
REAL-TIME HAND LOCATING BY MONOCULAR VISION
Li Ding, Jiaxin Wang
Department of Computer Science and Technology, Tsinghua University, Beijing, China
Christophe Chaillou
ALCOVE, INRIA Lille Nord Europe, Lille, France
Chunhong Pan
LIAMA,
Institute of Automation, Chinese Academy of Sciences, Beijing, China
Keywords: Hand Tracking, Object Occlusion, Possibility Support Map.
Abstract: The research on real-time hand locating by monocular vision has a considerable challenge that to track
hands correctly under occlusion situation. This paper proposes a robust hand locating method which
generates a possibility support map by integrating information from color model, position model and motion
model. For better accuracy, hands are modeled as ellipses. The PSM depends on both previous model
information and the relationship between models. Hand pattern search is then processed on the generated
map by two steps which firstly locates the center position of hand and secondly determines the size and
orientation. Our experimental results show that the proposed method is efficient under situation that one
hand is occluded by the other one. Our current prototype system processes image at 10~14 frames per
second.
1 INTRODUCTION
In recent decade, more and more Human Computer
Interaction(HCI) applications apply vision-based
interaction input methods where users can directly
give instructions by natural gestures instead of
typing commands on a keyboard or manipulating a
mouse. Quantities of applications and systems
retrieve information by monocular vision: some of
them need only 2D information and others require a
3D approach (for example virtual avatar control).
Hand locations are mostly computed, because we
routinely use upper limbs especially hands gestures
when we describe or direct during communications/
interactions.
The systems described in (Tamura and
Kawasaki, 1998) and (Starner and Pentland, 1995)
focus on tracking one hand for sign language
recognition. These systems find and track a hand
from a video image sequence and analyse its shape
and motion. As they are only able to track single
hand, they become ineffective when hand occlusion
happens. They either throw a warning to user or
ignore the overlapping period. However, in practical
situations, user often move their hand in front of the
face or the other hand. This observation motivates us
to develop a robust method for locating hands under
occlusion in real-time for HCI application by
monocular vision.
In this paper, we present a real-time hand
locating system which tracks the hands of a person
who is driving his virtual avatar by his gestures. The
system locates the hands even if they are occluded
by each other. The next section introduces some
related hand locating approaches and systems. In
section 3, we will show the generation procedure of
Possibility Support Map (PSM) which is the basis
for a further two-step tracking procedure (described
in section 4). Some experimental results are shown
in section 5.
406
Ding L., Wang J., Chaillou C. and Pan C. (2010).
REAL-TIME HAND LOCATING BY MONOCULAR VISION.
In Proceedings of the International Conference on Computer Vision Theory and Applications, pages 406-412
DOI: 10.5220/0002816304060412
Copyright
c
SciTePress

2 RELATED WORK
There are mainly two categories of methods to
locate hands in a video sequence. One of them is
based on skin region detection. The approach in
(Hasanuzzaman, 2004) detects skin region in YUV
color space, and uses x coordinate to extinguish left
and right hands. They classify the extracted hands
locations into 8 command gesture patterns in order
to operate a robot. An approach based on region
SVM learning is proposed in (Han, 2006), which
automatically segment skin regions out of a video
frame and assume the largest three regions as head
and hands. Both of these approaches are effective
locating two hands under the condition that skin
regions are isolated to each other. In order to
distinguish two hands when they get close, several
attempts are made. In (Lee and Cohen, 2006), blob
merging technique is introduced to locate the
forearm (therefore locate the hand) in static images.
The skin regions of forearm and hand are modeled
as ellipses under the assumption that user wears
shorts. Askar et al. (Askar, 2004) tried to handle the
situation with contact between hands. The approach
depends on row and column histograms analysis of
the mask binary image, therefore they may fail due
to the noises derived from background suppression.
The other category is based on object tracking
techniques. Meanshift(Comaniciu and Ramesh,
2000) and Camshift(Bradski, 1998) are widely used
in tracking single object. However these two
methods could not handle the situation of multiple
objects (two hands and probably head). The methods
will lose object or mislead to track inappropiate
object when objects are getting close to each other.
