
A HYBRID APPROACH FOR HIGH QUALITY REAL-TIME
TERRAIN RENDERING AND OPTIMIZED A-PRIORI ERROR
ESTIMATION
Falko L
¨
offler, Sebastian Schwanke and Heidrun Schumann
Institute of Computer Science and EE, University of Rostock, Albert-Einstein-Strasse 21, Rostock, Germany
Keywords:
Terrain rendering, Level of detail, Longest-edge-bisection, Refinement criteria, Cached geometry, Multi-core
CPU.
Abstract:
This paper describes a hybrid approach for high-quality real-time terrain rendering. The contributions of the
work are twofold. First, a novel parallel preprocessing scheme for necessary a-priori error-bounds calculation
based on the widely applied longest-edge-bisection approach is proposed, which exploits current multi-core
CPU architectures. Compared to the common recursive and thus computationally expensive procedure, a sig-
nificant performance increase can be achieved. Second, a novel method for view-dependent terrain rendering
is described which combines the advantages of triangle-based CPU and patch-optimized GPU algorithms. We
exploit frame-to-frame coherence by caching refined geometry on local VRAM in combination with an opti-
mized update process. In contrast to patch-based methods, a substantial reduction of the number of primitives
and rendering time can be achieved.
1 INTRODUCTION
In the last decade, many terrain rendering algorithms
have been developed. Due to the close interrelation
of rendering quality, rendering time and available re-
sources, a compromise between these aspects has to
be found (L
¨
offler et al., 2009). This is a challenging
task.
To achieve high-quality images in real-time, a
multi-resolution data structure is required, which is
generated in a preprocess. In particular, triangulated
irregular networks (TIN) require an exhaustive pre-
process and large storage. Thus, data structures on a
semi-regular basis are commonly used. This leads to
an improved balance in terms of preprocessing time
and the number of primitives to be rendered. For this
purpose, the longest-edge-bisection scheme is widely
applied (e.g., in (Pajarola and Gobbetti, 2007)). It
requires a recursive and therefore computationally
expensive a-priori object-space error determination.
The object space errors serve as refinement criteria
for the view dependent triangle- or patch-based ren-
dering process. For high-quality terrain rendering,
small error tolerances have to be used. In the case of
triangle-based algorithms this leads to the well-known
CPU-GPU bottleneck. Patch-based algorithms reduce
this bottleneck, but on the cost of a higher number of
primitives to be rendered.
The goal of this work is two-fold. First, we ac-
celerate the process of refinement criteria determi-
nation by exploiting multi-core CPU architectures.
We therefore introduce a novel parallel a-priori er-
ror estimation scheme characterized in Section 3.
As a result, preprocessing time could be decreased
by several orders of magnitude. Second, we com-
bine the advantages of triangle- and patch-based ap-
proaches by proposing a novel hybrid approach for
view-dependent refinement (see Section 4). Given a
particular error tolerance, we reduce the number of
primitives and speed up the rendering process by ex-
ploiting frame-to-frame coherence. The results are
presented in Section 5. Before going into detail, we
reflect previous work in the next section.
2 RELATED WORK
In the last decade, many terrain rendering algorithms
have been proposed. High-quality real-time render-
ing, especially terrain rendering, has to deal with
very large data-sets. Hence, the usage of multi-
resolution data structures is indispensable to gain in-
teractive frame rates. Two types of data structures are
233
Löffler F., Schwanke S. and Schumann H. (2010).
A HYBRID APPROACH FOR HIGH QUALITY REAL-TIME TERRAIN RENDERING AND OPTIMIZED A-PRIORI ERROR ESTIMATION.
In Proceedings of the International Conference on Computer Graphics Theory and Applications, pages 233-238
DOI: 10.5220/0002824602330238
Copyright
c
SciTePress
commonly used: First, techniques that are based on
general, mainly unconstrained, triangulations (TIN),
and second, semi-regular representations. Exam-
ples of the first category are described in (Puppo,
1998; Cignoni et al., 1997; Hoppe, 1998) and,
e.g., the GPU-based approach of (Hu et al., 2009).
These algorithms generate a high-quality terrain mesh
with an adequate number of triangles (Evans et al.,
2001). However, these algorithms require complex
data structures and a complex preprocessing.
