
MULTI-LEVEL GRID STRATEGIES FOR RAY TRACING
Improving Render Time Performance for Row Displacement Compressed Grids
Vasco Costa and Jo
˜
ao Madeiras Pereira
INESC-ID / IST, Rua Alves Redol 9, Apartado 13069, 1000-029 Lisboa, Portugal
Keywords:
Ray tracing, Grid.
Abstract:
Grids have some of the lowest ray tracing acceleration structure build times. This is because acceleration
structure construction is analogous to a sorting algorithm. The ideal behavior for a sorting algorithm is to have
O(N) time complexity regarding the number of elements. Grids also have O(N) construction time complex-
ity regarding the number of primitives unlike other commonly used acceleration structures, such as kd-trees
or bounding volume hierarchies, which have an O(N logN) lower bound. This trait makes grid ray tracing
interesting for many applications including animation. Recent algorithmic developments have also made it
possible to achieve one-level grid construction, with low memory requirements, by compressing empty grid
cells. Unfortunately one-level grids achieve lower render time performance than recursive structures such as
multi-level grids. We present a method for rapidly building a grid with similarly good render time perfor-
mance and using less memory than classic multi-level grids. We demonstrate that this method is a remarkably
effective solution for interactive ray tracing of large scanned models.
1 INTRODUCTION
Ray tracing is having a renaissance. One sign of this
is that traditionally skeptical graphics hardware man-
ufacturers support, or are in the process of supporting
it. The reasons for this support are varied. Improved
hardware performance, e.g., achieved using parallel
computation methods, provided interactive or even re-
altime rendering rates. The need for visualizing more
complex and realistic scenes increases interest in a
technique which more readily supports shadows, re-
flections, refractions, and diffuse interreflections.
The main objective of this work was to visualize
large scanned models for heritage applications. These
kinds of scenes typically feature relatively uniform
scene density. However it was expected that the sys-
tem would visualize other kinds of scenes, if required.
The use of an acceleration structure for ray trac-
ing is required to improve the speed of ray/primi-
tive intersection queries to high levels of performance.
The push towards parallel algorithms also meant a
change in the most popular ray tracing acceleration
structures. Bounding volume hierarchies (BVHs) and
grids are easier to parallelize, especially in GPU ar-
chitectures with a limited number of registers and
cache memory, than the previously favored kd-tree ac-
celeration structure. Grid acceleration structures pro-
vide an appropriate method for scene spatial subdi-
vision since they have a reduced construction com-
plexity compared to other highly hierarchical, deeply
nested structures.
Grid acceleration structures were introduced by
(Fujimoto et al., 1986), who applied 3DDDA, a 3D
extension of the raster line drawing algorithm, to im-
prove render times by changing the acceleration struc-
ture traversal method. A one-level grid structure with
identical cubically shaped cells was used to eliminate
the overhead of vertical traversal.
Eventually a new grid traversal algorithm with
improved performance was independently developed
by (Amanatides and Woo, 1987; Cleary and Wyvill,
1988) which is still in use today. (Jevans and
Wyvill, 1989) reintroduced multi-level structures to
improve render time performance for irregularly dis-
tributed scenes without reintroducing excessive verti-
cal traversal overhead.
Afterwards there was a hiatus on grid ray tracing
research where hybrid structures were attempted with
mixed results (Havran et al., 1999).
(Lagae and Dutr
´
e, 2008) employed compression
(i.e. hashing) to reduce the memory footprint of this
kind of acceleration structure. They achieved this
by compressing empty cells. By allocating all mem-
ory before inserting primitives into the data structure,
219
Costa V. and Madeiras Pereira J. (2010).
MULTI-LEVEL GRID STRATEGIES FOR RAY TRACING - Improving Render Time Performance for Row Displacement Compressed Grids.
In Proceedings of the International Conference on Computer Graphics Theory and Applications, pages 219-224
DOI: 10.5220/0002815302190224
Copyright
c
SciTePress

build time performance was also improved. The ren-
der time performance of one-level grid algorithms is
however inferior to that of multi-level grids (Ize et al.,
2007).
(Kalojanov and Slusallek, 2009) take advantage of
the high parallelism in GPUs to improve grid ray trac-
ing performance.
(Kim et al., 2009) have created compressed ver-
sions of the bounding volume hierarchy (BVH) ac-
celeration structure, one of the acceleration structures
first used in ray tracing. Kim et al. also compress
the triangle mesh and page data to the disk provid-
ing increased memory savings. BVH acceleration
structures have higher construction time complexity
than grids however. BVH construction complexity is
O(N logN) versus a grid construction complexity of
O(N) where N is the number of primitives in a scene.
