
A VISION-BASED HYBRID SYSTEM FOR REAL-TIME ACCURATE
LOCALIZATION IN AN INDOOR ENVIRONMENT
Vincent Gay-Bellile, Mohamed Tamaazousti, Romain Dupont and Sylvie Naudet Collette
CEA, LIST, Laboratoire Vision et Ingnierie des Contenus, Point Courrier 94, Gif-sur-Yvette, F-91191, France
Keywords:
Human Localization, Indoor Environment, Real-Time, Monocular vision.
Abstract:
This paper presents an indoor vision-based system using a single camera for human localization. Without a
priori knowledge of the operating environment, a map has to be built on-line to estimate the relative positions
of the camera. When a model is a priori known, only the camera poses are computed. It results in distinctive
algorithms which have both assets and drawbacks. Localization in an unknown environment is much more
flexible but subject to drift while localization in a known environment is almost drift-less but suffer from
recognition failures. We propose a new approach to localize a camera in an indoor environment. It combines
both techniques described above benefiting from the knowledge of Georeferencing information to reduce the
drift (comparatively to localization in unknown environment) while avoiding the user to be lost during long
time intervals. Experimental results show the efficiency of our method.
1 INTRODUCTION
Human localization in an Indoor Environment is a
very challenging issue. Indeed, GPS sensor (Brus-
ningham et al., 1989) is indoor ineffective and useful
information, used for vehicles or robots localization,
such as odometry (OKane, 2006) or nonholonomic
motion model (Scaramuzza et al., 2009) can not be
exploited. Other technologies such as WI-FI (Ocana
et al., 2005) or RFID (Hahnel et al., 2004) permit
to overcome such limitation but they require environ-
ment instrumentation through installation of specific
equipments in the building. For our targeted applica-
tion, i.e. localization of security troops in a building,
a mobile wearable technology equipped with a single
camera appears to be a solution with higher accept-
ability.
This paper proposes a purely vision-based sys-
tem for human localization in an indoor environment.
Vision-based localization algorithms can be classi-
fied into two major types: Localization in Known
and UnKnown Environments. Thereafter, we use the
acronyms LKE and LUKE respectively.
The former exploits a Georeferencing Structure
from Motion point cloud that is built and stored off-
line, see e.g. (Arnold et al., 2009; Schindler et al.,
2007). Interest points, extracted from the images, are
matched with the 3D points of the database: the cam-
era poses are then computing through robust linear
and non linear optimizations. LKE algorithms suffer
from recognition failures mainly due to appearance
variations since the database has been learned. They
are introduced by illumination changes (in the win-
dows and lighting source neighborhoods for indoor
environments), furniture relocation, etc. It results in
many unrecognized areas.
On the other hand LUKE algorithms build a map
(i.e. a 3D point cloud) on the fly, i.e. along with
the camera localization (Davison, 2003; Mouragnon
et al., 2006). They appear to be more generic since
no a priori information is necessary but suffer from
drift due to accumulation of errors (building the map
depends on the camera pose and inversely) and from
the scale ambiguity of monocular vision algorithms.
An hybrid system that constitutes the best of two
worlds is described in this paper. The proposed idea
is to progressively correct the camera poses returned
by the LUKE algorithm when parts of the model are
recognized in the images through the LKE algorithm.
It presents several assets:
• Compare to LUKE: the drift is limited.
• Compare to LKE: the user is not lost when
recognition fails. An other advantage is that the
environment must not be fully learned anymore.
This is very useful for an embedded system since
216
Gay-Bellile V., Tamaazousti M., Dupont R. and Naudet Collette S. (2010).
A VISION-BASED HYBRID SYSTEM FOR REAL-TIME ACCURATE LOCALIZATION IN AN INDOOR ENVIRONMENT.
In Proceedings of the International Conference on Computer Vision Theory and Applications, pages 216-222
DOI: 10.5220/0002825602160222
Copyright
c
SciTePress

the memory space takes up by the database can be
drastically reduced.
Finally, combining these two algorithms may be
time consuming. Real-time processing is maintained
through parallel computing and a specific thread man-
agement.
Roadmap. Details on LUKE and LKE algorithms
are given in §2 and in §3 respectively. In §4, we de-
scribe how these algorithms are combined together.
Experimental results on real data are reported in §5.
Finally, we give our conclusions and discuss further
work in §6.
