
3D VOLUME DATA SEGMENTATION
FROM SUPERQUADRIC TENSOR ANALYSIS
Sang Min Yoon and Arjan Kuijper
GRIS TU Darmstadt, Fraunhofer IGD & TU Darmstadt
Fraunhoferstrasse 5, Darmstadt, 64283, Germany
Keywords:
3D Model segmentation, Ellipsoidal representation, Diffusion tensor fields based similarity measure.
Abstract:
The segmentation of 3D target objects into coherent subregions is one of the most important issues in computer
graphics as it is applied in many applications, such as medical model visualization and analysis, 3D model
retrieval and recognition, skeleton extraction, and collision detection. The goal of 3D segmentation is to
separate the volume or mesh data into several subregions which have similar characteristics.
In this paper, we present an efficient and accurate 3D model segmentation methodology by merging and
splitting the subregions in a 3D model. Our innovative 3D model segmentation system consists of two steps:
i) the ellipsoidal decomposition of unorganized 3D object using properties of three dimensional second-order
diffusion tensor fields, and ii) The iteratively merging and splitting of subregions of the 3D model by measuring
the similarity between neighboring regions. Experimental results are conducted to evaluate the performance
of our methodology using 3D models from well-known databases and 3D target objects that are reconstructed
from image sequences.
1 INTRODUCTION
In the worlds of computer graphics, several mature
methods for an automatic 3D visualization and anal-
ysis of real objects have been heavily studied. In par-
ticular, the segmentation of 3D target objects into co-
herent sub-regions has received many concerns in last
few years because it is very useful in many applica-
tions, such as medical volume rendering and analy-
sis, 3D shape retrieval and action recognition, skele-
ton extraction, and collision detection. The goal of
3D model segmentation is to separate the 3D data into
mutually exclusive homogeneous subregions of inter-
est.
Nevertheless, there is no standard formal defini-
tion of exact 3D model segmentation. Subdivided re-
gions using segmentation methodologies are different
according to their features and clustering techniques.
Recently, Chen et al. (Chen et al., 2009) tried to com-
pare the difference of the automatically segmented 3D
models and human-visual perception based segmenta-
tion. For efficient segmentation of 3D volume data,
extraction of robust features and a similarity mea-
sure between separated neighbor regions are needed.
Previous research to segment 3D meshes which are
composed with numerous triangles (Lien et al., 2006;
Figure 1: Flowchart of our proposed 3D object segmenta-
tion using the characteristics of the 3D ellipsoidal model.
Tierny et al., 2008) focused on their effort for novel
clustering techniques in the the space of scalar or vec-
tor fields.
In this paper, we present a 3D model segmenta-
tion methodology using an ellipsoidal representation
of the 3D model in the space of diffusion tensor fields.
Using the properties of diffusion tensor fields, we it-
eratively merge and split the subregions of 3D target
objects. The eigen-features which come from diffu-
sion tensor fields are used to measure the similarity
between neighbor subregions. Figure 1 shows the to-
tal flowchart which we will explain in the paper using
72
Min Yoon S. and Kuijper A. (2010).
3D VOLUME DATA SEGMENTATION FROM SUPERQUADRIC TENSOR ANALYSIS.
In Proceedings of the International Conference on Computer Graphics Theory and Applications, pages 72-77
DOI: 10.5220/0002818800720077
Copyright
c
SciTePress

the example 3D volume data.
Our main contributions are (1) the 3D ellipsoidal
representation of the 3D volume/mesh model using
the properties of diffusion tensor fields, (2) the itera-
tive merging and splitting the neighboring regions by
measuring the similarity of characteristics of diffusion
tensorial features, and (3) the efficient and robust 3D
segmentation for diverse models or reconstructed ob-
jects from multiple images without any constraints,
prior knowledge, or assumptions on the 3D model.
2 PREVIOUS WORK
Our methodology has been motivated by the concept
of superquadric representation of 3D models, 3D dif-
fusion tensor fields and its applications, and 3D seg-
mentation techniques. In this section, we survey the
previous work which contributed significantly to the
innovation within this area.
