
FACIAL POSE ESTIMATION USING ACTIVE APPEARANCE
MODELS AND A GENERIC FACE MODEL
Thorsten Gernoth, Katerina Alonso Martínez, André Gooßen and Rolf-Rainer Grigat
Vision Systems E-2, Hamburg University of Technology, Harburger Schloßstr. 20, 21079 Hamburg, Germany
Keywords:
Pose estimation, Active appearance model, Infrared imaging, Face recognition.
Abstract:
The complexity in face recognition emerges from the variability of the appearance of human faces. While
the identity is preserved, the appearance of a face may change due to factors such as illumination, facial pose
or facial expression. Reliable biometric identification relies on an appropriate response to these factors. In
this paper we address the estimation of the facial pose as a first step to deal with pose changes. We present a
method for pose estimation from two-dimensional images captured under active infrared illumination using a
statistical model of facial appearance. An active appearance model is fitted to the target image to find facial
features. We formulate the fitting algorithm using a smooth warp function, namely thin plate splines. The
presented algorithm requires only a coarse and generic three-dimensional model of the face to estimate the
pose from the detected features locations. The desired field of application requires the algorithm to work
with many different faces, including faces of subjects not seen during the training stage. A special focus is
therefore on the evaluation of the generalization performance of the algorithm which is one weakness of the
classic active appearance model algorithm.
1 INTRODUCTION
In the modern society there is a high demand to au-
tomatically and reliably determine or verify the iden-
tity of a person. For example, to control entry to re-
stricted access areas. Using biometric data to iden-
tify a target person has some well known concep-
tual advantages, such as the identification procedure
is immutable bound to the person which should be
identified. Using facial images as a biometric charac-
teristic has gained much attention and commercially
available face recognition systems exist (Zhao et al.,
2003, Phillips et al., 2007). However unconstrained
environments with variable ambient illumination and
changes of head pose are still challenging for many
face recognition systems.
The appearance of a face can vary drastically if the
intensity or the direction of the light source changes.
This problem can be overcome by employing active
imaging techniques to capture face images under in-
variant illumination conditions. In this work we use
active near-infrared (NIR) illumination (Gernoth and
Grigat, 2010). Possible surrounding light in the visi-
ble spectrum is filtered out.
Another benefit of active near-infrared illumina-
tion is the bright pupil effect which can be employed
to assist eye detection. Pupils appear as unnaturally
Figure 1: The bright pupil effect perceivable under active
near-infrared illumination.
bright spots when an active near-infrared radiation
source is mounted close to the camera axis (Figure 1).
We use image processing to detect these bright spots
in the images and thus can reliable detect the eyes
(Zhao and Grigat, 2006).
Challenging for face recognition systems are also
changes of head pose. Appearance-based face recog-
nition systems use the texture of faces in the form of
two-dimensional frontal images to identify a target
person. But faces are three-dimensional objects and
due to head pose changes, their appearance in images
can change significantly.
There are three different main strategies to over-
499
Gernoth T., Alonso Martínez K., Gooßen A. and Grigat R. (2010).
FACIAL POSE ESTIMATION USING ACTIVE APPEARANCE MODELS AND A GENERIC FACE MODEL.
In Proceedings of the International Conference on Computer Vision Theory and Applications, pages 499-506
DOI: 10.5220/0002835604990506
Copyright
c
SciTePress

come this problem in appearance-based approaches
for face recognition. The first is to use features which
are invariant to these deformations, e. g. invariant to
changes of the facial pose relative to the camera. An-
other strategy is to use or synthetically generate a
large and representative training set. A third approach
is to separate the factors which code the identity of a
person from other sources of variation, such as pose
changes. This is addressed in this paper. The pos-
ture of the head in-front of the camera is estimated
from monocular images. The additional pose infor-
mation may be utilized to register the facial images
very precise and thereby make it possible to perform
face recognition using a pose normalized representa-
tion of faces.
A survey of head pose estimation in computer
vision was recently published by Murphy-Chutorian
and Trivedi, 2009. We use active appearance models
(AAM) to detect facial features in the images. Sub-
sequently, the head pose is determined from a sub-
set of the localized facial features using an analyt-
ical algorithm (DeMenthon and Davis, 1995, Mar-
tins and Batista, 2008). The algorithm can esti-
mate the pose from a single image using four or
more non-coplanar facial features positions and their
known relative geometry. Using three-dimensional
model points from the generic Candide-3 face model
(Ahlberg, 2001, Dornaika and Ahlberg, 2006) and
their image correspondences estimated using the ac-
tive appearance model, the posture of the head in-
front of the camera can be estimated.
