
ON THE POTENTIAL OF ACTIVITY RELATED RECOGNITION
A. Drosou
1,2
, K. Moustakas
1
, D. Ioannidis
1
and D. Tzovaras
1
1
Informatics and Telematics Institute, P.O. Box 361, 57001 Thermi-Thessaloniki, Greece
2
Imperial College London, SW7 2AZ, London, U.K.
Keywords:
Biometric authentication, Biometrics, Activity recognition, Motion analysis, Body tracking, Hidden
Markov models, HMM.
Abstract:
This paper proposes an innovative activity related authentication method for ambient intelligence environ-
ments, based on Hidden Markov Models (HMM). The biometric signature of the user is extracted, throughout
the performance of a couple of common, every-day office activities. Specifically, the behavioral response of
the user, stimuli related to an office scenario, such as the case of a phone conversation and the interaction
with a keyboard panel is examined. The motion based, activity related, biometric features that correspond to
the dynamic interaction with objects that exist in the surrounding environment are extracted in the enrollment
phase and are used to train an HMM. The authentication potential of the proposed biometric features has
been seen to be very high in the performed experiments. Moreover, the combination of the results of these
two activities further increases the authentication rate. Extensive experiments carried out on the proprietary
ACTIBIO-database verify this potential of activity related authentication within the proposed scheme.
1 INTRODUCTION
It is well-known that biometrics can be a powerful
cue for reliable automatic person identification and
authentication. As a result, biometrics have recently
gained significant attention from researchers, while
they have been rapidly developed for various com-
mercial applications ranging from surveillance and
access control against potential impostors to smart
interfaces. However, established physical biometric
(Jain et al., 2004) identification techniques like finger-
prints, palm geometry, retina and iris, and facial char-
acteristics demonstrate a very restricted applicability
to controlled environments. Thus, behavioral bio-
metric characteristics (Jain et al., 2004), using shape
based activity signals (gestures, gait, full body and
limb motion), of individuals as a means to recognize
or authenticate their identity have come into play.
1.1 Current Approaches
Emerging biometrics can potentially allow the non-
stop (on-the-move) authentication or even identifica-
tion in an unobtrusive and transparent manner to the
subject and become part of an ambient intelligence
environment. Previous work on human identifica-
tion using activity-related signals can be mainly di-
vided in two main categories. a) sensor-based recog-
nition (Junker et al., 2004) and b) vision-based recog-
nition. Recently, research trends have been moving
towards the second category, due to the obtrusiveness
of sensor-based recognition approaches.
Additionally, recent work and efforts on human
recognition have shown that the human behavior (e.g.
extraction of facial dynamics features) and motion
(e.g. human body shape dynamics during gait), when
considering activity-related signals, provide the po-
tential of continuous authentication for discriminating
people ((Ioannidis et al., 2007),(Boulgouris and Chi,
2007) and (Kale et al., 2002)).
Some first attempts that showed the potential of
video-based recognition according to the face dynam-
ics are usually categorized as follows: a) in the holis-
tic method(displacements or the pose evolution) (Li
et al., 2001). b)in the feature-based method (Chen
et al., 2001), c) in the hybrid methods (Colmenarez
et al., 1999) and d) in probabilistic frameworks (Liu
and Chen, 2003). he most known example of activity-
related biometrics is gait recognition (Boulgouris and
Chi, 2007). On the other hand, shape identification
using behavioral activity signals has recently started
to attract the attention of the research community. Be-
havioral biometrics are related to specific actions and
the way that each person executes them.
Earlier, in ((Kale et al., 2002) & (Bobick and
Davis, 2001)) person recognition has been carried out
340
Drosou A., Moustakas K., Ioannidis D. and Tzovaras D. (2010).
ON THE POTENTIAL OF ACTIVITY RELATED RECOGNITION.
In Proceedings of the International Conference on Computer Vision Theory and Applications, pages 340-348
DOI: 10.5220/0002832703400348
Copyright
c
SciTePress

using shape-based activity signals, while in (Bobick
and Johnson, 2001), a method for human identifica-
tion using static, activity-specific parameters was pre-
sented.
1.2 Motivation - The Proposed
Approach
As a version of a multi-model concept for human au-
thentication, a highly novel, innovative visual-based
approach of a multi-activity scheme is proposed in
the current work. Activity-related biometric features
and the potential they show to increase the overall per-
formance of an unobtrusive biometric system and to
emerge the development of new algorithms for human
recognition based on their daily activities, are investi-
gated in the proposed framework.
The novelty of the approach lies in the fact that
the measurements used for authentication will corre-
spond to the response of the person to specific stim-
uli, while the biometric system is integrated in an am-
bient intelligence infrastructure. The proposed ap-
proach presents features that implicitly encode the be-
havioral and anthropometric characteristics of the in-
dividuals and is therefore proved to be extremely re-
sistive against spoofing attempts.
Further, the integration of the activity-related
identification capacities of different activities in an
ambient intelligence environment and the combina-
tion of their results towards an improved identifica-
tion possibility introduce a completely new concept
in biometric authentication.
Specifically, biometric signatures, based on the
user’s response to specific stimuli, generated by the
environment, are extracted, while the user performs
specific work-related everyday activities, with no spe-
cial protocol. Since the user is expected to remain
sit, the most interesting characteristics to provide the
biometric signature are the head and hands. The pro-
posed approach is the first step in the exploration of
such activity-related signals and their potential use in
real applications. The proposed algorithm has been
tested and evaluated in a large proprietary database.