In (Vacavant and Chateau, 2005) particle filter is
used to find proper positions of head and hands. It
performs at 6 frame per second, which is not suitable
for real-time application. Hand occlusion is the main
challenge in hands tracking, because not only the
overlapping often occurs, but also the hand size and
the hand orientation are both changing during
occlusion. Many systems like (Schreer, 2005),
(Kirubarajan and BarShalom, 2001), (Coogan, 2006)
and (Imagawa, 1998) will warn the user to separate
hands when occlusion is detected and the systems
will restart tracking after then.
Real-time hands locating, especially when
occlusion happens, is still a tempting research area.
In our system, we firstly generate PSM with three
aspects of hand information, and then apply tracking
procedure on the PSM.
3 POSSIBILITY SUPPORT MAP
GENERATION
For each frame, a multi-channel PSM is generated to
support the further tracking procedure. The channel
number of PSM is set to the quantity of objects
which are being tracked. In our case, we track three
objects: two hands as well as head. Each channel of
the map is generated from original image and every
pixel in it represents the possibility of coresponding
object. The possibility that a pixel supports the
object is calculated by combining color information,
position information and motion information.
3.1 Color Information
Although colors captured by the camera are in RGB
mode, they are converted into HSV mode, since
color footprint is more distinguishable and less
sensitive to illumination changes in the hue
saturation space. Therefore color C could be
represented by (C
h
, C
s
). For the pixel in color C, the
possibility of being in the skin region is denoted as
p(skin|C) and calculated by equation 1which is
derived from Bayesian Equation.
)(
)()|(
)|(
Cp
skinpskinCp
Cskinp
(1)
In our situation, the assumption that every pixel
has the same possibilities p(C), p(skin) and p(C|skin)
is made, so that following equations can be used.
t
i
i
t
i
i
n
skinn
t
t
t
N
skinN
skinp
1
1
)(
)(
)(
(2)
t
i
i
t
i
i
n
Cn
t
t
t
N
CN
Cp
1
1
)(
)(
)(
(3)
t
i
i
t
i
i
skinn
skinCn
t
t
t
skinN
skinCN
skinCp
1
1
)(
)|(
)(
)|(
)|(
(4)
Where n
i
(C|skin) is the number of skin region
pixels in color C; meanwhile n
i
(C), n
i
(skin) and n
i
are respectively the number of pixels in color C, the
number of skin region pixels and total pixel number
for the i
th
frame.
REAL-TIME HAND LOCATING BY MONOCULAR VISION
407
If the skin region portion in the consecutive
frames hardly changes, Equation 2~4 can be derived
as follow.
)(
)|(
)|()1()|(
1
skinn
skinCn
rskinCprskinCp
t
t
tt
(5)
t
t
tt