Active appearance models are a common ap-
proach to build parametric statistical models of fa-
cial appearance (Cootes et al., 2001, Stegmann et al.,
2000). The desired field of application requires the al-
gorithm to work with many different faces, including
faces not seen during the training stage (Gross et al.,
2005). We use simultaneous optimization of pose and
texture parameters and formulate the fitting algorithm
using a smooth warping function (Bookstein, 1989).
The thin plate spline warping function is parametrized
efficiently to achieve some computational advantages.
A special focus is on the evaluation of the generaliza-
tion performance of the model fitting algorithm.
In Section 2 we introduce statistical models of fa-
cial appearance. Section 3 describes the smooth warp-
ing function. The pose estimation algorithm is ex-
plained in Section 4. With experimental results and
discussion in Section 5, we conclude in Section 6.
2 STATISTICAL MODELS OF
FACIAL APPEARANCE
We parametrize a dense representation of facial ap-
pearance using separate linear models for shape and
texture (Matthews and Baker, 2004). The shape
and texture parameters of the models are statistically
learned from a training set.
2.1 Facial Model
Shape information is represented by an ordered set
of l landmarks x
i
, i = 1 . . . l. These landmarks de-
scribe the planar facial shape of an individual in a
digital image. The landmarks are generally placed
on the boundary of prominent face components (Fig-
ure 2a). The two-dimensional landmark coordinates
are arranged in a shape matrix (Matthews et al., 2007)
s =
x
1
x
2
. . . x
l
>
, s ∈ R
l×2
. (1)
Active appearance models express an instance s
p
of a particular shape as mean shape s
0
and a linear
combination of n eigenshapes s
i
, i.e.
s
p
= s
0
+
n
X
i=1
p
i
s
i
. (2)
The coefficients p
i
constitute the shape parameter
vector p =
p
i
, . . . , p
n
>
. The mean shape s
0
and shape
variations s
i
are statistically learned using a training
set of annotated images (Figure 2a). Since reliable
pupil positions are available (Zhao and Grigat, 2006),
the training images can be aligned with respect to the
pupils in a common coordinate system I ⊂ R
2
us-
ing a rigid transformation. The images are rotated,
scaled and translated using a two-dimensional simi-
larity transform such that all the pupils fall in the same
position (Figure 2b). The mean shape s
0
and basis of
shape variations s
i
are obtained by applying princi-
pal component analysis (PCA) on the shapes of the
aligned training images (Cootes et al., 2001).
The texture part of the appearance is also modeled
using an affine linear model of variation. Texture is
defined as the intensities of a face at a discrete set A
0
of positions x in a shape-normalized space A ⊂ R
2
.
The texture of a face is vectorized by raster-scanning
it into a vector. Similar to the shape, λ =
λ
i
, . . . , λ
m
>
denotes a vector of texture parameters describing a
texture instance
a
λ
= a
0
+
m
X
i=1
λ
i
a
i
. (3)
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
500

(a) Annotated image (b) Aligned shapes
Figure 2: Shapes of annotated images aligned with respect
to pupil positions.
(a) a
0
(b) a
1
(c) a
2
Figure 3: The mean texture a
0
and the first two basis of
texture variations a
i
.
The texture at position x ∈ A
0
of a
λ
is a function
of the domain A, with
a
λ
: A → R; x 7→ a
λ
(x). (4)
To create a texture model, all the aligned training
images are warped into the shape-normalized space.
The shape-normalized space is given by the mean
shape s
0
of the shape model. A smooth warping func-
tion that maps one image to another by relating two
sets of landmarks is used as described in Section 3.
A
0
contains positions that lie inside the mean shape
s
0
. PCA is applied on the training textures to obtain
the mean texture a
0
and basis of texture variations a
i
.
Photometric variations of the texture a
λ
are mod-
eled separately by a global texture transformation
T
u
(a
λ
(x)) = (u
i
+ 1)a
λ
(x)+u
2
(Baker et al., 2003). The
intensities of the texture vector a
λ
are scaled by a
global gain factor (u
i
+ 1) and biased by u
2
.
To simplify the notation, the parameters describ-
ing shape, texture and photometric variations are
combined into the single parameter vector
q =
p
>
u
>
λ
>
>
. (5)
2.2 Model Fitting
The parameters of the generative model described in
Section 2.1 need to be estimated to fit the model to a
target image. The target image can be aligned to the
common coordinate system with respect to the pupils
(Section 2.1). The target image is regarded as a con-
tinuous function of the domain I:
I : I → R; x
0
7→ I(x
0
). (6)
Fitting the model to an image is generally done by
minimizing some error measure between the modeled
texture and the target image. The error at the position
x ∈ A
0
between the generated texture and the target
image is
e(x, q) = a
λ
(x) − T
u
(I(W(x, p))). (7)
W(x, p) is a non-linear warping function that maps po-
sitions x ∈ A of the model to positions x
0
∈ I of the
target image. The warping function is parametrized
by the shape parameters p as described in Section 3.
