
COGNITIVE
PERSPECTIVES ON ROBOT BEHAVIOR
∗
Erik A. Billing
Department of Computing Science, Umeå University, Umeå, Sweden
Keywords:
Behavior based control, Cognitive artificial intelligence, Distributed cognition, Ontology, Reactive robotics,
Sensory-motor coordination, Situated action.
Abstract:
A growing body of research within the field of intelligent robotics argues for a view of intelligence drastically
different from classical artificial intelligence and cognitive science. The holistic and embodied ideas expressed
by this research promote the view that intelligence is an emergent phenomenon. Similar perspectives, where
numerous interactions within the system lead to emergent properties and cognitive abilities beyond that of the
individual parts, can be found within many scientific fields. With the goal of understanding how behavior
may be represented in robots, the present review tries to grasp what this notion of emergence really means
and compare it with a selection of theories developed for analysis of human cognition, including the extended
mind, distributed cognition and situated action. These theories reveal a view of intelligence where common
notions of objects, goals, language and reasoning have to be rethought. A view where behavior, as well as
the agent as such, is defined by the observer rather than given by their nature. Structures in the environment
emerge by interaction rather than recognized. In such a view, the fundamental question is how emergent
systems appear and develop, and how they may be controlled.
1 INTRODUCTION
During the last decades, intelligent robotics has drawn
towards a pragmatic view where no single design phi-
losophy is clearly dominating. On the one hand, low
level interaction with the world is often implemented
with a reactive design philosophy inspired by Rodney
Brooks’ work, (Brooks, 1986; Brooks, 1990; Brooks,
1991a; Brooks, 1991b). On the other hand, classi-
cal AI-elements such as cartographers and planners
are common modules for the high level control. Si-
multaneously, increasing system size and complexity
raises requirements on well structured and modular
system designs. Colored by an object-oriented pro-
gramming approach, the system behavior is imple-
mented through composition of modules. This kind of
systems is commonly referred to as hybrid architec-
tures. (Gowdy, 2000; Murphy, 2000; Doherty et al.,
2004)
In a wider perspective hybrid systems propose a
∗
P
arts of this text also appear as a technical report:
Billing, E. A. (2007). Representing Behavior - Distributed
theories in a context of robotics, UMINF 07.25, Department
of Computing Science, Umeå University, Sweden.
view of intelligence where simple behavior, like walk-
ing or grasping objects are typically reactive, while
more complex tasks, like choosing a path or select-
ing objects are products of reasoning upon internal
representation. “The robot can think in terms of a
closed world, while it acts in an open world”, (Mur-
phy, 2000).
This view is not totally distant from the one pro-
posed by modern cognitive science. The information
processing model is still dominant for describing high
level cognition (Stillings et al., 1995), while more
reactive models have become popular for describing
lower levels of control, especially within cognitive
neuroscience (Shea and Wulf, 1995; Kaiser and Dill-
mann, 1996).
Even though hybrid architectures are today clearly
dominating the field of intelligent robotics, there are
several alternatives. A fundamentally different stand-
point is taken by researchers proposing an embod-
ied and holistic approach, (Matari
`
c, 1997; Pfeifer and
Scheier, 1997; Pfeifer and Scheier, 2001; Nicolescu,
2003). As these theories enforce concepts of dis-
tributed and emergent behavior, the present work is
an attempt to analyze these notions of emergence ac-
tually mean. Similar ideas can be found within a vari-
373
A. Billing E. (2010).
COGNITIVE PERSPECTIVES ON ROBOT BEHAVIOR.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence, pages 373-382
DOI: 10.5220/0002782103730382
Copyright
c
SciTePress

ety of fields, including the extended mind (Clark and
Chalmers, 1998), distributed cognition (Hutchins,
1995) and situated action (Suchman, 1987). All these
theories are, in a general sense, studies of behavior
beyond that of the individual, in groups or in inter-
action with artifacts. As such, these theories provide
new perspectives on what it is we are in fact trying to
achieve when building intelligent robots, and how we
should get there.
1.1 Differences Between the Reactive
and Deliberative Views
The reactive view grew during the 1980 as a re-
action against classical artificial intelligence and
cognitive science, and was in many ways a step
back towards behavioristic ideas, (Braitenberg, 1986;
Brooks, 1986; Georgeff and Lansky, 1987; Maes,
1991). The early reactive trend argued strongly
against representations, but due to the obvious limi-
tations of such an attitude, later work within the reac-
tive field incorporate representations, but of a differ-
ent type than the ones typically found within deliber-
ating systems.
Deliberative architectures implement a domain
ontology, that is, a definition of what things that exist
in the world, but without a precise description of their
properties and interrelations, (Russell and Norvig,
1995). This corresponds to a reductionist perspective
also found within cognitive science and classical arti-
ficial intelligence.
Reactive systems are instead defined by a low-
level specification that corresponds to the inputs and
outputs of the system, referred to as the sensory-
motor space (Pfeifer and Scheier, 1997). I here
refer to a quite large variety of approaches, in-
cluding the subsumption architecture (Brooks, 1986;
Brooks, 1991b), behavior based systems (Matari
`
c,
1997; Arkin, 1998; Nicolescu, 2003) and sensory-
motor coordination (Pfeifer and Scheier, 2001; II and
Campbell, 2003; Bovet and Pfeifer, 2005). Without
claiming that all these approaches are one and the
same, I use the term reactive as a common notion for
these approaches proposing an embodied and holistic
view.
