
MULTI-RESOLUTION APPROACH
FOR FINE STRUCTURE EXTRACTION
Application and Validation on Road Images
Nicolas Coudray, Argyro Karathanou
Laboratoire MIPS, Université de Haute-Alsace, Mulhouse, France
Sylvie Chambon
Laboratoire Central des Ponts et Chaussées, LCPC, Nantes, France
Keywords:
Segmentation, Multi-resolution, Road images, Cracks.
Abstract:
In the context of fine structure extraction, this paper presents a new method based on multi-resolution segmen-
tation applied for the detection of road cracks. A method already developed to detected low-contrasted bio-
logical membranes has been adapted to detect cracks on images: crack features are defined as heterogeneities
rather than transitions of closed regions characterizing the membranes. This new methodology is quantita-
tively validated on reference segmentations and compared to an adapted filtering and Markovian modelling
algorithm.
1 INTRODUCTION
Detecting fine structures is very helpful in a lot of do-
mains: to extract ceramic damages (Elbehiery et al.,
2005), to find cracks in underground pipes (Iyer and
Sinha, 2005), to detect road network in satellite im-
ages (Geman and Jedynak, 1996), to follow vessels
in medical images (Frangi et al., 1998). Since 1990, a
lot of algorithms have been proposed in the domain of
crack detection on road pavement surface. In fact, ev-
ery country needs to evaluate, periodically, the qual-
ity of roads and most of this work is done manually,
which is expensive, non reproducible, dangerous and
not very efficient. In consequence, a lot of efforts
have been made in the field of research on automatic
or semi-automatic procedures for detecting deteriora-
tion on the roads and, in particular detecting cracks.
In 2003, the report of Schmidt (Schmidt, 2003) gives
a good summary of the technologies developed in this
field. The main difficulty of this task is that the de-
fault is not well contrasted compared to the texture of
the road, and that it represents a very small part of the
images (about 1.5% of the image).
The most recent algorithms proposed to tackle
this problematic are based on multi-resolution ap-
proaches. Even if they are the most efficient, they
have shown their limits by giving a sparse detection.
In the field of detection of biological membranes,
recent methods based on multi-resolution watershed
segmentation provided great performances, even if
the objects of interest are low-contrasted (Coudray
et al., 2007). By analogy, the problem of biolog-
ical membranes detection is similar to crack detec-
tion. The goal of this paper is to adapt this watershed
method to road crack detection, and compare its per-
formances with a Markovian modeling-based algo-
rithm developed specifically for this purpose (Cham-
bon et al., 2010).
Firstly, a brief state of the art of fine structure ex-
traction is exposed. Secondly, the studied crack algo-
rithms are presented: the Markovian modeling algo-
rithm and the multi-resolution segmentation. Thirdly,
the protocol used to analyze the performances is
given. And finally, before concluding, results are
summarized and discussed.
2 FINE STRUCTURE
EXTRACTION
We distinguish four methods: those based on a
Threshold (Koutsopoulos and Downey, 1993), meth-
ods combining a threshold with mathematical mor-
142
Coudray N., Karathanou A. and Chambon S. (2010).
MULTI-RESOLUTION APPROACH FOR FINE STRUCTURE EXTRACTION - Application and Validation on Road Images.
In Proceedings of the International Conference on Computer Vision Theory and Applications, pages 142-147
DOI: 10.5220/0002822801420147
Copyright
c
SciTePress

phology tools (Morphology) (Tanaka and Uematsu,
1998), Neural network-based methods (Bray et al.,
2006), and Multi-scale filtering (Subirats et al., 2006).
A detailed state of the art can be found in (Chambon
et al., 2010).
Threshold methods are popular and simple but in-
efficient (the amount of false positives and of false
negatives is important). Methods based on Morphol-
ogy reduce the number of false positives but they
are strongly dependent on the choice of the parame-
ters. Neural network techniques are efficient but they
need a learning step that is quite expensive and non-
automatic. Finally, Multi-scale methods seem to be
the most efficient: unlike other methods, they lead to
less false positives, but more false negatives. In con-
clusion, we can use methods that detect most of the
crack but give a lot of errors or methods that obtain
only a part of the crack with low errors.