The rest of the paper is organized as follows. In
Section 2, an overview of the proposed system is pre-
sented. The upper-body tracker as a whole and its
consisting image processing methods are described in
Section 3, while in Paragraph 4.1 the signal process-
ing methods, used to calculate final biometric signa-
ture of each user for a certain activity are briefly dis-
cussed. The Hidden Markov Model algorithm, mobi-
lized in our approach to the problem of user identi-
fication, is presented in Paragraph 3.4, while a short
description of the database used, follows in Section
5. Finally, the results of our work are presented and
thoroughly discussed in Section 6.
2 SYSTEM OVERVIEW
The overall block diagram of the system is depicted
in Figure 1. The user is expected to act with no con-
straints in an ambient intelligence office environment,
in the context of a regular day at work. Meanwhile,
some events, such as the ringing of the telephone or
an instant message for online chatting, trigger spe-
cific reaction from the user. The user’s movements
are recorded by two of cameras and the raw captured
images are processed, in order to track the user’s head
and hands. Specifically, the user’s face is detected,
based on haar-like features (Viola and Jones, 2001),
motion history images (Bobick and Davis, 2001), skin
color detection (Gomez and Morales, 2002), depth in-
formation extraction from disparity images as well as
body-metric based restrictions support analysis of the
raw pictures. The incorporation of these techniques
in the in the first step of the proposed framework will
be analyzed in the sequel.
Figure 1: System overview.
The second step involves the processing of
the tracked points acquired, so that the biometric,
activity-related features of each user are revealed.
Kalman Filtering (Welch and Bishop, 1995), followed
by spatial interpolation is mobilized so as to gener-
ate the final biometric features. In the last step the
use of continuous Hidden Markov Models (Rabiner,
1989) for the evaluation of the extracted biometric
signatures is introduced. The proposed biometric sys-
tem consists of two modes: a)The enrollment mode,
whereby a user is registered by training an HMM
from a certain number of his biometric signatures for
ON THE POTENTIAL OF ACTIVITY RELATED RECOGNITION
341

each activity. b)The authentication mode, where the
HMMs evaluate the claimed ID request by the user,
as valid or void.
The effectiveness of the proposed system is
demonstrated in Section 6 by two experiments. Ex-
periment A examines the potential of a persons au-
thentication using the biometric signature of just one
activity as the identification metric, while Experiment
B shows the authentication potential by combining
the biometric signatures from two separate activities.
3 TRACKING UPPER-BODY
The detection of the head and hand points throughout
the performed activity will be achieved with the suc-
cessive filtering out of non-important regions of the
captured scene. The methods and the algorithms mo-
bilized for that are extensively discussed below.
3.1 Face
Tracking the face tracker implemented in the current
approach is a combination of a face detection algo-
rithm, a skin color classifier and a face tracking algo-
rithm.
First, face detection is the main method that con-
firms the existence of one or more persons in the
region under surveillance. The face detection algo-
rithm, which has been implemented in our frame-
work, is based on the use of haar-like feature types
and a cascade-architecture boosting algorithm for
classification, (i.e. AdaBoost) as described in (Viola
and Jones, 2001) and in (Freund and Schapire, 1999).
In case of multiple face detection, the front-most face
(blob) is retained, utilizing the depth information pro-
vided by the stereo camera, while all others are dis-
carded. Detected facial features allow the extraction
of the location and the size of human face in arbitrary
images, while anything else is ignored.
As an enhancement to the algorithm described
above, the output of the latter is evaluated according
to a skin classifier 3.2. In case the skin color restric-
tions are met, the detected face is passed over to an
object tracker.
The face tracker, integrated in our work relies on
the idea of kernel-based tracking (i.e. the use of the
Epanechnikovkernel, as a weighting function), which
has been proposed in (Ramesh and Meer, 2000) and
later exploited and developed forward by various re-
searchers.
3.2 Skin Color Classifier
A first approach towards the locating of the palms is
achieved by the detection of all skin colored pixels on
each image. Theoretically, the only skin colored pix-
els that should remain in a regular image in the end are
the ones of the face and the ones of the hands of all
people in the image (Figure 2). Each skin color mod-
eling method defines the metric for the discrimination
between skin pixels and non-skin pixels. This metric
measures the distance (in general sense) between each
pixel’s color and a pre-defined skin tone.
The method incorporated in our work has been
based on (Gomez and Morales, 2002). The de-
cision rules followed, realize skin cluster bound-
aries of two color-spaces, namely the RGB((Skarbek
and Koschan, 1994)) and the HSV((Poynton, 1997)),
which render a very rapid classifier with high recog-
nition rates.
Figure 2: a.Original image. - b.Skin colored filtered image.
3.3 Using Depth to Enhance
Upper-body Signature Extraction
An optimized L1-norm approach is utilized in order
to estimate the disparity images captured by the stereo
Bumblebee camera of Point Gray Inc.(Scharstein and
Szeliski, 2002). The depth images acquired (Figure
3) are gray-scale images, whereas the furthest objects
are marked with darker colors while the closest ones
with brighter colors.
Figure 3: Depth disparity image.
