
GRAPH MATCHING USING SIFT DESCRIPTORS
An Application to Pose Recovery of a Mobile Robot
Gerard Sanrom`a
a
, Ren´e Alqu´ezar
b
and Francesc Serratosa
a
a
Departament d’Enginyeria Inform`atica i Matem`atiques, URV
Av. Paisos Catalans 26, Campus Sescelades, 43007 Tarragona, Spain
b
Institut de Rob`otica i Inform`atica Industrial, CSIC-UPC
Llorens Artigas 4-6, 08028 Barcelona, Spain
Keywords:
Graph matching, SIFT, Pose recovery.
Abstract:
Image-feature matching based on Local Invariant Feature Extraction (LIFE) methods has proven to be suc-
cessful, and SIFT is one of the most effective. SIFT matching uses only local texture information to compute
the correspondences. A number of approaches have been presented aimed at enhancing the image-features
matches computed using only local information such as SIFT. What most of these approaches have in com-
mon is that they use a higher level information such as spatial arrangement of the feature points to reject a
subset of outliers. The main limitation of the outlier rejectors is that they are not able to enhance the config-
uration of matches by adding new useful ones. In the present work we propose a graph matching algorithm
aimed not only at rejecting erroneous matches but also at selecting additional useful ones. We use both the
graph structure to encode the geometrical information and the SIFT descriptors in the node’s attributes to pro-
vide local texture information. This algorithm is an ensemble of successful ideas previously reported by other
researchers. We demonstrate the effectiveness of our algorithm in a pose recovery application.
1 INTRODUCTION
Visual odometry is used in mobile robotics to measure
the spatial displacement experienced by a robot given
the images taken at each location. In many SLAM
systems it is a key point to estimate the robot trajec-
tory in open-loop (V. Ila and Andrade-Cetto, 2009),
(V. Ila and Sanfeliu, 2007), (Ila et al., 2010).
A data association between the images is needed
in order to estimate the spatial displacement of the
robot. Image feature matching based on local invari-
ant features extraction (LIFE) has proven to be suc-
cessful, and SIFT (Lowe, 2004) is one of the most
effective. In SIFT, each feature is represented by its
location and orientation on the image and a descriptor
vector retaining information relative to the local tex-
ture. Such descriptors are invariant at a certain extent
to changes in scale, rotation and illumination, mak-
ing them suitable for matching images from the same
scene under varying pose and environmental condi-
tions. Features are then associated according to the
closeness between their descriptors.
There exist a number of approaches aimed at
enhancing the data association computed using lo-
cal descriptors. Some examples are ICP (Besl and
McKay, 1992), RANSAC (Brown and Lowe, 2003)
and Graph Transformation Matching (Aguilar et al.,
2009). What all these approaches have in common is
that they use the geometrical information to reject a
subset of erroneous matches (outliers).
Graphs are general-purpose structures aimed at
representation where features are represented by
nodes and the relations between them by edges. More
in the topic of the present paper, Aguilar et al.
(Aguilar et al., 2009) have recently presented an ap-
proach to use graph-based representations to the same
end. To give some details, they build two K-nearest-
neighbour graphs with the keypoints of the two im-
ages that have been matched (i.e., edges are placed
joining a keypoint with the K nearest neighbours in
space). The non-matched keypoints are discarded so,
they begin with two isomorphic graphs. At each itera-
tion, the algorithm removes the pair of matched nodes
most structurally dissimilar and re-computes the K-nn
structure (in both graphs). The process ends when two
topologically identical graphs are obtained. Graph
Transformation Matching has been recently used for
recoverying the pose of a mobile robot from a set
249
Sanromà G., Alquézar R. and Serratosa F. (2010).
GRAPH MATCHING USING SIFT DESCRIPTORS - An Application to Pose Recovery of a Mobile Robot.
In Proceedings of the International Conference on Computer Vision Theory and Applications, pages 249-254
DOI: 10.5220/0002829702490254
Copyright
c
SciTePress

of known 2D views using epipolar geometry (Frank-
Bolton et al., 2008).
