
NON-PARAMETRIC BAYESIAN ALIGNMENT AND RECOVERY
OF OCCLUDED FACE USING DIRECT COMBINED MODEL
Ching-Ting Tu and Jenn-Jier James Lien
Robotics Laboratory, Department of Computer Science and Information Engineering
National Cheng Kung University, Tainan, Taiwan, R.O.C.
Keywords: Principal Component Analysis (PCA), Eigenface, Statistical Image Models.
Abstract: This paper focuses on the problem of recovering the occluded facial image automatically with the aid of
domain specific prior knowledge and no manual face alignment or user-specified occlusion region is
needed. The robust alignment and occlusion recovery are solved sequentially by a novel recovery scheme
called the direct combined model (DCM). Local occluded facial patches are recovered by utilizing the
information propagated from other non-occluded patches and is further constrained by a global facial
geometry. The error residue between the recovered result and the geometric constraint is then used for
updating the parameter of alignment function for the next iteration. Into this recovering framework, DCM
efficiently and robustly updates the results of recovering and aligning based on a compact statistic model
representing the prior updating knowledge. Our extensive experiment results demonstrate that the recovered
images are quantitatively closer to the ground truth with no manual alignment and occlusion dection.
1 INTRODUCTION
Recently, with the help of a large collection of other
facial images, a number of face occlusion recovery
techniques have been developed. Park et al. (Park et
al., 2005) and Saito et al. (Saito et al., 1999) propose
methods to remove occlusion and reconstruct facial
images with principal component analysis (PCA).
However, the results synthesized via the original
PCA process are highly affected by the appearance
and location of the occlusion. Subsequently, Hwang
et al. (Hwang et al., 2003) and Mo et al. (Mo et al.,
2004) presented methods to recover occluded faces
using two separate eigenspaces sharing the same
coefficients. However, the occluded and non-
occluded appearances have an entirely different
character, recovery results using the same weights
for two different spaces tends to be inaccurate.
Furthermore, the learning-based facial recovery
methods are required automatically detecting the
occluded area and aligning the test image with
training examples. However, pervious methods, e.g.
(Hwang et al., 2003; Lin et al., 2009; Mo et al.,
2004), are need a user either to specify the occlusion
region or to align the occluded face images.
This paper unifies the tasks of automatic occluded
face recovery, detection, and alignment in a
Bayesian framework, and solves these problems
sequentially by a novel particle-based recovery
scheme. In this framework, we introduce a novel
learning algorithm, DCM, to deterministically and
robustly infer the affine parameters and the
recovered facial appearance.
2 DIRECT COMBINED MODEL
The DCM algorithm assumes there are two related
classes: class X and class Y, e.g. the facial
appearances of occluded and non-occluded patches
or the affine parameter and the corresponding facial
appearance. Let the structure of the coupled training
dataset be
11 2 2
(, ),(, ) ,( , )
NN
x
yxy xy…, , where N is
the total number of
(, )
x
y feature pairs. The
combined principal space
[]
TTT
XY
UU
for minimizing
the energy function
(,,)
XY
E
UUW
:
22
22
11
|| || || ||
nn
iXi iYi
ii
x
Uw x y Uw y
==
−−+ −−
∑∑
(1)
can be solved by SVD process, where and w
i
is the
weight set calculated by projecting each feature pair,
(, )
x
y , onto the combined principal space
[]
TTT
XY
UU
,
and
(, )
x
y is the mean vector pair.
495
Tu C. and James Lien J. (2010).
NON-PARAMETRIC BAYESIAN ALIGNMENT AND RECOVERY OF OCCLUDED FACE USING DIRECT COMBINED MODEL.
In Proceedings of the International Conference on Computer Vision Theory and Applications, pages 495-498
DOI: 10.5220/0002833704950498
Copyright
c
SciTePress

Figure 1: Workflow of testing process consists of (a) geometry/illumination normalization, (b) patch-based occlusion
detection and recovery, (c) probabilistic propagation: (c.1) face-based measurement, (c.2) drift, and (c.3) diffuse.