Given that the face detection was successful, the
depth value of the head can be acquired. Any object
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
342

with a depth value greater than the one of the head can
now be discarded and thus excluded from our obser-
vation area. On the other hand, all objects in the fore-
ground, including the user’s hands, remain active. A
major contribution of this filtering is the exclusion of
all other skin colored items in the background, includ-
ing other persons or surfaces in skin tones (wooden
floor, shades, etc) and noise.
3.4 Using Motion History Images to
Enhance Upper-body Signature
Extraction
Another characteristic, which can be exploited for
isolating the hands and the head of a human, is that
they are moving parts of the image, in opposition to
the furniture, the walls, the seats and all other static
objects in the observed area. Thus, a method for ex-
tracting the moving parts in the scenery from a se-
quence of images could be of interest. For this reason,
the concept of Motion History Images (MHI) (Bobick
and Davis, 2001) was mobilized.
The MHI is a static image template, where pixel
intensity is a function of the recency of motion in a se-
quence (recently moving pixels are brighter). Recog-
nition is accomplished in a feature-based statistical
framework. Its basic capability is to represent how
(as opposed to where) motion in the image behaves
within the regions that the camera captures.
Its basic idea relies on the construction of a vector-
image, which can be matched against stored represen-
tations of known movements. A MHI H
T
is a multi-
component image representation of movement that is
used as a temporal template based upon the observed
motion. MHIs can be produced by a simple replace-
ment of successive images and a decay operator, as
described below in Eq. 1:
H
T
(x, y, t) =
(
τ, if D(x,y,t)=1
max(0, H
T
(x, y, t − 1) − 1), otherwise
(1)
The use of MHIs has been further motivated by
the fact that an observer can easily and instantly rec-
ognize moves even in extremely low resolution im-
agery with no strong features or information about
the three-dimensional structure of the scene. It is thus
obvious, that significant motion properties of actions
and the motion itself can be used for activity detection
in an image. In our case, if we set τ=2, we restrict the
motion history depicted on the image to one frame in
the past, which only concerns the most recent motion
recorded (Figure 4). In other words, a mask image is
Figure 4: Motion history image generation.
created, where all pixels are black except for the ones,
where movement last detected.
Summarizing, after having the face at least once
successfully detected (red spot), the left/right hand lo-
cation is marked with a blue/green spot on its location,
when motion and skin color and the depth criteria are
met (Figure 5). The tracking is only then complete,
when the last image of the annotated sequence has
been processed.
Figure 5: Tracked head & hands.
4 PREPROCESSING OF
EXTRACTED SIGNATURES
Once the tracking process is over, the respective raw
trajectory data is acquired. In this section the loca-
tion points of all tracked body parts (head & hands)
will be handled as a 3D signal. The block diagram of
this refinement approach can be seen in Figure 6 and
Figure 7. The refined, filtered raw data will result to
an optimized signature (Wu and Li, 2009), which will
carry all the biometric information needed for a user
to be identified.
ON THE POTENTIAL OF ACTIVITY RELATED RECOGNITION
343
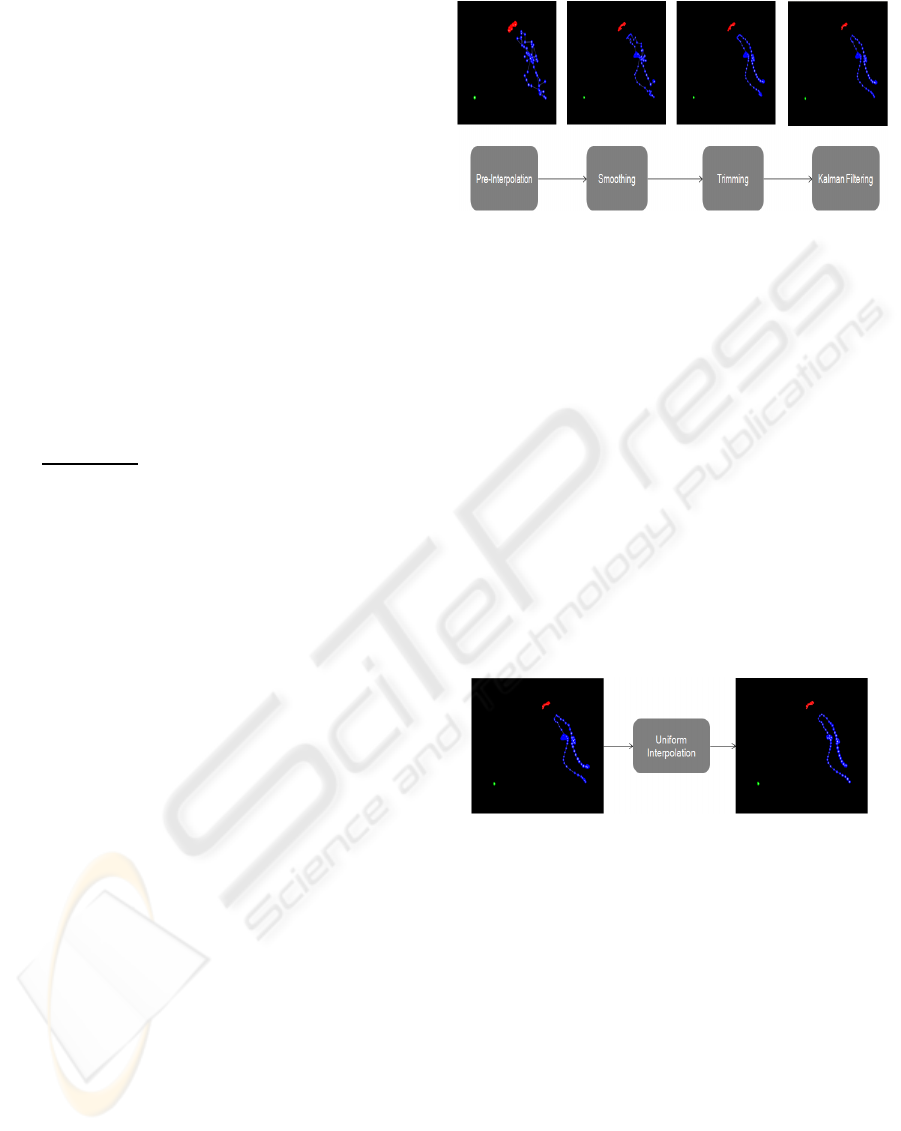
4.1 Filtering Processes
During the performance of the activity, there are some
cases whereby the user stays still. Absence of mo-
tion as well as some inaccuracies in tracking may re-
sult in the absence of hand tracking. Within the first
pre-interpolation step, the missing spots in the tracked
points are interpolated between the last -if any- and
the next -if any- valid tracked position.