The main limitation of the outlier rejectors is that
they are unable to produce additional useful matches
different from the initial set.
In this paper we present a novel iterative graph
matching algorithm aimed at evolving an initial set
of correspondences computed with the locally based
SIFT method, to a kind of compromise between the
constraints imposed by both the SIFT descriptors and
the structural relations. Unlike the approaches de-
scribed above, our method is able of including addi-
tional useful matches (those that satisfy the new com-
bined constraints). This is the first graph matching
algorithm that we have knowledge using structural re-
lations along with SIFT descriptors.
We demonstrate the effectiveness of our method
in a pose recovery application. Our method gets less
error with more matches.
The organization of this paper is as follows: In
section 2 we introduce some preliminary concepts. In
section 3 our graph matching algorithm is presented.
In section 4 we describe the experiments discuss the
results, and in section 5 the conclusions are given.
2 PRELIMINARIES
Definition 1. A Graph G (attributed relational
graph) is a 3-tuple G = (V,E,Z) where V is a set
of vertices (also called nodes), E ⊆ V × V is a set
of edges, where e ∈ E, e = (v
i
,v
j
) is an edge joining
nodes v
i
,v
j
∈ V, and Z is a set of vectors, where z
i
∈ Z
is a vector of attributes associated to node v
i
∈ V.
Although edges may contain attributes, we focus
on the binary case where edges exist (1) or not (0).
Definition 2. A matching matrix S is a binary
matrix defining an injective mapping from a data-
graph G
D
= (V
D
,E
D
,Z
D
) to a model-graph G
M
=
(V
M
,E
M
,Z
M
). Hence, an element s
ij
∈ S is set to 1
if node v
i
∈ V
D
is matched to node v
j
∈ V
M
, and 0 oth-
erwise. On the other hand, matching node v
a
∈ G
D
to
node NULL (no node) means to put the a-th row of S
to zeros.
A number of SIFT keys are extracted from an
image through the local invariant feature extraction
method described in (Lowe, 2004).
Definition 3. Each SIFT key P
i
=
X
T
i
,R
T
i
,U
T
i
T
is composed by its 2D location in the image X
i
=
(x
i
,y
i
), its gradient magnitude and orientation R
i
=
(r
i
,α
i
) and a descriptor vector of length 128, U
i
=
(u
i,1
,... ,u
i,128
) with information the local texture on
the image.
Let P
s
i
,i = 1,... ,n and P
d
j
, j = 1,... ,m be the
SIFT keys of a source and destination images, respec-
tively.
Definition 4. A SIFT key P
s
k
from the source im-
age is positively SIFT matched to a SIFT key
P
d
l
from the destination image if dist
U
s
k
,U
d
l
=
min
dist
U
s
k
,U
d
j
, j = 1,. ..,m and
dist
(
U
s
k
,U
d
l
)
dist
(
U
s
k
,U
d
l2
)
<
ρ, where dist(•) is the Euclidean distance, U
d
l2
is the
descriptor of the destination image with the second
smallest distance from U
s
k
, and 0 < ρ ≤ 1 is a ratio
value controlling the tolerance to false positives.
Let P
left
i
,i = 1, ..., n and P
right
j
, j = 1,... ,m be the
SIFT keys of a left and right images of a scene, ob-
tained with stereo-vision. Let f be a function such
that, f (i) = j means that P
left
i
is positively SIFT
matched to P
right
j
, and f (i
′
) = 0 means that P
left
i
′
is not
matched to any. Let X
3D
l
= (x
l
,y
l
,z
l
)
T
, l = 1, ...,t,
be the 3D coordinate-vectors obtained through stereo
triangulation of the local 2D coordinate-vectors X
left
k
and X
right
f(k)
, ∀k s.t. f(k) 6= 0.
Definition 5. A K-nearest-neighbour (K-nn) SIFT
graph G is a 3-tuple G = (V,E,Z), where V
is a set of nodes associated to each X
3D
l
, Z =
n
U
left
k
| f(k) 6= 0
o
, is a set of SIFT descriptor-
vectors associated to the nodes, and E is a set of edges
where for each v
i
there is an edge (v
i
,v
i
p
) that join v
i
with its K closest neighbours v
i
p
, p = 1.. .K in the
space of the coordinate-vectors X
3D
l
.