The low-level specification defines the sensory-
motor space as an entity which is related to the ex-
ternal world via a physical sensor or actuator on the
robot. For a simple robot with eight proximity sen-
sors and two independently controlled wheels, the
sensory-motor space is ten-dimensional where each
dimension corresponds to one sensor or motor. Many
sensors provide multi-dimensional data. For example,
a camera with a resolution of 100x100 pixels would
increase the sensory-motor space with 10 000 new
dimensions, where each pixel in the camera image
corresponds to one dimension in the sensory-motor
space. Cameras and other complex sensors could also
be viewed as providing a single, complex, dimen-
sion in the sensory-motor space, but the amount of
pre-processing or interpretation of data is always very
limited in a low-level specification implement.
Pfeifer and Scheier (Pfeifer and Scheier, 1997)
point out that a system using a low-level specifica-
tion has a much larger input space than deliberative
systems specified by a domain ontology, which also
allows much greater complexity. Another interesting
difference lies in information content. On the one
hand, each dimension in the input space of a delib-
erative system is fairly informative. It could be the
horizontal position of the robot on a map or the height
of an object in front of the robot. On the other hand,
most dimensions in the sensory-motor space are es-
sentially meaningless if not viewed in the context of
other dimensions. A single pixel in an image says
very little about the content of the scene when that
pixel is viewed alone, but in the context of the other
pixels, it may be very informative. One could easily
argue that such a large and complex sensory-motor
space is the result of an ill chosen representation.
With no doubt it is much easier to create readable
representations using a deliberative approach, where
sensor data have been processed so that it much better
reflects our own understanding of what is going on.
Even though this criticism is correct and impor-
tant, the sensory-motor space should not be under-
stood as an unprocessed version of objects and other
aspects in the world, but the representation of some-
thing else. The original argument against represen-
tations found in early reactive research has the last
decade been replaced with a more accepting attitude
towards representations, but representations of behav-
ior rather than representations of the world. Accord-
ing to Pfeifer and Scheier, many things can be solved
in a much simpler and more robust way without the
use of high-level percepts. In general, the sensory-
motor space appears to be a more suitable frame for
representations than the kind of world models found
in classical AI. (Pfeifer and Scheier, 1997; Pfeifer and
Scheier, 2001; Dawson, 2002)
Low-level specifications have the great advantage
that each dimension in the sensory-motor space is di-
rectly mapped to the corresponding sensors or motors,
while the inputs to a deliberative system, such as posi-
tion and size of objects, are often very hard to acquire.
By assuming the necessity of high-level percepts we
impose our own frame of reference upon the agent.
Our notions of objects and states in the world are for
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
374

sure handy when reflecting upon an agent’s behav-
ior, but may not be necessary, or even desirable, when
performing the same acts.
The principle of the frame of reference may be il-
lustrated through the parable with the ant, presented
by Herbert A. Simon, (Simon, 1969). Imagine an ant
making its way over the beach, and that the way it
chose was traced. When observing all the twists and
turns the ant made, one may be tempted to infer a
fairly complex internal navigation process. However,
the complexity of the path may not be the result of
the complexity of the ant, but the result of interac-
tion between a relatively simple control system, and a
complex environment.
Long before Brooks presented his ideas on reac-
tive robotics (Brooks, 1986; Brooks, 1990; Brooks,
1991b), it was shown that complex behavior could
emerge from simple systems, for example through the
Homeostat (Ashby, 1960) and Machina speculatrix
(Walter, 1963). Furthermore, Braitenberg’s Vehicles
(Braitenberg, 1986) was one of the most important in-
spiration sources for Brooks’s work.
This discussion constitutes a central part of the
criticism against deliberative systems and the motiva-
tion for a reactive approach. However, since reactive
systems do not define any ontology with meaning-
ful inputs, many types of, typically sequential tasks,
are very hard to represent in this manner. Even
though several examples of reactive systems show-
ing deliberative-like behaviors exist, for example Toto
(Matari
`
c, 1992) and the reactive categorization robot
by Pfeifer and Scheier (Pfeifer and Scheier, 1997),
both the systems and the task they solve are typically
handcrafted, making them appear more as cute exam-
ples of clever design than solutions to a real problem.
The difference between reactive and deliberative
systems has been described as the amount of compu-
tation performed at run-time, (Matari
`
c, 1997). A reac-
tive control system can be derived from a planner, by
computing all possible plans off-line beforehand, and
in this way create a universal plan (Schoppers, 1987).
This argument about on-line computation beauti-
fully points out how similar the two approaches of re-
active and deliberative control may be. Still, when
proposing the reactive approach, Rodney Brooks
pointed out a number of behavioral differences to
classical deliberative systems: “robots should be sim-
ple in nature but flexible in behavior, capable of act-
ing autonomously over long periods of time in uncer-
tain, noisy, realistic, and changing worlds”, (Brooks,
1986). So if a reactive controller is merely a pre-
computed plan, why these differences in behavior?
One critical issue is speed. Brooks often points
out the importance of real-time response and that the
cheap design of reactive systems allows much faster
connections between sensors and actuators than the
deliberative planners, (Brooks, 1990). Even though
this was an important point in the early nineties, the
last years’ increase in computational power allows
continuous re-planning within a reactive time frame,
(Dawson, 2002).
Another reason may be that reactive controllers
are typically not derived from planners. Rather, reac-
tive controllers are handcrafted solutions specialized
for a certain type of robot. Achieving a specific com-
plex behavior in a reactive manner can be a challenge,
which may be one important reason for the limited
success of reactive systems in solving more complex,
sequential tasks (Nicolescu, 2003). Taking Matari
´
c’s
point about run-time computation into account, the re-
active approach still does not propose a clear way to
achieve a desired controller; it only shows that the de-
liberative part can be removed when intelligence has
been compiled into reactive decision rules.