In the field of microscopy images, a watershed
segmentation has been proposed to extract biological
membranes (Coudray et al., 2007). The problem of
this task is comparable to the problem of road crack
detection: edges of the membranes (here the default)
are low and heterogeneously contrasted compared to
the background (the road). Consequently, we propose
to adapt this method to the road application.
3 CRACK DETECTION
ALGORITHMS
In this part, we briefly present a recent crack detection
algorithm based on an adapted filter combined with
Markovian modeling segmentation and, then, we in-
troduce a new method, based on multi-scale analysis
with watershed and we describe all the contributions
in order to adapt this method to a road crack detection.
3.1 Adapted Filtering and Markovian
Modeling (AFMM)
The method proposed in (Chambon et al., 2010) uses
these two hypotheses, well known in the field of road
crack detection:
(H
1
) Pixels of a crack are darker than the back-
ground (the road);
(H
2
) A crack is a set of connected segments with dif-
ferent orientations.
Consequently, the principle of the method is, first, to
binarize the image (by adapted filtering) and, second,
to refine the binarization by a segmentation based on
Markovian modeling. At the beginning, we have to
choose the number of scales, which depends on the
resolution of the image (the size of the pixels): if we
suppose that we have 1 mm/pixel, 5 scales are suf-
ficient (we can detect cracks from 2 mm to 1 cm).
Then, we also have to choose the number of directions
for the adapted filtering and, considering the aspect of
the road cracks, it is realistic to use these directions:
[0,
π
4
,
π
2
,
3π
4
]. Interested readers can find more details
about this work in (Chambon et al., 2010). The goal
of this paper is to compare this method with the new
one presented below.
3.2 Multi-Resolution Detection of
Heterogeneities (MRDH)
This method is inspired from the 3-step segmen-
tation method developed for the segmentation of
low and heterogeneously contrasted biological mem-
branes (Coudray et al., 2007). The aim was to par-
tition the image by detecting the closed contours of
membranes. In this initial algorithm, the edges are
firstly thresholded at different scales, and, secondly,
the resulting binary images are combined in a Re-
constructed Gradient-Like (RGL) image. Finally, the
watershed algorithm is applied on the RGL image
to obtain the searched partition. For the cracks, the
third step has been adapted and a fourth step has been
added to discard spurious detections. The steps are
detailed below.
A multi-resolution transform is first applied to the
initial image I(x, y, 1) using a pyramidal transform:
images I(x, y, s) are obtained at scale s using:
I(x, y, s) =
+k
∑
m=−k
+k
∑
n=−k
G(m, n, s)I(sx+m, sy+ n, 1), (1)
where G(m, n, s) is the smoothing average filter.
Dyadic pyramids reduce the size of the image by a
factor of 2 between each scale. Here, non-dyadic
pyramids are used to better represent and identify the
features, with s ∈ V
s
= {1, 2, . . . , 10} (at scales coarser
than 10, the images become too small to be analyzed).
Heterogeneities are detected and thresholded at each
scale, leading to binary images B(x, y, s). In this study,
features to be identified, i.e. the cracks, are better de-
scribed as local heterogeneities than local transitions
(e.g. Figure 1), making a local standard deviation fil-
ter more appropriate than a gradient filter like Sobel,
for instance.
In the next step, binary images are combined to
form the RGL image I
RGL
(x, y):
I
RGL
(x, y) = max
s∈V
s
((11− s) × B(x, y, s)). (2)
With the (11 − s) weighting, the gray-level on the
RGL image corresponds to the finer scale at which
MULTI-RESOLUTION APPROACH FOR FINE STRUCTURE EXTRACTION - Application and Validation on Road
Images
143

Figure 1: Initial image example (I(x, y, 1)) – The crack cor-
responds to a local low-contrasted heterogeneity.
the feature has been identified. Details identified with
a better precision have therefore a higher value (e.g.
Figure 2).
Figure 2: RGL image of Figure 1 (I
RGL
(x, y)) – The brighter
the pixels, the higher the precision of the detection.
The next step aims to thin the RGL image fea-
tures to obtain 1-pixel wide objects, and has been
adapted from our initial work to this road application.
