
GPU-ACCELERATED IMAGE RETEXTURING
IN GRADIENT DOMAIN
Ping Li, Hanqiu Sun
Department of Computer Science & Engineering, CUHK, Hong Kong
Jianbing Shen
School of Computer Science & Technology, BIT, Beijing, China
Keywords: Image-based Rendering, Non-local Means Filtering, High Dynamic Range Image.
Abstract: This paper presents the novel GPU-accelated image retexturing approach for both high and low dynamic
range images using our newly invented fast NLM filtering. Integrating the fast Maclaurin polynomial kernel
filter and the latest GPU-CUDA acceleration, our approach is able to produce real-time high quality
retexturing for objects of the interest, while preserving the original shading and similar texture distortion.
We apply our revised NLM filtering to the initial depth map to ensure smoothed depth field for retexturing.
Our approach using GPU-based fast NLM filtering is designed in parallel, and easy to develop on latest
GPUs. Our testing results have shown the efficiency and satisfactory performance using our approach.
1 INTRODUCTION
Image retexturing is an image processing method
which takes a single image as input and gives a
totally different texture appearance to the objects of
interest in the images. The essential process is to
replace existing textures in region of interest by new
textures, while preserving the original shading and
similar texture distortion (Guo et al., 2005). 2D
textures are usually applied to represent surface
appearances without modelling geometric details.
However, manual design of textures is still a tedious
task. With the great demand from industry such as
movie and game producing, image-based techniques
in such application are becoming popular, thus
important to retexture objects directly in image
space. There are texture editing methods proposed
(Fang and Hart, 2006; Tsin et al., 2001), however,
few of them can replace the texture with just a single
image, and most methods deal with LDR images.
Khan et al. (2006) proposed a novel HDR image-
based material editing method for making objects’
textures transparent and translucent. One limitation
of the approach is the slow processing time, due to
time-consuming bilateral filtering. It is important to
develop efficient approaches for retexturing both
HDR and LDR images.
In this paper, we propose the novel image
retexturing approach by extracting a region of
interest from a single image. Rather than relying on
tedious user interactions, we utilize the spectral
matting strategy (Levin et al., 2008). Alpha matte
automatically identifies the object by minimizing a
quadratic energy function, and retexturing results are
achieved by transferring new textures to the target
object (see Figure 1). In particular, we present
revised fast NLM filtering, and develop the
approach on GPU-CUDA platform. With simple
user interaction, our GPU-accelerated retexturing
approach achieved efficient processing, and high
quality visual effects similar to the previous work
(Fang and Hart, 2004; Khan et al., 2006).
In the remainder of this paper, we first review the
related work in Section 2. We present our image
retexturing in gradient domain in Section 3, and
describe the revised NLM filtering with GPU
acceleration in Section 4. Our experimental results
are shown in Section 5. Finally, the summary of our
work goes to Section 6.
29
Li P., Sun H. and Shen J. (2010).
GPU-ACCELERATED IMAGE RETEXTURING IN GRADIENT DOMAIN.
In Proceedings of the International Conference on Imaging Theory and Applications and International Conference on Information Visualization Theory
and Applications, pages 29-34
DOI: 10.5220/0002827400290034
Copyright
c
SciTePress

a
b
c
d
Figure 1: Our image retexturing: (a) the input image, (b-d) image retexturing results generated by us.
2 RELATED WORK
In this section, we mainly review mostly related
techniques in image filters, image/video retexturing,
and GPU-based processing.
Over years, methods are proposed to remove
noise from images. Even algorithms vary, they
basically share the same idea making use of nearby
information to do averaging. Some filters use spatial
information for image blurring such as Gaussian
filters (Lindenbaum et al., 1994), anisotropic filters
(Perona and Malik, 1990) or the rank vale filters
which sort the gray value of the neighbouring pixels
(Jäjne, 2005); some carry out the filtering in frequent
domain: the Wiener filters (Yaroslavsky, 1985) and
Butterworth filters (Gonzalez and Woods, 2008); or
by calculus of variations in spatial or frequent
domain.