Hybrid systems do obstacle avoidance using reac-
tive controllers not because re-planning is computa-
tionally heavy, but because re-planning is difficult to
implement. Even though one could imagine a plan-
ner generating exactly the same behavior as one of
Braitenberg’s vehicles avoiding obstacles, the struc-
ture of such a planner would probably be much more
complicated than the corresponding controller formu-
lated in reactive terms. This may in fact, at least
from an engineer’s point of view, be the most suit-
able distinction between the reactive and deliberative
perspectives. It appears that behaviors like obstacle
avoidance and corridor following is easily formulated
in reactive terms, while selecting a suitable path from
a known map is better formulated using a planner.
Other things, actually most things, are too hard to
manually design using any of these two approaches.
1.2 Emergence of Behavior
As mentioned in the previous section, supporters of
the reactive approach freely admit that the implemen-
tation of high-level deliberative-like skills in reactive
systems is very difficult, (Pfeifer and Scheier, 2001;
Nicolescu, 2003). The route to success is often said
to be emergence, (Maes, 1990; Matari
`
c, 1997; Pfeifer
and Scheier, 1997). But what exactly does this mean?
The term emergent is commonly described as
something that is more than the sum of its parts, but
apart from that it is in fact hard to arrive at a defini-
tion suitable for all uses of the term, (Corning, 2002).
Within the field of intelligent robotics, emergence is
used to point out that a robot’s behavior is not explic-
itly defined in the controller, but something that ap-
COGNITIVE PERSPECTIVES ON ROBOT BEHAVIOR
375

pears in the interaction between the robot and its en-
vironment. Pfeifer and Scheier (Pfeifer and Scheier,
2001) proposes a number of design principles for au-
tonomous robots. The critical points are shortly sum-
marized below.
1. Behavior should emerge out of a large number of
parallel, loosely coupled processes.
2. Intelligence is to be conceived as sensory-motor
coordination, i.e., the sensory-motor space serves
as a structure for all representations, including the
categorization and memory.
3. The system should employ a cheap design and ex-
ploit the physics of its ecological niche.
4. The system must be redundant.
5. The system should employ the principles of self-
organization.
Not surprisingly, those principles are well aligned
with those found in literature discussing emergence,
(Corning, 2002; Flake, 1998). Consequently, mod-
ern reactive architectures should constitute a good
approach for design of systems showing emergent
properties, but this is yet far from a unified theory
on which robotics architectures could be built, (Hey-
lighen et al., 2004). Before a theory of emergent be-
havior could actually be used, much more has to be
understood about the theoretical properties of emer-
gence, but such an analysis is seldom found in robotic
literature.
1.3 Criticism Against the Hybrid View
After looking a bit closer at the principles of the reac-
tive and deliberative approaches, the philosophy be-
hind hybrid approaches seems to be much closer to
the latter. Hybrid systems clearly align to a reduction-
ist view, enforcing the importance of system modular-
ity and hierarchical structures. The promoters of hy-
brid systems motivate this design effort in completely
different ways than the supporters of reactive systems
argue for a holistic perspective. Obviously, from an
engineering perspective, it is very important to be able
to build larger systems in some kind of modules, so
that each part can be tested and refined separately.
While this strongly contradicts the holistic perspec-
tive, reactive supporters have no solution to, and are
generally not interested in, these issues.
So what exactly are the problems with combining
the reactive in the small, and deliberative in the large?
Since the hybrid approach is so wide and generally
friendly towards anything that works, it is hard to ac-
tually say something about these systems which truly
applies to all of them. Still, some common criticism
has been raised against the hierarchical approach, es-
pecially from the field of embodied cognitive science.
The core issues are summarized bellow.
• Even though hybrid systems adopt an embod-
ied view for interaction with the world, they still de-
fine a domain ontology and are consequently bound
by the limitations of this approach. One critical point
of the reactive approach is that no concepts or sym-
bols should be pre-defined. This point is lost when
hybrid systems use reactivity as an interface to the
world rather than the source of intelligence. (Pfeifer
and Scheier, 2001)
• The kind of information produced by the reac-
tive layer in a hierarchical system is often fundamen-
tally different from that required by the deliberative
subsystems, making it hard to design suitable interac-
tion between the two layers. For this reason, the sens-
ing part in the deliberative layer is often designed in a
non-reactive way, reintroducing the problem of how
objects, and concepts in general, should be recog-
nized in complex and noisy data. (Pfeifer and Scheier,
2001; Dawson, 2002)
• While a critical aspect of modularity is to be able
to test and control the function of each module before
inserting it in the complete system, one important goal
of reactive approaches is to achieve emergent proper-
ties which by definition do not appear in the modules
alone. Even though hybrid systems successfully em-
ploy simpler reactive behavior, they do not leave room
for emergent properties. (Pfeifer and Scheier, 2001;
Brugali and Salvaneschi, 2006)
2 AN EXTENDED PERSPECTIVE
The fundamental differences between modern ap-
proaches within intelligent robotics have now been
outlined. The rest of this paper present a number of
different views on cognition, and apply them in a con-
text of intelligent robotics. These views will make
deliberative and reactive perspectives appear less like
the two extremes, and more like one dimension within
the multi-dimensional study of cognition and behav-
ior.
Cognitive science has received significant
amounts of criticism for its undivided focus on the
individual, where a proper analysis of the social
aspects of interaction is missing, (Greeno, 1993;
Heylighen et al., 2004; Hutchins, 1995; Suchman,
1987). Similar criticism has been raised towards
classical AI and deliberative robotics, but to some
extent it also applies to reactive systems. Both
deliberative and reactive approaches share a view of
the single agent as one conceived unit, interacting
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
376

with the outside world through input and output
interfaces. Even though this might seam like a safe
assumption for many systems like humans, animals,
computers and robots, I will in this chapter present
a couple of theories where the object of analysis is
changed to incorporate fundamentally different types
of cognitive systems. As will be illustrated, many
aspects of these systems are strikingly similar to the
architectures proposed within robotics.