This work describes our efforts to combine the de-
sirable traits of multi-level grid render time perfor-
mance, with the low build time and memory con-
sumption characteristics of row displacement com-
pression.
Section 2 describes a classic multi-level array
grid implementation used for performance compar-
ison purposes. Section 3 introduces our multi-level
hashed grid implementation. We present analysis re-
sults in Section 4.
2 MULTI-LEVEL ARRAY GRID
This section discusses a classic multi-level array grid
implementation, used here for comparison purposes,
where each cell is recursively refined according to the
number of items it contains.
The data structure for the multi-level array grid
(Listing 1) consists of a nested grid of nodes. Each in-
terior node features the minimum and maximum ex-
tents, grid dimensions (x,y,z), and the size of each
cell. The cell size is redundant information that can
be computed from the previous values, but caching
it provides improved render time performance. In a
typical scene, the number of leaf nodes is much larger
than the number of inner nodes, hence optimizing the
size of inner nodes provides little gain. The number
of empty leaf cells can be quite high. These are rep-
resented as a null pointer in the inner node cell array
to reduce memory requirements.
s t r u c t In n er N od e {
f l o a t min [ 3 ] ;
f l o a t max [ 3 ] ;
i n t dim [ 3 ] ;
f l o a t d e l t a [ 3 ] ;
Gri dNode ∗∗ c e l l s ;
} ;
s t r u c t Grid Node {
i n t i n d e x ;
/ / low b i t : i n n e r ( 1 ) or l e a f ( 0 )
u n i o n {
s t r u c t {
i n t ∗ i t e m s ;
} l e a f ;
s t r u c t {
In n er N od e ∗ i n t e r i o r ;
} i n n e r ;
} ;
} ;
Listing 1: C data structure.
The number of items in a leaf node is stored in the
index field high bits.
2.1 Construction
Data structure construction proceeds as follows. The
scene’s bounding box is computed. The first node is
initialized as a leaf node containing all scene items.
Each node is recursively processed in the following
manner:
If the number of items in the node is less than 8 or
the grid depth is over 2, the node remains a leaf and
recursion stops. We can simulate a one-level grid by
choosing a grid depth of 1.
Otherwise, the node is expanded to an inner node.
The following memory conservative heuristic, at-
tributed to (Woo, 1992), is used to determine the grid
dimensions for each extent:
M
i
=
S
i
max{S
i
}
3
p
ρN (i ∈ {x,y, z}) (1)
Where S
i
is the scene bounding box size in dimen-
sion i, ρ density factor is typically 4.
Next delta is computed and the cells array is
allocated with size N.
The item lists for each cell of the inner node are
computed. If the item list is empty, that cell pointer
is marked as null. If the item list for that cell is not
empty, the cell is initialized as a leaf node containing
the items in question. Recurse.
3 MULTI-LEVEL HASHED GRID
Some characteristics of the classic algorithm, de-
scribed in the previous section, were noticeable via
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
220
profiling. Grid traversal dominates render time,
and one-level grids spend twice the time doing ray-
triangle intersections than multi-level grids. In at-
tempting to improve render-time performance the fol-
lowing hypothesis was posed: the number of ray-
triangle intersections can be reduced by using smaller
cells, with less triangles per cell. To reduce traver-
sal time a multi-level structure to skip empty cells in
larger steps can be employed.
Increasing the grid density factor ρ in Heuristic 1
results in a finer grid with smaller cells as explained in
Section 3.1). To have reasonable memory consump-
tion empty grid cells are compressed using the algo-
rithm described at Section 3.2). Finally empty regions
of space are skipped during traversal by using macro-
cells as explained at Section 3.3.
3.1 Heuristic
First a finely divided hashed grid (Section 3.2) is built,
using Heuristic 1 to determine the grid dimensions,
but with a high density parameter ρ to reduce cell size.