Algorithms of the second category simplify the
preprocess on the cost of a higher number of triangles
to be rendered. Most of these algorithms are based
on the simple, but powerful subdivision scheme of
longest–edge–bisection (Duchaineau et al., 1997; Pa-
jarola, 1998; Lindstrom et al., 1996; R
¨
ottger et al.,
1998; Evans et al., 2001). This scheme recursively
splits an isosceles right triangle (vl,va,vr) at the mid-
point vm of its hypotenuse (vl,vr) into two triangles
(vl, vm,va) and (va,vm, vr). As described in (Lind-
strom and Pascucci, 2002), such a mesh can be rep-
resented as a direct acyclic graph (DAG), the ver-
tex graph. The mesh vertexes define the node set,
whereas the edge set is defined by all directed edges
(va,vm) that correspond to a triangle split. The graph
is described by a recursive indexing scheme. Dur-
ing the preprocess, each vertex is associated with the
refinement criteria including the bounding sphere er-
ror radius and the radii of its child nodes (also re-
ferred to as nested error saturation to guarantee crack-
freeness).
In general, two types of rendering algorithms are
applied: First, those working at the triangle/vertex
primitive level and those at clusters of primitives
(patches). Approaches of the first category need fewer
triangles but lead to the CPU-GPU bottleneck. To
overcome this bottleneck, approaches of the second
category use patches optimized for GPU throughput
requiring just a few CPU instructions (Cignoni et al.,
2005). Hence, more geometry has to be rendered. For
instance, (Levenberg, 2002) dynamically extracts tri-
angle clusters during view-dependent rendering and
caches the geometry on the GPU. Following this ap-
proach, various GPU-oriented multi-resolution struc-
tures have been proposed, for instance (Pomeranz,
2000; Cignoni et al., 2003; Hwa et al., 2004; B
¨
osch
et al., 2009). Especially (Cignoni et al., 2003) com-
bines the advantages of semi-regular structures and
TIN for high performance terrain rendering. For an
excellent overview, we refer to (Pajarola and Gob-
betti, 2007).
Triangle-based and patch-based approaches as
well require an adequate a priori error estimation.
Therefore, we introduce our error estimation scheme
in Section 3 before discussing our new hybrid terrain
rendering method in Section 4.
3 A-PRIORI ERROR
ESTIMATION
Using common recursive a-priori error estimation
schemes for parent-child relationship determination
requires the bottom-up traversal of the vertex graph
hierarchy node-by-node. In order to accelerate this
process, we take advantage of recent multi-core CPU
architectures. However, the challenge is to determine
the parent-child relationships in parallel. Our novel
solution is to harness these relationships from dia-
mond entities. Diamonds can be characterized con-
sisting of triangles of the same level, which share their
adjacent hypotenuse (see, i.e., (Hwa et al., 2004)). A
diamond is associated with a center vertex (the dia-
mond vertex), the diagonal edge, and one quadrilateral
face. The parents and children of a diamond can be
described using a special indexing scheme (see Sec-
tion 3.1), which we adapt to the vertex graph structure
since each vertex in the vertex graph represents a di-
amond. Parent-child relationships of two consecutive
levels can now be extracted, if those of the coarser
level are known (see Section 3.2). The novelty is that
we are enabled to consider all vertexes of one level
independently of each other. Thus, we determine the
refinement criteria by sequentially treating the levels
bottom-up combined with their inner-level determina-
tion in a parallel way.