2.1 Superquadric Representation
The representation of a 3D model using superquadrics
is used for visualizing its characteristics with only
very few parameters cylinders, geons, superquadrics,
etc. Superquadrics are a family of geometric solids,
which can be interpreted as a generalized of basic
quadric surfaces and solids. With only a few parame-
ters, they can represent a large variety of standard ge-
ometric solids and smooth shapes. Superquadrics are
also very efficient for representing three dimensional
surface data. In contrast to a mesh representation of
an object with thousands of triangles, the same ob-
ject can be represented by a small set of superquadrics
which are uniquely defined by 11 parameters per each
voxel (Zhang et al., 2003).
2.2 Diffusion Tensor Fields
Most 3D volume segmentation and visualization
methodologies are based on vector fields which are
generated from a given image by different physical
properties. Few works have investigated the extrac-
tion of features within resulting tensor fields. Basser
et al. (Basser et al., 1994) presented their seminar
work on diffusion tensor magnetic resonance imaging
(DT-MRI). Using this new MRI modality, it was pos-
sible to qualify anisotropic properties of an imaged
tissue by characterizing the water diffusion. In partic-
ular, Kindlmann (Kindlmann, 2004) presented a ten-
sor based superquadric visualization method by map-
ping the tensor eigenvalues and eigenvectors to the
orientation and shape of geometric primitives.
2.3 3D Model Segmentation
Segmentation techniques can be separated into
classes in many ways according to different classifi-
cation schemes, Shamir (Sharmir, 2006) surveyed the
previously 3D segmentation of 3D volumes and sep-
arated the 3D segmentation problem into two types:
as surface-type and part-type segmentation. Surface-
type based segmentation is based on the decompo-
sition of geometric primitives such as planes, cylin-
drical patches, and spherical parts (Wu and Levine,
2005; Attene et al., 2000). The part-type segmenta-
tion decomposes a 3D object into sub-meshes by seg-
menting a surface into connected components (Lien et
al., 2006; Tierny et al., 2008). The segmentation al-
gorithms used various approximating solutions such
as K-means (Shlafman et al., 2002), region growing
(Chazelle et al., 1997), hierarchical clustering (Gar-
land et al., 2001; Inoue et al., 2001), graph-cuts (Katz
and Tal, 2003), iterative clustering (Chevalier et al.,
2003), and spectral analysis (Liu and Zhang, 2004).
3 SUPERQUADRIC
DECOMPOSITION USING
TENSORIAL FEATURES OF 3D
MODEL
Previous 3D segmentation techniques are mainly
based on mesh/triangle based 3D models in the space
of vector or scalar transformations, because similarity
measures within these spaces relate to the perception
of the human eye. Nevertheless, tensorial maps con-
tain and provide more information than scalar ones as
to measure the similarity between neighbor regions.
In this section, we decompose the 3D mesh mod-
els into 3D ellipsoidal models using the properties of
three dimensional second-order symmetric diffusion
tensor fields.
A tensor is the mathematical identification of a ge-
ometric or physical quantity whose analytic descrip-
tion consists of an array of numbers. The tensor field
commonly defined as a topological representation of
a 3D symmetric, second-order symmetric tensor field
is shown as (Delarcelle and Hesselink, 1994):
T =
T
xx
T
xy
T
xz
T
yx
T
yy
T
yz
T
zx
T
zy
T
zz
, (1)
where T
xy
= T
yx
, T
xz
= T
zx
, and T
yz
= T
zy
since the or-
der of differentiation is free, so that the tensor is a
symmetric positive definite matrix. This matrix can
3D VOLUME DATA SEGMENTATION FROM SUPERQUADRIC TENSOR ANALYSIS
73

(a) 3D ellipsoidal representation of each voxel using the extracted eigenvalues and eigenvectors. (b) The
superquadric tensor visualization as the change of the eigenvalues’ values, giving rise to differently oriented
ellipsoids.