Image retexturing has been fascinating lately. Oh
et al. (2001) proposed techniques to change the
shape, color and illumination of objects depicted in
images. Liu et al. (2004) introduced a user-assisted
adjustment on the regular grid of real texture and
obtained a bijective mapping between the regular
grid of texture and the deformed grid of the surface.
However, these methods require elaborate user
interactions and only suitable for regular textures.
Fang and Hart (2004, 2006) proposed a retexturing
technique based on the assumption that lighting
satisfies the Lambertian surface, and object’s macro
structure can be altered. Guo et al. (2008) proposed a
novel image/video retexturing preserving the
original shading effects. Khan et al. (2006)
suggested an image based material editing focusing
on changing objects' micro structure. Shen et al.
(2007) presented an image-based processing for tone
mapping and retexturing of HDR/LDR images.
These schemes are usually slow due to time-
consuming bilateral filtering. Thus, it’s necessary to
develop efficient retexturing approach applicable for
HDR and LDR images.
Driven by the insatiable market demand for real-
time, high-quality 3D graphics, GPU has evolved
into a highly parallel, multi-threaded, and many-core
processor with great computational horsepower in
floating-point calculation. GPU works quite well on
floating-point computation while CPU performance
ordinarily. Kazhdan and Hoppe (2008) proposed a
novel streaming multi-grid GPU solver to solve
large linear systems arising from gradient domain
image processing. McCann and Pollard (2008)
proposed a GPU-based image editing that allows
artists to paint in the gradient space with real-time
feedback on megapixel images. The reason behind
the discrepancy between CPU and GPU is that GPU
is specialized for compute-intensive, highly parallel
computation and more transistors are devoted to data
processing. Here we use GPU-CUDA platform to
accelerate our retexturing approach especially the
time-consuming filtering process.
3 IMAGE RETEXTURING
Our image retexturing approach is proposed in
gradient space using fast NLM filtering for both
HDR and LDR images, which has the following
main processing steps:
compute the luminance image in I to get an initial
depth map
;
use the revised NLM filter to get smoothed depth
map,
()
s
dd
I
FastNLM I
;
get the gradient depth map from
s
d
I
:
(, )
g
Ixy
;
compute the texture coordinate
(, )
xy
uu
according to
the gradient depth map
(, )
g
Ixy
;
derive the new color gradient
(, )
new
g
Ixy
from
(, )
g
Ixy
and the input texture gradient
g
T
;
reconstruct the final image from
(, )
new
g
I
xy
by solving
Poisson equation.
3.1 Gradient Depth Recovery
Given the revised NLM filtering, the general
retexturing method we adopt is to acquire an image
of the object of interest as input, create an alpha
IMAGAPP 2010 - International Conference on Imaging Theory and Applications
30

matte to separate the object from the background. By
aligning our image manipulation with the object’s
boundaries, the pixels forming the object are altered
to fit the object with new textures.
Computing a depth map from a single image is
the classic shape from shading problem. Since it is a
severely under-constrained problem (Horn and
Brooks, 1989), good solution for arbitrary images do
not exist and few general solutions can faithfully
compute the depth information. Our method derives
a locally consistent depth map from the luminance
distribution of an object, where higher luminance
values specify the parts of the object closer to the
observer. Similar with khan et al. (2006), an initial
depth map is computed as:
(, ) (, )
dlumi
I
xy I xy
We use our revised NLM filtering to get the
smoothed depth map
()
s
dd
I FastNLM I
. Then, the
filtered depth map
s
d
I
is used to estimate and find
the local gradient depth map. The final recovered
gradient depth map
(, )
g
Ixy
is defined in terms of
neighbouring depth values, as follows:
(, ) ( (, ), (, ))
xy
ggg
I
xy I xy I xy
The final gradient information is directly used to
warp the input textures with the image-based models
to achieve image retexturing. Even the depth map
we compute may not be precise in the reconstructed
map, this don’t affect the high-quality retexturing
visual effect in our experimental results.
3.2 Retexturing in Gradient Space
Generally, the gradient space
(, )
g
Ixy
is sufficient
for estimating the warping of an arbitrary texture,
and can be used to retexture the object of interest.