2.1 The Extended Mind
Clark and Chalmers (Clark and Chalmers, 1998) de-
scribe two people, Inga and Otto, who are both going
to visit the Museum of Modern Art which lies in the
53rd street. Inga heard from a friend that there is an
exhibition at the Museum of Modern Art and she de-
cides to go there. She looks up the address and re-
members it. She forms the belief that the Museum
of Modern Art is on 53rd street. But now consider
Otto who has Alzheimer’s disease and instead of re-
membering the address writes it down in his note-
book. Clark and Chalmers argue that Inga and Otto
in principle have the same belief, even though parts
of Otto’s belief in a very strong sense are outside his
body. This is an example of the extended mind.
Interestingly, Otto’s behavior may easily be de-
scribed in reactive terms. Otto changes the environ-
ment, his notebook, in a manner which later will lead
him to the correct address. In contrast, Inga’s behav-
ior is a classical example which can’t be described
within a purely reactive architecture. Still, Clark and
Chalmers point out that Otto’s and Inga’s cognitive
processes are essentially the same. I would argue that
the reason why we usually view Inga’s and Otto’s
cognitive processes as quite different is our usual con-
cept of an individual. If we chose to view the per-
son as an entity enclosed by the skin, the use of a
notebook as memory is very different from the use
of nerve structures for the same purpose. But, if
we instead follow Clark and Chalmers’ argument and
widen our notion of a person to include the notebook,
the two types of memory appear very similar.
This point could also be illustrated by a computer.
What exactly is a computer? Most people would
probably say that it’s the screen, the key-board and
mouse, and of course the box on the floor which you
connect all the cables to. If one uses a Memory Stick
to store things on, that is not a part of the computer,
but a different object. Still, technically speaking, the
Memory Stick, when connected, is very similar to the
hard drive within the computer. The Memory Stick
might, just as Otto’s notebook, have lower storage ca-
pacity, a bit slower access speed, and not always be
available. Still, it fills the same function as the in-
ternal memory. Admittedly, our common notion of a
person, where the notebook is not included, is very
convenient, but we should be aware that it is merely a
convention.
This discussion opens up the notion of an agent.
We choose to see one agent as separated from its en-
vironment not because it is different from the environ-
ment, but because it, from our perspective, is conve-
nient to view it like that. This does not imply that the
notion of agents and objects is totally arbitrary, but
neither is it totally predefined.
I mentioned earlier Pfeifer and Scheier’s notion of
frame of reference, pointing out that an agent’s behav-
ior is always seen from an observer’s perspective. The
view presented here takes one step further by saying
that even the notion of agent is dependent of the ob-
server. This distinction is important since Pfeifer and
Scheier strongly argue towards representations within
a sensory-motor space. If the agent is an entity cre-
ated by the observer, so are sensors and motors, and
with these, the sensory-motor space.
Following this discussion, the notion of an agent
should be able to divide into smaller, sub-agents, with
different sensors and motors. The functions of these
sub-agents may differ drastically from the function of
the combined agent, just like Otto and his notebook
can do more things together, than neither of them can
do separately. Consequently, the question of how be-
havior is represented is transformed into how Otto
figures out that he should use a notebook? Or more
generally: How does purposeful emergent behavior
among agents appear?
2.2 A Universe of Possibilities
One of the inspiration sources to Clark and Chalmers’
work came from distributed cognition, (Hutchins,
1995). Hutchins points out the importance of viewing
cognitive processes as something that goes on both in
the environment and within the individual, but in con-
trast to Clark and Chalmers, Hutchins’ focus lies on
group level dynamics. In this context, the agent, or
the cognitive system, is expanded not only to incor-
porate one person and his tools, but many people and
artifacts in cooperation.
Hutchins takes a few steps further than Clark and
Chalmers by not only proposing an extended view, but
also using it to analyze systems. Distributed cogni-
tion has been applied to many systems, including ship
navigation (Hutchins, 1995), human-computer inter-
action (Hollan et al., 2000), various aspects of air-
plane control (Hutchins and Klausen, 1996; Hutchins
and Holder, 2000; Hutchins et al., 2002) and more re-
COGNITIVE PERSPECTIVES ON ROBOT BEHAVIOR
377
cently clinical systems (Galliers et al., 2006). While
distributed cognition as used in these examples have
no apparent application to robotics, the result of this
research might still shed some light on what we want
to achieve when designing for purposeful emergent
behavior.