The second step involves the smoothing of the 3D
signals as it is implemented by a cumulative Moving
Average method (Eq. 2). In this step short-term fluc-
tuations, just like small fluctuations or perturbations
of the exact spot of the hands due to light flickering
or rapid differentiations in the capturing frame rate of
the camera, are discarded, while longer-term move-
ments, which show the actual movement of the head
or hands, are highlighted.
CA
i
=
p
1
+ ... + p
i
i
, whereby p
i
is each tracked point
(2)
Further, the relative distances between the head and
the hands are checked and the signals are trimmed ac-
cordingly. More specifically, the distance between the
user’s head and his hands is not expected to be bigger
than a certain (normalized) value in the 3D space, due
to anthropometric restrictions. Thus, in the unusual
case of a bad tracked point, this point is substituted
by the correct one or is simply discarded.
Next, each signal x
k
undergoes a Kalman fil-
tering process (Welch and Bishop, 1995). Since
there are two points each time in the 3D images
we are observing (the head and one hand), a six-
dimensional Kalman filter is needed. The Kalman
filter is a very powerful recursive estimator, where its
stages are described by the following set of equations:
Predict:
predicted state
ˆx
k|k−1
= F
k
ˆx
k−1|k−1
predicted estimate covariance
P
k|k−1
= F
k
P
k−1|k−1
F
T
k
+ Q
k−1
Update:
updated state estimate ˆx
k|k
= ˆx
k|k−1
+ K
k
¯y
k
updated estimate covariance P
k|k
= (I − K
k
H
k
)P
k|k−1
whereby K
k
= P
k|k−1
H
T
k
(H
k
P
k|k−1
H
T
k
+ R
k
)
−
1,
¯y
k
= z
k
− H
k
ˆx
k|k−1
;
z
k
= H
k
x
k
+ v
k
;
F
k
the state-transition model; H
k
the observation
Figure 6: Signature signal processing.
model; v
k
is the observation noise; R
k
its covariance;
and Q
k
the covariance of the process noise.
Last but not least, a uniform resampling algorithm
targetting interpolation is applied on the signals (Fig-
ure 7). The uniform interpolation ensures a uniform
spatial distribution of the points in the final signa-
ture. The sampled points of the raw signature are re-
arranged, in such a way that a minimum and a maxi-
mum distance between two neighboring points is pre-
served. When necessary, virtual tracked points are
added or removed from the signature. The result is
an optimized, clean signature with a slightly different
signature data set, without loss of the initial motion
information (Wu and Li, 2009). With this, the pro-
posed signature concerns more about the description
for a continuous trajectory rather than a sequence of
discretely sampled points.
Figure 7: Uniform interpolation.
The proposed homogenized signature speeds up
trajectory recognition, especially for large scale
databases and image sequences.
4.2 Clustering and Classification using
HMMs
At the enrollment and authentication stages, we use
Hidden Markov Models (HMMs) to model each sign
and classify according to the maximum likelihood
criterion (Rabiner, 1989). HMMs are already used
in many areas, such as speech recognition and bio-
informatics, for modeling variable-length sequences
and dealing with temporal variability within similar
sequences (Rabiner, 1989). HMMs are therefore sug-
gested in gesture and sign recognition to successfully
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
344
handle changes in the speed of the performed sign or
slight changes in the spatial domain.
In order to form a cluster of signatures to train an
HMM
n,k
for the activity n of Subject k, we use three
(3) biometric signatures, extracted from the same sub-
ject, when repeating the same activity. Each behav-
ioral signature of activity-related feature vectors con-
tains two 3D vectors (left/right hand and head times
x,y and z position in space), corresponding to the bio-
metric signature.