2 LOCALIZATION IN AN
UNKNOWN ENVIRONMENT
LUKE algorithms are used when no a priori on the
observed environment is available. The environment
and the trajectory of the moving camera are simulta-
neously reconstructed from a video. The main draw-
back of LUKE algorithms is the unavoidable drift due
to accumulation of errors and the scale ambiguity.
Various approaches have been proposed for real-time
localization in an unknown environment. They can
be classified into two major types: local bundle ad-
justment (Mouragnon et al., 2006; Nister et al., 2004)
and Kalman filter (Davison, 2003) based algorithms.
We rather used the former approach since it has been
proved to be more accurate, see (Klein and Murray,
2007). We describe briefly the solution proposed in
(Mouragnon et al., 2006) which is used in our experi-
ments. A triplet of images is firstly selected to set up
the world coordinate frames and the initial geometry.
After this initialization, robust pose estimation is car-
ried out for each frame of the video using points de-
tection and matching. Note that in our experiments,
we used Harris corners (Harris and Stephens, 1988)
detector and SURF descriptors (Bay et al., 2008). A
crucial point described in (Mouragnon et al., 2006) is
that 3D points are not reconstructed for all the frames.
Specific ones are selected as key-frames and are used
for triangulation. A key-frame is chosen when the
motion is sufficiently large to accurately compute the
3D positions of matched points but not too much to
keep matching. The system operates in an incremen-
tal way, and when a new key-frame and 3D points
are added, it proceeds to a local bundle adjustment:
cameras associated to the latest key-frames
1
and 3D
1
the three latest key frames are updated in (Mouragnon
et al., 2006).
points they observed are updated. This algorithm is
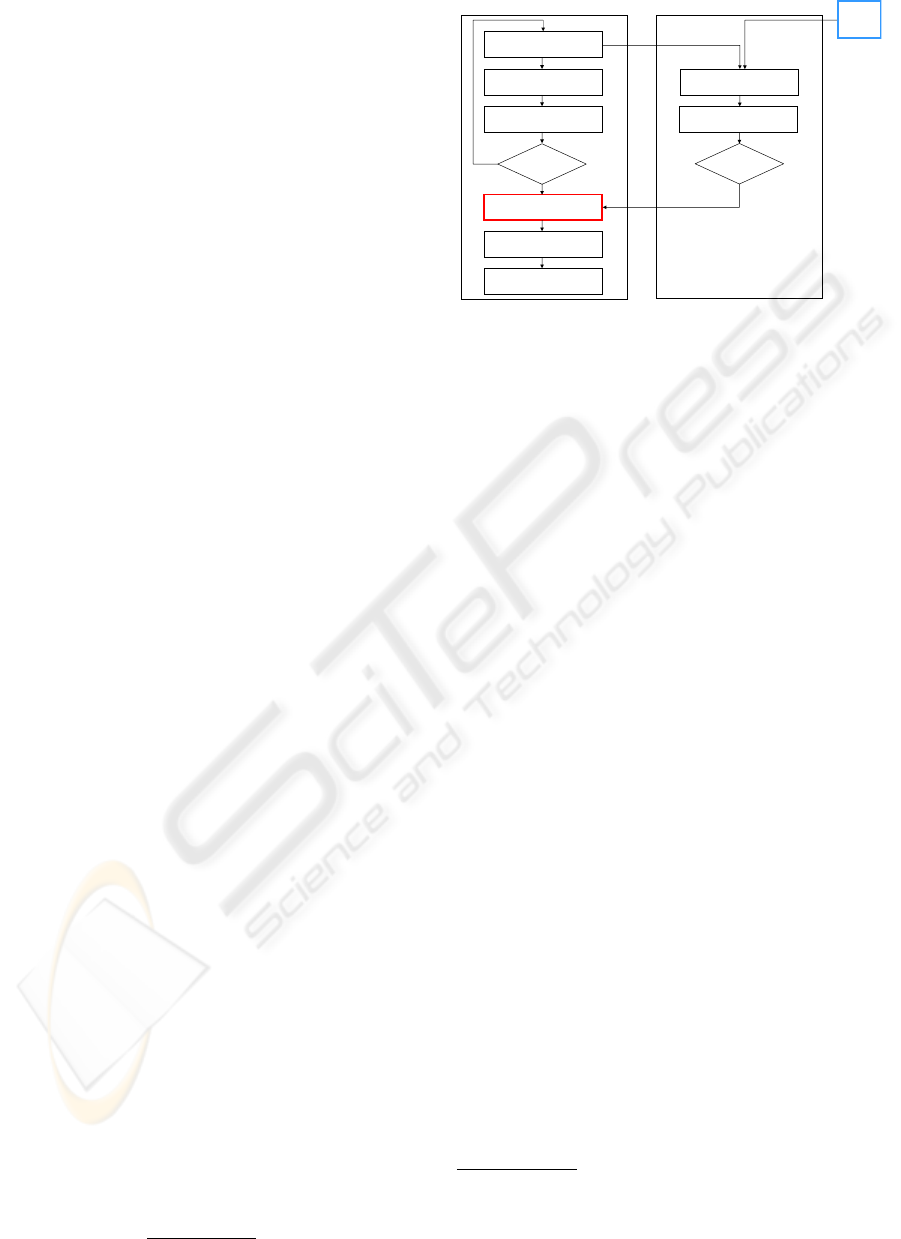
summarized in figure 1 (Thread # 1).