From a deliberative perspective, a large and diffi-
cult problem is to recognize objects and their proper-
ties in complex and noisy data. From a reactive view,
the same problem is instead described as how to arrive
with suitable emergent properties. And finally, form
the perspective of distributed cognition, this problem
is strongly related to the formation of interpretations
within a group. Hutchins investigates the properties
of interpretation formation on group level using con-
straint satisfaction networks, (Hutchins, 1995). The
weights of the networks were arranged so that each
network could arrive at only two stable states, or in-
terpretations. One interpretation corresponds to the
activation pattern 111000 while the other interpreta-
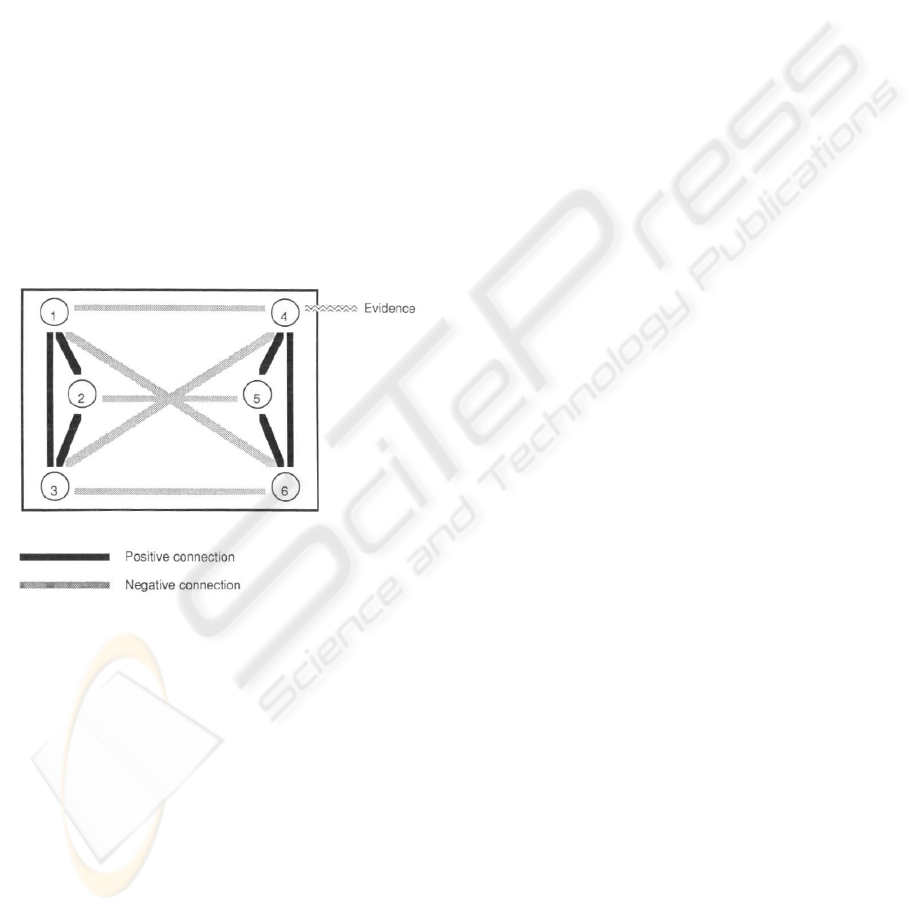
tion corresponds to 000111, see Figure 1.
Figure 1: Constraint satisfaction network, (Hutchins, 1995,
p. 244). Black and gray lines represent positive and nega-
tive connections, respectively. Strong activation in left side
nodes will consequently inhibit activation in nodes to the
right, and the other way, driving the network towards one of
two stable states. Republished with permission.
The initial activation of the nodes is here viewed
as confirmation bias. When the network is executed
alone, it will always arrive with the interpretation
closest to its initial state. However, when the net-
works are connected so that the activity of some nodes
propagates to other nodes of a different network, their
decision properties change due to interaction between
the networks. As Hutchins puts it, this illustrates how
interpretation of information changes due to the orga-
nization of the group. In a robotics context, this might
be applied as having several reactive controllers cre-
ating a virtual “environment” for each other. More
specifically, controllers do not only take input from
sensors and send commands to actuators, but might
also sense and act upon other controllers, drastically
increasing the complexity of the system as a whole.
The organization of such a system should be similar
to the organizational properties of a group.
Hutchins shows that having this kind of organi-
zation, where multiple connected agents try to make
their individual interpretations, produces a system
that efficiently explores interpretation space. Further-
more, even after reaching a common interpretation,
such a system is much more likely to re-evaluate the
interpretation in case of new evidence. However, in
case of too much interaction within the group, inter-
pretation space is not explored properly. In contrast,
too little interaction will result in that no single inter-
pretation is achieved. Hutchins calls this the funda-
mental tradeoff in cognitive ecology.
This discussion is not only interesting as analysis
of group behavior, but also as a way to understand in-
terpretations within the individual. Here, the process
of transforming sensor data into symbols with mean-
ing is replaced with a continuous constraint satisfac-
tion between sensors, actuators and internal states.
In this view, we do not perceive what is in the en-
vironment; instead we are striving towards the clos-
est stable state, pushed in one direction or another by
changes in the environment.
There are mainly two advantages with this model
of cognition, compared to the classical view of in-
formation processing. First, the interpretation always
arrives from the current state of the system. Conse-
quently, each interpretation is based on much more
information than when sensor data is seen as a se-
ries of discrete readings which should be understood
more or less separately. Secondly, when the notion of
symbols is replaced with that of attractors, the number
and meaning of these entities can be changed dynam-
ically. This opens up the possibility for a solution to
one key problem of deliberative processing; the cre-
ation of new symbols.
This view of cognition as the propagation of repre-
sentational states across representational media might
provide a new and powerful tool for understanding
interpretation and decision making also in robots.
However, even though Hutchins provides an extensive
analysis of several existing distributed systems, a gen-
eral understanding of how such a system appears and
develops is still missing, (Heylighen et al., 2004).
2.3 Situated Action
When studying interactions between people, the anal-
ysis of language becomes one critical sub field. Clas-
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
378

sical cognitive science literature describes language
as “a system that uses some physical signal (a sound, a
gesture, a mark on paper) to express meaning”, (Still-
ings et al., 1995). In other words, language is viewed
as a communication channel where some meaning,
i.e. an internal representation, is encoded into a phys-
ical signal using some grammar and then decoded
by the listener into a similar internal representation.
However intuitive this view may appear, it is not the
only one. A fundamentally different perspective was
presented in late eighties by Lucy A. Suchman under
the name situated action, (Suchman, 1987).