Typically the sum-of-squared error of all positions
x is minimized to find the parameters q, such that
argmin
q
1
2
X
x∈A
0
e(x, q)
2
. (8)
This is a non-linear optimization problem. Gen-
eral optimization techniques can be used to find a so-
lution. Commonly used is an iterative Gauß-Newton
style algorithm (Matthews and Baker, 2004). We as-
sume a current estimate of q and solve for incremental
updates ∆q in each step. The update can be combined
with the previous estimate in several ways (Matthews
and Baker, 2004). The simplest update is the linear
additive increment q ← q + ∆q. The following ex-
pression is minimized with respect to ∆q:
argmin
∆q
1
2
X
x∈A
0
e(x, q + ∆q)
2
. (9)
Performing a first-order Taylor expansion of the
residual e(x, q + ∆q) around q yields:
e(x, q + ∆q) ≈ e(x, q) +
∂e(x, q)
∂q
!
>
∆q (10)
≈ e(x, q) +
∂e(x, q)
∂p
!
>
∆ p+ (11)
∂e(x, q)
∂u
!
>
∆u +
∂e(x, q)
∂λ
!
>
∆λ.
The Gauß-Newton algorithm uses the update
∆q = −H
−1
X
x∈A
0
e(x, q)
∂e(x, q)
∂q
(12)
with
H =
X
x∈A
0
∂e(x, q)
∂q
∂e(x, q)
∂q
!
>
. (13)
FACIAL POSE ESTIMATION USING ACTIVE APPEARANCE MODELS AND A GENERIC FACE MODEL
501

Solving for ∆q and using a Gauß-Newton step to
optimize Eq. (9) involves computing an approxima-
tion of the Hessian matrix (Eq. (13)) and its inverse in
each iteration. Assuming a constant Hessian matrix
results in significant computational savings (Amberg
et al., 2009, Cootes et al., 2001).
Matthews and Baker, 2004 showed that the lin-
ear additive increment is not the only parameter up-
date strategy. They introduced compositional up-
date strategies which permit overall cheaper algo-
rithms for person-specific active appearance mod-
els. Their simultaneous inverse compositional algo-
rithm for person-independent active appearance mod-
els (Gross et al., 2005) is however not as computa-
tionally efficient.
3 THIN PLATE SPLINE WARP
A warp function maps positions of one image to posi-
tions of another image by relating two sets of land-
marks. The most common warp functions are the
piecewise affine warp (Glasbey and Mardia, 1998)
and the thin plate spline (TPS) warp (Bookstein,
1989). The affine warp function has the advantage of
being simple and linear in a local region. But although
it gives a continuous deformation, it is not smooth.
Thin plate spline warping as an alternative produces a
smoothly warped image. However, it is more expen-
sive to calculate and non-linear due to the interpolat-
ing function used. In this paper we focus on the thin
plate spline warp.
In the case of our active appearance model, the
warp maps the positions x from the shape-normalized
space A to positions x
0
∈ I of the target image. The
transformation is such that the landmarks x
i
, i = 1 . . . l
are mapped to corresponding landmarks x
0
i
, i = 1. . . l
of a shape instance s
p
in the target image. Since the
landmark positions in the target image depend on the
shape parameters p, we parametrize the warp function
by the shape parameter vector p.
The thin plate spline warp function W : A → I is
vector valued and defined as (Bookstein, 1989,Cootes
and Taylor, 2004):
W(x, p) =
l
X
i=1
w
i
U
(
kx − x
i
k
)
+ c + Cx (14)
= W(p)
|{z}
2×(l+3)
· k(x)
|{z}
(l+3)×1
, (15)
with
W( p) =
h
w
1
. . . w
l
c C
i
, (16)
k(x) =
h
U(r
1
(x)) . . . U(r
l
(x)) 1 x
>
i
>
, (17)
where r
i
(x) = kx − x
i
k is the Euclidean distance be-
tween a position x and landmark x
i
of the mean
shape s
0
. U(r) is the TPS interpolating function (e.g.
U(r) = r
2
logr
2
with U(0) = 0) that makes the warp
function non-linear.
W( p) contains the warp weights. The weights c, C
represent the affine part of the mapping in Eq. (14).