3 LOCALIZATION IN A KNOWN
ENVIRONMENT
LKE algorithms are used when a priori on the ob-
served environment is available. We concentrate on
algorithms which use a 3D point cloud as model. It
is built through a learning stage that associates accu-
rate 3D positions to images covering the considered
environment. Each image is also resumed in a set of
interest points with their descriptors (about 100-500
points with their SURF descriptors for each image)
and their corresponding 3D points in the scene. All
this information is saved in a database. The online lo-
calization process consists in comparing the observed
image of the scene to all images of the database using
their descriptors. The most similar image, i.e. with
the highest correlation score, should correspond to
the currently viewed scene. The camera pose is then
computed using the 3D points observed in this image.
As the covered environment grows, it becomes im-
possible to compare, in a systematic way, the query
image with all images of the database. Therefore, a
vocabulary tree structure is used to speed-up this re-
trieval step. This structure has proved to be very effi-
cient even for very large database (more than 100000
images) (Arnold et al., 2009; Nister and .Stewenius,
2006; Schindler et al., 2007). It is a hierarchical tree
(with branching factor k and l levels) storing descrip-
tors by similarity in such a way that an exhaustive
search can be done in only k ∗ l descriptor compar-
isons (done with the L1-distance). Therefore, this per-
mits a quick comparison between a descriptor from
the query image and the whole set of descriptors of the
database. In detail, for each query image, we extract
about 400 interest points with their SURF descriptors.
Our vocabulary tree has 6 levels and a branching fac-
tor of 10. Hence, for each descriptor of the query im-
age, only 60 comparisons are computed.
4 COMBINING LOCALIZATION
IN KNOWN AND UNKNOWN
ENVIRONMENTS
4.1 Overview
In this section, we describe how the algorithms pre-
sented above are combined together. The idea is to
A VISION-BASED HYBRID SYSTEM FOR REAL-TIME ACCURATE LOCALIZATION IN AN INDOOR
ENVIRONMENT
217
progressively correct the drift of the LUKE algorithm
when parts of the database are recognized in the im-
ages through the LKE algorithm. Fusion of LUKE
and LKE algorithms is difficult. The latter may not
provide data for long time interval due to unlearned
areas, lighting variation, etc. LUKE algorithm may
have drift too much in the meantime yielding in in-
consistent data. Fusion through Kalman filter requires
data covariance. However, methods that compute the
covariance of local bundle adjustment such as (Eu-
des and Lhuillier, 2009) do not take into account the
scale factor drift of monocular LUKE algorithm. The
covariance are then underestimate and deconfliction
problems (Mittu and Segaria, 2000) will probably ap-
pear.
We propose an alternative approach. Data fusion
is achieved through a drift correction module that ad-
justs the LUKE algorithm history i.e. camera poses
and 3D points used in the local bundle adjustment
only. This additional module compute a Similarity
between the poses returned by the LUKE and LKE al-
gorithms, as described in §4.2. This fusion process is
reasonable if the poses returned by the LKE algorithm
are accurate. This is not always true in practice due
to matching errors. We add a decision module to con-
trol the output of the LKE algorithm. It is composed
of a cascade of filters such as epipolar geometry, tem-
poral filtering and quality of tracking (defined by the
fraction of inliers when computing the pose through
RANSAC). If one of these filters gives a negative an-
swer, the pose is rejected and the drift correction not
performed. This ensures a false-positive rate tending
towards zero.
Finally, the LUKE and LKE algorithms are per-
formed on two different cores in parallel to keep pro-
cessing time consistent with real-time constraints. We
also propose in §4.3 a specific thread management.