3 A NOVEL GRAPH MATCHING
ALGORITHM
Let G
D
= (V
D
,E
D
,Z
D
) and G
M
= (V
M
,E
M
,Z
M
) be a
data and a model graph, respectively. In this sec-
tion, we present an iterative graph matching algo-
rithm, aimed at driving an initial estimate of the best
matching matrix S
(1)
through the space of matching
configurations, in the direction fixed by a new set of
constraints aimed at representing a compromise be-
tween SIFT attributes and structural relations. This
algorithm is built from an ensemble of previously re-
ported ideas by other researchers (Gold and Rangara-
jan, 1996) (Luo and Hancock, 2001) (Cross and Han-
cock, 1998).
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
250

3.1 A Measure of Structural
Consistency
It is a well-known strategy to state that a match from
a node v
a
∈ V
D
to a node v
α
∈ V
M
is more likely to
occur as more nodes adjacent to v
a
are assigned to
nodes adjacent to v
α
(Luo and Hancock, 2001) (Gold
and Rangarajan, 1996).
We define a hit as a node v
b
∈ V
D
adjacent to v
a
that is matched to a node v
β
∈ V
M
adjacent to v
α
.
(Luo and Hancock, 2001) used the EM algorithm
to iteratively find the maximum likelihood estimate
of the matching matrix S. They used a probability
model based on the Bernoulli distribution in order to
accomodate hits and no hits with fixed probabilities
(1− P
e
) and P
e
(being P
e
the probability of error).
On the other hand, (Gold and Rangarajan, 1996)
proposed an iterative algorithm to solve the assign-
ment problem using graduated nonconvexity. They
used the compatibility measure between links to
gauge the hits.
Interestingly, both approaches (Luo and Hancock,
2001) and (Gold and Rangarajan, 1996) according
with their respective frameworks (i.e., Expectation-
Maximization and graduated nonconvexity) ended up
maximizing a similar expression.
We adopt the mentioned expression as our mea-
sure of structural consistency for the match v
a
→ v
α
.
This expression is
Q
aα
= exp
"
µ
∑
b∈V
D
∑
β∈V
M
D
ab
M
αβ
s
bβ
#
(1)
where D and M are the adjacency matrices of G
D
and
G
M
, respectively (i.e., D
ab
means that there is an edge
joining v
a
and v
b
; and M
αβ
means that there is an edge
joining v
α
and v
β
), s
bβ
∈ S is an element of the n ×
m current matching matrix S and µ > 0 is a control
parameter.
The presented expression is the exponential of the
number of hits for a match a → α, weighted by a pa-
rameter µ.
In (Gold and Rangarajan, 1996), µ controls the
convexity to avoid poor local minima. A high value
of µ tends to exaggerate the difference of the highest
values with respect to the others. On the other hand,
in (Luo and Hancock, 2001), µ = ln[(1− P
e
)/P
e
]. A
high value of P
e
means not to penalize too much the
structural errors. This has sense, since increasing the
value of P
e
(decreasing the value of µ) has the effect
of smoothing the differences among the values.
3.2 A Measure of Similarity between
SIFT Attributes
Up to this point, we have shown how to measure the
contribution of matching one node to another with re-
gards to the structural relations.
We propose the inverse of the distance as the mea-
sure of similarity of the SIFT attributes from two
nodes. More formally, we define the similarity of
matching node v
a
∈ V
D
to node v
α
∈ V
M
with regards
to the SIFT attributes as
R
aα
=
1
dist(z
D
a
,z
M
α
)
(2)
where dist
z
D
a
,z
M
α
is the Euclidean distance between
SIFT descriptors z
a
∈ Z
D
and z
α
∈ Z
M
.
The advantages of this measure are that we can
easily reformulate the ratio criterion of definition 4
so as to obtain the same results as the original SIFT
matching, while having turned a distance to a similar-
ity function.