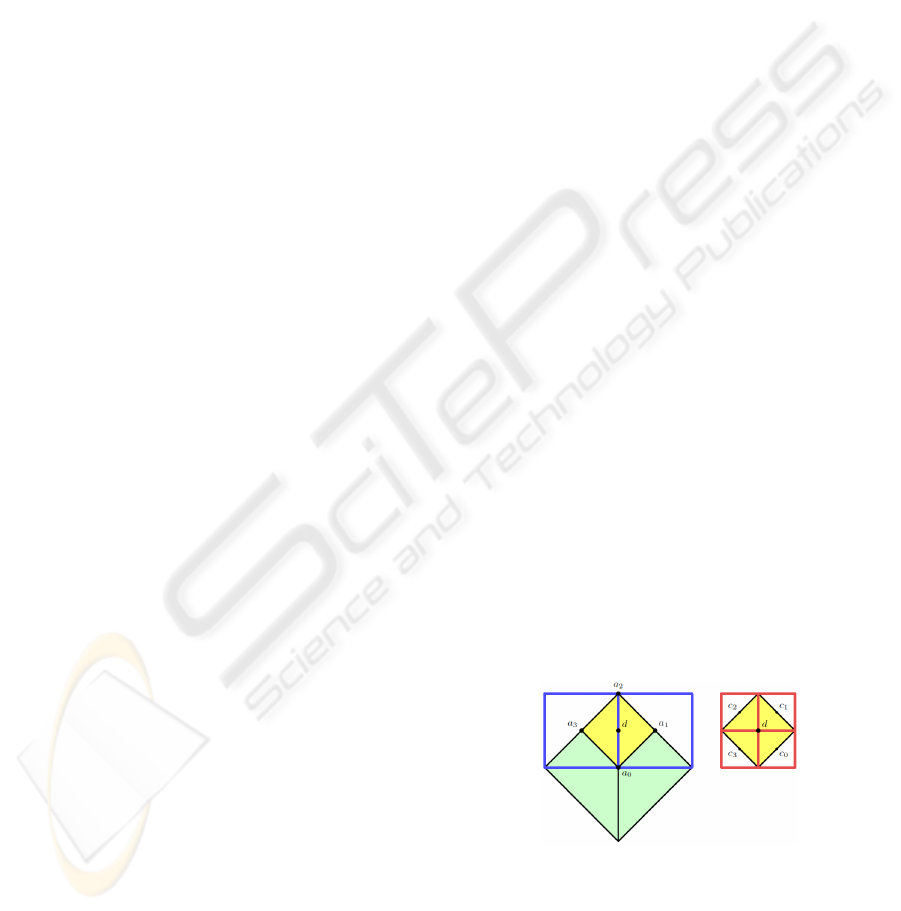
3.1 Basic Indexing Scheme
Following the indexing scheme of (Hwa et al., 2004),
the face of a diamond d is described by the diamond
ancestors a
0
,. ..,a
4
(see Figure 1). The hypotenuse
Figure 1: A diamond d (yellow) is shown with its ancestors
(left) and its children (right)(Hwa et al., 2004). The green
ancestor is a
0
, the two parents are a
1
and a
3
(blue outline).
ds children are c
0...3
(red). Note that the orientation is ro-
tated by 45
◦
each level.
of the two adjacent triangles, is characterized by the
ancestors a
0
and a
2
and split by d. Using the locations
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
234
of the ancestors, the locations of the child diamonds
c
i
with i = 0, ..., 3 can be determined as follows:
c
i
= (a
i
+ a
(i+1) mod 4
)/2 (1)
Using this information, the computation and satura-
tion of the refinement criteria of a diamond d as de-
scribed in (Lindstrom and Pascucci, 2002) is possible.
However, only implicit access is feasible due to the
recursive indexing scheme. Consequentially, we in-
troduce how to solve parent-child relationships with
regard to an explicit position of a vertex in the vertex-
graph in the next section.
3.2 Our General Scheme
We must identify the four ancestors of a vertex in
the vertex graph to adapt the indexing scheme de-
scribed above in order to determine parent-child rela-
tionships. However, three problems for arbitrary ver-
tex positions can be identified: First, the orientation
of a diamond alternates from level to level. Second,
different levels form different diamond sizes and de-
pendent on that, different ancestor permutations exist.
To accomplish this, a computation rule for ancestor
identification is required.