It allows maintaining the same frequency than the
LUKE algorithm alone. An overview of our approach
is given in Figure 1.
4.2 Drift Correction Module
This additional module computes a Similarity
W (R
W
, T
W
, s
W
) between the poses returned by the
LUKE and LKE algorithms. A Similarity is required
due to the drift introduced by the scale ambiguity, a
simple Euclidian transformation is not enough.
The Similarity is given by:
R
W
= R
LKE
R
T
LUKE
T
W
= −R
LKE
R
T
LUKE
T
LUKE
+ T
LKE
s
W
=
T
LKE
− T
u
LKE
T
LUKE
− T
u
LUKE
,
Matching with
previous frames
Robust pose
estimation
Local Bundle
Adjustment
Keyframe
detected?
Drift Correction
Triangulation
N
Y
Thread #1: LUKE algorithm
Matching with the
Database
Robust pose
estimation
Filter out?
N
Keypoint detection
Thread #2: LKE algorithm
Stored
Database
Figure 1: Overview of the processing for one input frame.
A drift correction module is added in the LUKE algorithm.
It takes the output of the LKE algorithm to compute a Sim-
ilarity. LUKE and LKE algorithms are performed on two
different cores in parallel.
where (R
LKE
, T
LKE
) and (R
LUKE
, T
LUKE
) are the current
poses returned by the LKE and LUKE algorithms re-
spectively. T
u
LKE
and T
u
LUKE
are respectively the posi-
tions of the camera returned by the LKE and LUKE
algorithms when the scale was lastly updated.
This Simarity is only applied to the cameras and
the 3D points considered in the local bundle adjust-
ment
2
. For example, updated a camera pose is given
by:
R
LUKE
← R
W
R
LUKE
T
LUKE
← s
W
R
W
(T
LUKE
− T
u
LUKE
) + R
W
T
u
LUKE
+ T
W
.
Time interval between two consecutive localization of
the LKE algorithm may be long. Camera poses re-
turned by the LUKE algorithm are then not all cor-
rected. However, for our application, i.e. real-time
localization of security troupes in a building, we are
only interested in the current position of the Secu-
rity Officer. It is also essential to propagate the
drift correction to accurately estimate his future posi-
tions. This is achieved automatically with our fusion
scheme during the LUKE process.
4.3 Parallel Computing
As described above, we opt for parallel computing to
keep processing time consistent with real-time. The
proposed framework described in §4.1 implies the
drift correction module to wait the poses from the
2
As in (Mouragnon et al., 2006) we use the cameras as-
sociated to the last three key-frames, the 3D points observed
by these cameras and the other cameras observing these 3D
points.
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
218
LUKE and LKE algorithms, as seen on figure 1. The
problem is that computing a pose with the LKE algo-
rithm is quite time consuming. The reasons are:
• Matching with the database generally requires
more comparisons for each descriptor than tem-
porally matching.
• Additional processes are essential to verify the
consistency of the computed pose.
We propose a specific way to manage the threads
based on the key-frame property of (Mouragnon et al.,
2006). Our thread management is described below
and summarized in table 1. The main steps are the
following: the LKE algorithm (thread 2) tries to lo-
calize the key-frame n until a new one (n + 1) is la-
beled by the LUKE algorithm (thread 1). If the pro-
cess of the LKE algorithm is finished before the next
key-frame (n + 1), thread 2 is ordered to sleep. At
key-frame n + 1, if the LKE algorithm successfully
localizes the key-frame n, the correction module com-
putes the Similarity W . Thread 2 is finally waked up
and the associated LKE algorithm tries to localize the
key-frame n + 1. Note that if a new key-frame is la-
beled before localization through LKE algorithm is
finished then thread 2 is stopped, the Similarity is not
computed on this key-frame.
This procedure allows keeping the frequency of
the LUKE algorithm alone. It introduces an unno-
ticeably time delay in the drift correction since the
Similarity computed for key-frame n is applied when
key-frame n + 1 is labeled.
5 EXPERIMENTAL RESULTS
We use a low-cost IEEE1394 GUPPY camera provid-
ing gray-level images with 640x480 resolution at 30
frames per second. Two video sequences (sequence
1 and sequence 2) have been acquired along walk-
ing trips though different rooms and corridors. The
covered distances are about 90m for both sequences.
Note that this kind of environment is quite texture-
less compared to outdoor urban environment as seen
on figure 2. Sequence 1 start in a known environment:
the two first localizations of the LKE algorithm are
used to fix the scale factor and the coordinate frames.