Suchman’s claim is that the traditional view of lan-
guage includes several fundamental problems. One
of the most important issues is the discussion around
shared knowledge. If the cognitive view of language
is correct, a speaker must not only encode the repre-
sentation into words, but also take into account what
the listener already knows. As Suchman puts it, this
is equivalent with having a body of shared knowledge
that we assume all individuals within our society to
have. When speaking, only the specifics of the inter-
nal representation are transformed into words, leaving
out everything covered by the shared knowledge.
To exemplify the problem, Suchman uses the re-
sult from an exercise assigned by Harold Garfinkel,
(Suchman, 1987). Students were asked to write down
a description of a simple conversation. On the left
hand side of the paper the students should write what
was said, and on the right hand side what they un-
derstood from the conversation. While the first part
of the assignment was of course easy, the second part
seemed to grow without limit. Many students asked
how much they were supposed to write, and when
Garfinkel imposed accuracy, clarity and distinctness
the students finally gave up with the complaint that
the task was impossible. The point here is not that the
body of shared knowledge is too large to write down
on a paper, but that the task resulted in a continually
growing horizon of understandings to be accounted
for.
The assignment, it turned out, was not to describe
some existing content, but to generate it. As such, it
is an endless task. The students’ failure suggests not
that they gave up too soon, but that what they were as-
signed to do was not what the participants in the con-
versation themselves did in order to achieve shared
understanding. (Suchman, 1987).
Even though there might be several other ways to ex-
plain the result from Garfinkel’s assignment, Such-
man’s point is striking. If knowledge is not pre-
existing to language as much as it is generated by it,
it puts our understanding of internal representations
in a fundamentally different light. The meaning of a
spoken phrase does not appear to exist in any stronger
sense than obstacles exists for one of Braitenberg’s
vehicles.
Situated action is not at all limited to analysis of
language. In fact, situated action tries to unify all
kinds of behavior where language is seen as a very
specialized sub field. In such a view, spoken words
has the same relation to semantics as an agent’s ac-
tions has to intentions. However, it should be remem-
bered that Suchman’s work is presented as a theory
of human-computer interaction rather than a theory
of behavior or intelligence.
If language and other complex behavior do not be-
gin with an internal representation or intent, how is it
produced? The view proposed by Suchman begins
in the context of the agent: “every course of action
depends in essential ways upon its material and so-
cial circumstances,” (Suchman, 1987). The circum-
stances or situation of actions can, at least in a con-
text of intelligibility, be defined as “the full range of
resources that the actor has available to convey the
significance of his or her own actions, and to interpret
the actions of others,” (Suchman, 1987). This could
be interpreted as if the world is understood in terms
of actions. The fact that we know how to walk makes
us really good at recognizing such behavior. In the
domain of human-computer interaction, the same ar-
gument implies that our understanding of a computer
is represented in terms of what we can do with it, not
as a structural model of the computer as such. As a
consequence, a selection of the best path towards a
desired goal is not dependent on a representation of
roads, but on the availability of the actions for turning
left or right.
Furthermore, the goal of situated action is not rep-
resented in any other way than as preferences to some
actions given a specific situation. Our common under-
standing of plans and goals is in this context nothing
but a way to reflect on past events. As Suchman points
out, a declaration of intent generally says very little
about the precise actions to follow, it is the obscurity
of plans that makes them so useful for everyday com-
munication (Suchman, 1987).
This discussion puts not only notions of inten-
tions and plans in a secondary position, but conscious
thoughts in general appear to be less the driving force
behind action than an artifact of our reasoning about
action. Seen in the robotics context, deliberative pro-
cesses should in a very strict sense be emerging from
lower levels of interaction, not something predefined
that supervises the lower levels.
One interesting implication of these theories is
that observed sensor data bears a very loose connec-
tion to its semantic content. The interpretation is cre-
COGNITIVE PERSPECTIVES ON ROBOT BEHAVIOR
379

ated by the observer in interaction with the data rather
than extracted from the observed data. The creation
of an interpretation is in this view more about gener-
ating information, than processing it.
3 DEVELOPMENT AND DESIGN
The theories presented above depict a perspective of
intelligence where cognitive ability emerges out of in-
teractions between multiple parts of an agent. The
agent is very loosely defined as a cognitive system,
i.e., a large number of physically and/or socially dis-
tributed entities which interact and in this way achieve
something more than any of them could do alone.
More explicitly, intelligent behavior of a cognitive
system is produced from entities which are totally un-
aware of the dynamics of that system as a whole.
In such a view, elements in the world are never
explicitly represented, but appear in terms of possi-
bilities for situated actions. Information does not flow
from inputs to outputs, but back and forth through nu-
merous representational states, coordinating sensors
and actuators rather than controlling them. The mean-
ing of actions, symbols or data in general is achieved
through interaction among elements, not given by a
grammar. Conscious processes are not the fundamen-
tal foundation for intelligent behavior, but its funda-
mental phenomenon. The question still remaining is:
How does one create a system based on the principles
presented above?
3.1 Evolution of Self-organization
Emergent properties which in the previous discussion
so gracefully are said to explain intelligence do, from
an engineering perspective, often cause more prob-
lems than they solve. What is seldom mentioned is
that guidelines like those presented by Pfeifer and
Scheier, (Pfeifer and Scheier, 2001) only address
half the question of emergent behavior. We are nor-
mally not interested in just any emergent behavior, but
specifically in those emergent effects which fulfill the
task for which the robot is designed. This may prove
to be much more difficult to achieve than just emer-
gence in general.
