly domain is given as an example.
1 INTRODUCTION
Case-based reasoning (CBR) is a problem solving
paradigm that in many respects is fundamentally
different from other major AI approaches. Instead of
relying solely on general knowledge of a problem
domain, or making associations along generalized
relationships between problem descriptors and
conclusions, CBR is able to utilize the specific
knowledge of previously experienced, concrete
problem situations (cases). A new problem is solved
by finding a similar past case, and reusing it in the
new problem situation. A second important
difference is that CBR also is an approach to
incremental, sustained learning, since a new
experience is retained each time a problem has been
solved, making it immediately available for future
problems (Aamodt and Plaza, 1994). Generally, a
CBR cycle is described by the following four
processes: 1. Retrieve the most similar case or cases;
2. Reuse the information and knowledge in that case
to solve the problem; 3. Revise the proposed
solution; 4. Retain the parts of this experience likely
to be useful for future problem solving.
The problem in applications of CBR is its utility
problem, that is, the cost of retrieving the most
appropriate case from the case library for a new
given problem and the cost of adapting (i.e., reusing
and revising) the retrieved case for solving the new
given problem. Mantaras, et al. (Mantaras, et al.,
2006) regard the utility problem as a natural trade-
off between the benefits of speed-up knowledge and
the cost of its application. In their view, the utility
problem in CBR systems is caused by the conflict
between: 1. the average savings in adaption effort
due to the availability of a particular case, which
tends to increase efficiency as the case base grows,
and 2. the average retrieval time associated with a
given case base size, which tends to decrease
efficiency. Moreover, as new cases are added
retrieval costs become progressively greater but
adaption savings progressively less. Therefore, most
researchers on CBR focus on developing new
retrieval and adaption methods. There are also
researchers who have discovered the importance of
maintaining the case library to solve the utility
problem of CBR (Iglezakis, Reinartz and Roth-
Berghofer, 2004; Wilson and Leake, 2001).
However, in our opinion, learning (i.e., retaining)
is very important for CBR with regard to solving its
utility problem. This is because the retrieval and
adaption costs are not solely depend on the amount
of cases, but also rest with the representation forms
and contents of the cases. In CBR, learning decides