According to (De la Torre et al., 2001), the
common drawback of such combined formulation,
[]
TTT
XY
UU
, is that it is not suitable for predicating
from one class to another. We exploit the
fundamental property of SVD in Eq.(1), the
unpredictable problem is resolved via a MMSE
criterion.
2
ˆˆ
() argmin ( ) (, )
y
yx y y PxydXdY=−
∫∫
(2)
where (, )Pxy is the joint probability of feature
vectors x and y, and
ˆ
()yx
is the estimated vector y
for a given x. According, it is the expected value or
vector of the posterior probability of y for a given
observation x,
[| ]EY X x= .
Under the assumption that the joint distribution
of X and Y in Eq. (1) is a multivariate normal
density, Eq.(2) further is derived:
(
)
†
ˆ
()
YX
yx y UU x x=+ −
(3)
where
†
X
U
is the right inverse matrix of
X
U
that can
be approximated by the SVD algorithm. Eq. (3) is
defined as the DCM transformation from X to Y,
where the regression matrix
†
YX
UU
can be calculated
in off-line. Especially, in contrast to the standard
multiple multivariate linear regression approach, the
DCM transformation extracts only a few significant
feature pairs to represent the relevant information,
and thus, the major features of the X-Y correlation
are better captured.
3 DCM-BASED BAYESIAN
ALIGNMENT AND RECOVERY
We introduce a Bayesian framework to bind the
tasks of occluded facial image alignment and
recovery and the occlusion detection together, and
address such a task by a novel particle-based scheme
to model the posterior probability density function.
The proposed process takes both the global and local
facial appearance components of the input image
into account, and sequentially recovers and
propagates the particles by embedding with the
DCM algorithm.
3.1 Unified Probability Model
Following the sequential recovery algorithm, the
recovered facial appearance f in an image I is
inferred from the previously recovered result
f
′
:
*
,
arg max ( | , , ) ( , | , )
b
f
f
Pf bIP b f Iddb
ξ
ξ
ξξ
′
=
∫∫
(4)
where the affine parameter
ξ
and the PCA weight
vector b are included for aligning f with training
examples and for guaranteeing the global facial
geometric structure of f. It naturally decomposes into
two terms:
Posterior Probability
(|,,)Pf bI
ξ
. Since the
weight vector b is independent from the affine
parameter
ξ
, the posterior density term are factored
as (| )( |,)Pb f P f I
ξ
in the recovery stage (sec
3.2).
Propagation Probability
(, | ,)
P
bfI
ξ
′
. It is
defined as the probabilistic propagation formulation:
,
(, | ) (, | , ) ( , | )
b
pbf Pb bP bfddb
ξ
ξξξξξ
′′
′
′′ ′′ ′ ′ ′
=
∫∫
(5)
where
'
ξ
and
'b
are from the previous iteration.
Fig. 1 illustrates the proposed particle based
solution for this Bayesian framework. In practice,
particles
are sampled based on two inner corner
(a) Geometry/Illumination
Normalization
.
.
.
.
(b) Local Patch-based Occlusion Detection and
Recovery
.
.
.
l
l
[,]
TT
m
l
UU
[]
f
U
[,]
TT
p
f
UU
Δ
Δ
(c.1) Global Face-based Measurement
(c.2) Drift
(c.3) Diffuse
0
I
P+
S
0
1
{( )}
K
iii
PP P
=
=+Δ
1
1
{,()}
K
iiii
fP
K
π
=
=
A
g
A
l
.
.
.
.
O-De
.
.
.
.
.
.
.
.
O-Re
1
{()}
K
iii
fP
=
Pr+Re
1
1
ˆ
{,()}
ˆ
()
K
iiii
iiii
fP
f
ff
π
π
=
−
∝Δ = −
.
.
.
.
.
.
.
.
.
.
.
.