Figure 2: The superquadric representation uses the eigenvalues and eigenvectors of the diffusion tensor fields which determine
the scale and orientation of the superquadric model.
be reduced to principal axes by solving the character-
istic equation
(T − λ
i
· I)e
i
= 0, (2)
where I is the identity matrix, λ
i
are the eigenvalues
of the tensor and e
i
are the orthonormal eigenvectors
(i = 1, . . . , 3). In this case, the tensor in each pixel can
be represented by an ellipsoid, where the main axis
lengths are proportional to the ordered eigenvalues λ
i
(λ
1
≥ λ
2
≥ λ
3
> 0).
The evaluation of the tensor ellipsoidal geomet-
rics and their properties is facilitated by an intuitive
domain that spans all possible tensor shapes. Such a
domain is afforded by the geometric anisotropy met-
rics of Kindlmann (Kindlmann, 2004). Given the
non-negative tensor eigenvalues λ
1
, λ
2
, λ
3
, the metrics
quantifying the certainty with which a tensor is said to
have a given shape are given by:
c
l
=
λ
1
−λ
2
λ
1
+λ
2
+λ
3
, c
p
=
2(λ
2
−λ
3
)
λ
1
+λ
2
+λ
3
, c
s
=
3λ
3
λ
1
+λ
2
+λ
3
.
The three metrics add up to unity, and define a
barycentric parameterization of a triangular domain,
with the extremes of linear, planar, and spherical
shapes at the three corners. The barycentric shape
space has been used as the domain of transfer func-
tions for direct volume rendering of diffusion ten-
sors, and as an intuitive basis of comparison be-
tween various anisotropy metrics. Figure 2 is a con-
ceptual representation of volume data showing how
the superquadric models can be represented with ex-
tracted eigenvalues and eigenvectors. The ratio be-
tween eigenvalues determines the shape of the su-
perquadrics, their sum defines their scale and its prin-
cipal eigenvector direction defines the rotation of the
superquadrics as shown in Figure 2b. Using the ba-
sic principal direction of the superquadric represen-
tation method, we can visualize the 3D volume data
Figure 3: The superquadric representation of 3D volume
data such as ”tool” and ”horse” using our proposed method.
Figure 4: The process of segmenting the 3D target object
using our proposed merging and splitting methodology. The
unorganized 3D model is divided by its characteristics of
tensorial features.
into superquadrics. Figure 3 shows some examples of
3D models such as ”horse” and ”tool” and zooms in
to see the detailed shape and orientation of each su-
perquadric model.
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
74

Figure 5: Some examples of 3D model segmentation using
our approach using 3D models from the Princeton 3D model
dataset.
(a) Imported 3D volume data (b) Segmentation using
our proposed method (c) Detail of the hair tail.
Figure 6: 3D model segmentation using our proposed
methodology. Even though the hair tail is a small region,
its superquadric characteristics are not similar to the neigh-
boring regions and are therefore not merged with the neigh-
bors.
4 ITERATIVE SEGMENTATION
OF 3D MODEL
Various methods have been proposed to solve the
problems of separating and clustering subregions of
the 3D target object. In this section, we present the
separation the unlabeled 3D model into segmented
subregions using properties of the eigen-features. The
degree of anisotropy of the ellipsoidal 3D model
can be quantified in a single number called diffusion
anisotropy index, or fractional anisotropy (FA), and
is defined as follows:
FA =
s
3[(λ
1
− λ
avg
)
2
+ (λ
2
− λ
avg
)
2
+ (λ
1
− λ
avg
)
2
]
2(λ
2
1
+ λ
2
2
+ λ
2
3
)
,
(3)
where λ
avg
is the average of λ
1
, λ
2
, and λ
3
. The
FA is used as feature to measure the similarity of
neighbor voxels to segment the 3D model.
The 3D model segmentation procedure is as follows:
STEP0 : Initially, the numbers of subregions
of the human body model is equal to the num-
ber of voxels of the 3D human model. Calculate
FA
i j
=
p
(FV
i
− FV
j
) × (FV
i
− FV
j
), where FV
i
and
FV
i
are FA of voxel i and j, respectively.
STEP1 : Progressively merge the neighbor
voxels if FA
i j
is less than threshold and recal-
culate the average FA of the merged subregions,
FA
sub
=
1
n
∑
n
k=1
FA
k
, where the merged subregion
which have n voxels. The voxels i and j are splitted
if FA
i j
exceeds the threshold.