It needed to be modified since, contrary to membrane
edges, cracks do no form closed regions: therefore,
we can either apply the watershed algorithm after con-
sidering the background of the RGL image as seeds
(i.e. pixels which value is 0 and which touch non− 0
value pixels), or by applying a gray-scale thinning al-
gorithm (Redding, 1996). For its simplicity and lower
computational time, the watershed approach has been
used in this study. The resulting image I
pc
(e.g. Fig-
ure 3) points to the potential crack pixels (PCP).
Figure 3: Potential crack pixels from Figure 2 (I
pc
displayed
in blue on the original image).
A last step has been added to validate I
pc
and re-
duce the false detections: a PCP is validated if its
contrast is above a given threshold C
Tr
. To make the
measure more robust to the noise, instead of analyzing
each PCP independently, the contrast is averaged on
segments (a segment is a set of contiguous pixels hav-
ing at most two neighboring PCP, see Figure 4 for an
illustration of this vocabulary). The average contrast
C
seg
of a segment is the difference between the aver-
age gray-levelof the segment (GL
seg
), and the average
gray-level of the neighboring background (GL
Bkg
):
C
seg
= GL
Bkg
− GL
seg
. (3)
1 segment
Figure 4: A potential crack composed of 5 segments (each
having a different color).
GL
Bkg
(e.g. Figure 5) is measured using a large filter
averaging the neighboring values of the background
(pixels not labeled as PCP). The filter kernel size did
not seem critical, but it should be large enough to re-
duce the influence of noise, and small enough to con-
sider the irregularities of the road: a 25 × 25 pixels
kernel was experimentally chosen.
Figure 5: Estimated background of Figure 1.
A segment is considered as targeting a crack if
C
seg
> C
Tr
(e.g. Figure 6). Measures have been real-
ized to set the main parameters of the algorithms, i.e.
the kernel size of the standard deviation filter and the
threshold C
Tr
; we identified that the best results were
obtained with a 5× 5 pixels kernel and C
Tr
= 50. We
will describe the analysis methodology, and we will
restrain the presentation of the influence of C
Tr
on the
results.
Figure 6: Final crack detected on Figure 1 (usingC
Tr
= 40).
4 ASSESSMENT
METHODOLOGY
To evaluate and compare the crack detection methods,
we had to choose: a/ the tested images, b/ how to de-
termine the "ground truth" segmentation or reference
segmentation and c/ the criteria in order to quantita-
tively evaluate the results.
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
144

4.1 Images
The algorithms were evaluated on 3 sets of test im-
ages: on 14 synthetic crack images, on 10 real images,
and on 10 pre-processed real images. For synthetic
images, it is easy and reliable to give a ground truth
segmentation. For real images, estimate a "ground
truth" or a reference segmentation is more compli-
cated but the images are more realistic than the syn-
thetic images.
The 14 synthetic images were built using different
kinds of backgrounds: cracks were added on 8 im-
ages built with a random dot texture (sample S
1
), and
on 6 images of road containing no cracks, 2 of them
acquired with a static camera (sample S
2
), and 4 of
them dynamically acquired with a camera embedded
on a vehicle (sample S
3
). For the last four ones, con-
trolled lights were added. For all the 14 images, the
cracks were randomly added, with a random shape
and a random gray-level (Figure 7).
On the 10 real images, 4 were acquired using a
static camera and 6 using the dynamic system (Fig-
ure 7).
In the third set of test images, the 10 real images
were pre-processed using:
1. Threshold – In order to reduce the light halo in
some images (the last six ones presented in Fig-
ure 9), each pixel over a given threshold is re-
placed by the local average gray levels.
2. Smoothing – A mean filter of size 3×3 is applied.
3. Erosion – An erosion with a square structuring
element of size 3× 3 is applied.
4. Restoration – This last pre-processing tries to
combine the advantages of all the previous meth-
ods in three steps: histogram equalization, thresh-
olding (like Threshold), and erosion (like Ero-
sion).
4.2 Reference Segmentation
For real images, we briefly explain how the manual
segmentation is validated. Four experts manually seg-
mented the images with the same tools and in the
same conditions. Then, the four segmentations were
merged, following these rules:
1. A pixel labeled as crack by almost two experts
was kept;
2. Every pixel near to a pixel kept by step 1 was also
kept.