'
1
{}
K
ii
f
=
Δ
'
1
{' }
K
ii ii
PPP
=
=+Δ
1
{''}
K
ii ii
PP P
=
=+Δ
RS
'
1
{}
K
ii
P
=
Δ
1
{' '}
K
iii
PP
=
+Δ
-S: Sampling
-RS: Re-sampling
-A
g
: Geometry
Normalization
-A
l
: Illumination
Normalization
-O-De: Occlusion
Detection
-O-Re: Occlusion
Recovery
-Pr: Projection
on to U
f
-Re: Reconstruction
based on U
f
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
496

Figure 2: Training process consists of face-based PCA
creation, patch-based DCM creation, and facial
appearance error-to-eyes position updating DCM creation.
points of the eyes P by an affine transformation
function
g
A
via a parameter
ξ
. The initial position
of two inner corner points of the eyes
P
0
(it is
probably occluded) is roughly detected, and K
initializations particles are randomly generated
around
P
0
:
{}
o
PP P=+Δ
. The particle weight
π
is
measured with its coincidence with the learned
eigenspace
f
U
(Initial weights of all particles are
equal). Further, to suppress the effects of
illumination differences between different facial
appearances, a illumination
normalization scheme A
l
is performed.
3.2 Local-based Occlusion Recovery
The posterior density, (|,,)Pf bI
ξ
for recovery
stage is modeled by a Markov network embedded
with the proposed DCM algorithm. Different from
the common patch-based Markov network
approaches (Freeman et al., 2000; Liu et al., 2001;
Sudderth et al., 2003) that selects the recovered
patches from the training database, the current
approach recovers patches by other non-occluded
patches via the DCM transformation.
Learning Patch Pair l-to-m DCM
[]
TTT
lm
UU
(Fig. 2). For each patch
, {1, 2,..., }lm M∈ (each f is
composed of M patches), the l-m patch pairs of N
training facial appearances
{()}
f
P are used to train
the combined principal space
[]
TTT
lm
UU
and the
DCM transformation from l to m by Eq. (1) and Eq.
(3), respectively.
Occlusion Detection (Fig. 1.b). The confidence of
visibility of patch l is written as c
l.
which is directly
proportional to the difference between the original
local texture detail of patch l and the reconstructed
texture by the bidirectional DCM transforms from l
to m and from m back to l, where the patch m is one
of neighbor patches of l.
Occlusion Recovery (Fig. 1.b). We solve the
defined Markov network by the nonparametric belief
propagation method (NBP) (Sudderth et al., 2003),
but the recovery order is from non-occluded patches
to the occluded patches sorted based on their
confident values, i.e. the c-value.
3.3 Global-based Face Alignment
After the recovery, the higher-weighted particles are
chosen to form the distribution of
(, | )
P
bf
ξ
′′ ′
in
the face-based measurement step of the probabilistic
propagation stage (Fig. 1.c.1), where only these
correctly aligned ones will be treated as the updating
initializations in the following steps of re-
randomization. According, the summarization of the
current recovered results,
{(), }fP
π
′
, is the mean of
these particles,
1
[]
N
ii
i
f
Ef f
π
=
==
∑
.
Learning the Position-facial Appearance DCM
[]
TTT
fP
UU
ΔΔ
(Fig. 2). Each training image I generates
N’ perturbed facial appearances, {( )}
f
PP+Δ , by
disturbing elements of the manually labeled position
P. Subsequently,
'NP
×
Δ of N training images and
their corresponding facial appearance difference
generated by
f
U
are used to train the DCM
combined principal space
[]
TTT
fP
UU
ΔΔ
and the DCM
transformation from
f
Δ
to
PΔ
, respectively.
Face Alignment. The drift step (Fig. 1.c.2) updates
positions
{}PP P
′
=
+Δ from the given facial
differences,{}
f
Δ
based on the combined space
[]
TTT
fP
UU
ΔΔ
in order to form the transition
probability,
(, | , )
P
bb
ξ
ξ
′
′
. Finally, a diffuse step
(Fig. 1.c.3) is done on these higher-weighted
particles to generate several copies and shift them to
the neighbors of the updated position,
{}
P
P
′′
+Δ
.
The new set of particles then forms the distribution
of
(, | )
P
bf
ξ
′
for the following step.