Sequence 2 start in an unknown environment: spe-
cific markers are then used to fix the scale factor and
the coordinate frame, as in (Davison, 2003).
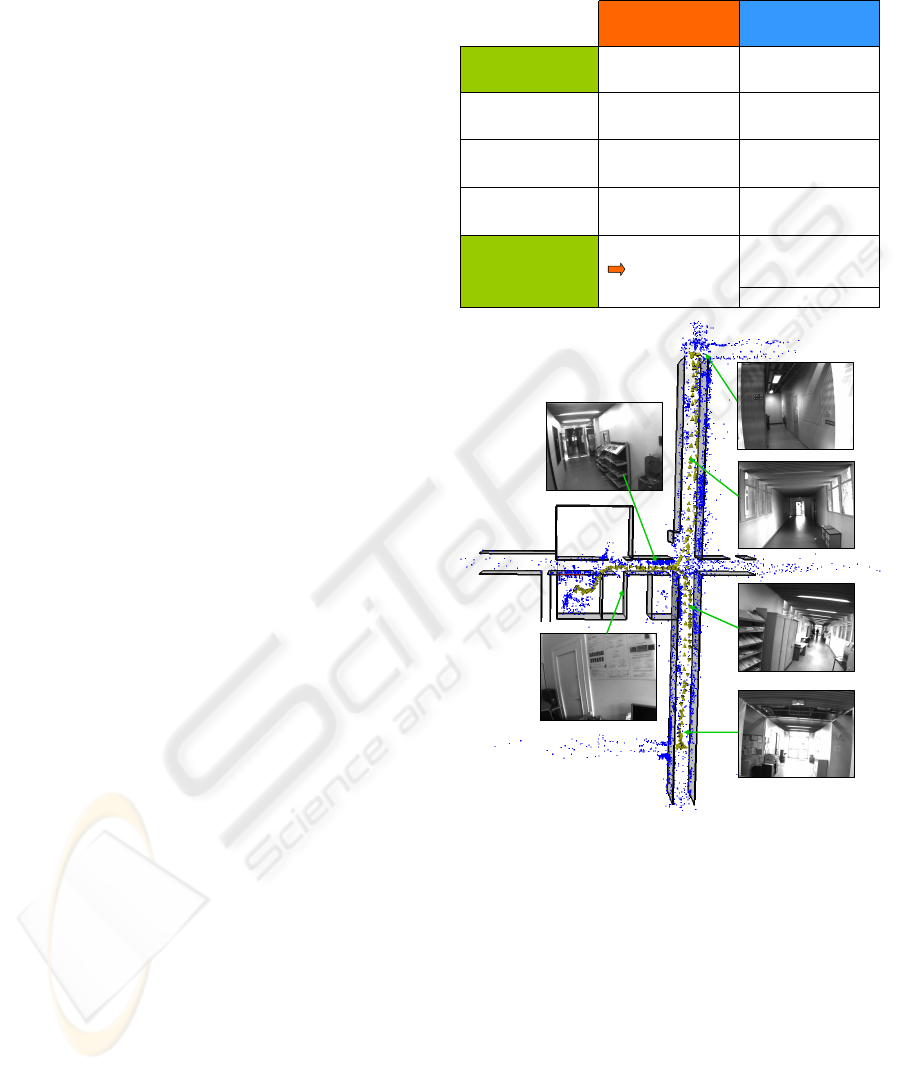
The database, represented on figure 2, has been
acquired one and two month before compare to se-
quence 2 and 1 repectively. It is composed of 6374
3D points provided by the LUKE algorithm. We
use the post-processing procedure described in (Lothe
Table 1: Thread management. Only the communications
with thread 2 are reported for thread 1.
Sleep
Localization on key-frame n+1
- Localization through LKE
algorithm is successful:
The Similarity is computed
and the drift corrected
Key-frame n+1
(frame j+4)
Sleep
frame j+3
Localization process is
finished
frame j+2
Localization on key-frame n
frame j+1
Localization on key-frame n
Start Thread 2
Key-frame n
(frame j)
Thread 2
(LKE)
Thread 1
(LUKE)
- Wake up thread 2
Figure 2: The database used for the LKE algorithm. This
Structure from Motion point cloud comes from the LUKE
algorithm. The drift is a posteriori corrected with the pro-
cedure described in (Lothe et al., 2009).
et al., 2009) which exploits a coarse CAD model of
the operating environment to correct the reconstruc-
tion drift. The ”ground truth” of the two trajectories,
represented in figures 3 and 4 (top left), are obtained
with the same procedure. Note that they differ from
the trajectory follow for buidling the database: several
offices have not been learned. Moreover, illumination
conditions have drastically changed in the meantime
(cloudy vs sunny weather, light on vs off) and objects
have disappeared and sometimes been substituted.