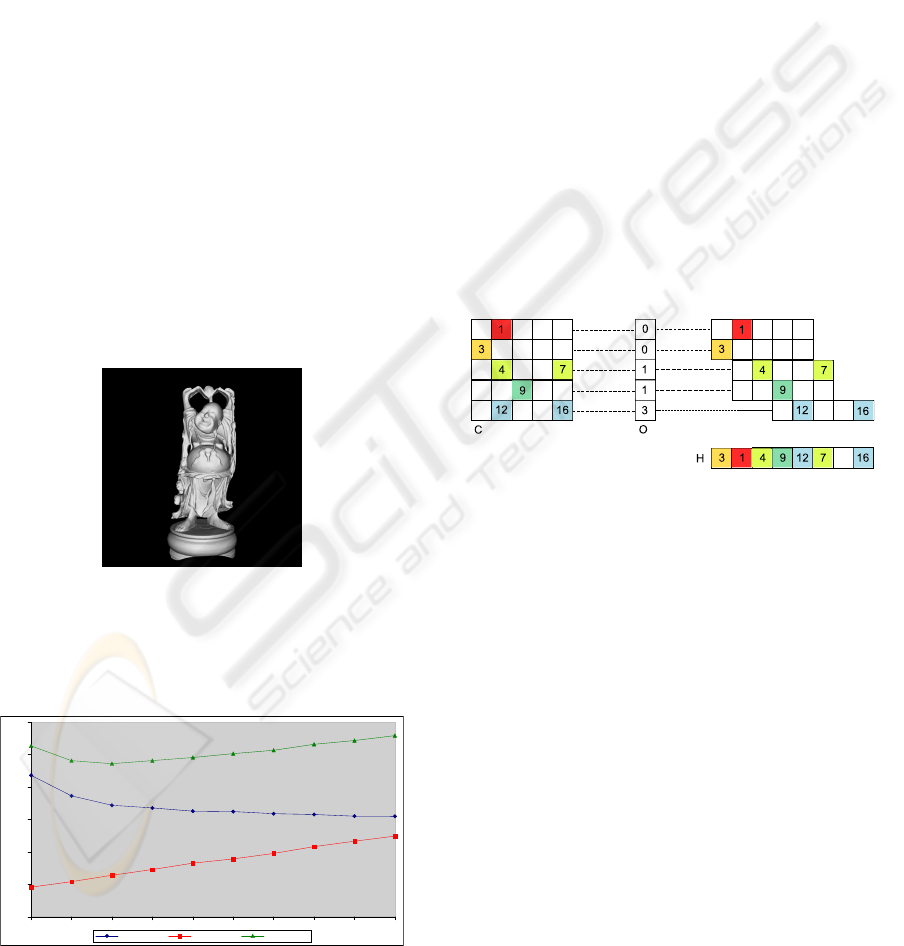
We empirically chose the grid density parameter
by analyzing the behavior for the Buddha scene (Fig-
ure 1) as can be seen in the chart at Figure 2.
Figure 1: Buddha scene at 1024 × 1024 resolution.
We selected a grid density ρ of 32 since it features
adequate render time without having a severe impact
on time to image.
8 16 24 32 40 48 56 64 72 80
0
0.2
0.4
0.6
0.8
1
1.2
seconds
Render Time Build Time Time to Image
Figure 2: Timings for the Buddha scene according to grid
density.
3.2 Hashed Grid Construction
An array with cell offsets is a linear representation of
a sparse 3D matrix. Given the data is static, a perfect
hash function, with no collisions, can be computed.
Hashing was done using row displacement compres-
sion (Lagae and Dutr
´
e, 2008) in order to avoid storing
empty array cells. A description of the algorithm is
provided here as a courtesy to the reader.
The data structure for the hashed grid implemen-
tation consists of four static arrays. Array L is a 1D
array of machine words which contains the indexes of
all cell items. Array H (hash table) is a linearized and
hashed 3D array of machine word indexes into L. The
item list size for a cell i is given by H[i]−H[i+1]. Ar-
ray O (offset table) is a linearized 2D array of machine
word indexes into H. O has M
y
× M
z
size. Finally, ar-
ray D (domain bits) is similar to array C (which stores
an index to the beginning of the item list for each
cell) but with one bit per cell. D has N size where
N = M
x
× M
y
× M
z
. D stores if a given cell is not
empty. Elements in the hash table can be accessed in
constant time.
Figure 3: Row displacement compression. The 2D matrix
C is compressed into hash table H by displacing the rows,
and storing the offset of each row in offset table O.
Hashed grid data structure construction proceeds as
follows. First the scene’s bounding box is com-
puted. Then the grid heuristic, described in Sec-
tion 3.1, is used to determine the grid dimensions
M
x
× M
y
× M
z
= N.