4 EXPERIMENTAL RESULTS
The performance of the proposed recovery system
was evaluated by performing a series of
experimental trials using training and testing
databases comprising 100 and 50 facial images,
respectively, where specific facial feature regions of
(, ) {1, , }lm M∀∈…
2
M
M×
Local Patch-based
DCM Creation :
DCM:
[]
TTT
m
l
UU
ˆ
F
FF
P
Δ= −
Δ
A
g
: Geometric normalization
A
l
: Illumination normalization
S: Samp ling of P
Pr: Projection to eigenspace
Re: Reconstruction based on eigenspace
L
M
: Sep arate as M local p atches
1
{}
N
iii
I
P
=
+
N
1
{()}
N
iii
FP
=
N
m-patch
N
'
11
{{ }}
N
N
ii jji
IPP
==
++Δ
N
'
11
{{ ( )} }
NN
ii jji
F
PP
==
+Δ
'
N
N×
'
11
ˆ
{{ ( )} }
NN
ii jji
FP P
=
=
+Δ
'NN
×
[]
TTT
Fp
UU
ΔΔ
Facial Appearance and Eye
Position DCM Creation :
DCM:
Global Face-based
PCA Creation:
Eigenspcae:
[]
F
U
l-patch
S
A
g
A
l
A
g
A
l
Pr+
Re
1
1
N
1
N
1
1
1
1
F
()m
f
()l
f
L
M
NON-PARAMETRIC BAYESIAN ALIGNMENT AND RECOVERY OF OCCLUDED FACE USING DIRECT
COMBINED MODEL
497
the testing images are occluded manually. The
normalized images are 28x96 pixels and the patch
size and overlap size are 13 and 5, respectively.
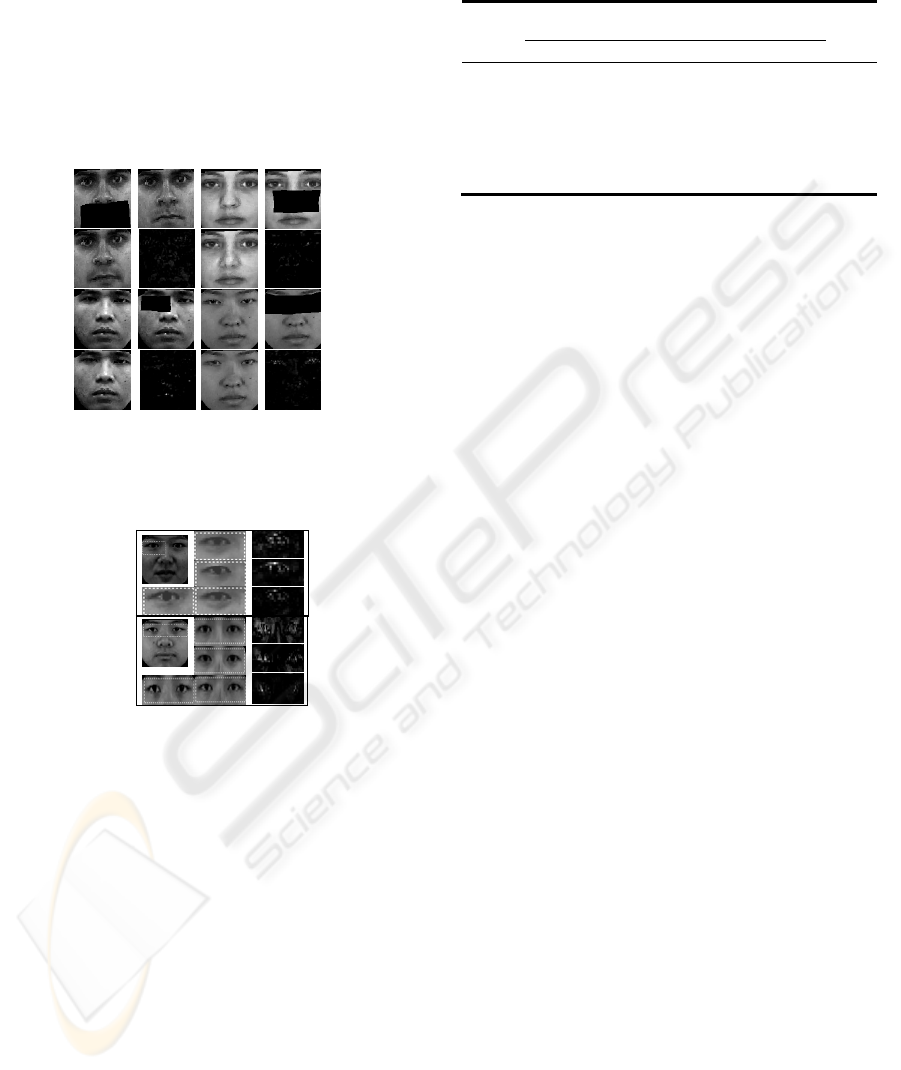
Fig. 3 presents representative examples of the
reconstruction results. Table 1 presents the average
recovery and alignment errors computed over all the
images in the testing database. Fig. 4 compares the
recovery results obtained using the proposed DCM
method with those obtained by methods in (Hwang
et al., 2003 and in Park et al., 2005).