For that reason, we position special diamond ker-
nels with a kernel configuration k and the kernel posi-
tion k
p
on appropriate vertexes. We address the first
problem by categorizing each level l into an even = (n
mod 2 == 0) and an odd = (n mod 2 == 1) level,
where 2∗n levels exist with regard to height field sizes
of 2
n
+1. Hence, we introduce two different diamond
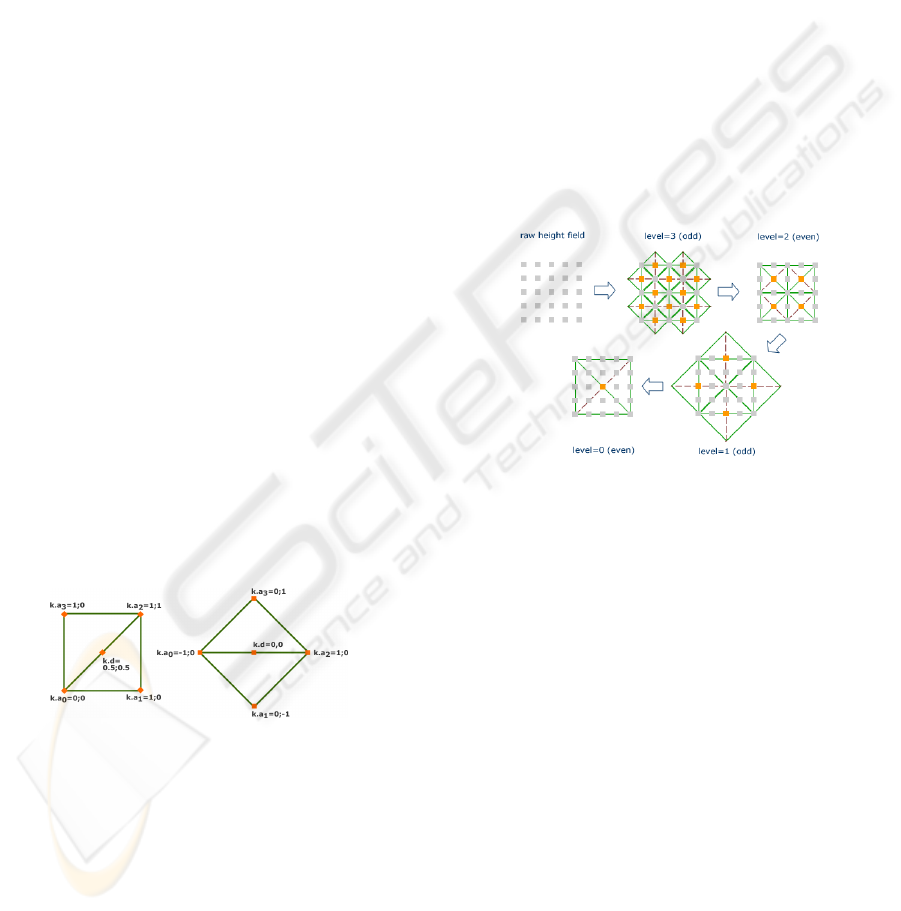
kernels for both level types. The configurations are
illustrated in Figure 2.
Figure 2: Configuration of the diamond kernels for even
(left) and odd (right) levels, respectively.
To address the second and third problem, we de-
termine the distance s = 2
l/2
of parent and child dia-
mond vertexes and introduce bias b in dependence on
l. b represents the specific permutation of the ances-
tors. As it can be seen, the ancestor permutation of
the split edge a
0
,a
2
can be neglected, since the ver-
tex order is only relevant for rendering in the sense of
back-face culling. Hence, we derive two cases: b = 1
represents a horizontally, b = 0 a vertically aligned
diamond.
b can be determined as follows:
b =
(k
p.x
+ k
p.y
) mod 2 l = even
k
p.y
mod 2 l = odd
(2)
With the help of these parameters, the locations of the
ancestor a
i
and the diamond vertex d can now be de-
termined as follows, where makeIdx realizes the map-
ping of a position to an index:
j = (i + b) mod 4 (3)
a
i
= makeIdx((k
p
+ k.a
j
) ∗ s) (4)
d = makeIdx(k
p
∗ s + k.d ∗ s) (5)
Using this approach, we can determine the refine-
ment criteria in a bottom-up fashion by applying the
diamond kernels in parallel for each level. This is
achievable due to fact that the kernel attributes only
depend on the current level and the position of the
kernel (see an example in Figure 3).
Figure 3: Processing sequence of a 5x5 height-field. Start-
ing at the finest level, for each diamond on a level the re-
finement criteria are computed and saturated by maximiz-
ing the error over the child vertexes. The vertexes on a level
are processed in parallel.