n
Cn
rCprCp
)(
)()1()(
1
(6)
t
t
tt
n
skinn
rskinprskinp
)(
)()1()(
1
(7)
These equations are used to update possibilities
after each frame, and the factor r is called learning
rate which is set to 0.05 in our system. The larger r
is, the faster the system adapts to currently captured
image.
The color likelihood function is defined as
)|()( CskinpPp
color
(8)
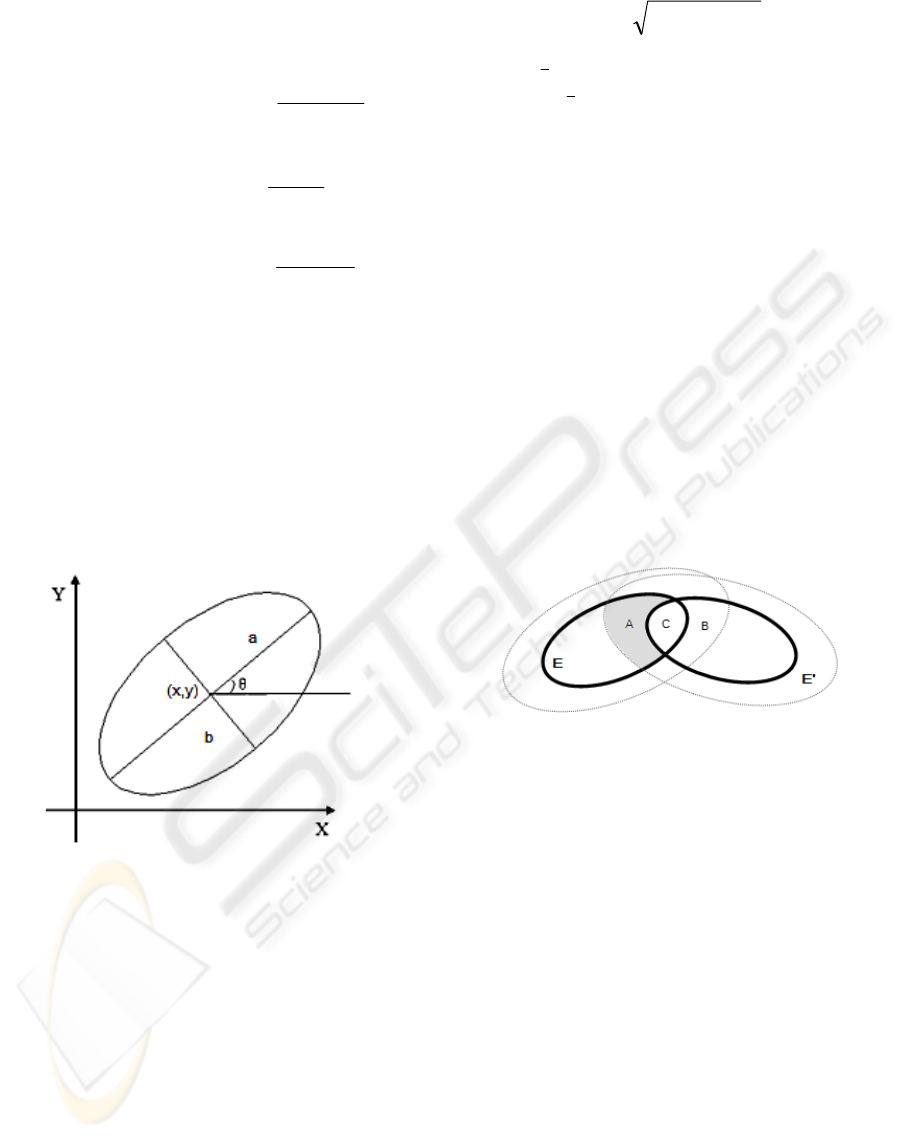
3.2 Position Information
Figure 1: The hand is represented by ellipse model.
Normal boundary box (rectangle model) provides
the central position of hand, yet could not properly
tell whether a pixel within the box is a hand pixel.
As the hand can be considered as an ellipse in most
occasions, we use ellipse model to describe a hand
for better accuracy. The ellipse model is defined as
(x,y,a,b,θ), where (x,y) represents the center of the
hand; (a,b) are two axis which indicates the hand
size; and θ is the angle between axis a and horizontal
axis, which describes the orientation of hand (See
Figure 1).
Given a pixel P(x
p
,y
p
) and a hand ellipse model
E(x
e,
y
e
,a
e
,b
e
,θ
e
), the relative distance from P to E is
defined as D(P,E) which is calculated by following
equations.
22
),( ydxdEPD
rr
(9)
e
e
p
p
ee
ee
b
a
r
r
y
x
y
x
yd
xd
cossin
sincos
0
0
1
1
(10)
It is obvious that P is inside model E (including
the boundary) when the value of D(P,E) is less than
or equals 1 and on the contrary P is outside E when
the value is larger than 1. Thus we define the
position likelihood function of pixel P and hand
model E as
(11)
The possibility is set to 100% without any doubt,
when the pixel is inside the hand model. And the
possibility is set to 0, if the relative distance is larger
than certain threshold T (in our system T=16).
Otherwise, the possibility is defined by certain
expression of the relative distance shown in equation
11.
Figure 2: Two ellipse models occlude. For each model,
pixels in the black circle are inside the ellipse E and pixels
between the black and gray circles probably belong to E.
Considering the contact situation of two models,
the value of position likelihood function between P
and E will be impacted by model E'. As shown in
figure 2, when P is in area B, P is 100% part of E'
but is not sure if it is in E. In this situation the
possibility p
position
(P,E) will be reduced by a
reduction rate ρ. Usually, ρ is no less than 1, and can
even be infinitive in extreme situation. Similarly,
when P is in area A, although p
position
(P,E) remains
the original value, the possibility p
position
(P,E') is
reduced. If P is in any other area, both possibilities
will stay in original status.