Figure 3: Reconstruction results of the DCM schemes: (1
st
and 3
rd
rows) occluded and ground truth facial images and
(2nd and 4
th
rows) reconstructed facial images and its
difference from its ground truth.
Figure 4: Two examples of reconstruction results and
errors using three eigen-based method. (1st column):
original occluded images and the occlude features.
5 CONCLUSIONS
This study has presented a Bayesian framework for
sequential facial occlusion alignment, detection, and
recovery through a DCM-based algorithm. By
considering both local and global facial structures,
our recovered results closely resemble the ground
truth facial appearances. Overall, the proposed
method is a promising way to improve the
performance of existing automatic face recognition,
facial expression recognition, and facial pose
estimation applications.
Table 1: Average and standard deviation of the position P
and the recovered f estimation errors for all images in
testing database by different levels of occlusion.
Facial
features
Ave. Error
(Pixel/Grayvalues)
Std. Dev.
(Pixel/Grayvalues)
Occl
usion
Area
P f P f
Left Eye 0.7 6.6 0.5 1.7 10%
Right
Eye
0.6 6.5 0.6 1.8 10%
Both
Eye
0.7 6.6 0.6 16 24%
Nose 1.0 7.0 1.2 2.0 16%
Mouth 1.6 6.8 1.5 1.9 20%
REFERENCES
De la Torre, F. D.and Black, M. J. (2001). Dynamic
Coupled Component Analysis. CVPR.
Freeman, W.T., Pasztor, E.C., and Carmichael, O.T.
(2000). Learning Low-Level Vision. IJCV, 40: 25-47.
Hwang, B.W. and Lee, S.W. (2003). Reconstruction of
Partially Damaged Face Images Based on a Morphable
Face Model. IEEE Trans. on PAMI, 25: 365-372.
Lin, D. and Tang, X. (2009). Quality-Driven Face
Occlusion Detection and Recovery. ICCV.
Liu, C., Shum, H.Y., and Zhang, C.S. (2001). A Two-Step
Approach to Hallucinating Faces: Global Parametric
Model and Local Nonparametric Model. CVPR.
Mo, Z., Lewis, J.P., and Neumann, U. (2004). Face
Inpainting with Local Linear Representations. BMVC.
Park, J.S., Oh, Y.H., Ahn, S.C., and Lee, S.W. (2005).
Glasses Removal from Facial Image Using Recursive
PCA Reconstruction. IEEE Trans. on PAMI, 27: 805-
811.
Saito, Y., Kenmochi, Y., and Kotani, K. (1999).
Estimation of Eyeglassless Facial Images Using
Principal Component Analysis. ICIP.
Sudderth, E., Ihler, A., Freeman, W., and Willsky, A.
(2003). Nonparametric Belief Propagation. ICCV.
Hwang,2003
‐Park,2005
‐DCM
‐Hwang,2003
‐Park,2005
‐DCM
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
498