Figure 3 shows the results obtained with the
A VISION-BASED HYBRID SYSTEM FOR REAL-TIME ACCURATE LOCALIZATION IN AN INDOOR
ENVIRONMENT
219
R
D
R
R
1
2
3
D
A
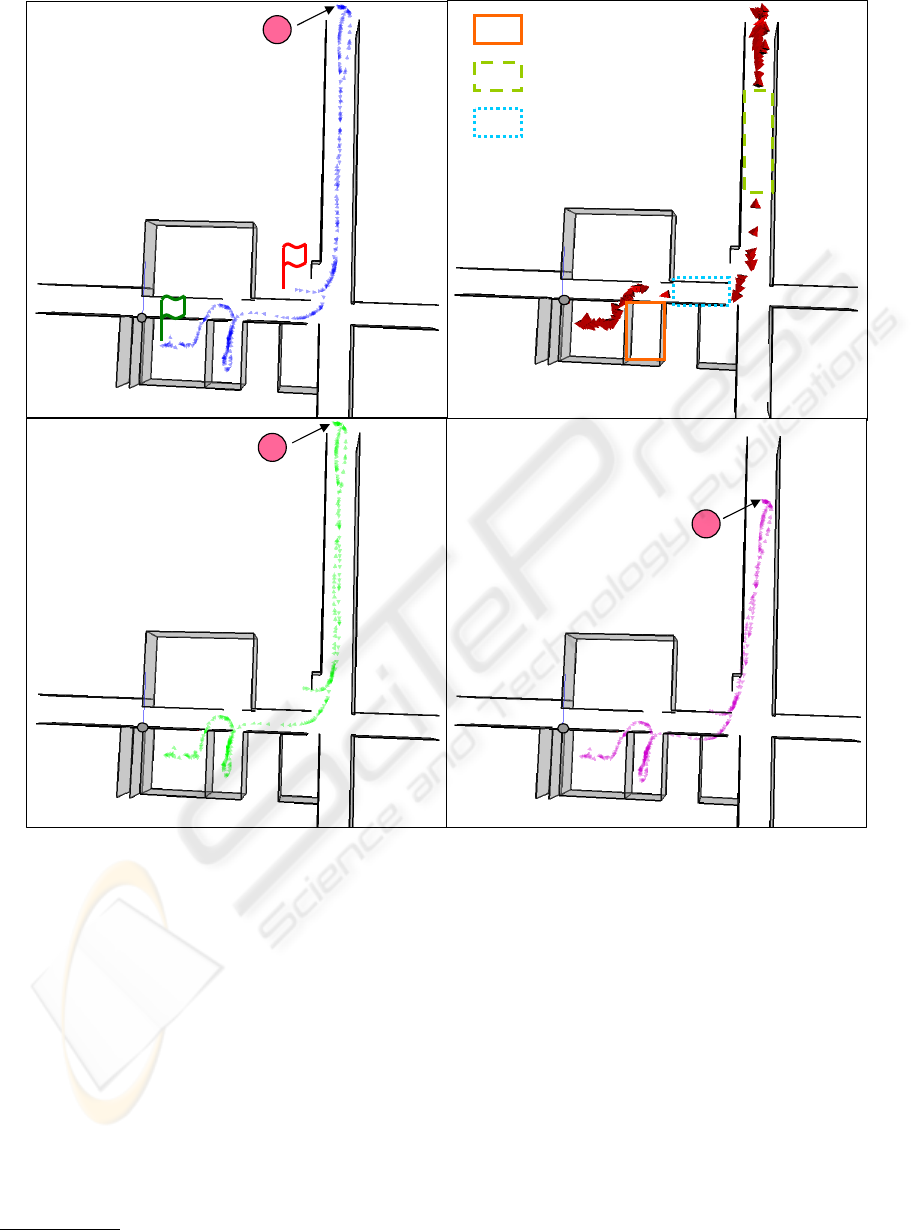
Figure 3: (top left) The trajectory follow for the first sequence: the green flag and the red flag represent the departure and the
arrival respectively. This ”ground truth” visually helps to have an idea about the drift and to roughly quantify them. (top right)
The trajectory obtained with a LKE algorithm. (bottom left) The trajectory obtained with the proposed algorithm. (bottom
right) The trajectory obtained with the LUKE algorithm described in (Mouragnon et al., 2006).