3.3 A Combined Measure of
Consistency and Similarity
We propose a combined measure of the consistence
of a match inspired in the work of simultaneous
graph matching and alignment by Cross and Hancock
(Cross and Hancock, 1998). In their work, they com-
bined the structural relations with attributes informa-
tion of the 2D coordinate positions to recover both
the configuration of matches and the spatial transfor-
mation. Since the SIFT descriptors have a constant
value throughout the process, we are only interested
in recovering the correspondences.
Our combined expression for gauging the consis-
tence of matching the node v
a
∈ V
D
to node v
α
∈ V
M
is:
W
aα
= Q
aα
R
aα
(3)
where Q
aα
is the structural consistency coefficient de-
scribed in equation (1) and R
aα
is the SIFT similarity
coefficient described in equation (2).
The use of the multiplication to combine the mea-
sures due to both the local information and the sur-
rounding matches is closely related to the idea of
Probabilistic Relaxation (R.A. and W., 1983).
With this measure to hand, we define the matrix Ω
of combined coefficients as:
Ω =
W
11
... W
1m
.
.
. W
aα
.
.
.
W
n1
... W
nm
(4)
GRAPH MATCHING USING SIFT DESCRIPTORS - An Application to Pose Recovery of a Mobile Robot
251

3.4 A Cleaning Heuristic
A cleaning heuristic is needed to obtain a binary
n × m matching matrix (definition 2) S that selects
the matches corresponding to the highest coefficients
from the continuous matrix Ω. Since it may not ex-
ist an exact isomorphism between two graphs G
D
and
G
M
, we also need a criterion to match nodes v
a
∈ G
D
to NULL.
Borrowing the idea of the ratio criterion of the
positive SIFT matches, we propose the following
cleaning procedure:
1. Initialize S to an n× m matrix of zeros. Let Ω
′
=
Ω. Set all W
′
a,α
∈ Ω
′
to zero except those W
′
a,k
from each row a of Ω
′
s.t. W
′
a,k
= max
W
′
a,α
,
α = 1,.. .,m and W
′
a,k
/W
′
a,k2
>
1
ρ
, where W
′
a,k2
is
the second highest element in the a-th row of Ω
′
.
Note that we use the same ratio value 0 ≤ ρ ≤ 1
as in definition 4 to control the acceptance rate.
2. Find the maximun element W
′
a,α
∈ Ω
′
and activate
the corresponding match s
aα
∈ S
3. Set to zeros the row and column of Ω
′
where W
′
a,α
belongs to
4. Repeat steps 2-3 until Ω
′
becomes a matrix of ze-
ros
3.5 The Algorithm
Let G
D
and G
M
be two K-nn SIFT graphs obtained
from two pairs of stereo-images, with n and m nodes
respectively.
Our algorithm for matching G
D
to G
M
is the fol-
lowing:
1. Initialize the matching matrix at the first itera-
tion S
(1)
to be the result of applying the cleaning
heuristic of subsection 3.4 to the matrix of SIFT
similarity coefficients computed using equation
(2). Note that the structural information has no
influence in the computation of the initial match-
ing matrix, and that it becomes an injective set of
positive SIFT matches.
2. At iteration i, compute the n × m matrix of com-
bined coefficients Ω
(i)
as described in equations
(3) and (4)
3. Compute the n× m matching matrix S
(i+1)
apply-
ing to Ω
(i)
the cleaning heuristic described in sub-
section 3.4
4. Increment the iteration number i and repeat steps
2-4 until convergence of the matching matrix
In the next section we give further details about
the empirical behaviour shown by the present algo-
rithm with regards to the convergence.
4 EXPERIMENTS AND
DISCUSSION
We have designed a pose recoveryexperiment to eval-
uate the effectivenes of three image-featuresmatching
methods. The errors obtained estimating the displace-
ment of the robot using the matches selected by each
method are taken as a measure of effectiveness of the
method.