4 OUR HYBRID APPROACH
The key idea is now to combine the advantages
of triangle- and patch-based approaches for view-
dependent rendering. Our procedure is as follows:
First, we construct a semi-regular multi-resolution
data structure of patches in a preprocess (see Sec-
tion 4.1) based on the refinement criteria (see Sec-
tion 3). During rendering, we select appropriate
patches. These patches are then dynamically trian-
gulated (see Section 4.2) and cached on the GPU for
frame-to-frame-coherent reuse. This commonly re-
quires an extensive cache validity evaluation for sub-
sequent frames. Hence, Section 4.3 introduces our
update process including a simple but efficient cache
validity evaluation. This results in a reduction of the
vast triangle workload given a particular error toler-
ance during the rendering process.
A HYBRID APPROACH FOR HIGH QUALITY REAL-TIME TERRAIN RENDERING AND OPTIMIZED A-PRIORI
ERROR ESTIMATION
235

4.1 Patch LOD Construction
In an a-priori step, we construct a multi-resolution
hierarchy of patches. A cut through this hierarchy
represents a coarse grain triangulation of the terrain,
in that each precomputed patch triangle represents a
regular sub-triangulation. Therefore, it is necessary
to derive patch-related refinement criteria, which we
derive using the per-vertex refinement criteria (see
Section 3) by estimating the maximum error of the
patch as a consequence. Thus, the patch-related crite-
ria are also nested. Our hierarchical patch structure
is based on a diamond-graph as proposed in (Hwa
et al., 2004) since this data structure guarantees crack-
freeness in combination with the nesting properties.
In this way, each diamond is associated with vertex
attributes of two triangular patches with an adjacent
hypotenuse. Using this structure, we can use the al-
gorithm of (Lindstrom and Pascucci, 2002) to select
an appropriate patch during rendering.
4.2 View-dependent Triangulation
Selecting a patch naively represents a regular sub-
triangulation. Hence, we dynamically refine the se-
lected patch and therefore adapt the algorithm of
(Lindstrom and Pascucci, 2002) for triangular patches
over a regular grid of the size 2
n
+ 1 (see Section
2). The resulting strip is transferred to the graphics
board. According to (Lindstrom and Pascucci, 2002),
we perform the refinement of patches and the ren-
dering concurrently. However, the refinement from
scratch of each visible patch in each frame is a tedious
task.
Hence, we store triangulation results on local
VRAM for frame-to-frame coherent reuse, which en-
ables us to fully exploit the rendering performance
of recent GPUs and to reduce CPU-GPU transfer.
Though, the necessary validity re-evaluation requires
expensive CPU workload due to the per-vertex evalu-
ation. We therefore introduce our update process in-
cluding an optimized error evaluation scheme in the
next section.
4.3 Update Process
In subsequent frames, our update process determines
for each selected patch if a cached triangulation is
still valid leading to its reuse, or not, which results
in a view-dependent triangulation. We first describe
some basics for determining the appropriate triangu-
lation during the rendering process, which we adapt
to our update mechanism.
During the rendering process, the cut, i.e. the level
of mesh detail with regard to given refinement cri-
teria (including all so-called active vertexes) has to
be determined (Puppo, 1998). To decide the activity
state of each vertex v
i
, the screen-space error toler-
ance τ can be evaluated in dependence on the associ-
ated object-space error δ
i
, the vertex position p
i
, the
bounding sphere error radius r
i
and a perspective pro-
jection factor λ as follows (Lindstrom and Pascucci,
2002):
τ < λ
δ
i
k p
i
− e k −r
i
(6)
Hence, all vertexes on the cut - the vertex fron-
tier - and ”above” are active and thus part of the tri-
angulation, whereas the other vertexes are inactive.
This means that this cut is valid for subsequent view-
points, if the activity state of all vertexes does not
change. However, this requires both storing and ex-
pensively evaluating the entire vertex frontier. To
avoid this, we confine the validity evaluation to check-
ing the new view-point against a sphere of validity de-
termined during the view-dependent triangulation of
the patch.
The utilized error metric (see Equation 6) is
isotropic and can be interpreted as blowing up a spher-
ical region s
i
= (p
i
,r
s
i
) around each vertex v
i
where
r
s
i
represents the distance between the view-point and
the vertex v
i
with respect to Equation 6. Hence, we
rearrange the equation to:
r
s
i
=
δ
i
λ
τ
+ r
i
(7)
As a consequence, the vertex is active, if the view-
point e is located in that sphere, inactive otherwise.