3.3 Motion Information
In the video sequence, two hands will keep moving
all the time. This not only makes the hand position
change, but also makes the hand size change. In our
system, Kalman filters are applied to estimate and
TEPD
TEPDEPD
EPD
EPp
position
),(0
),(1),(
1),(1
),(
2
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
408

predict the location and also the size of the hand. To
model the motion of hand position, we assume that
the movement of the hand would be sufficiently
small during step interval ΔT. A dynamic process
could be used to describe the x and y coordinate at
the center of the hand on the image plane with state
vectors V (represents either X or Y) which includes
the position and velocity of each coordinate. The
dynamic process is defined as
kkk
w
T
T
V
T
V
2/
10
1
2
1
(12)
The system noise is modeled by w
k
, an unknown
scalar acceleration, whose statistical characteristics
are Gaussian and white. Therefore, an observation
model can be given by
vHVz
kk
11
(13)
Where V
k+1
is the actual state vector at time k+1,
v is measurement noise, and z
k+1
is the central
location of the hand model at time k+1.
A similar Kalman filter model is applied to hand
size. The length of two axis a and b is also predicted
at beginning of each frame.
The motion information is used to select most
probably hand status with location result of previous
frames.
3.4 Possibility Support Map
Combining these three aspects of information, the
PSM with the same size of the frame is generated.
For every object, a channel is constructed. The value
at position (x,y) is the possibility (denoted as p(P,E))
that pixel P(x
p
,y
p
) with color C(x
p
,y
p
) supports the
corresponding hand model E(x
e
,y
e
,a
e
,b
e
,θ
e
). There
are three steps to calculate p(P,E).
Firstly, we get predicted hand model by motion
information as soon as a new image frame is
acquired, where the procedure proposed in last
subsection is carried out.
The next step is to calculate position likelihood
for pixel P. Using equation 11 and considering the
reduction effect produced by other hand, p
position
(P,E)
is gained.
The last step is to calculate color likelihood for
pixel P. p
color
(P) is determined by p(skin|C) which is
calculated by equation 1.
Finally, support possibility of pixel P for model
E is defined as
)(),(),( PpEPpEPp
colorposition
(14)
(a) (b)
Figure 3: These two images show the possibility support
map. (a) shows that the brightness of a color indicates the
possibility difference of corresponding model. (b) shows
that two models overlap.
Figure 3 shows the PSM of three channels. The
blue color represents for head channel, red for left
hand and green for right hand. The brighter the color
is, the higher the possibility is in the corresponding
channel. As we can see in Figure 3b, when two
hands contact, some pixels are shown in yellow,
which means the pixel probably belongs to two
hands at the same time.
4 HAND TRACKING ON
POSSIBILITY SUPPORT MAP
As soon as the PSM for current frame is generated, a
two-step tracking procedure is applied on each
channel of PSM to achieve actual hand/head
location.
In the first step, we assume that the size and
orientation of the ellipse model will not change.
Therefore only the position of the ellipse model
moves. Based on the assumption, a mean-shift like
algorithm is applied, where search window is
replaced by our ellipse model.
1) Choose the initial location of the model E.
2) Calculate the center by following equation.
1)),,((
),(
EyxD
ji
ij
yxpyxM
(15)
00010010
/';/' MMyMMx
(16)
3) Set the center of the ellipse model E at (x',y').
4) Repeat steps 2 and 3 until convergence (x' and
y' move less than a preset threshold).
In the second step, we fix the center of ellipse
model and try to find best fit size and orientation
parameter for the model. A circle window Q is then
constructed, which center is at (x
e
,y
e
) and radius is
10% longer than the length of longer axis of E
(namely a). Within this window, proper parameters
are calculated by equations 17 and 18.
REAL-TIME HAND LOCATING BY MONOCULAR VISION
409
)
''
'2
arctan(
2
1
0220
11
(17)
2
)''('4
2
''
0220
2
11
0220
axis
(18)
''/'
'/'
'/'
001111
2
000202
2
002020
yxMM
yMM
xMM
(19)
Figure 4: Tracking two objects simultaneously with two-
step tracking procedure, which firstly locates position of
ellipse and secondly refines size and orientation
parameter.
Figure 4 shows the iteration procedure, where
blue ellipse stands for head object and green ellipse
represents left hand. As left hand moves toward
right, it takes 8 iterations to fit the new position. We
can see that the new size which is calculated then is
larger than the original and the orientation hardly
changes.
At the end of locating hands position of current
frame, the update process would be carried out.
Equations 5~7 are used to update color information
and meanwhile correction procedure is applied for
Kalman filter with newly located hand status (center
position and size).