We use the lazy snapping (Li et al., 2004) to
segment the object in the region of interest. We
introduce two linear scale factors
x
v
,
y
v
, and use
linear combination of gradient value and 2D spatial
indices to calculate the texture coordinates
(, )
x
y
uu
:
x
x
x
xg
yyg
uxvI
uyvI
Considering a pixel
(, )
x
y
belonging to the
object with a
R
GB
color gradient
(, )
g
Ixy
, we
derive the new color gradient
(, )
new
g
I
xy
from its
original color gradient
(, )
g
Ixy
and the input
texture gradient
(, )
gxy
Tuu
using the matting equa-
tion as:
(, ) (, ) (1 ) ( , )
new
gg gxy
I
xy s I xy s T u u
Where
s is a scalar parameter that linearly
interpolates between the original object color
gradient and the texture color gradient. With the new
retextured gradient
(, )
new
g
I
xy
, we can get the
retextured image by solving a Poisson equation
(Perez et al., 2003). Our efficient retexturing
approach produces high-quality visual results of
image retexturing, also with much less time cost
using GPU-CUDA acceleration compared with the
previous work.
4 FAST NLM FILTERING
In our approach, we develop the real-time NLM
filtering to manipulate gradient space, convert the
gradient domain into approximate geometry details
for retexturing in image space.
4.1 Revisited Kernel Filter
The weighting functions used in (Choudhury and
Tumblin, 2003) are standard Gaussian kernel. Let
/
x
t
, the original Gaussian kernel is:
2
2
()
x
Gx e
If we take
2
x
as input, there are one division, one
minus and one exponent operation in the original
Gaussian kernel. Exponent operation is very
computationally expensive. We need to develop
approximation functions (Chatterjee & Milanfar,
2008) that don’t involve exponent operation to
reduce the cost of operations.
Maclaurin series is a famous continuous function
approximation rule, a Taylor expansion about zero.
We use Maclaurin series to develop an exponent-
free fast Maclaurin kernel as:
2
2
2
2
384
() ,
64
12
m
ax
Gx
ba
ba
Taking
2
x
as input, the evaluation of
()
m
Gx
in this
form consists of three multiplication, one division
and three addition operations. Computational power
is saved since there are only simple floating-point
operations. Maclaurin series is one of the best math-
proved approximation rules, thus the new kernel is
very close to the original Gaussian kernel, we can
surely use our fast Maclaurin kernel filter to appro-
GPU-ACCELERATED IMAGE RETEXTURING IN GRADIENT DOMAIN
31
ximate the original Gaussian kernel.
4.2 Simplified NLM Filter
The non-local means filter recently proposed by
Buades et al. (2006) is a tremendous improvement
for the neighbourhood filters (Smith and Brady,
1997). The NLM filter can be represented as:
() (, ) ()
f
ux w xy f ydy
with the weighting coefficient in the form:
2
2
2
2
(,)
(,)
(, )
f
f
dxy
h
f
dxy
h
e
wxy
edy
Different from neighbourhood filters, the NLM
filter quantifies the similarity of pixels
x
and
y
by
taking the similarity of whole
patches around. The
similarity of pixels is evaluated by a distance metric
2
(, )
f
dxy
, which contains size r of the compared
patches, and a weighting function
(, )
f
g
xy
with a
parameter h describes how fast the weight decays
with increasing dissimilarity of respective patches.
Since the similarity measure uses the information of
the whole nearby patches instead of single pixel
intensity, the NLM filtering is able to remove noise
from textured images without destroying the fine
structures of the texture itself (see Figure 2).
Using the revisited Maclaurin kernel, we further
perform algorithm simplification. Mainly we apply
the NLM filter to smooth the gradient domain, the
gradient NLM filter at pixel
x
is defined as:
1
()
()
()((,))()
mm
c
rh
ux
cx
GyxGdxy fydy
2
()
()
1
(,) (())()
()
()((,))
rh
c
bx
mm
c
cx
dxy fy x f d
sb
GyxGdxydy
Where
()
f
y
is the noisy gradient image,
()ux
is result produced by our NLM filter with the
parameters
h
and
r
, and
()
r
m
G
and
()
h
m
G
are
the kernel filters in the form of eighth order
Maclaurin function.
()cx
is the normalizing
coefficient, and
()
s
b
is the area of b . Here,
2
c
d
represents the normalized sum of absolute gradient
differences between blocks around pixel
x
and
y
.