Array D is allocated with size N and its bits are
initialized to zero. For each item whose bounding box
intersects a given cell i, D[i] is set to one. After this
step, D[i] is an array containing which cells are not
empty. D cells can be indexed in 1D as D[d(x,y,z)]
where:
d(x,y, z) = ((M
y
× z) + y) × M
x
) + x
The offset table can now be filled. First O is allo-
cated with size M
y
× M
z
. A temporary bit array bH,
is allocated with a size of double the number of non
empty cells and its bits initialized to zero, to aid in its
construction. For each grid row (y, z) in O, the small-
est offset is found, starting from the last offset. If a
given D[d(0,y, z) .. d(M
x
− 1, y,z)] row’s bits collide
MULTI-LEVEL GRID STRATEGIES FOR RAY TRACING - Improving Render Time Performance for Row
Displacement Compressed Grids
221
Table 1: Scene statistics and test results.
Office Conference Bunny Dragon Buddha Asian Dragon Thai Statue Lucy
Scene
Triangles 36.31 K 282.76 K 69.45 K 871.41 K 1.09 M 7.22 M 10 M 28.06 M
Memory 910.05 KB 6.29 MB 1.21 MB 14.98 MB 18.67 MB 123.92 MB 171.66 MB 481.61 MB
Multi-Level Array Grid
Memory 7.06 MB 42.68 MB 17.62 MB 106.72 MB 109.36 MB 700.80 MB 0.99 GB -
Build Time 0.14 s 1.11 s 0.37 s 1.86 s 1.90 s 13.89 s 19.91 s -
Render Time 1.10 s 1.30 s 0.45 s 0.59 s 0.58 s 0.79 s 1.05 s -
One-Level Hashed Grid
Memory 552.59 KB 4.83 MB 0.98 MB 9.87 MB 12.68 MB 50.85 MB 78.75 MB 199.04 MB
Build Time 0.01 s 0.07 s 0.02 s 0.28 s 0.29 s 1.70 s 2.40 s 6.89 s
Render Time 2.01 s 2.13 s 0.56 s 0.75 s 0.66 s 1.42 s 1.60 s 1.61 s
Multi-Level Hashed Grid
Memory 1.55 MB 5.62 MB 2.39 MB 14.60 MB 15.59 MB 70.37 MB 105.78 MB 223.77 MB
Build Time 0.02 s 0.09 s 0.05 s 0.43 s 0.35 s 3.36 s 3.91 s 9.05 s
Render Time 1.87 s 2.04 s 0.49 s 0.42 s 0.40 s 0.75 s 0.78 s 0.94 s
with the bits in the current offset, at the temporary
bit array bH, then the offset is incremented and that
offset is tested for bit collisions.
Following this step, the offsets into the hash table
for each row (y,z) have been computed and stored into
O[o(y,z)] where:
o(y,z) = (M
y
× z) + y
The hash table can now be adequately computed.
First H is allocated with size NH equal to the position
of the last non empty bit in the temporary bit array bH
plus one and its machine words are initialized to zero.
The offsets into the item lists are then computed.
For each item whose bounding box intersects a
given cell i = (x,y, z), H[h(x,y,z)] is incremented by
one where:
h(x,y, z) = O[(M
y
× z) + y] + x
Note that the hash function h(x,y,z) will always
be valid in this case, since we are only inserting items
into cells which have already been determined to be
non empty in a prior step. At this point H stores how
many items are in each non empty cell.
The indexes of the item lists can now be com-
puted. However it is necessary, for the next step, to
know how many item indices have already been in-
serted during iteration of the item lists. For this it is
necessary to know, for each cell, the index into L for
the last item in that cells item list. The computation
for this step is done as follows:
for (i=1; i<=NH; ++i) {
H[i] += H[i-1];
}
At this point things should look pretty famil-
iar. Following this intermediate step, the sum of the
length of all item lists is stored at H[NH − 1]. Hence
L is now allocated with size H[NH − 1]. Items can
now be inserted into item list L, and each cell index
updated to point to the beginning of the item list. The
following procedure can be used:
for (i=NI-1; i>= 0; --i) {
// for each cell j intersected by object i
L[--H[j]] = i;
}
After this procedure is complete, L is filled with
all list item indexes, and each cell H[i] indexes into
the first item of its item list in a linear fashion. All
indexes in the item list are sorted. This algorithm
has complexity linear in time to the number of scene
items, except for hash function computation, which
has worst case time complexity of O(M
4/3
) where M
is the number of cells in the grid.