The warp weights are defined by the sets of source
and destination landmarks to satisfy the constraints
W(x
i
, p) = x
0
i
∀ i ∈ {1. . . l} and to minimize the bending
energy. Combining all constraints yields in a linear
system (Bookstein, 1989):
"
K P
P
>
O
#
W( p)
>
= L W( p)
>
=
"
s
p
o
#
(18)
where K is a l × l matrix and K
i j
= U
kx
i
− x
j
k
, the
i’th row of the l × 3 matrix P is
1 x
>
i
, O is a 3 × 3
matrix of zeros and o is a 3 × 2 matrix of zeros. If L
is non-singular the warp weights are given by
W( p) =
L
−1
Bs
p
>
(19)
with
B =
1 0 · · · 0
0 1 · · · 0
.
.
.
.
.
.
.
.
.
0 0 . . . 1
0 0 · · · 0
0 0 · · · 0
0 0 · · · 0
| {z }
(l+3)×l
. (20)
During model fitting (Section 2.1) we estimate it-
eratively the parameters p of the shape s
p
that cor-
responds to the shape of the target image. Since
the residual in Eq. (7) is defined within the shape-
normalized space A given by s
0
, the matrix L de-
pends only on the landmarks x
i
of the mean shape s
0
.
The mean shape does not change for a give training
set. L and its inverse can therefore be precomputed.
Parametrization of the warp function with respect
to p yields another computational advantage. The tex-
ture is defined at a discrete set of positions A
0
(Sec-
tion 2.1). The residual in Eq. (7) only need to be eval-
uated at these positions. The positions depend on s
0
and do not change for a give training set. k(x) can
also be precomputed for all x ∈ A
0
.
Using Gauß-Newton to minimize Eq. (9) requires
the Jacobian matrix
∂W(x, p)
∂p
of the warp function with
respect to the shape parameters (Eq. (11)):
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
502
∂e(x, q)
∂p
!
>
= −
∂T
u
(I(W(x, p))
∂p
!
>
(21)
= −
∂T
u
(I(W(x, p))
∂W (x, p)
!
>
W(x, p)
∂p
(22)
Using the parametrization of the warp function
with respect to p gives the components of the Jaco-
bian matrix as follows:
∂W (x, p)
∂p
i
= s
i
L
−1
B
>
k(x). (23)
The Jacobian does not depend on the value of the eval-
uation point p and can be precomputed for all x ∈ A
0
.
4 POSE ESTIMATION
The pose of a face in-front of the camera is defined
as its position and orientation relative to a three-
dimensional camera coordinate system. We denote by
ˆ
x
i
a three-dimensional feature point of a face model in
a coordinate system attached to the model. The per-
spective projection of a feature point onto the image
plane of the camera is x
i
. The pose of a face with
respect to a camera can be defined with a translation
vector t ∈ R
3
and a rotation matrix R ∈ SO(3):
• The translation vector is the vector from the origin
of the coordinate system attached to the camera to
the origin of the face model: t =
t
x
t
y
t
z
>
.
• The rotation matrix is the matrix whose rows are
the unit vectors of the camera coordinate system
expressed in the coordinate system of the face
model: R =
h
i j k
i
>
.
Under perspective projection with a camera hav-
ing focal length f , x
i
is related to the corresponding
feature point of the model
ˆ
x
i
as follows:
x
i
=
f
k
>
ˆ
x
i
+ t
z
"
i
>
j
>
#
ˆ
x
i
+
"
t
x
t
y
#!
. (24)
The equation may be written as in DeMenthon and
Davis, 1995,
x
i
(1 +
i
) −
"
t
0
x
t
0
y
#
=
"
i
0
>
j
0
>
#
ˆ
x
i
, (25)
with i
0
=
f
t
z
i, j
0
=
f
t
z
j, t
0
x
=
f
t
z
t
x
, t
0
y
=
f
t
z
t
y
and
i
=
k
>
ˆ
x
i
t
z
.