There are a number of theories approaching this
problem. The most frequently mentioned within
robotics is self organization. The principle of self or-
ganization means that the system spontaneously de-
velops functional structure through numerous interac-
tions between its parts. The basic mechanism behind
this structure is mutual benefit, symbiosis. Parts in
the system will continue to rearrange until both find a
relative state which is satisfactory. A frequently used
interaction pathway will grow stronger while rarely
used pathways will weaken or disappear. The mech-
anisms controlling what is satisfactory will as a con-
sequence have direct influence on the emergent prop-
erties of the system as a whole. (Heylighen and Ger-
shenson, 2003)
While the principle of self-organization provides a
clearer understanding of the mechanisms controlling
emergence, it still does not explain how useful behav-
ior emerges. The fact that favorable interactions are
reinforced on the micro level will certainly not lead
directly to favorable behavior on the macro level.
For natural systems the obvious answer is evolu-
tion. The fundamental mechanism of natural selection
will, given enough time, lead to a solution. However,
this gives us little hope for training robots. The prob-
lem space for a robot acting in the real world grows
extremely fast. Allowing a robot to try out a pop-
ulation of randomly chosen behaviors will, even for
very simple problems, most likely never lead to a so-
lution. Consequently, the evolutionary process won’t
work since nothing can be reinforced.
Interestingly, a robot acting in the real world is,
by definition, in the same situation as many biologi-
cal systems, which obviously have evolved. The dis-
cussion above makes an evolutionary explanation to
the problem of grabbing and moving objects appear
highly unlikely. Even when including the billions of
years preceding the human era, the chance of com-
bining all the biological structures required for object
manipulation to work appears very small. And yet
evolution has given us a wonderful tool in the form
of the hand, and the neural structures underlying its
control.
The explanation for our highly flexible and dex-
terous ability to manipulate objects is of course that it
did not evolve from nothing. As such, the human hand
is not an optimal solution, nor is it anything close to
optimal. Instead is it a result of what came before it.
Small incremental changes of the mammal front legs,
which at each stage were reinforced through natural
selection, have eventually led to the human arm and
hand. (Wolfram, 2002)
Why this divergent discussion about evolution?
The manipulator of a robot has to be designed. We
are simply interested in teaching the robot to use it,
given a fairly short period of time. The point of this
sidestep into evolution is that the physical shape of the
human hand did not evolve alone, but together with
the neural system controlling it. The human child is
born with a large amount of basic reflexes, which are
all fairly simple. In robotic terms, we would proba-
bly call them purely reactive behaviors. (Thelen and
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
380

Bates, 2003; Grupen, 2006)
Some of these innate behaviors are certainly crit-
ical for the survival of the infant, such as the grip re-
flex or the sucking reflex. But many other reflexes
do not have an obvious purpose, such as the asym-
metric tonic neck reflex, landau reflex or the galant
reflex, (Grupen, 2006). Instead, reflexes like these
seem to play a key role for learning. As mentioned
above, the child is born with a set of reflexes. These
basic reflexes are, during the first four years, grad-
ually replaced by new, more complicated behaviors.
The child seams to learn through an evolutionary pro-
cess of behavioral development. New behaviors ap-
pear as a modification or combination of more basic
behaviors, while other behaviors disappear. In theo-
retical terms, this incremental development allows the
problem space to remain small even as the problems
grow more complicated. The full space of possible
solutions to the problem is never searched, but only
the parts covered by previous knowledge. Sometimes,
the small changes to the underlying control structure
result in drastic changes in behavior, which we see
in the child as the establishment of new behaviors.
This kind of incremental development process should
favor robust behavior rather than optimal. A behav-
ior which succeeds under many circumstances sim-
ply has much greater chance of survival than a perfect
solution only succeeding under very special circum-
stances.
4 CONCLUSIONS
Through out this review there has been a theme of
emergent behavior. Notions of objects in the world,
goals and concepts in general are said to emerge out
of simpler parts. The literature reviewed here fre-
quently points out several aspects critical for a sys-
tem to show emergent properties. However, it has
been much harder to find clear theories of how to con-
trol these emergent properties. In fact, one important
property of emergence seems to be that it can not be
controlled in a supervising way. Without a proper the-
ory of how to arrive at useful emergent properties, the
argument that behavior should emerge is very much
like saying that we do not know. It is generally admit-
ted that distributed and emergent control systems for
robots are very hard both to obtain and control. As
such, these approaches do not seem less problematic
than their counterparts within classical AI.
Nevertheless, the concepts presented in this re-
view open a new frame for representation of behavior.
A troubling and yet thrilling aspect of these theories is
that they span over an enormous theoretical horizon.
Some fundamental problems are solved, many new
are introduced, but just viewing the problem from a
different perspective might get us closer to a general
understanding: An understanding of what intelligence
is and how it can be created.
ACKNOWLEDGEMENTS
I thank Lars-Erik Janlert and Thomas Hellström at the
Department of Computing Science, Umeå University
for valuable input to this work.
REFERENCES
Arkin, R. C. (1998). Behaviour-Based Robotics. MIT Press.
Ashby, R. (1960). Design for a brain; the origin of adaptive
behavior. Wiley, New York.
Bovet, S. and Pfeifer, R. (2005). Emergence of coherent be-
haviors from homogenous sensorimotor coupling. In
12th International Conference on Advanced Robotics,
pages 324 – 330.
Braitenberg, V. (1986). Vehicles - Experiments in Synthetic
Psychology. The MIT Press.
Brooks, R. A. (1986). A robust layered control system for
a mobile robot. In IEEE Journal of Robotics and Au-
tomation RA-2, volume 1, pages 14–23.
Brooks, R. A. (1990). Elephants don’t play chess. Robotics
and Autonomous Systems, 6:3–15.
Brooks, R. A. (1991a). Intelligence without reason. Pro-
ceedings, 1991 Int. Joint Conf. on Artificial Intelli-
gence, pages 569–595.
Brooks, R. A. (1991b). New approaches to robotics. Sci-
ence, 253(13):1227–1232.