The region of validity of a cut can now be described as
the difference of the following two regions (see Fig-
ure 4): First, the intersection of all spheres of all ac-
tive vertexes. If the view-point leaves this region, one
of the vertexes becomes inactive. Second, the union
of the spheres of all inactive vertexes. If the view-
point enters this region, one of the vertexes becomes
active.
However, this region is very expensive to evalu-
ate. Hence, we simplify this region to a sphere char-
acterized by the current view-point e and the minimal
distance ε between e and any sphere s
i
as follows:
ε =
n
min
i=0
| r
s
i
− k p
i
− e k| (8)
The resulting sphere of validity is an upper es-
timate and thus we guarantee that a triangulation is
always valid, if subsequent view-points e
0
are inside
this sphere. Therefore, we only need to evaluate, if
ε >k e − e
0
k.
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
236
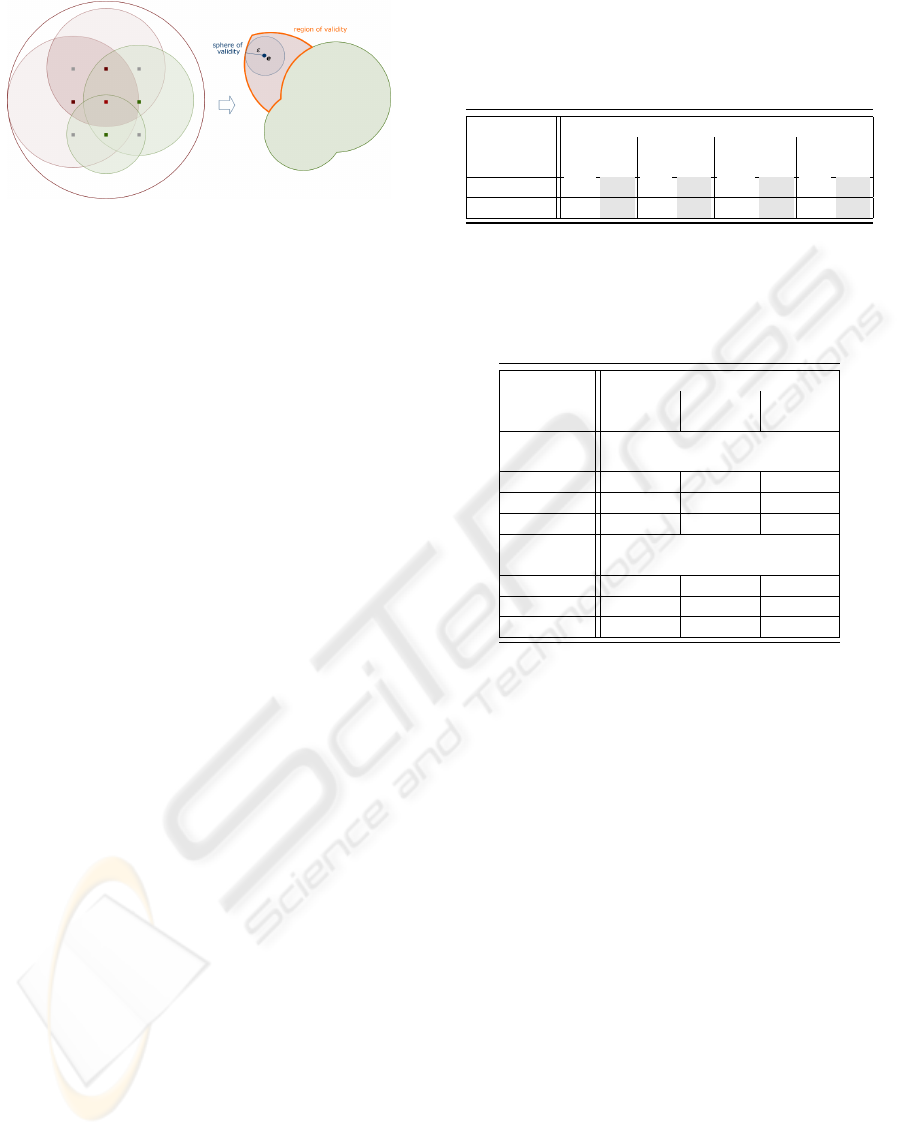
Figure 4: Red represents the spheres of the active vertexes
and green those of the inactive vertexes with respective re-
gion of validity and sphere of validity for a view-point.