4.3 GPU-accelerated Retexturing
Recently the traditional neighbourhood filters can
run in real time even without hardware acceleration.
But, it is not the case with the NLM filter. We notice
that the latest OpenGL or DirectX hardware allows
high quality filters for even high resolution images.
With the help of latest NVIDIA GPU, we can
benefit from using a general purpose programming
model CUDA. Features such as shared memory and
sync points combined together with flexible thread
control allow us to speed up algorithms in parallel.
a
b
d
c
Figure 2: Filtering quality: (a) the initial gradient depth, (b)
enlarged detail, (c) KNN filtering result, (d) smoothed
result using our revised NLM filtering.
For GPU-CUDA coding, we define
()bx
be the
spatial neighbourhood of a certain size surrounding
pixel
x
. We consider it as a block of pixels in the
size
ll
, where
21lr
, thus
x
is the center of
()bx
, the block radius is r . For every pixel
2
n
number of weights need to be counted, where
21nm
; To calculate each weight
2
k
number of
weights need to be counted, where
21ki
, texture
fetches are performed here to compute the
2
(, )
c
dxy
function. The total
22
nk
number of texture fetches is
needed, so reducing the number of texture fetches
highly increase the performance.
To achieve the reduction of texture fetches, we
assume that within each block weights do not
change. We compute weights for the pixels in center,
and use these weights as the convolution coefficients
for other pixels within the same block. In this way,
we are able to reduce the number of texture fetches
to
2
k
. For the most common value
5n
for the
blocks, we can reduce 25 times less texture fetches.
The assumption that weights are uniform within the
block works well, and most of the revised NLM
filter smoothed areas have little visual difference
IMAGAPP 2010 - International Conference on Imaging Theory and Applications
32

Figure 3: Top line - LDR image retexturing of the decorated cup using our approach; lower line - HDR image retexturing of
the artwork using our approach, in which the left-most is the original image.
from the NLM filter. With the fast Maclaurin kernel
filter we develop, the revised NLM filter works
much faster than the traditional NLM processing.
5 RETEXTURING RESULTS
We used C with NVIDIA CUDA programming and
MATLAB to implement our GPU-accelerated image
retexturing. The samples shown in the paper have
been tested on an Intel(R) Core(TM)2 Duo CPU
2.3GHz PC with a NVIDIA GeForce 8800 GPU and
2GB RAM. We have compared the revised NLM
filtering with bilateral filtering, K-nearest neighbors
filtering and the NLM filtering, in which the filters
tested are implemented in parallel with GPU
acceleration. The resolutions of sample images we
tested are in the range from 50×50 to 1600×1600.
From the tests, our approach using GPU acceleration
can perform more than twice as fast as the NLM
filtering. The computational performance statistics
for GPU-based filtering is listed in Table 1. Even the
GPU KNN filter is somehow faster than our revised
NLM filter, it is shown in Figure 2 that the filtering
quality of KNN is not satisfied as ours.
Table 1: Timing performance (frame/second) for GPU
filters of KNN, bilateral, NLM and our fast NLM filter in
relation to image sizes.
GPU Filters 50×50 200×200 800×800 1600×1600
KNN 1372.3 986.3 178.7 49.7
Bilateral 783.6 108.5 32.6 12.6
NLM 651.9 91.6 6.5 1.6
Our fast NLM 1353.8 886.9 132.2 35.7
Figure 4 shows our texture distortion effect of
sculpture retexturing in comparison with previous
work, where the retextured distortion effect of our
result comparable to the synthesis method of Fang
and Hart (2004). Both generate good distortion
effect conforming to the image underlying geometry.
In Guo et al. (2008), user needs to perform
considerable mesh stretches to deform new texture
conforming to the image geometry. Since we
perform image retexturing in gradient space, our
approach is able to replace the existing textures in
the region of interest, while preserving the original
shading and similar texture distortion using the
gradient difference info and simple user interaction
(i.e. tuning one/two parameters).
More retexturing results are shown in Figure 3
and Figure 5, which showed the impressive visual
effects with real-time performance and simple user
interaction, including HDR image retexturing
(artwork) and LDR image retexturing (decorated cup,
fruits, cloth, sculpture) examples. Our approach can
be applied to both HDR and LDR images, uniformly.