Specifically, each feature vector set e
k
(l
head
, l
hand
)
is used as the observation 3D vector for the training
of the HMM of Subject k. The training of the HMM
is performed using the Baum-Welch algorithm as pro-
posed in (Rabiner, 1989). The classification module
receives all the features calculated in the hand- and
head-analysis modules as input. After the training,
each cluster of behavioral biometric signatures of a
subject is modeled by a five-state (5-state), left-to-
right model, fully connected HMM, i.e. HMM
n,k
.
In the authentication/evaluation process, given a
biometric signature, we can claim that the inserted
feature vectors form the observation vectors. Given
that each HMM of the registered users is computed,
the likelihood score of the observation vectors is cal-
culated according to (Rabiner, 1989), where the tran-
sition probability and observation pdf are used. The
biometric signature for an activity is only then rec-
ognized as Subject k, if the signature likelihood, re-
turned by the HMM classifier, is bigger than an em-
pirically set threshold.
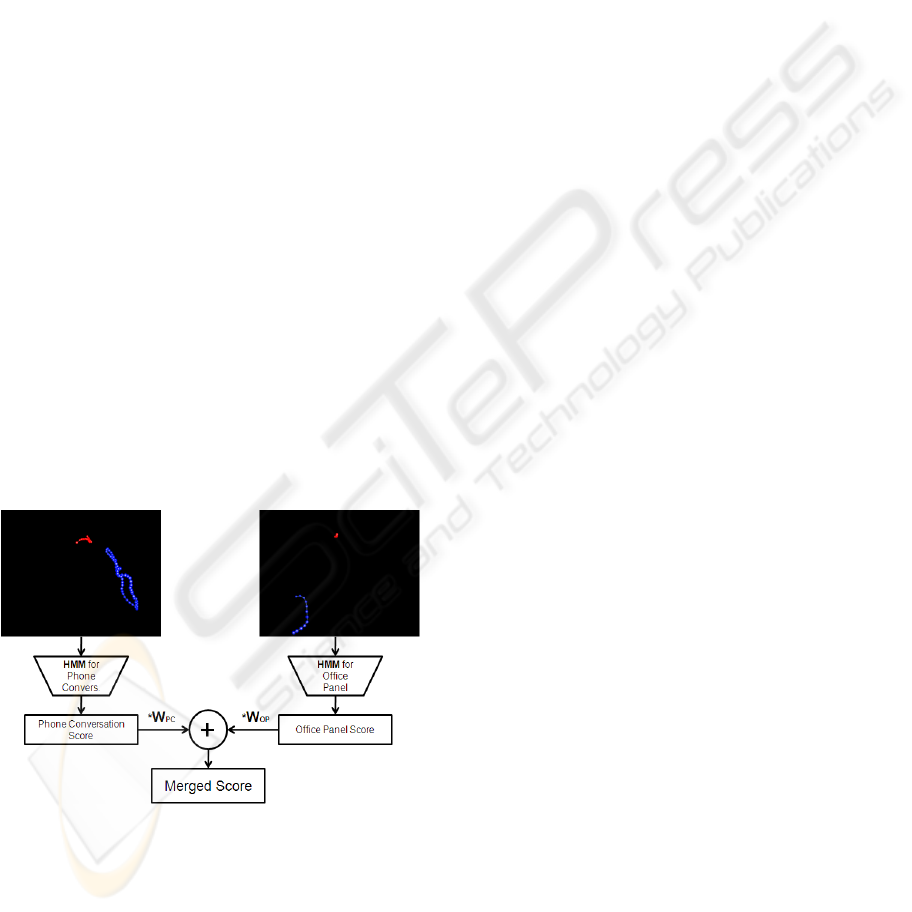
Figure 8: Combined scores.
In the proposed framework, the final decision is
formed by the combination of the two activities’ re-
sults. Specifically, the scores from each activity
(i.e.phone Conversation & Interaction with the panel)
contribute according to a weight-factor to the final
score for a given subject Figure 8). Given that one
activity usually demonstrates higher recognition ca-
pacity than the other one, it is logical that the final
decision will mainly base on the outcome of the first
activity, while the outcome of the latter will be sup-
portive.
5 DATABASE DESCRIPTION
The proposed methods were evaluated on the propri-
etary ACTIBIO-dataset. This database was captured
in an ambient intelligence indoor environment. Cur-
rently, there are two available sessions that were cap-
tured with a difference of almost six months. The first
session consists of 35 subjects while the second in-
cludes 33 subjects, that have also participated in the
first session. Briefly, the collection protocol had each
person sat at the desk and act naturally, as if he is
working. ”NORMAL” activities, such as answering
the phone, drinking water from glass, writing with
a pen, interacting with a keyboard panel, etc. and
”ALARMING” ones, such as raising the hands, etc.
were captured. Five calibrated cameras have been
constantly recording the scene:
• 2 usb cameras (Lateral, Zenithal) and 1 stereo
camera (Bumblebee Point Grey Research) for of-
fice activity recognition)
• 1 camera (Grasshopper) for face dynamics/soft
biometrics and 1 Pan-Tilt-Zoom Camera.
Further, a propriety annotator tool was developed so
as to generate activity segments and to perform sin-
gle and multiple searches for all annotated activities
sequences, using any possible criterion.