LUKE algorithm (bottom right), with the LKE algo-
rithm (top right) and with the one we propose (bottom
left) on sequence 1. The former is subject to accu-
mulation of errors. Indeed, at point R i.e. where the
drift reaches its peak, the error in position is approx-
imately 7 meters. On the other hand, some areas are
not localized with a LKE algorithm. Recognition fails
in region 2 due to lighting variations in the windows
surroundings and in region 3 since notice boards have
changed in the meantime
3
. Recognition is also im-
possible in unlearned areas such as region 1. The pro-
3
Regions 1, 2 and 3 are illustrated on figure 2.
posed system compensates for the drawbacks of the
two above algorithms. It results in a ”dense” local-
ization with a limited drift. The obtained trajectory is
closed to the ground truth since the maximum error in
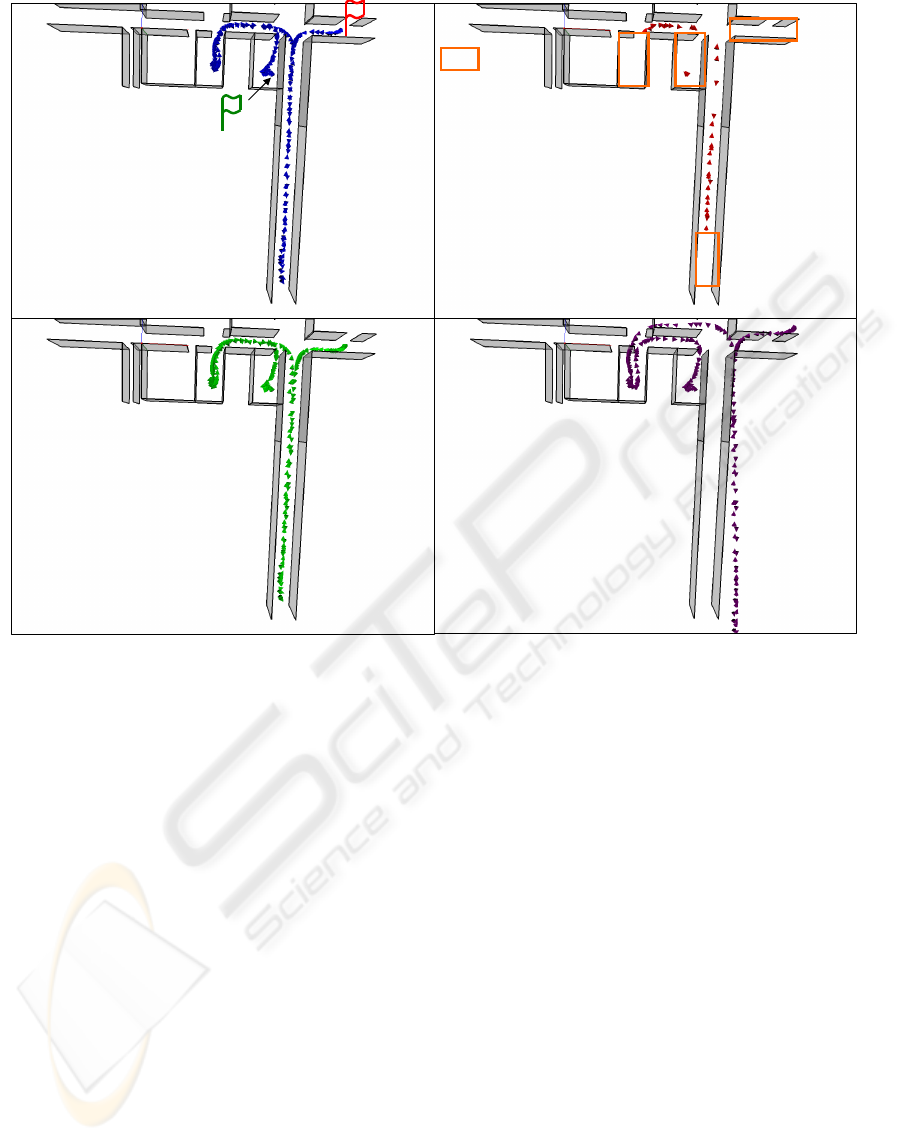
position is around 1 meter. Same conclusions are ob-
tained on sequence 2. LUKE algorithm suffers from
an important drift in the trajectory estimation while
the localization returned by the LKE algorithm is very
sparse due to several unknown areas (region 1). The
proposed hybrid algorithm yields in a trajectory very
closed to the ground trouth.