When using HDR display (Hoefflinger, 2007), the
visual effects look much better as the high dynamic
range to manipulate for the light intensity.
a
b
c
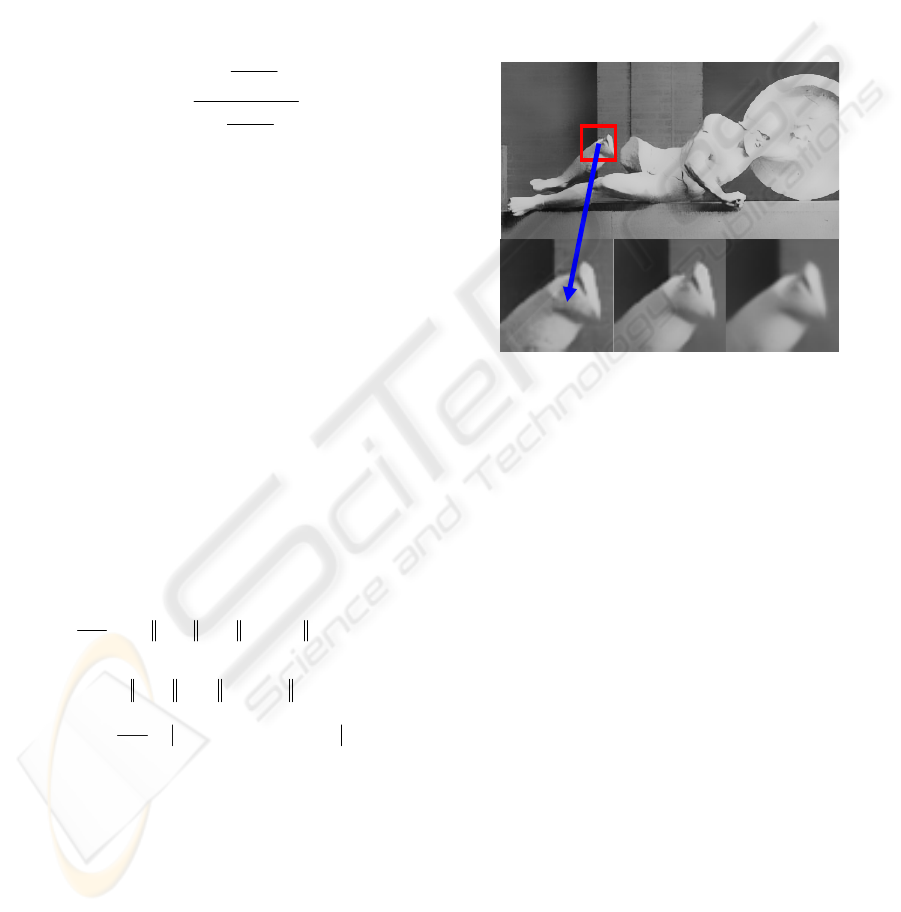
Figure 4: Texture distortion effect: The input image is the
inset in (c), (a) is our result, (b) is the result of Guo et al.
(2008) and (c) is the result of Fang and Hart (2004).
6 SUMMARY
In this paper, we present the novel GPU-accelerated
image retexturing using our revised NLM filtering
for both HDR and LDR images. Integrating the fast
Maclaurin kernel filter and parallel GPU-CUDA
acceleration, our approach is able to produce real-
time realistic results of image retexturing with
simple user interactions (i.e. tuning one/two parame-
GPU-ACCELERATED IMAGE RETEXTURING IN GRADIENT DOMAIN
33

Figure 5: Top line - LDR fruits retexturing using our approach; lower line - LDR cloth retexturing (left) and LDR sculpture
retexturing (right) using our approach.
ters). Using the smoothed depth map in gradient
space, the reconstructed map provides the
retexturing visual qualities. Our experimental results
have shown the feasibility and the efficiency of our
approach. We will further work on utilizing
geometrical properties for retexturing, and extending
the image retexturing to video applications with
better optimizations.
REFERENCES
Buades, A. and Coll, B. and Morel, J. (2006). A review of
image denoising algorithms, with a new one,
Multiscale Modeling and Simulation, 4(2), 490–530.