Brugali, D. and Salvaneschi, P. (2006). Stable aspects in
robot software development. International Journal of
Advanced Robotic Systems, 3(1).
Clark, A. and Chalmers, D. J. (1998). The extended mind.
Analysis, 58:10–23.
Corning, P. A. (2002). A venerable concept in search of a
theory. Complexity, 7(6):18–30.
Dawson, M. R. W. (2002). From embodied cognitive sci-
ence to synthetic psychology. In Proceedings of the
First IEEE International Conference on Cognitive In-
formatics (ICCI’02).
Doherty, P., Haslum, P., Heintz, F., Merz, T., and Persson,
T. (2004). A distributed architecture for autonomous
unmanned aerial vehicle experimentation. In Pro-
ceedings of the 7th International Symposium on Dis-
tributed Autonomous Systems.
Flake, G. W. (1998). The Computational Beauty of Nature.
MIT Press, Cambridge, Massachusetts.
COGNITIVE PERSPECTIVES ON ROBOT BEHAVIOR
381

Galliers, J., Wilson, S., and Fone, J. (2006). A method for
determining information flow breakdown in clinical
systems. Special issue of the International Journal
of Medical Informatics.
Georgeff, M. P. and Lansky, A. L. (1987). Reactive reason-
ing and planning. In AAAI, pages 677–682.
Gowdy, J. (2000). Emergent Architecture: A Case Study
for Outdoor Mobile Robots. PhD thesis, The Robotics
Institute. Carnegie, Carnegie Mellon University.
Greeno, J. G. (1993). Special issue on situated action. In
Cognitive Science, volume 17, pages 1–147. Ablex
Publishing Corporation, Norwood, New Jersey.
Grupen, R. (2006). The developmental organization of
robot behavior. Oral presentation during the 6th In-
ternational UJI Robotics School.
Heylighen, F. and Gershenson, C. (2003). The meaning of
self-organization in computing. In IEEE Intelligent
Systems.
Heylighen, F., Heath, M., and Overwalle, F. V. (2004).
The emergence of distributed cognition: a concep-
tual framework. In Collective Intentionality IV, Siena,
Italy.
Hollan, J., Hutchins, E., and Kirsh, D. (2000). Distributed
cognition: toward a new foundation for human-
computer interaction research. ACM Trans. Comput.-
Hum. Interact., 7(2):174–196.
Hutchins, E. (1995). Cognition in the Wild. MIT Press,
Cambridge, Massachusetts.
Hutchins, E., E, B., Holder, R., and P, A. (2002). Culture
and flight deck operations. Prepared for the Boeing
Company.
Hutchins, E. and Holder, B. (2000). Conceptual models for
understanding an encounter with a mountain wave. In
HCI-Aero 2000, Toulouse, France.
Hutchins, E. and Klausen, T. (1996). Distributed cognition
in an airline cockpit. Cognition and communication
at work. Y. E. a. D. Middleton. New York, Cambridge
University Press, pages 15–34.
II, R. A. P. and Campbell, C. L. (2003). Robonaut task
learning through teleoperation. In Proceedings of the
2003 IEEE, International Conference on Robotics and
Automation, pages 23–27, Taipei, Taiwan.
Kaiser, M. and Dillmann, R. (1996). Building elementary
robot skills from human demonstration. International
Symposium on Intelligent Robotics Systems, 3:2700–
2705.
Maes, P. (1990). Situated agents can have goals. Robotics
and Autonomous Systems, 6:49–70.
Maes, P., editor (1991). Designing Autonomous Agents.
MIT Press, Elsevier.
Matari
`
c, M. J. (1992). Integration of representation into
Goal-Driven Behavior-Based robots. In IEEE Trans-
actions on Robotics and Automation, volume 8, pages
304–312.
Matari
`
c, M. J. (1997). Behavior-Based control: Examples
from navigation, learning, and group behavior. Jour-
nal of Experimental and Theoretical Artificial Intelli-
gence, 9(2–3):323–336.
Murphy, R. R. (2000). Introduction to AI Robotics. MIT
Press, Cambridge, Massachusetts.
Nicolescu, M. (2003). A Framework for Learning
from Demonstration, Generalization and Practice in
Human-Robot Domains. PhD thesis, University of
Southern California.
Pfeifer, R. and Scheier, C. (1997). Sensory-motor coordi-
nation: the metaphor and beyond. Robotics and Au-
tonomous Systems, 20(2):157–178.
Pfeifer, R. and Scheier, C. (2001). Understanding Intelli-
gence. MIT Press. Cambrage, Massachusetts.
Russell, S. and Norvig, P. (1995). Artificial Intelligence: A
Modern Approach. Prentice Hall, NJ.
Schoppers, M. (1987). Universal plans for reactive robots
in unpredictable demains. In IJCAI-87:, pages 1039–
1046.
Shea, C. H. and Wulf, G. (1995). Schema theory - a critical
appraisal and reevaluation. Journal of Motor Behav-
ior.
Simon, H. A. (1969). The Sciences of the Artificial. MIT
Press, Cambridge, Massachusetts.
Stillings, N. A., Weisler, S. E., Chase, C. H., Feinstein,
M. H., Garfield, J. L., and Rissland, E. L. (1995). Cog-
nitive Science. MIT Press, Cambridge, Massachusetts.
Suchman, L. A. (1987). Plans and Situated Actions. PhD
thesis, Intelligent Systems Laboratory, Xerox Palo
Alto Research Center, USA.
Thelen, E. and Bates, E. (2003). Connectionism and dy-
namic systems: Are they really different? Develop-
mental Science, 6(4):378–391.
Walter, W. (1963). The Living Brain. Norton & Co., New
York.
Wolfram, S. (2002). A New Kind of Science. Wolfram Me-
dia, 1 edition.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
382