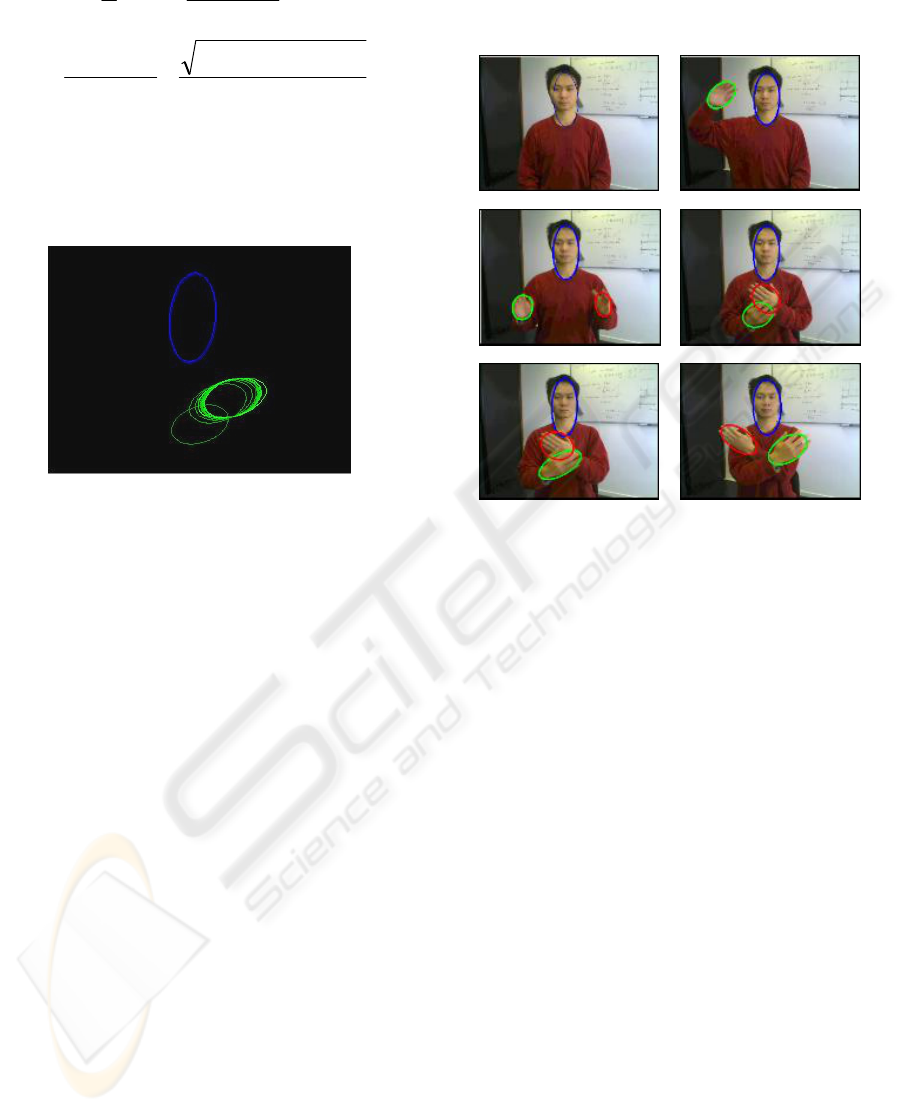
5 EXPERIMENT RESULT
Our prototype system works at 10~14 frames per
second on a laptop with 2.1GB Hz Duo CPU and
2.0GB RAM under 320*240 image resolution. The
speed would be faster after code optimization on a
better hardware for practical system. It is been tested
that with smaller image resolution the fps will be
rapidly increased however the accuracy will be
decreased significantly.
The user is sitting in front of the screen on which
the camera is placed. The working environment is
under normal office illumination conditions.
One object Two objects
Three objects Occlusion start
Occlusion Occlusion end
Figure 5: Result of hand locating with and without hand
occlusion.
Figure 5 shows the hands tracking result of a
video sequence. Head is represented as blue ellipse
and two hands are respectively represented as red
and green ellipses. We can see that our tracking
approach works well when hands are moving in and
out of frame.
When one hand is close to the other one (or
head), the approach distinguishes the two objects
correctly. Even when one hand is covering the other
one, we can still obtain efficient result. Figure 6
shows the result of our method and normal camshift
tracking algorithm (provided in OpenCV) at the
same time.