Chatterjee, P. and Milanfar, P. (2008). A generalization of
non-local means via kernel regression. Proc. of IS&T
Conf. on Computational Imaging VI, San Jose.
Choudhury, P. and Tumblin, J. (2003). The trilateral filter
for high contrast images and meshes. Eurographics
Symposium on Rendering ’03, 186–196.
Fang, H. and Hart, J. (2006). Rototexture: automated tools
for texturing raw video. IEEE Trans. on Visualization
and Computer Graphics, 12(6), 1580–1589.
Fang, H. and Hart, J. (2004). Textureshop: texture
synthesis as a photograph editing tool. International
Conference on Computer Graphics and Interactive
Techniques, ACM New York, 354–359.
Gonzalez, R. and Woods, R. (2008). Digital image
processing (3rd ed.). NJ: Pearson/Prentice-Hall.
Guo, Y. and Wang, J. and Zeng, X. and Xie, Z. and Sun, H.
and Peng, Q. (2005). Image and video retexturing.
Computer Animation and Virtual Worlds, 16, 451-461.
Guo, Y. and Sun, H. and Peng, Q. and Jiang, Z. (2008).
Mesh-Guided Optimized Retexturing for Image and
Video. IEEE Transactions on Visualization and
Computer Graphics, 14(2), 426–439.
Hoefflinger, B. (2007). High-dynamic-range (HDR) vision.
Berlin: Springer.
Horn, B. and Brooks, M. (1989). Shape from shading.
Mass: MIT press Cambridge.
Jäjne, B. (2005). Digital image processing, concepts
algorithms, & scientific app.. Berlin: Springer-Verlag.
Kazhdan, M. and Hoppe, H. (2008). Streaming Multigrid
for Gradient-Domain Operations on Large Images.
Proceedings of ACM SIGGRAPH 2008, 27(3).
Khan, E. and Reinhard, E. and Fleming, R. and Bulthoff,
H. (2006). Image-based material editing. Proceedings
of ACM SIGGRAPH 2006, 25(3), 654–663.
Levin, A. and Rav-Acha, A. and Lischinski, D. (2008).
Spectral matting. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 30(10), 1699–1712.
Li, Y. and Sun, J. and Tang, C. and Shum, H. (2004). Lazy
snapping. ACM Trans. Graph, 23(3), 303–308.
Lindenbaum, M. and Fischer, M. and Bruckstein, A.
(1994). On Gabor’s contribution to image
enhancement. Pattern Recognition, 27(1), 1-8.
Liu, Y. and Lin, W. and Hays, J. (2004). Near-regular
texture analysis and manipulation. Proceedings of
ACM SIGGRAPH 2004, ACM New York, 368–376.
McCann, J. and Pollard, N. (2008). Real-Time Gradient-
Domain Painting. Proceedings of ACM SIGGRAPH
2008, 27(3).
Oh, B. and Chen, M. and Dorsey, J. and Durand, F. (2001).
Image-based modeling and photo editing. Proceedings
of ACM SIGGRAPH 2001, ACM New York, 433–442.
Perez, P. and Gangnet, M. and Blake, A. (2003). Poisson
image editing, ACM Trans. Graphics,
22(3), 313–318.
Perona, P. and Malik, J. (1990). Scale-space and edge
detection using anisotropic diffusion. IEEE
Transactions on Pattern Analysis and Machine
Intelligence, 12(7), 629–639.
Shen, J. and Jin X. and Sun H. (2007). High dynamic
range image tonemapping and retexturing using fast
trilateral filtering. The Visual Computer, 23(9), 641-
650.
Smith, S. and Brady, J. (1997). SUSAN - A new approach
to low level image processing. International Journal
of Computer Vision, 23(1), 45–78.
Tsin, Y. and Liu, Y. and Ramesh, V. (2001). Texture
replacement in real images. Proc. IEEE CVPR 2001, 2,
IEEE Computer Society.
Yaroslavsky, L. (1985). Digital picture processing. Berlin:
Springer-Verlag and New York: Springer-Verlag.
IMAGAPP 2010 - International Conference on Imaging Theory and Applications
34