3.3 Macrocells Construction
Next multi-level macrocells, as described in (Wald
et al., 2006), are built to skip empty cells in larger
steps during traversal. Macrocells overlay a coarser
grid over the finely divided grid. The macrocells for
each level consist of a 3D bit array with information
if a region of space is empty of not. To speed up this
construction step macrocells are downscaled by a fac-
tor of 6 on each extent. We arrived at this value by em-
pirically analyzing algorithm behavior for the tested
scenes. (Wald et al., 2006) reached the same value
with a different heuristic and test scenes. Macrocell
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
222

downscaling can be done with a quick 3D bitmap
scaling operation of 3D bitmap D.
There is no recursion during construction.
4 RESULTS AND DISCUSSION
In this section a comprehensive evaluation of the per-
formance of the grid rendering method described in
this paper is presented.
The methods implemented in this work were done
in C++ using the STL and Boost. Assembly code or
intrinsics were not used. All timings were done on a
computer with a single two-core 3GHz Intel Core 2
Duo CPU with 2GB of memory. Only a single thread
was employed. All images were rendered at a resolu-
tion of 1024×1024 with one ray per pixel and diffuse
shading.
Office Conference Bunny Dragon Buddha Asian Dragon Thai Statue Lucy
0
200
400
600
800
1000
1200
memory (MB)
Multi-Level Array Grid One-Level Hashed Grid Multi-Level Hashed Grid
Figure 4: Acceleration structure memory usage statistics
for the tested scenes.
Table 1 shows scene statistics such as number of
triangles, memory used by the triangles. Scene mem-
ory usage is computed by using 12 bytes per trian-
gle to store vertex index information (three machine
words for each vertex index), plus 12 bytes per ver-
tex (three floating point numbers for each coordinate).
This provides a two-fold decrease in memory used
for the tested scenes versus the scene storage method
used by (Lagae and Dutr
´
e, 2008). This was particu-
larly important given the system used for these tests
has much less memory than the system used by the
before mentioned authors. Ray-triangle intersection
was done using the (M
¨
oller and Trumbore, 2005) in-
tersection algorithm because of its low memory re-
quirements.
The memory footprint for hashed grid implemen-
tations is roughly one order or magnitude lower than
for regular, non-compressed grids. Multi-level hashed
grids have slightly higher memory consumption than
one-level hashed grids as can be seen in Figure 4. In
particular the non-compressed multi-level array grid
algorithm exhausted available system memory for the
Lucy scene.
Office Conference Bunny Dragon Buddha Asian Dragon Thai Statue Lucy
0
5
10
15
20
build time (s)
Multi-Level Array Grid One-Level Hashed Grid Multi-Level Hashed Grid
Office Conference Bunny Dragon Buddha Asian Dragon Thai Statue Lucy
0
0.5
1
1.5
2
2.5
render time (s)
Multi-Level Array Grid One-Level Hashed Grid Multi-Level Hashed Grid
Figure 5: In the top chart, acceleration structure build time
statistics can be seen. At bottom, the chart has render time
statistics for the tested scenes. Timings are the average
of several test runs. Results for the proposed multi-level
hashed grid acceleration structure are at right.
The build time for hashed grids is short and
roughly linear with the number of triangles as can be
seen in Figure 5. This gives a short time to image
useful for dynamic scenes. Multi-level array grids be-
have poorly regarding build time, getting even worse
for the more complex scenes.
Render times, as expected, are better for the multi-
level grids. Multi-level hashed grids behave espe-
cially well for the larger tested scanned scenes, with
the most empty cells, having around twice the render-
time performance of one-level hashed grids due to
macrocells. These results are better than the 30%
speedup reported by (Wald et al., 2006). For small
non-uniform density scenes, such as Office and Con-
ference, performance is better using the classic adap-
tive multi-level array grid scheme.
For comparison purposes (Lagae and Dutr
´
e, 2008)
report a build time of 1.76 s and a render time of 1.43
s for the Thai Statue scene at 1024 × 1024 resolu-
tion using the one-level hashed grid algorithm. The
implementation of that algorithm in our framework
has a build time of 2.40 s and a render time of 1.60
s for the same scene. Using the multi-level hashed
grid algorithm, described here, build time is 3.91 s
but render time is much improved at 0.94 s for the
same scene. This is a 52% render time performance
MULTI-LEVEL GRID STRATEGIES FOR RAY TRACING - Improving Render Time Performance for Row
Displacement Compressed Grids
223

improvement versus (Lagae and Dutr
´
e, 2008), even
using worse hardware.