The second rule is iterative and stops when no pixel is
added.
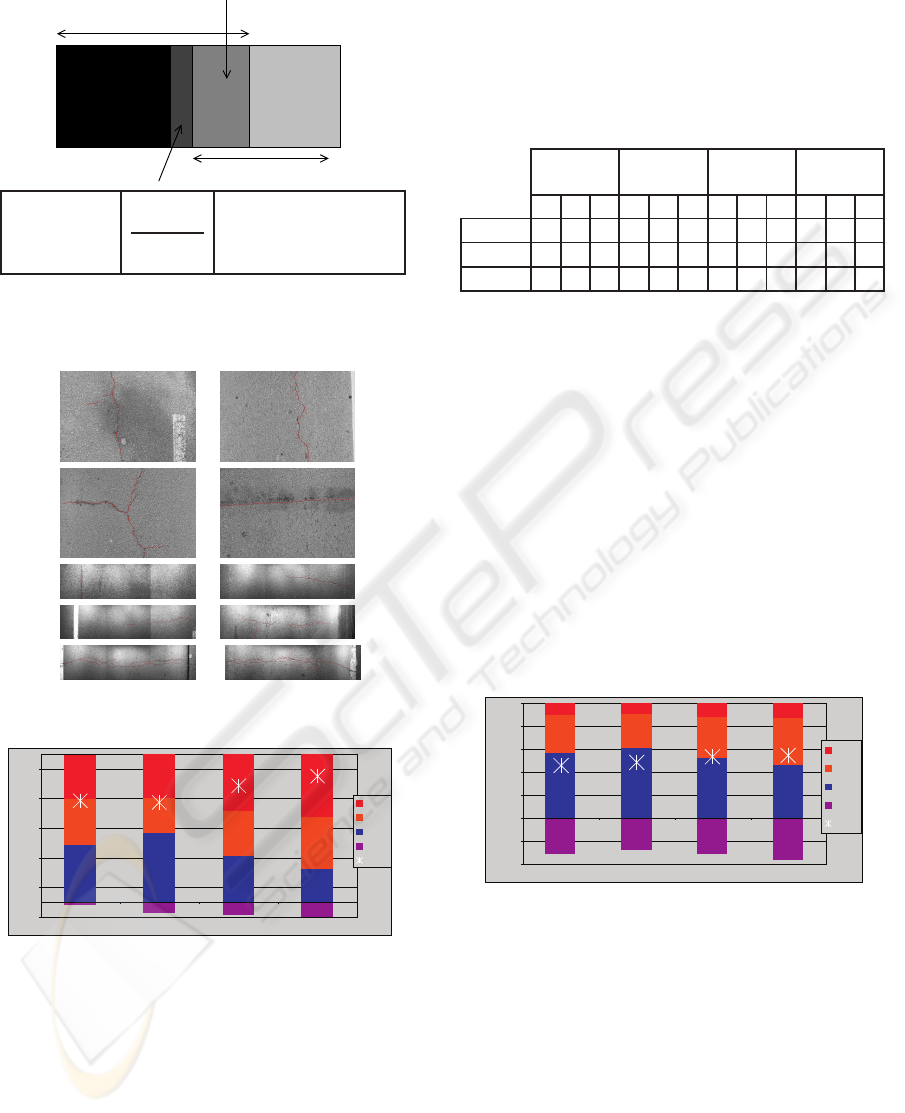
Synthetic image Ground truth
Real image + simulated
default
Ground truth
Real image manually segmented
Reference
Figure 7: Tested images.
Then, the result is dilated with a structuring ele-
ment of size 3× 3. Results of the manual segmenta-
tions are presented in Figure 9 (for more details, the
study of the reliability of these reference segmenta-
tions can be found in (Chambon et al., 2010)).
4.3 Quantitative Assessment
In Figure 8, the evaluation criteria are presented. They
are the most used in the literature, except "accepted"
pixels. In consequence, we have included accepted
pixels in the computation of the similarity coefficient.