We have 130 stereo-image pairs taken at differ-
ent places during a mobile robot outdoor route. We
have the ground truth positions and orientations of
the robot at these places, computed with high preci-
sion using the SLAM system presented in (Ila et al.,
2010), (V. Ila and Andrade-Cetto, 2009). These 130
images are divided into two sets, the origin set and
the destination set, with 65 images each, so that one
image of the origin set is matched against one image
of the destination set (thus, we carry out 65 matching
experiments).
To summarize, for each experiment we have two
pairs of stereo-images (origin and destination) each
one with its set of SIFT keys (features). Each fea-
ture is associated to a 3D coordinate position (through
stereo-triangulation), relative to the camera of the
robot at that place. We also have the ground truth
positions and orientations of each place.
Given an association between the features at the
origin and destination places, we make an estimation
of the destination pose (position and orientation), as
described in (V. Ila and Sanfeliu, 2007).
We assume that the higher the error between the
estimated and the ground truth destination poses is,
the worse the features association is.
We have compared the approach presented in this
paper (denoted as Graph Matching with SIFT) to
SIFT matching (definition 4) (Lowe, 2004) and Graph
Transformation Matching (Aguilar et al., 2009).
We have used a maximum of 80 features in each
experiment when available. This has represented
around a 50% of the total available data. The features
have been selected among the most salient (regarding
the gradient magnitude of the SIFT keys). We have
built a K-nn SIFT graph (definition 5) for each pair of
stereo-images using the values of K = 7 in the Graph
Transformation Matching method and K = 21 in our
method. The value of µ = 0.15 from equation (1) has
been used in our method (the values used in all the
methods have been carefully chosen to perform well).
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
252
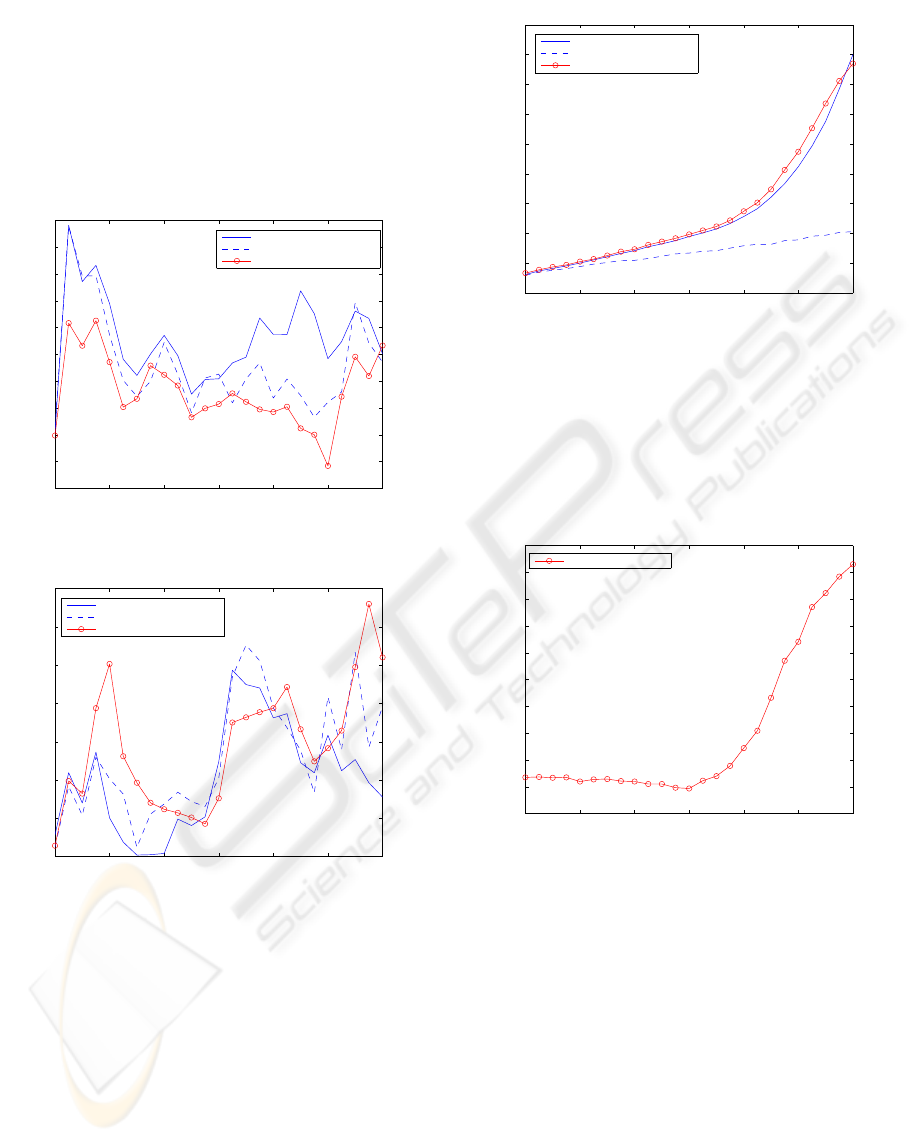
Figures 1 and 2 show the mean errors among
the 65 experiments of each method at an interval of
matching acceptance ratios ranging from 0.4 to 1. Al-
though lower ratio values often lead to less error (bet-
ter quality matches), the analysis at values lower than
0.4 has not too much interest, since a significant num-
ber of matching experiments return not enough (or not
at all) results to recover the spatial transformations.
0.4 0.5 0.6 0.7 0.8 0.9 1
10
10.5
11
11.5
12
12.5
13
13.5
14
14.5
15
ratio
Position error (meters)
Position error wrt the ratio
SIFT Matching
Graph Transformation Matching
Graph Matching with SIFT
Figure 1: Position errors w.r.t. the acceptance ratio.
0.4 0.5 0.6 0.7 0.8 0.9 1
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0.55