Estimated algorithm performance is ≈ 4.26 FPS
for the Thai Statue scene at 1024×1024 resolution on
a quad core system assuming a linear speedup, com-
mon in ray tracing. This compares well with the 3.14
FPS KD-tree performance achieved by (Shevtsov
et al., 2007) on such a system.
5 CONCLUSIONS AND FUTURE
WORK
Multi-level hashed grids have good behavior for large
scanned models, having twice the render-time perfor-
mance of one-level hashed grids, with a small penalty
in terms of build time or memory usage. They suc-
cessfully combine the better traits of classic multi-
level array grids and one-level hashed grids, manag-
ing to provide best of class performance for scanned
scenes.
There still seems to be room for improvement
in regards to speeding up grid traversal by skipping
empty cells. Possibilities include proximity clouds
(Cohen and Sheffer, 1994) and macro-regions (Dev-
illers, 1989). This work also does not employ SIMD
instructions or ray coherence. All of these techniques
have a chance of significantly improving performance
and should be worthy of further pursuit.
ACKNOWLEDGEMENTS
It would not have been possible to make the tests in
this work without the scanned models from the Stan-
ford 3D Scanning Repository. Office and Confer-
ence scenes were created by Anat Grynberg and Greg
Ward.
We would also like to thank the anonymous re-
viewers, for their comments helped improve this
work.
Supported by the Portuguese Foundation for
Science and Technology project VIZIR (PTD-
C/EIA/66655/2006).
REFERENCES
Amanatides, J. and Woo, A. (1987). A fast voxel traversal
algorithm for ray tracing. In Eurographics ’87, pages
3–10.
Cleary, J. and Wyvill, G. (1988). Analysis of an algorithm
for fast ray tracing using uniform space subdivision.
The Visual Computer, 4(2):65–83.
Cohen, D. and Sheffer, Z. (1994). Proximity clouds - an ac-
celeration technique for 3D grid traversal. The Visual
Computer, 11(1):27–38.
Devillers, O. (1989). The macro-regions: an efficient space
subdivision structure for ray tracing. In Eurographics
’89, pages 27–38.
Fujimoto, A., Tanaka, T., and Iwata, K. (1986). Arts: Ac-
celerated ray-tracing system. Computer Graphics and
Applications, IEEE, 6(4):16–26.
Havran, V., Sixta, F., and Databases, S. (1999). Comparison
of hierarchical grids. Ray Tracing News, 12(1):1–4.
Ize, T., Shirley, P., and Parker, S. (2007). Grid creation
strategies for efficient ray tracing. In Interactive Ray
Tracing, 2007. RT’07. IEEE Symposium on, pages 27–
32.
Jevans, D. and Wyvill, B. (1989). Adaptive voxel subdivi-
sion for ray tracing. In Graphics Interface ’89, pages
164–172.
Kalojanov, J. and Slusallek, P. (2009). A parallel algorithm
for construction of uniform grids. In Proceedings of
the 1st ACM conference on High Performance Graph-
ics, pages 23–28. ACM.
Kim, T., Moon, B., Kim, D., and Yoon, S. (2009). RACB-
VHs: random-accessible compressed bounding vol-
ume hierarchies. In SIGGRAPH 2009: Talks, page 46.
ACM.
Lagae, A. and Dutr
´
e, P. (2008). Compact, fast and robust
grids for ray tracing. Computer Graphics Forum (Pro-
ceedings of the 19th Eurographics Symposium on Ren-
dering), 27(8).
M
¨
oller, T. and Trumbore, B. (2005). Fast, minimum stor-
age ray/triangle intersection. In International Con-
ference on Computer Graphics and Interactive Tech-
niques. ACM Press New York, NY, USA.
Shevtsov, M., Soupikov, A., and Kapustin, A. (2007).
Highly parallel fast kd-tree construction for interactive
ray tracing of dynamic scenes. In Computer Graphics
Forum, volume 26, pages 395–404. Citeseer.
Wald, I., Ize, T., Kensler, A., Knoll, A., and Parker, S.
(2006). Ray tracing animated scenes using coher-
ent grid traversal. In International Conference on
Computer Graphics and Interactive Techniques, pages
485–493. ACM Press New York, NY, USA.
Woo, A. (1992). Ray tracing polygons using spatial subdi-
vision. In Proceedings of the conference on Graph-
ics interface ’92, pages 184–191, San Francisco, CA,
USA. Morgan Kaufmann Publishers Inc.
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
224