the representation forms of cases and the contents
that can be learned from cases. Therefore, our basic
idea is to save retrieval and adaption costs by
making more efforts on post-processing of cases.
The aim of emphasizing learning is to post–process
667
Wang L., Sawaragi T., Tian Y. and Horiguchi Y. (2010).
INTEGRATING CASE BASED REASONING AND EXPLANATION BASED LEARNING IN AN APPRENTICE AGENT.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Artificial Intelligence, pages 667-670
DOI: 10.5220/0002763306670670
Copyright
c
SciTePress
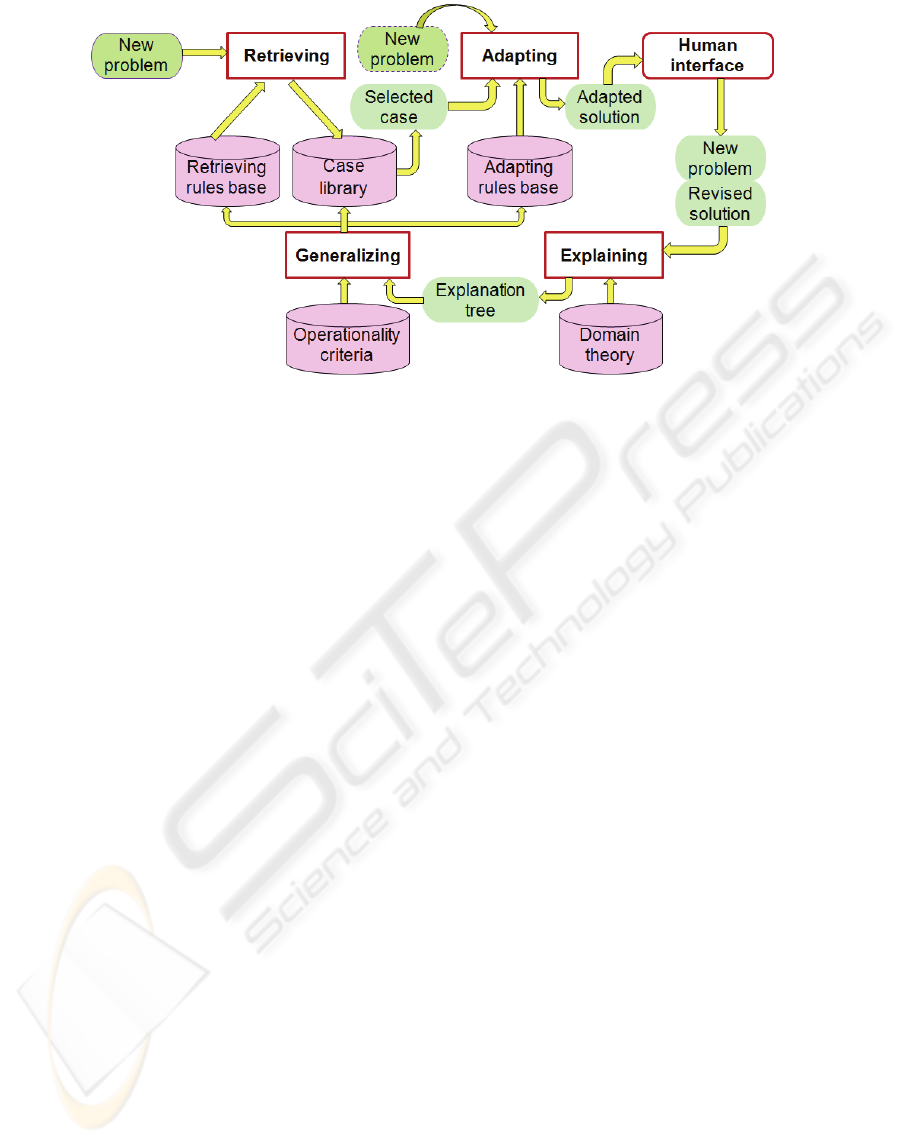
Figure 1: Structure of the apprentice agent.
cases to make them easier to be retrieved and to be
adapted for new problems. The method we use to
learn cases is explanation based learning (EBL).
EBL is a learning method that can acquire
knowledge through observing a single training
example with the help of a pre-encoded knowledge
base, which is called domain theory (Mitchell, Keller
and Kedar-Cabelli, 1986; DeJong and Mooney,
1986; DeJong, 2006). Given a domain theory, a
description of the goal concept, an operationality
criterion and a training example, the EBL method
tries to improve the domain theory in order to obtain
a more efficient (operational) definition of the goal
concept. EBL has two main steps: 1. to build an
explanation justifying why the input example is a
positive instance of the goal; and 2. generalizing the
explanation as much as possible while the
explanation holds. The explanation is the proof tree
build by the system during the problem solving
process. Therefore, the explanation is generated in a
deductive way and its generalization will be correct
since deductive methods are truth-preserving. Finally,
from the generalized explanation new rules can be
generated and stored as part of the domain theory
and they can be used for solving further problems.
The idea of EBL is much like that of CBR. Both
of them are to acquire knowledge from a single
problem-solving example and to reuse the acquired
knowledge to solve new problems. The difference
between the two is that EBL uses a domain theory to
explain why the example is a positive example of the
goal concept and generalizes the explanation to form
an operational knowledge that can be generally
reused for a type of new problems, while CBR
doesn’t analyze the example, but just directly saves
the example as a case into the case library. Therefore,
CBR and EBL can be integrated with each other.
Armengol, et al. (Armengol, Ontanon and Plaza,
2004; Armengol, 2007) have applied EBL in
retrieving appropriate cases in CBR.