For estimating accepted pixels, a threshold is applied
on the distance between the detected pixel and the ref-
erence segmentation. This threshold is estimated us-
ing the mean distance between each of the four seg-
mentations used for establishing the reference.
The DICE values lie on the [0;1] interval, but to
simplify the visualization of the results, we display
DICE×100 in all figures and tables of section 5.
5 RESULTS AND DISCUSSION
5.1 Synthetic Images
Figure 10 compares results for the different meth-
ods with synthetic images. It shows that the multi-
resolution withC
Tr
= 50 is the best to identify most of
MULTI-RESOLUTION APPROACH FOR FINE STRUCTURE EXTRACTION - Application and Validation on Road
Images
145
Positives (P)
False
Positives
(FP)
Accepted
Corrects = True positives (TP)
Reference
Negatives
False
(FN)
Similarity
coefficient or
Dice
similarity)
2TP
FN+TP+P
Ratio between good
detections and
non-detection
Figure 8: Evaluation criteria – Representation of the recov-
ery between an estimated segmentation (positives, P) and a
reference segmentation.
1 2
3 4
5 6
7 8
9 10
Figure 9: Manual ground truth segmentations.
-10
10
30
50
70
90
%
TP
Acc
FP
FN
DICE
AFMM
C
TR
= 30
C
TR
= 40
C
TR
= 50
MRDH
MRDH
MRDH
Figure 10: Summary of the algorithm performances on syn-
thetic images.
the edges, while the AFMM method is more adapted
to keep the proportion of FN low. By comparing
DICE values, the multi-resolution method appears to
be the most adapted.
Table 1 details the results for the different types
of images (samples S
1
to S
3
presented in section 4.1).
On fully synthetic images, both algorithms perform
very well. It appears that the images acquired with
the dynamic system are the most difficult to process,
Table 1: Results on Synthetic Images – The 3 image cate-
gories are: S
1
, fully synthetic images, S
2
, background ac-
quired with a camera and S
3
, background acquired with
the dynamic system. Results in bold indicate best values
and it illustrates how the MRDH approach outperforms the
AFMM, in particular, with the most difficult images (sam-
ple S
3
) where DICE is correct (greater than 50) whereas it
is very low with the other methods.
AFMM MRDH,
C
Tr
= 30
MRDH,
C
Tr
= 40
MRDH,
C
Tr
= 50
S
1
S
2
S
3
S
1
S
2
S
3
S
1
S
2
S
3
S
1
S
2
S
3
TP+Acc
87 46 15 68 41 30 86 53 43 91 66 59
FN 1.5 3.7 2.6 2.8 4.4 17 5.3 6.9 18 6.7 6.9 18
DICE
92 63 24 81 59 44 92 69 57 94 80 70
whatever the method used.
5.2 Real Images
Figure 11 displays the results obtained on the real im-
ages. We see that the amount of FN is higher than
with synthetic images, but we note that these values
are probably over-estimated,the human-referenceim-
ages tending to select only the major cracks. The
AFMM algorithm identified almost half of the cracks
selected by the human, and a bit more than half were
identified with the multi-resolution method. Consid-
ering the DICE measure, the multi-resolution tests
gave the best overall results; though, on camera ac-
quired images, DICE values can be considered as
equivalent for both methods.
-40
-20
0
20
40
60
80
100
%
TP
Acc
FP
FN
DICE
AFMM
C
TR
= 30 C
TR
= 40 C
TR
= 50
MRDH MRDH MRDH
Figure 11: Summary of the algorithm performances on real
images.
5.3 Real Pre-processed Images
Here, we compare the AFMM method with the
MRDH method (only the one with the more efficient
parameter, i.e. C
Tr
= 50, is discussed here) when the
real images are pre-processed. In particular, we eval-
uate the influence of the 4 pre-processing described in
section 4.1.
Table 2 shows the DICE measures obtained. It
can be seen that the four pre-processings enhance the
overall performances.
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
146

Table 2: DICE of pre-treated images: the three numbers
show the average values: with the 10 images (with the 4
images acquired in static way, with the 6 images acquired
in a dynamic manner).