5 RESULTS
We implemented our approaches using C++ and
OpenGL. We measured the performance of our novel
a-priori error estimation scheme with 1k, 2k, 4k and
8k height fields. Two different hardware configura-
tions were utilized including a single-core Pentium 4
3 GHz and a quad-core 2,83 GHz CPU in order to
evaluate hardware parallelism. The respective prepro-
cessing times are shown in Table 1. The results clearly
show that using our parallel error estimation scheme
decreases preprocessing times in any case. On both
configurations, our approach diminishes preprocess-
ing time linearly with increasing height field sizes. On
the single-core environment our approach accelerates
the processing by factor 4-5, whereas exploiting hard-
ware parallelism, the factor even rises up to 10-12.
As a result, our approach is well-suited for on-the-fly
height field processing.
The results of our hybrid approach have been cap-
tured on the quad-core configuration equipped with a
GeForce GTX 280, using 1k, 2k and 4k height field
dimensions and a screen-resolution of 1280x800. We
compared our hybrid method with a representative
pre-generated patch-based method with a static patch
size of 65 according to (B
¨
osch et al., 2009). Ren-
dering and dynamic tessellation were driven concur-
rently (Lindstrom and Pascucci, 2002). The results
are reported in Table 2. As figured out, our approach
significantly reduces the triangle count per frame (by
up to 84%) with regard to the minimum error toler-
ance. With small error tolerances in general, high res-
olution patches must be selected, which results in a
vast amount of rendered primitives. In contrast, an en-
tire significant performance gain is achieved using our
method, particularly with increasing error tolerances.
This is due to the frequent cache reuse capability of
our algorithm. In terms of minimum tolerances, the
necessary high re-triangulation effort affects render-
ing performance and caching capabilities.
Table 1: Performance comparison of preprocessing times
in seconds in regard to the hardware configurations. Note
that rpcs means the straight forward recursive computation
scheme, while ppcs represents our novel parallel computa-
tion scheme.
Height field size
CPU 1k 2k 4k 8k
rpcs ppcs r pcs ppcs rpcs ppcs r pcs ppcs
Single −Core 1,43 0,28 5,17 1,18 20,03 4,71 65,3 16,9
Quad −Core 0,58 0,05 2,27 0,20 9,18 0,76 36,8 3.18
Table 2: Results of the quad-core test environment with
regard to a patch-based implementation compared to our
hybrid approach. The table shows the average frame rate
f ps and the average number of rendered triangles per frame
num
∆
.
Height field size
Error tolerance 1k 2k 4k
f ps num
∆
f ps num
∆
f ps num
∆
Patch-based approach
0,5 284 1082k 143 2732k 82 4642k
1,0 286 1079k 191 1885k 121 3001k
2,0 291 1037k 261 1223k 212 1522k
Our hybrid approach
0,5 299 947k 172 665k 113 758k
1,0 427 472k 343 343k 274 339k
2,0 570 175k 566 147k 497 136k
6 CONCLUSIONS
We presented a novel approach for a-priori error
estimation scheme exploiting hardware parallelism
which is widely applicable. Furthermore, we pro-
posed a novel hybrid approach for view-dependent re-
finement. This algorithm incorporates the advantages
of both patch-based and triangle-based data struc-
tures. In more detail, we suggested selecting appro-
priate patches from a predetermined patch hierarchy
and refining them on a per-triangle basis. Addition-
ally, an optimized cache validity evaluation for reuse
of geometry persisting in the GPU memory was in-
troduced. The results reported improved preprocess
time, reduction of triangles per frames as well as a
gain in rendering performance.
We see the scope of future work in extend-
ing our scheme for out-of-core processing. More-
over, we would further harness heterogeneous hard-
ware platforms in general (for instance, OpenCL).
This includes the a-priori error estimation and view-
dependent refinement. A further point of interest is to
adapt our hybrid method to TINs due to the possible
reduction of primitives to be rendered.