6 EXPERIMENTAL RESULTS
The proposed algorithms have been tested on one
large dataset and considerable potential in recogni-
tion performance has been seen in comparison. The
proposed framework was evaluated in the context of
three verification scenarios. Specifically, the potential
of the verification of a user has been tested, based on
his a)activity-related signature during a phone conver-
sation, b) activity-related signature during the interac-
tion with an office panel and c) the combination of the
scores of the activity-related signatures from the two
latter activities.
In order to test the robustness of the proposed al-
gorithm, additive white Gaussian noise (AWGN) with
a distribution of σ = 0.02 and zero mean value µ = 0,
has been added to all signatures of each user,while the
trained HMMs remained the same, and the evaluation
process was carried out again. The evaluation of the
ON THE POTENTIAL OF ACTIVITY RELATED RECOGNITION
345
proposed approach in an authentication scenario mo-
bilizes false acceptance/rejection rates (FAR, FRR)
and equal error rates (EER) diagrams. The lower the
EER, the higher the accuracy of the system is consid-
ered to be.
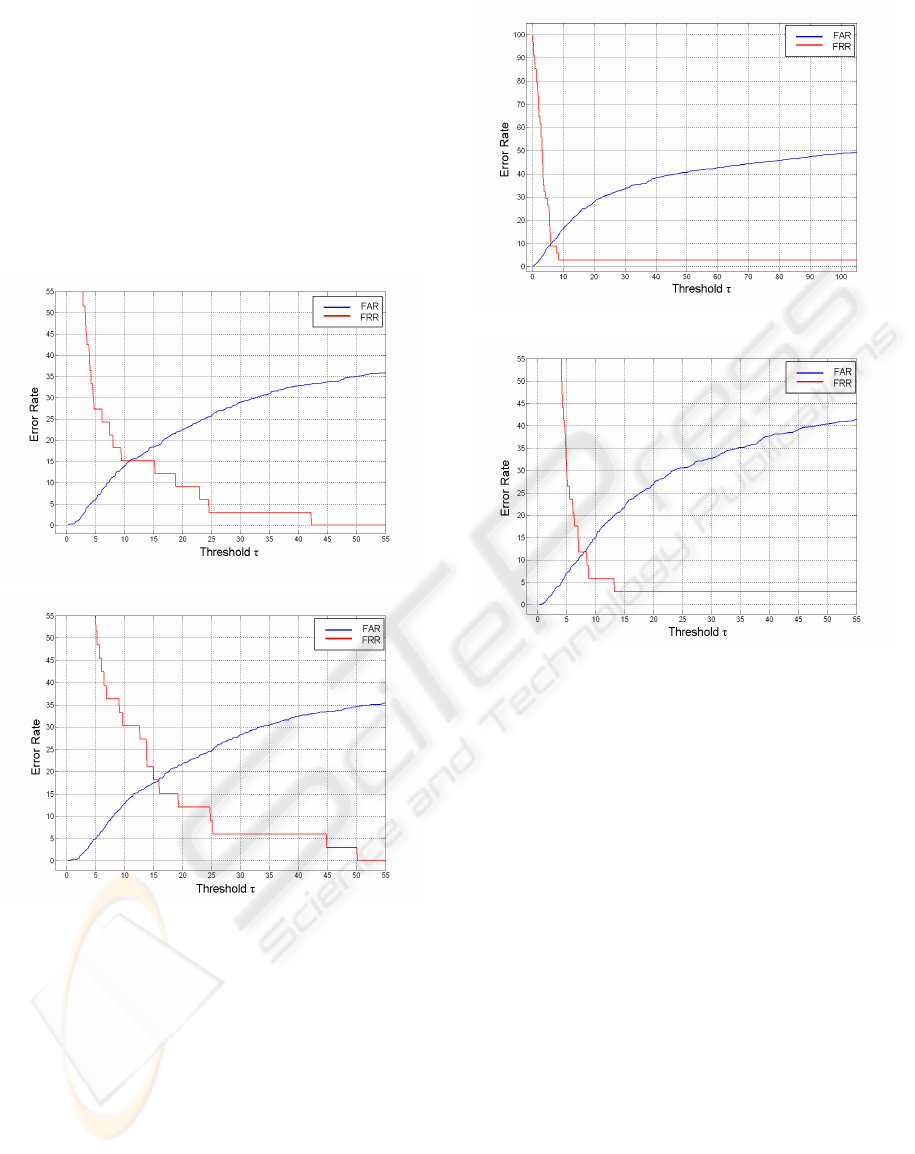
In Figure 9, the authentication potential of us-
ing just one signature, namely the one of the activity
Phone Conversation, is demonstrated. It is obvious in
Diagram 9, that the EER score lies at 15%, while in
the ”noisy” case (Diagram 10) the EER score is found
at about 18%.
Figure 9: EER: activity phone conversation.
Figure 10: Activity phone conversation with AWGN (σ =
0.02).
The authentication capacity of the second activity
which is the Interacting with an Office Panel is quite
smaller as it can be seen in Diagram 11, whereby the
EER is 9.8%. The insertion of white noise, however,
takes it at an EER slight bigger than 12% (Diagram
12).
The overall performance of our system can be fur-
ther improved, if we try to combine the recognition
potential of each of the former activities. Since the
second activity Interaction with an Office exhibits a
higher recognition capacity than the Phone Conversa-
tion activity, it is logical to give a bigger weight factor
to the first one. So, an EER score of less than 7.4%
Figure 11: EER: activity office panel.