AFMM MRDH, C
Tr
= 50
None 46 (49,44) 55 (52,57)
Threshold 64 (68,61) 55 (60,50)
Smoothing 66 (77,59) 52 (63,42)
Erosion 59 (58,60) 57 (64,51)
Restoration 52 (49,55) 57 (59,55)
When pre-processed with the threshold, smooth-
ing, erosion and restoration, the AFMM’s algorithm
is better, with the best results being obtained after a
smoothing. Also, smoothing and threshold have an
even more beneficial effect when static images are
used.
According to the DICE measure, the perfor-
mances of MRDH applied after pre-treatment are
quite disparate. In fact, it illustrates how this new
method is globally quite robust against the acquisition
conditions. Images do not need to be pre-processed in
order to increase the performances and this is an im-
portant superiority compared to the AFMM method
which is highly dependent on the acquisition condi-
tions. Analyzed in details, we notice that for static
images, DICE values seem to be enhanced by each
pre-processing, while DICE values seem to decrease
for "dynamic" images.
6 CONCLUSIONS
A methodology for adapting a multi-resolution-based
segmentation to the field of road crack detection has
been introduced. The experimental results demon-
strate the efficient results obtained on 14 synthetic
images and 10 significant real images. Moreover, it
shows how it outperforms a previous method based
on adapted filtering, in particular with the most dif-
ficult images acquired dynamically and that present
illumination defaults.
The next step of this work will be to validate this
work on more data (32 more images will be avail-
able soon). It has been shown that MRDH improves
the percentage of true detections (this percentage is
higher than with AFMM), but the AFMM presents
less false negatives. The next improvement will be
to reduce this phenomenon by introducing more con-
straints on the final step, like for example, an active
contour constraint instead of using only the constraint
on the contrast.
REFERENCES
Bray, J., Verma, B., Li, X., and He, W. (2006). A neural
nework based technique for automatic classification
of road cracks. In International Joint Conference on
Neural Networks, pages 907–912.
Chambon, S., Gourraud, C., Moliard, J.-M., and Nicolle, P.
(2010). Road crack extraction with adapted filtering
and markov model-based segmentation. In VISAPP.
Coudray, N., Buessler, J.-L., Kihl, H., and Urban, J.-P.
(2007). Tem images of membranes: a multiresolu-
tion edge-detection approach for watershed segmenta-
tion. In Physics in Signal and Image Processing (PSIP
2007).
Elbehiery, H., Hefnawy, A., and Elewa, M. (2005). Sur-
face defects detection for ceramic tiles using image
processing and morphological techniques. Proceed-
ings of World Academy of Science, Engineering and
Technology (PWASET), 5:158–162.
Frangi, A. F., Niessen, W. J., Vincken, K. L., and Viergever,
M. A. (1998). Muliscale vessel enhancement filtering.
In MICCAI, pages 130–137.
Geman, D. and Jedynak, B. (1996). An active testing model
for tracking roads in satellite images. IEEE Pattern
Analysis and Machine Intelligence, 18(1):1–14.
Iyer, S. and Sinha, S. (2005). A robust approach for auto-
matic detection and segmentation of cracks in under-
ground pipeline images. Image and Vision Computing,
23(10):921–933.
Koutsopoulos, H. and Downey, A. (1993). Primitive-based
classification of pavement cracking images. ASCE,
Journal of Transportation Engineering, 119(3):402–
418.
Redding, N. (1996). The autoscaling of oblique ionograms.
Technical report, Defence science and technology or-
ganization canberra.
Schmidt, B. (2003). Automated pavement cracking assess-
ment equipment – state of the art. Technical Report
320, Surface Characteristics Technical Committee of
the World Road Association (PIARC).
Subirats, P., Fabre, O., Dumoulin, J., Legeay, V., and Barba,
D. (2006). Automation of pavement surface crack de-
tection with a matched filtering to define the mother
wavelet function used. In European Signal Process-
ing Conference.
Tanaka, N. and Uematsu, K. (1998). A crack detection
method in road surface images using morphology.
In Workshop on Machine Vision Applications, pages
154–157.
MULTI-RESOLUTION APPROACH FOR FINE STRUCTURE EXTRACTION - Application and Validation on Road
Images
147