A HYBRID APPROACH FOR HIGH QUALITY REAL-TIME TERRAIN RENDERING AND OPTIMIZED A-PRIORI
ERROR ESTIMATION
237

Figure 5: Comparison of preprocessed and dynamic triangulation of patches. left: static pre-generated patch triangulation;
middle: textured representation; right: dynamic triangulation generated by our hybrid approach. Notice the significant reduc-
tion of triangle count on the right side.
REFERENCES
B
¨
osch, J., Goswami, P., and Pajarola, R. (2009). RASTeR:
Simple and Efficient Terrain Rendering on the GPU.
In Eurographics 2009 - Areas Papers, pages 35–42.
Eurographics Association.
Cignoni, P., Ganovelli, F., Gobbetti, E., Marton, F., Pon-
chio, F., and Scopigno, R. (2003). BDAM - batched
dynamic adaptive meshes for high performance terrain
visualization. Computer Graphics Forum, 22:505–
514.
Cignoni, P., Ganovelli, F., Gobbetti, E., Marton, F., Pon-
chio, F., and Scopigno, R. (2005). Batched multi tri-
angulation. IEEE Visualization, 2005. VIS 05, pages
207–214.
Cignoni, P., Puppo, E., and Scopigno, R. (1997). Represen-
tation and visualization of terrain surfaces at variable
resolution. In The Visual Computer, pages 50–68.
Duchaineau, M. A., Wolinsky, M., Sigeti, D. E., Miller,
M. C., Aldrich, C., and Mineev-Weinstein, M. B.
(1997). Roaming terrain: real-time optimally adapt-
ing meshes. In IEEE Visualization, pages 81–88.
Evans, W., Kirkpatrick, D., and Townsend, G. (2001).
Right-triangulated irregular networks. Algorithmica,
30(2):264–286.
Hoppe, H. (1998). Smooth view-dependent level-of-detail
control and its application to terrain rendering. Visu-
alization Conference, IEEE, 0:35.
Hu, L., Sander, P., and Hoppe, H. (2009). Parallel view-
dependent refinement of progressive meshes. In Pro-
ceedings of the 2009 symposium on Interactive 3D
graphics and games, pages 169–176. ACM New York,
NY, USA.
Hwa, L. M., Duchaineau, M. A., and Joy, K. I. (2004).
Adaptive 4-8 texture hierarchies. In VIS ’04: Pro-
ceedings of the conference on Visualization ’04, pages
219–226, Washington, DC, USA. IEEE Computer So-
ciety.
Levenberg, J. (2002). Fast view-dependent level-of-detail
rendering using cached geometry. In VIS ’02: Pro-
ceedings of the conference on Visualization ’02, pages
259–266, Washington, DC, USA. IEEE Computer So-
ciety.
Lindstrom, P., Koller, D., Ribarsky, W., Hodges, L. F.,
Faust, N., and Turner, G. A. (1996). Real-time, con-
tinuous level of detail rendering of height fields. In
SIGGRAPH ’96: Proceedings of the 23rd annual con-
ference on Computer graphics and interactive tech-
niques, pages 109–118, New York, NY, USA. ACM.
Lindstrom, P. and Pascucci, V. (2002). Terrain simpli-
fication simplified: A general framework for view-
dependent out-of-core visualization. IEEE Trans-
actions on Visualization and Computer Graphics,
8(3):239–254.
L
¨
offler, F., Rybacki, S., and Schumann, H. (2009). Error-
Bounded GPU-Supported Terrain Visualisation. In
WSCG’09 Communication Papers Proceedings, pages
47–54. University of West Bohemia.
Pajarola, R. (1998). Large scale terrain visualization us-
ing the restricted quadtree triangulation. Visualization
Conference, IEEE, 0:19.
Pajarola, R. and Gobbetti, E. (2007). Survey on semi-
regular multiresolution models for interactive terrain
rendering. The Visual Computer, 23(8):583–605.
Pomeranz, A. (2000). ROAM Using Surface Triangle Clus-
ters (RUSTiC). PhD thesis, UNIVERSITY OF CALI-
FORNIA.
Puppo, E. (1998). Variable resolution triangulations. Com-
putational Geometry: Theory and Applications, 11(3-
4):219–238.
R
¨
ottger, S., Heidrich, W., and Seidel, H.-P. (1998). Real-
time generation of continuous levels of detail for
height fields. pages 315–322.
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
238