ratio
Angle (radians)
Orientation error wrt the ratio
SIFT Matching
Graph Transformation Matching
Graph Matching with SIFT
Figure 2: Orientation errors w.r.t. the acceptance ratio.
Figure 3 shows the mean number of matches re-
turned by each method at each acceptance ratio.
We have empirically observed two different be-
haviours with regards to the convergence of the
present algorithm. The stable case, where the match-
ing matrix reaches a certain configuration that re-
mains stable along iterations. In this case, we stop
our algorithm at the first iteration where the matching
matrix does not change. The unstable case, where the
matching matrix evolves until a point where it starts
to loop indefinitely between two different configura-
tions. In this case, we stop our algorithm and we
arbitrarily choose one of both configurations as we
consider that they are equally likely solutions. Both
0.4 0.5 0.6 0.7 0.8 0.9 1
0
5
10
15
20
25
30
35
40
45
ratio
Number of matchings
Number of matchings wrt the ratio
SIFT Matching
Graph Transformation Matching
Graph Matching with SIFT
Figure 3: Number of matches returned w.r.t. the acceptance
ratio.
cases are observed nearly in the same number of ex-
periments. Figure 4 represents the mean number of it-
erations needed by our method to stop (regarding the
mentioned criteria). The maximum number of itera-
tions permitted is 20.
0.4 0.5 0.6 0.7 0.8 0.9 1
1
2
3
4
5
6
7
8
9
10
11
ratio
number of iterations
Number of iterations of the Graph Matching with SIFT algorithm wrt the ratio
Graph Matching with SIFT
Figure 4: Number of iterations until stop.
As is shown in figure 1, the proposed approach
demonstrates to perform significantly better than the
others with regards to the position estimation, in the
database used in this experiment. On the other hand,
as we see in figure 2, orientation errors are not as good
as it would be expected. It is worth noting that the
Graph Transformation Matching method also experi-
ments a performance decreasing with respect to SIFT
matching in orientation recovery. We need to further
study this fact, since both approaches are aimed at the
improvement of the SIFT matching. Figure 3 show
evidences that our method is not only supposed to re-
move outliers, but also to introduce additional use-
ful matches. It can be observed that, while the pos-
itive SIFT matches added above an acceptance ratio
of 0.65 (≈ 7 matches) do nothing but to deteriorate
GRAPH MATCHING USING SIFT DESCRIPTORS - An Application to Pose Recovery of a Mobile Robot
253

its efficiency, our method improves its efficiency until
a threshold of 0.9 (≈ 24 matches), where it actually
performs optimally. On the other hand, it is clear that
the enhancement introduced by the Graph Transfor-
mation Matching is, as expected, based on the rejec-
tion of the SIFT outliers.