Figure 12: Activity office panel with AWGN (σ = 0.02).
(Diagram 13) is only then achieved, when the final
score for each subject is formed by a higher contribu-
tion from the Office Panel activity and a lower contri-
bution from the Phone Conversation one, as shown
in Figure 8. It is obvious that in this case the in-
sertion of noise has the least effects, since the EER
score does not exceed the value of 9% in Diagram
14. Thus, the multi-activity scores approach is highly
recommended for user verification purposes, since it
is extremely difficult, both activities to be spoofed si-
multaneously.
The last two diagrams (Diagram 15 & Diagram
16) exhibit the degradation of the EER score in both
test-cases, respectively, (noise-free and with the inser-
tion of AWGN to the users’ signatures respectively)
in a clearer, summarizing way. The intersection of
the graph with the diagonal line drawn (x=y), indi-
cates the Equal Error Rate score of each type of sig-
nature/experiment.
To the authors’ knowledge, this is the first attempt
of using signatures extracted from everyday activities
for biometric authentication purposes.
The great authentication potential exhibited in the
current approach lies in the fact that the extracted fea-
tures encode not only behavioral information, which
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
346
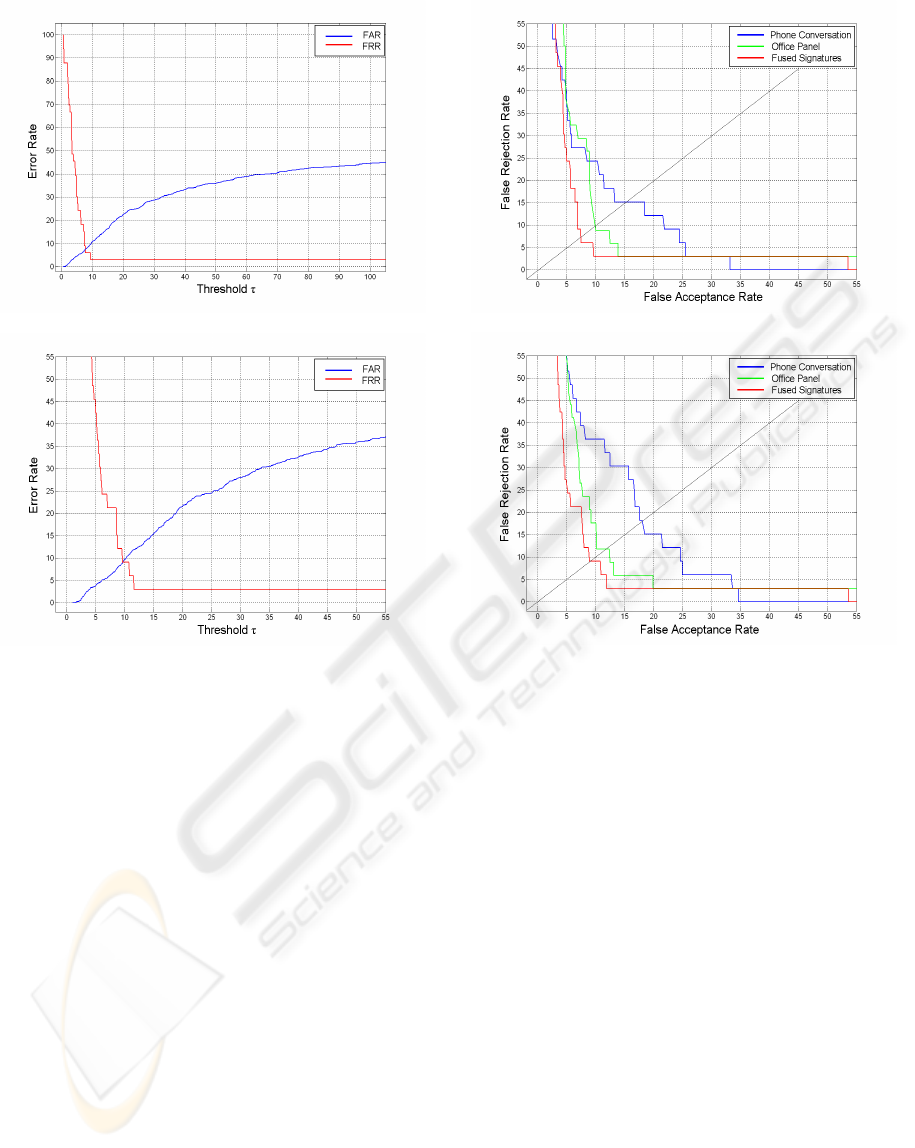
Figure 13: EER: merged activities.
Figure 14: Merged activities with AWGN (σ = 0.02).
relates to the way the user acts, but also to the user’s
anthropometric information, which describes the di-
mensions of his/her body and the relative positions of
the body parts (head & hands).
7 CONCLUSIONS
In this paper, a novel method for human identification
based on activity-related features is presented. The
tracking of the user was handled by a robust visual-
based upper-body tracker, while the activity-related
signatures were processed by a series of successive
filtering methods. Two office activities were com-
bined and investigated for giving a robust identifi-
cation result. The proposed system utilizes Hidden
Markov Models to perform classification.
It has been experimentally demonstrated that the
proposed approach on activity-related biometrics ex-
hibits significant authentication potential, while be-
ing simultaneously totally unobtrusive for the users.