STEP2 : Repeat STEP1 until there are no subre-
gions whose the FA
sub
is less than threshold.
5 EXPERIMENTS
We implemented our proposed 3D segmentation
methodology using the superquadric features in the
space of diffusion tensor fields and conducted exper-
iments on a standard PC with a Pentium 4 1.2 GHz
CPU. First, we have tested our methodology using
the Princeton 3D model database. They provided
the 3D models in Object File Format (OFF) with a
polygonal geometry of the model. We have con-
verted the objects to a voxel based model which has
a 128x128x128 voxel size. Figure 5 shows some ex-
amples, such as an animal, a tool, and a guitar. We
displayed the segmented regions with various colors.
Figure 6 shows a Princeton database example in more
detail. As shown in Figure 6(d), a small subregion
is correctly segmented from the neighboring regions
because its tensorial characteristics are very different
from the neighbor regions.
We also tested our algorithms on 3D reconstructed
objects obtained from multiple images. The images
came from the HumanEva database. We first recon-
structed the target object from multiple images by
image based visual hulls using provided camera cal-
ibration data and statistics of background modeling
with 128x128x128 voxel size volumes. We adapted
our method to the 3D reconstructed model as shown
in Figure 7. Using the extracted silhouette of fore-
3D VOLUME DATA SEGMENTATION FROM SUPERQUADRIC TENSOR ANALYSIS
75
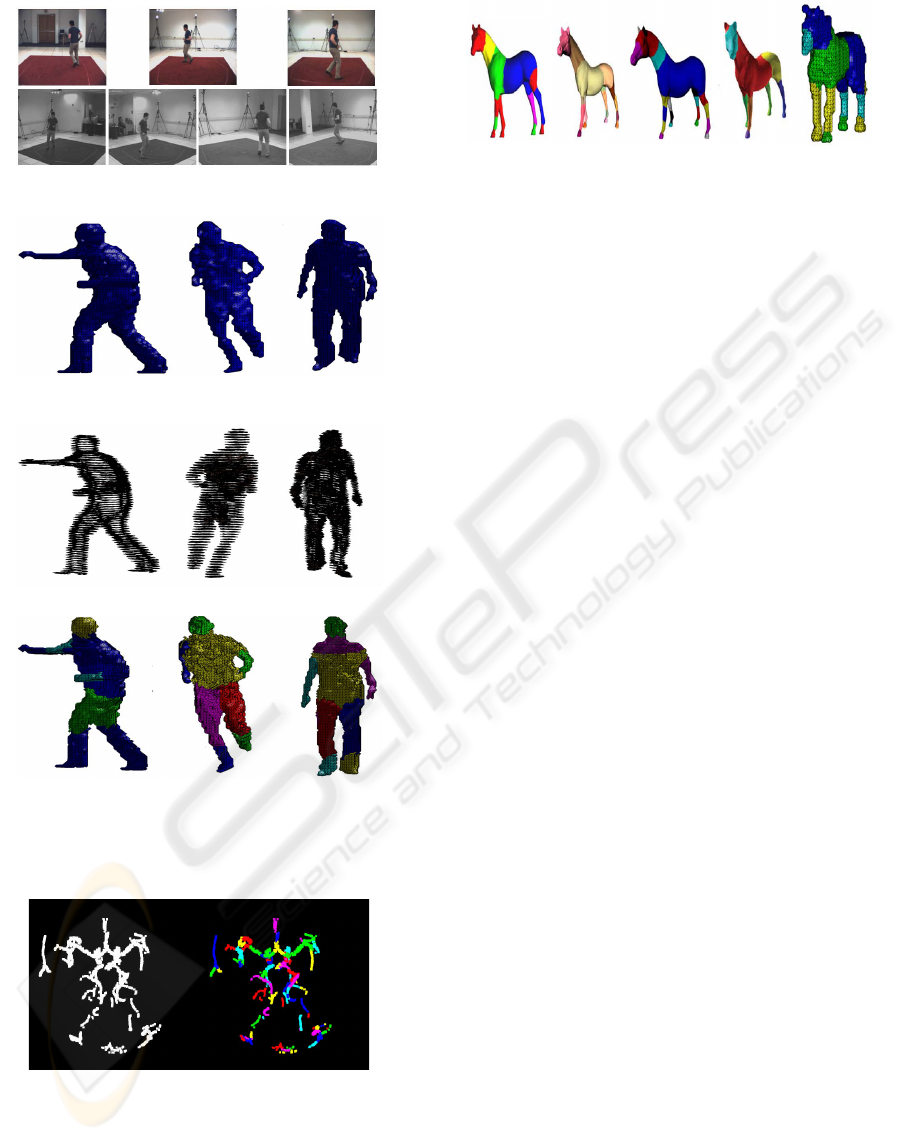
(a) Input images of multiple cameras from the
HumanEva dataset.