5 CONCLUSIONS
We have presented a new attributed graph matching
algorithm that combines the local texture information
of the SIFT descriptors with the higher level informa-
tion of the graph structure to derive a set of matches.
Unlike the SIFT enhancements based on outlier rejec-
tion, our approach aims to both eliminate erroneous
matches and add new useful ones. We have evaluated
three different approaches to image-feature matching
in a pose recovery application: our method, SIFT
matching (Lowe, 2004), and a graph-based outlier re-
jector run on the positive SIFT matches (Aguilar et al.,
2009). In the methods that use graphs, we have used
the 3-Dimensional positional information attached to
each feature to build the K-nn SIFT graphs.
In the position estimation experiments, our ap-
proach has been superior than the others. With a
higher number of correspondences than SIFT match-
ing, our method gets even a lower positional error
than the outlier rejector. In conclusion, our method
gets more and better matches.
On the other hand, both our method and the outlier
rejector perform worse than SIFT matching in orien-
tation recovery. This seems contradictory since both
methods are designed as an enhancement of SIFT
matching. We therefore need to further study this fact.
ACKNOWLEDGEMENTS
We want to acknowledge Juan Andrade-Cetto and
Viorela Ila for providing us with the stereo images
from the robot route, the code for triangulating the
3D feature positions and the ground truth poses used
to compute the errors.
This research was partially supported by Con-
solider Ingenio 2010, project CSD2007-00018, by the
CICYT project DPI 2007-61452 and by the Universi-
tat Rovira i Virgili.
REFERENCES
Aguilar, W., Frauel, Y., Escolano, F., and Martinez-Perez,
M. E. (2009). A robust graph transformation match-
ing for non-rigid registration. Image and Vision Com-
puting, 27:897–910.
Besl, P. J. and McKay, N. D. (1992). A method for regis-
tration of 3-d shapes. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 14(2).
Brown, M. and Lowe, D. G. (2003). Recognising panora-
mas. Proceedings of the International Conference on
Computer Vision.
Cross, A. D. J. and Hancock, E. R. (1998). Graph matching
with a dual-step em algorithm. IEEE Transactions on
Pattern Analysis and Machine Intelligence, 20(11).
Frank-Bolton, P., Alvarado-Gonzalez, A. M., Aguilar, W.,
and Frauel, Y. (2008). Vision based localization for
mobile robots using a set of known views. In Pro-
ceedings of Advances in Visual Computing (LNCS),
volume 5358 of 4th International Symposium on Vi-
sual Computing, pages 195–204.
Gold, S. and Rangarajan, A. (1996). A graduated assign-
ment algorithm for graph matching. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
18(4).
Ila, V., Porta, J. M., and Andrade-Cetto, J. (2010).
Information-based compact pose slam. IEEE Trans-
actions on Robotics, 26(1). In press.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. International Journal of Com-
puter Vision, 60(2).
Luo, B. and Hancock, E. R. (2001). Structural graph match-
ing using the em algorithm and singular value decom-
position. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 23(10).
R.A., H. and W., Z. S. (1983). On the foundations of re-
laxation labeling proecesses. IEEE Transactions on
Pattern Analysis and Machine Intelligence, 5(3).
V. Ila, J. P. and Andrade-Cetto, J. (2009). Reduced state
representation in delayed state slam. In Proceedings of
the IEEE/RSJ International Conference on Intelligent
Robots and Systems, Saint Louis, pages 4919–4924.
V. Ila, J. Andrade-Cetto, R. V. and Sanfeliu, A. (2007).
Vision-basedloop closing for delayed state robot map-
ping. In Proceedings of the IEEE/RSJ International
Conference on Intelligent Robots and Systems, San
Diego.
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
254