In this paper, we integrate EBL into CBR to
make an apprentice agent that is applied in the
robotic assembly domain. The apprentice agent
works as a co-worker of human workers to assist
them in their task of teaching robots. The main
functions of the apprentice agent are: 1.
automatically generating robot programs for new
assembly tasks by reusing past learned experiences;
2. providing suggestions and hints for human
workers when human workers revise the robot
programs or teach robot new assembly skills; 3.
acquiring knowledge from revising and teaching
demonstrations of human workers. The most
distinctive feature of this apprentice agent is that it
uses CBR to help human workers in teaching robots
new assembly tasks by reusing past experiences and
applies EBL to learn assembly knowledge by
observing robot teaching demonstrations of human
workers. The EBL learning process can be regarded
as a post-processing process of cases before
retaining them in CBR. Its aim is to reduce the
retrieving and adapting cost of cases.
2 THE APPRENTICE AGENT
Figure 1 shows the structure of the apprentice agent.
There are five functional modules in the apprentice
agent: 1. Retrieving module, 2. Adapting module, 3.
Human interface module, 4. Explaining module, and
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
668

5. Generalizing module. Each of the modules has its
own knowledge base, except for the human interface
module. This is because human workers are the
knowledge source for the human interface module.
Through this module, the apprentice agent interacts
with human workers and acquires knowledge from
them.
2.1 Retrieving Module
After a new problem (i.e., an assembly task) has
been input into the apprentice agent, its retrieving
module uses a hierarchical mechanism to retrieve the
most appropriate case for the problem.
The hierarchical mechanism works in the
following two steps. First, it examines the features of
the problem, and matches these features against
heads of retrieving rules in the retrieving rules base.
If the features satisfy the head of a retrieving rule,
then this rule is selected and used to select a class of
past cases that corresponding to this rule from the
case library. In the robotic assembly domain, the
features examined in the first step of the retrieving
module are: 1. Type of the target workpiece, 2. Type
of the robot tool, 3. Type of assembly operation, and
4. Destination environment. Second, the retrieving
module uses a similarity distance calculation
algorithm to select the case that is most similar to the
new input problem from the class of cases confined
by the retrieving rule in the first step. The similarity
distance calculation algorithm works by assigning
different weights to the specific data in the problem
description such as the geometric data of the
workpiece and robot tool, assembly operation, and
destination environment information. It calculates
the similarity distances between the retrieved cases
in the first step and the input problem, and selects
the case with the shortest similarity distance to the
input problem.
Each case in the case library is corresponding to
a retrieving rule. This rule is generalized by EBL in
the learning process of CBR. Its role is to classify
cases in the case library according to their features.
In this way, the retrieving cost can be reduced by
classifying the cases with retrieving rules.
2.2 Adapting Module
Both the selected case and the new input problem
description are input to the adapting module. The
adapting module compares the data in the new
problem description against those in the problem
description of the selected case to determine whether
to revise the solution plan in the selected case or to
reuse it directly.
In our apprentice agent, a case in the case library
is composed of three parts: 1. Primitive problem
description of the case, 2. Generalized solution plan,
3. Explanation of the generalized solution plan. In
the robotic assembly domain, a primitive problem
description is a description of an assembly task. A
generalized solution plan is a generalized robot
program for the assembly task. A generalized robot
program consists of a robot command schema and
point parameter deciding methods for points in the
robot schema. Explanation of the generalized
program provides instructions of the robot schema
and point parameter deciding methods to make them
be easily understood by human workers.
The adapting module decides whether to revise
the selected case by searching available adapting
rules with considering differences between the new
problem description and the problem description of
the selected case. If adapting rules are searched, it
will revise the case according to these rules.
Otherwise, it won’t revise the case but just reuses it
directly.
Here, reusing means the adapting module uses
the robot program schema and determines point
parameters with point parameter deciding methods
and data in the new problem description to generate
a robot program for the new problem. Revising
means the adapting module revises the robot
commands or point parameter deciding methods in
the generated program according to adapting rules.
The adapting rules are not pre-encoded, but are
learned by the EBL process of the apprentice agent.
Thus, an adapted case without revision doesn’t mean
it doesn’t need revision, but means there has not
been available adapting rules learned for revising it.
2.3 Human Interface Module
The human interface module shows the adapted
solution to human workers. Human workers review
it and test it in the playback mode of robots. If
human workers are not satisfied with its performance
or error occurs, they will further revise the adapted
solution. Then the human interface module sends the
new problem description, the revised solution,
together with the adapted solution to the EBL
process (i.e., explaining and generalizing modules)
of the apprentice agent to acquire assembly
knowledge of human workers from them.