(b) 3D reconstructed object from the HumanEva
dataset.
(c) 3D ellipsoidal representation of the target objects.
(d) 3D segmentation into distinct parts using our
proposed approach.
Figure 7: 3D model segmentation by using 3D reconstruc-
tion from multiple images.
(a) Unlabeled 3D human brain volume data whose
resolution is 512x512x512. (b) Segmented human
brain volume data by using our approach.
Figure 8: Medical volume segmentation and rendering.
ground and camera calibration information, we recon-
structed the target object using Image-Based Visual
Hull (IBVH) (Matusik et al., 2000).
(a) 3D segmentation of Zhang et al., (b) 3D
segmentation of Lien et al., (c) 3D segmentation of
Tierny et al., (d) consistent segmentation, (e) our
proposed 3D segmentation using iterative merging
and splitting.
Figure 9: Some examples of 3D model segmentation us-
ing our approach from the 3D models from Princeton’ 3D
model dataset.
Our 3D model segmentation technique also ap-
plied to medical volume understanding and analysis
area. Figure 8 shows the segmented human brain vol-
ume data using our approach. Figure 8a is the unla-
beled 3D MRI data whose resolution is 512x512x512.
We can segment the 3D medical volume data into sev-
eral subregions which have similar tensorial charac-
teristic. Our approach does not require priori infor-
mation to segment the 3D volume data, we can apply
to various target objects which have high-degree of
freedom.
We compared our methodology to several other ap-
proaches, see for example Figure 9. It contains the
approaches by Zhang et al. (Zhang et al., 2003) in
Figure 9a, Lien et al. (Lien et al., 2006) in Figure 9b,
Tierny et al. (Tierny et al., 2008) in Figure 9c, and the
consistent segmentation in Figure 9d. The 3D “horse”
model is commonly divided into a main body part, 4
legs, a neck, and a head. Especially the 3D segmen-
tation of Tierny et al. (Tierny et al., 2008) has many
subregions. Note that the intention of our approach is
not to specific segment the target object as shown in
Figure 8, but a generating distinct subregions. Subre-
gions are divided into smaller region if their tensorial
characteristics are very different to the neighborhood
as shown in Figure 6. Previous approaches are based
on the 3D mesh models which are composed of nu-
merous triangles, but our 3D models are only based
128x128x128 voxel sized volumes. Our results can
be used to define the subregions in the smooth trian-
gulated versions.
6 CONCLUSIONS AND FUTURE
WORK
In this paper, we presented a 3D volume segmenta-
tion methodology using tensorial properties of dif-
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
76

fusion tensor field. The superquadric model using
the properties of the 3D second-order diffusion tensor
fields efficiently visualize the characteristics of the 3D
model using only few parameters. We cluster the 3D
volume data by iteratively merging and splitting the
neighboring regions using the similarity measure of
tensorial features.
Experiments of 3D segmentations of the imported
3D models and 3D reconstructed objects from multi-
ple image sequences, we show that our proposed sys-
tem is very efficient and robust in separating the 3D
volume data into several subregions which have sim-
ilar tensorial characteristics. Our 3D model segmen-
tation is very useful in 3D deformable object motion
analysis and medical volume visualization.