Finally, parallel computing with our specific
thread management allows keeping the same frame
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
220
1
D
A
Figure 4: (top left) The trajectory follow for the second sequence (”ground truth”): the green flag and the red flag represent
the departure and the arrival respectively. (top right) The trajectory obtained with a LKE algorithm. The two first poses,
estimated with the specific markers, are also represented (bottom left). The trajectory obtained with the proposed algorithm.
(bottom right) The trajectory obtained with the LUKE algorithm described in (Mouragnon et al., 2006).
rate as the LUKE algorithm alone. The mean frame
rate on the two sequences is approximately 39 fps on
a Pentium IV dual-core 3GHz.
6 CONCLUSIONS AND FURTHER
WORK
We have presented a new system for indoor local-
ization using two reliable and complementary meth-
ods: the absolute approach (LKE) and the relative one
(LUKE). Experimental results have shown its ability
to provide real-time accurate user localization in in-
door environment. Further Work will studied the fu-
sion with others sensor such as inertial ones. This
additional information is useful for both LUKE and
LKE algorithms. It has been proved to improve the
robustness of LUKE algorithm and may help to filter
erroneous localization of LKE algorithms.
ACKNOWLEDGEMENTS
This work has been conducted as part of the ITEA2
EASY Interactions project and partially funded by the
French industry government.
REFERENCES
Arnold, I., Zach, C., Frahm, J., and Horst, B. (2009). From
structure-from-motion point clouds to fast location
recognition. In CVPR, Miami.
Bay, H., Ess, A., Tuytelaars, T., and Gool, L. (2008). Surf:
Speeded up robust features. CVIU, 110(3):346–359.
Brusningham, D., Strauss, M., Floyd, J., and Wheeler, B.
(1989). Orientation aid implementing the global posi-
tioning system. In NEBEC, Boston.
Davison, A. (2003). Real-time simultaneous localisation
and mapping with a single camera. In ICCV, Nice.
Eudes, A. and Lhuillier, M. (2009). Error propagations for
local bundle adjustment. In CVPR, Miami.
A VISION-BASED HYBRID SYSTEM FOR REAL-TIME ACCURATE LOCALIZATION IN AN INDOOR
ENVIRONMENT
221

Hahnel, D., Burgard, W., Fox, D., Fishkin, K., and Phili-
pose, M. (2004). Mapping and localization with rfid
technology. In ICRA, New Orleans.
Harris, C. and Stephens, M. (1988). A combined corner and
edge detector. In AVC, Manchester.
Klein, G. and Murray, D. (2007). Parallel tracking and map-
ping for small ar workspaces. In ISMAR, Nara.
Lothe, P., Bourgeois, S., Dekeyser, F., Royer, E., and
Dhome, M. (2009). Towards geographical referencing
of monocular slam reconstruction using 3d city mod-
els: Application to real-time accurate vision-based lo-
calization. In CVPR, Miami.
Mittu, R. and Segaria, F. (2000). Common operational pic-
ture (cop) and common tactical picture (ctp) manage-
ment via a consistent networked information stream
(cnis). In ICCRTS.
Mouragnon, E., Lhuillier, M., Dhome, M., Dekeyser, F.,
and Sayd, P. (2006). Real-time localization and 3d
reconstruction. In CVPR, New-York.
Nister, D., Naroditsky, O., and Bergen, J. (2004). Visual
odometry. In CVPR, Washington.
Nister, D. and .Stewenius, H. (2006). Scalable recognition
with a vocabulary tree. In CVPR, New-York.
Ocana, M., Bergasa, L., Sotelo, M., Nuevo, J., and Flores,
R. (2005). Indoor robot localization system using wifi
signal measure and minimizing calibration effort. In
ISIE, Dubrovnik.
OKane, J. (2006). Global localization using odometry. In
ICRA, Orlando.
Scaramuzza, D., Fraundorfer, F., Pollefeys, M., and Sieg-
wart, R. (2009). Absolute scale in structure from mo-
tion from a single vehicle mounted camera by exploit-
ing nonholonomic constraints. In ICCV, Kyoto.
Schindler, G., Brown, M., and Szeliski, R. (2007). City-
scale location recognition. In CVPR, Minneapolis.
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
222