As the result shown in Figure 6, the Camshift
algorithm tracks effectively when hands are isolated
respectively, but when the two hands get close, their
models are badly influenced by each other (Frame
309) and even collapse into one model (Frame 369).
Our method tracks different hand in their own PSM
channel. Although these PSM channels are
generated from the same video frame, they are
carrying different information due to their model
parameter and the relationship between themself.
Our proposed method tracks well when two hands
overlaps even when two hands are in front of the
face at the same time Nevertheless, as some part of
the hand is covered by other one, its size while
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
410

unavoidably may slightly differ from actual size due
to its 'invisibility'.
No. Camshift algorithm Proposed method
299
306
307
309
359
363
365
369
Figure 6: Comparison between locating result of
proposed method (on the right column) and tracking
result of Camshift algorithm (on the left column).
Camshift will track the wrong object or track two object
as a whole, while our proposed method can separately
locate tracked objects.
The learning rate r mentioned in Equation 5 to 7
will impact on final result when illumination
changes. On extreme situation where r equals zero, it
means no adaptive update process is carried out:
fixed parameters will be used. Thus chaos occurs
due to p(C|skin) never changes when light condition
changes. On the other hand, r should not be to large.
On another extreme situation where r equals 1, it
means no previous information is used. Thus the
color information process will not be stable, any
light noise will lead the update to failure. For normal
office illumination condition, r is set to 0.05. And r
should be adjust to better value on various
illumination conditions.
6 CONCLUSIONS
In this work, we have proposed a robust real-time
hands tracking system based on monocular vision by
generating possibility support map from hand color
information, position information and motion
information. For the locating procedure, the system
applied a two-stage search algorithm which adapts
both the center position change and size change. The
current prototype system can process the image up
to 10 to 14 frames per second, furthermore the
system can provide precise hand status, including
position, size and orientation, even if hand occlusion
happens. Our next step is to integrate this hand
locating method into HCI application which allows
user to drive his avatar in remote collaborative
virtual environment.
REFERENCES
Tamura, S., Kawasaki, S., 1988. Recognition of Sign-
language Motion Images. Pattern Recognition, 21:343-
353.
Starner, T., Pentland, A., 1995. Real-time American Sign
Language Recognition from Video using Hidden
Markov Models. In Proc. International Symposium on
Computer Vision, pp. 265-270.
Hasanuzzaman, M. et al., 2004. Real-time Vision-based
Gesture Recognition for human robot interaction. In
IEEE International Conference on Robotics and
Biomimetics, pp. 413-418.
Han, J. et al., 2006. Automatic Skin Segmentation for
Gesture Recognition Combining Region and Support
Vector Machine Active Learning. In International
Conference on Automatic Face and Gesture
Recognition, pp. 237-242.
Lee, M. W., Cohen, I., 2004. Human Upper Body Pose
Estimation in Static Images. In European Conference
REAL-TIME HAND LOCATING BY MONOCULAR VISION
411

on Computer Vision, pp. 126-138.
Askar, S. et al., 2004. Vision-based Skin-colour
Segmentation of Moving Hands for Real-time
Applications. In European Conference on Visual
Media Production, pp. 79-85.
Comaniciu, D., Ramesh, V., 2000. Mean Shift and
Optimal Prediction for Efficient Object Tracking. In
International Conference on Image Processing, pp.
70-73.
Bradski, G. R., 1998. Computer Vision Face Tracking for
Use in a Perceptual User Interface. Intel Technology
Journal 2:12-21.
Vacavant, A., Chateau, T., 2005. Realtime Head and
Hands Tracking by Monocular Vision. In IEEE
International Conference on Image Processing, pp. II-
302-5.
Schreer, A. et al., 2005. Real-time Avatar Animation
Steered by Live Body Motion. In International
Conference on Image Analysis and Processing, pp.
147-154.
Kirubarajan, T., Bar-Shalom Y., 2001. Combined
Segmentation and Tracking of Overlapping Objects
with Feedback. In IEEE Workshop on Multi-Object
Tracking, pp. 77-84.
Coogan, T. et al., 2006. Real Time Hand Gesture
Recognition Including Hand Segmentation and
Tracking. In International Symposium on Computer
Vision, pp. 495-504.
Imagawa, K. et al., 1998. Real-time Tracking of Human
Hands from a Sign Language Image Sequence. In
Asian Conference on Computer Vision, pp. 698-705.
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
412