A further advantage of the proposed system is that it
allows the real-time, online recognition of the users,
since it is very light in means of processing resources.
Figure 15: Detection error trade-off curves (DET).
Figure 16: Detection error trade-off curves (DET) with
AWGN (σ = 0.02).
The average frame rate recorded during the experi-
ments had a value of 18fps.
The demonstrated results ignite further research in
the the field of unobtrusive biometrics that could in-
clude the experimentation on new activities and sig-
natures. Similarly, future work could also include the
extraction of physiological characteristics - applica-
tion of skeleton models in the tracking process - from
the user and their insertion as further means in the
recognition process. Given the existing technologies,
one could not claim that the current biometric recog-
nition module could be used as a stand-alone system.
However, if combined with other modalities, such as
face recognition or other soft biometrics, it is bound to
exhibit great recognition results, by being in parallel
totally unobtrusive.
ACKNOWLEDGEMENTS
This work was supported by the European Commis-
sion’s funded project ACTIBIO.
ON THE POTENTIAL OF ACTIVITY RELATED RECOGNITION
347

REFERENCES
Bobick, A. and Davis, J. (2001). The recognition of human
movement using temporal templates. IEEE Trans.
Pattern Anal. Mach. Intell., 23(3):257–267.
Bobick, A. F. and Johnson, A. Y. (2001). Gait recog-
nition using static, activity-specific parameters. In
IEEE Proc. Computer Society Conference on Com-
puter Vision and Pattern Recognition (CVPR), vol-
ume 1, pages 423–430.
Boulgouris, N. and Chi, Z. (2007). Gait recognition us-
ing radon transform and linear discriminant analysis.
IEEE Trans. Image Process, 16(3):731–740.
Chen, L. F., Liao, H. Y. M., and Lin, J. C. (2001). Person
Identification using facial motion. IEEE Proc. Inter-
national Conference of Image Proceeding, 2:677–680.
Colmenarez, A., Frey, B., and Huang, T. S. (1999). A prob-
abilistic framework for embedded face and facial ex-
pression recognition. IEEE Proc. Computer Society
Conference on Computer Vision and Pattern Recogni-
tion, 1:592–597.
Freund, Y. and Schapire, R. E. (1999). A short introduction
to boosting. Proc. of the Sixteenth International Joint
Conference on Artificial Intelligence (JSAI), pages
771–780.
Gomez, G. and Morales, E. F. (2002). Automatic feature
construction and a simple rule induction algorithm for
skin detection. In Proc. of the ICML Workshop on
Machine Learning in Computer Vision (MLCV), pages
31–38.
Ioannidis, D., Tzovaras, D., Damousis, I. G., Argyropou-
los, S., and Moustakas, K. (2007). Gait Recognition
Using Compact Feature Extraction Transforms and
Depth Information. IEEE Trans.Inf. Forensics Secu-
rity., 2(3):623–630.
Jain, A. K., Ross, A., and Prabhakar, S. (2004). An Intro-
duction to Biometric Recognition. IEEE Trans. Cir-
cuits Syst. Video Technol., 14(1):4–20.
Junker, H., Ward, J., Lukowicz, P., and Tr¨oster, G. (2004).
User Activity Related Data Sets for Context Recog-
nition. In Proc. Workshop on ’Benchmarks and a
Database for Context Recognition’.
Kale, A., Cuntoor, N., and Chellappa, R. (2002). A frame-
work for activity-specific human identification. In
IEEE Proc. International Conference on Acoustics,
Speech, and Signal Processing (ICASSP), volume 4,
pages 3660–3663.
Li, B., Chellappa, R., Zheng, Q., and Der, S. (2001). Model-
based temporal object verification using video. IEEE
Trans. Image Process, 10:897–908.
Liu, X. and Chen, T. (2003). Video-based face recog-
nition using adaptive hidden markov models. IEEE
Proc. Computer Society Conference on Computer Vi-
sion and Pattern Recognition (CVPR), 1:I340–I345.
Poynton, C. (1997). Frequently Asked Questions about
Color.
Rabiner, L. (1989). A tutorial on hidden Markov models
and selected applications in speech recognition. Pro-
ceedings of the IEEE, 53(3):257286.
Ramesh, D. and Meer, P. (2000). Real-Time Tracking
of Non-Rigid Objects Using Mean Shift. In IEEE
Proc. Computer Vision and Pattern Recognition 2007
(CVPR), volume 2, pages 142–149.
Scharstein, D. and Szeliski, R. (2002). A Taxonomy and
Evaluation of Dense Two-Frame Stereo Correspon-
dence Algorithms. International Journal of Computer
Vision, 47(1):7–42.
Skarbek, W. and Koschan, A. (1994). Colour image
segmentation-a survey.
Viola, P. and Jones, M. (2001). Rapid Object Detection us-
ing a Boosted Cascade of Simple. In IEEE Proc. Com-
puter Society Conference on Computer Vision and
Pattern Recognition (CVPR), volume 1, pages I511–
I518.
Welch, G. and Bishop, G. (1995). An introduction to the
Kalman filter.
Wu, S. and Li, Y. (2009). Flexible signature descriptions for
adaptive motion trajectory representation, perception
and recognition. Pattern Recognition, 42(1):194–214.
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
348