INTEGRATING CASE BASED REASONING AND EXPLANATION BASED LEARNING IN AN APPRENTICE
AGENT
669

2.4 Explaining and Generalizing
Modules
Explaining and generalizing modules constitute the
EBL process of the apprentice agent. Our past work
(Wang, L., Tian, Y. and Sawaragi, T., 2008) has
described its detailed working mechanism.
The EBL process both can learn from examples
directly given by human workers and can learn from
examples generated by the adapting module and
further revised by human workers. The learning
results include: 1. a retrieving rule for the case, 2. the
case, and 3. adapting rules of the case. The adapting
rules are learned by comparing the revised solution
with the adapted solution.
3 AN EXAMPLE
Figure 2 shows an application example of the
apprentice agent. In this example, the apprentice
agent assists human workers by generating robot
programs for palletizing two rows of blocks into a
plate. The blocks in the same row have the same
cross-section but different heights. The blocks in the
left row have bigger widths (i.e., are thicker) than
those in the right row.
Figure 2: An example: palletizing blocks.
First, human workers teach the robot how to
palletize the blue block in the right row. Then the
apprentice agent reuses this case successfully in
palletizing the rest blocks in the left row.
However, when the case is reused in palletizing
the first (i.e., the blue) block in the left row, an error
occurs. The robot tool collides with the target blue
block. Then human workers revise the adapted
solution by inserting a command to slow down the
robot speed before the command of closing the robot
tool. The revised solution can be executed without
errors. The EBL process learns a new case from the
revised solution and an adapting rule that if the
width of the workpiece is not much smaller than (i.e.,
>80% of) the open width of the robot tool, then robot
should slow down before gripping the workpiece.
The apprentice agent reuses the new learned case in
palletizing the rest blocks of the left row successfully.
4 CONCLUSIONS
We propose a method that integrates CBR and EBL
in an apprentice agent to solve the utility problem of
CBR. Its distinctive feature is applying EBL in post-
processing an observed case to reduce its reusing and
adapting cost. While this apprentice agent can be
used for general purposes, in this paper we apply it
in the robotic assembly domain.
REFERENCES
Aamodt, A. and Plaza, E., 1994. Case-based reasoning:
foundational issues, methodological variations, and
system approaches. AI Communications, Vol. 7: 1, pp.
39-59.
Armengol, E., Ontanon, S. and Plaza, E., 2004. Explaining
similarity in CBR. ECCBR 2004 Workshop
Proceedings.
Armengol, E., 2007. Usages of generalization in case-
based reasoning. Lecture Notes In Artificial
Intelligence, Vol. 4626. Proceedings of the 7th
international conference on Case-Based Reasoning:
Case-Based Reasoning Research and Development.
DeJong, G. and Mooney, R., 1986. Explanation-based
learning: an alternative view. Machine Learning, Vol.1,
pp.145-176.
DeJong, G., 2006. Toward robust real-world inference: a
new perspective on explanation-based learning. ECML
2006.
Iglezakis, I., Reinartz, T. and Roth-Berghofer, T., 2004.
Maintenance memories: beyond concepts and
techniques for case base maintenance. In Proceedings
of the Seventh European Conference on Case-Based
Reasoning. Berlin: Springer, pp. 227–241.
Mantaras, R., et al., 2006. Retrieval, reuse, revision and
retention in case-based reasoning. The Knowledge
Engineering Review, Vol.20:3, pp. 215-240.
Mitchell, T., Keller, R. and Kedar-Cabelli, S., 1986.
Explanation-based generalization: a unifying view.
Machine Learning, Vol.1, pp.47-80.
Wang, L., Tian, Y. and Sawaragi, T., 2008. Explanation-
based manipulator learning: acquisition of assembling
technique through observation. Proceedings of the
17th World Congress of IFAC, pp.2412-2417.
Wilson, D. and Leake, D., 2001. Maintaining cased-based
reasoners: dimensions and directions. Computational
Intelligence, Vol.17:2, pp.196–213.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
670