This methodology provides a basis for the seg-
mentation and tracking of deformable object seg-
ments. Hence, our future work will focus on consis-
tent 3D model segmentation optimized for speed and
performance as soon as qualitative benchmarks can
be given. The exploitation of additional semantics
together with our methodology could lead to a fast
3D segmentation approach. Vice versa, the derivation
of semantical metadata for subregions of a 3D object
will also be addressed in future work.
REFERENCES
Attene, M., Falcidieno, B., Spagnuolo, M., 2000. Hierar-
chical mesh segmentation bsed on fitting primitives.
The Visual Computer.
Basser, P. J., Mattiello, J., and Le Bihan, D., 1994. MR
diffusion tensor spectroscopy and imaging. Biophys
Journal.
Chazelle, B., Dobkin, D., Shourhura, N., and Tal, A., 1997.
Strategies for polyhedral surface decomposition: An
experimental study. Computational Geometry: The-
ory and Applications.
Chevalier, L., Jaillet, F., and Baskurt, A., 2003. Segmenta-
tion and superqadric modeling of 3D object WSCG.
Chen, X., Golovinskiy, A., and Funkhouser, T., 2009. A
Benchmark for 3D Mesh Segmentation SIGGRAPH.
Delarcelle, T., and Hesselink, L., 1994. The topology of
symmetric, second-order tensor fields. In proceeding
of IEEE Visualization.
Golovinskiy, A., and Funkhouser, T., 2009. Consistent Seg-
mentation of 3D Models. Computer and Graphics.
Garland, M., Willmott, A., and Heckbert, P., 2001. Hierar-
chical face clusterig on polygonal surfaces. In ACM
Symposium on Interactive 3D Graphics.
Inoue, K., Takayuki, I., Atsushi, Y., Tomotake, F., and
Kenji, S., 2001. Face clustering of a large-scale card
model for surface mesh generation. Computer-Aided
Design.
Kindlmann, G., 2004. Superquadric tensor Glyph. Joint
Eurographics- IEEE TCGV Symposium on Visualiza-
tion.
Katz, S., and Tal, A., 2003. Hierarchical mesh decomposi-
tion using fuzzy clustering and cuts. In SIGGRAPH.
Lange, K., and Carson, R., 1984. EM reconstruction al-
gorithms for emission and transmission tomography.
Journal of Computer Assisted Tomography.
Leonardis, A., Jaklic, A., and Solina, F., 1997. Su-
perquadrics for segmenting and modeling range data.
IEEE trans. on PAMI.
Lien, J.-M., Keyser, J., and Amato, N. M., 2006 Simul-
tanious shape decomposition and skeletonization. In
proceeding of ACM Symposium on Solid and Physical
Modeling.
Liu, R., Zhang, H., 2004. Segmentation of 3D meshes
through spectral clustering. In proceeding of Pacific
Conference on Computer Graphics and Applications.
Matusik, M., Buehler, C., Raskar, R., Gortler, S. J., and
Mcmillan, L., 2000. Image-based visual hulls t. SIG-
GRAPH.
Moller, T., 1997. A fast triangle-triangle intersection test.
Journal of Graphics Tools.
Sharmir, A., 2006. Segmentation and Shape Extraction of
3D Boundary Meshes. In proceeding of Eurographcs,
State of The Art Report.
Shlafman, S., Tal, A., and Katz, S., 2002. Metamorphosis
of polyhedral surfaces using decomposition. In pro-
ceeding of Eurographics.
Tierny, J., Vandeborre, J.-P., and Daoudi, M., 2008. Fast and
precise kinematic skeleton extraction of 3D dynamic
meshes. In proceeding of CVPR.
Wu, J., Levine, M., 2005. Structure recovery via hybrid
variational surface approximation. In proceeding of
Eurographics.
Zhang, Y., Koschan, A., and Abidi, M., 2003. Su-
perquadrics based 3D object representation of auto-
motive parts utilizing part decomposition. In proceed-
ing of International Conference on Qaulity control by
Artifical Vision.
3D VOLUME DATA SEGMENTATION FROM SUPERQUADRIC TENSOR ANALYSIS
77