By setting
i
= 0, x
i
equals the scaled orthographic
projection of the face model point
ˆ
x
i
. Scaled ortho-
graphic projection is similar to perspective projection
if the depth of the face is small compared to its dis-
tance to the camera. For the case of fixed
i
and as-
suming known projection of the model origin onto the
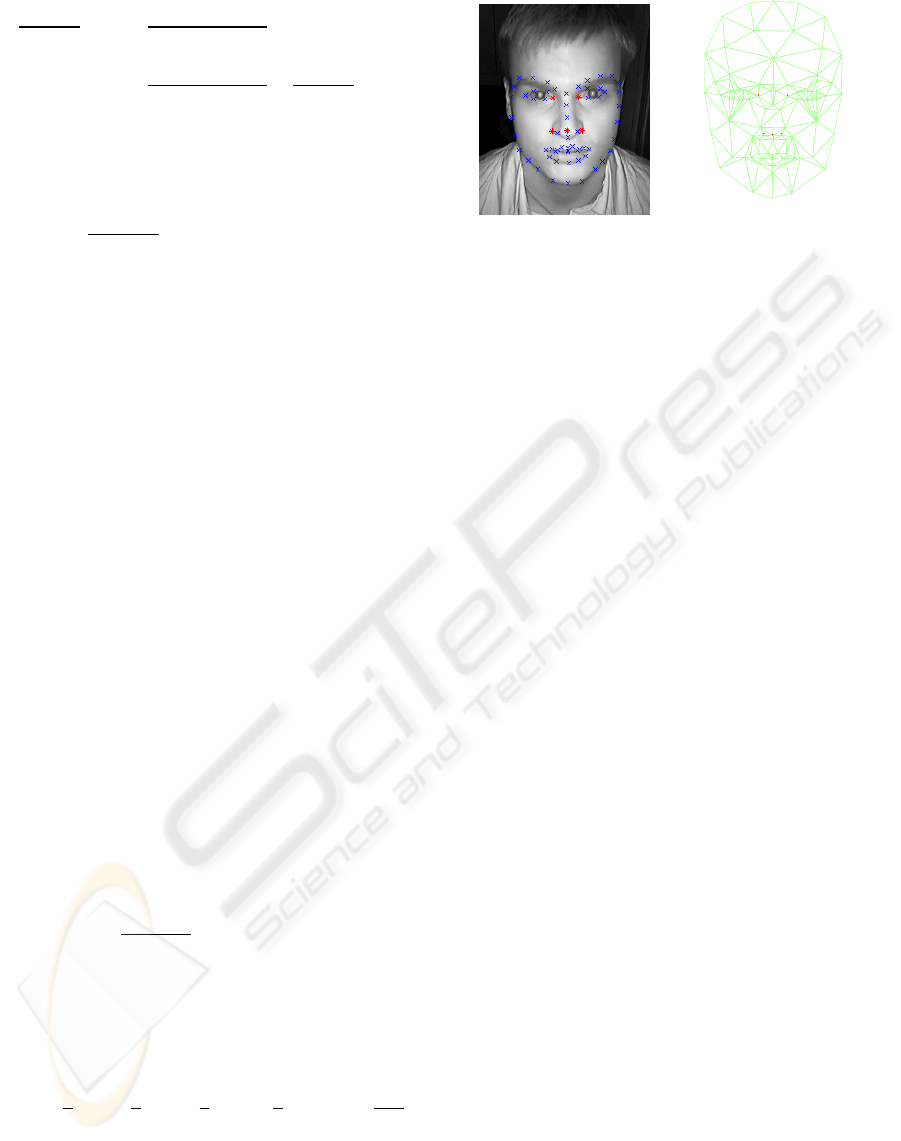
(a) AAM Landmarks (b) Candide Model
Figure 4: (a) The selected landmarks for pose estimation
and (b) the corresponding Candide-3 model.
image plane, the unknown i, j and t
z
can be com-
puted from Eq. (25) from at least 4 non-coplanar fea-
ture points (DeMenthon and Davis, 1995,Martins and
Batista, 2008). The third row of the rotation matrix R
can be obtained from the cross product k = i × j. Us-
ing an iterative scheme and estimating
i
from k and
t
z
of the previous iteration, an approximation of the
pose can be computed.
4.1 Generic Face Model
A three-dimensional model of the face shape is re-
quired to estimate the pose. The Candide-3 model
(Ahlberg, 2001) is used. This general model is used
in its neutral state but adapted in scale for facial pose
estimation of all subjects (Figure 4b).
4.2 Feature Point Selection
As stated above, the algorithm requires at least 4 non-
coplanar feature points to estimate the facial pose.
These points are chosen from the estimated landmark
positioning provided by the AAM. A correspondence
was established between the Candide-3 model points
and the landmarks of the active appearance model.
Since only one generic face model is used, the
landmarks which do not vary much between faces
of different subjects are chosen as feature points for
pose estimation. The variability of each landmark was
studied in order to pick the most stable ones. As it can
be seen in Figure 4a, two landmarks from the eye con-
tour and landmarks on the nose are chosen. The nose
tip is used as the origin of the coordinate system of
the face model.
5 EXPERIMENTS
We use the TUNIR database (Zhao et al., 2007) for
all experiments. The database consists of recordings
FACIAL POSE ESTIMATION USING ACTIVE APPEARANCE MODELS AND A GENERIC FACE MODEL
503
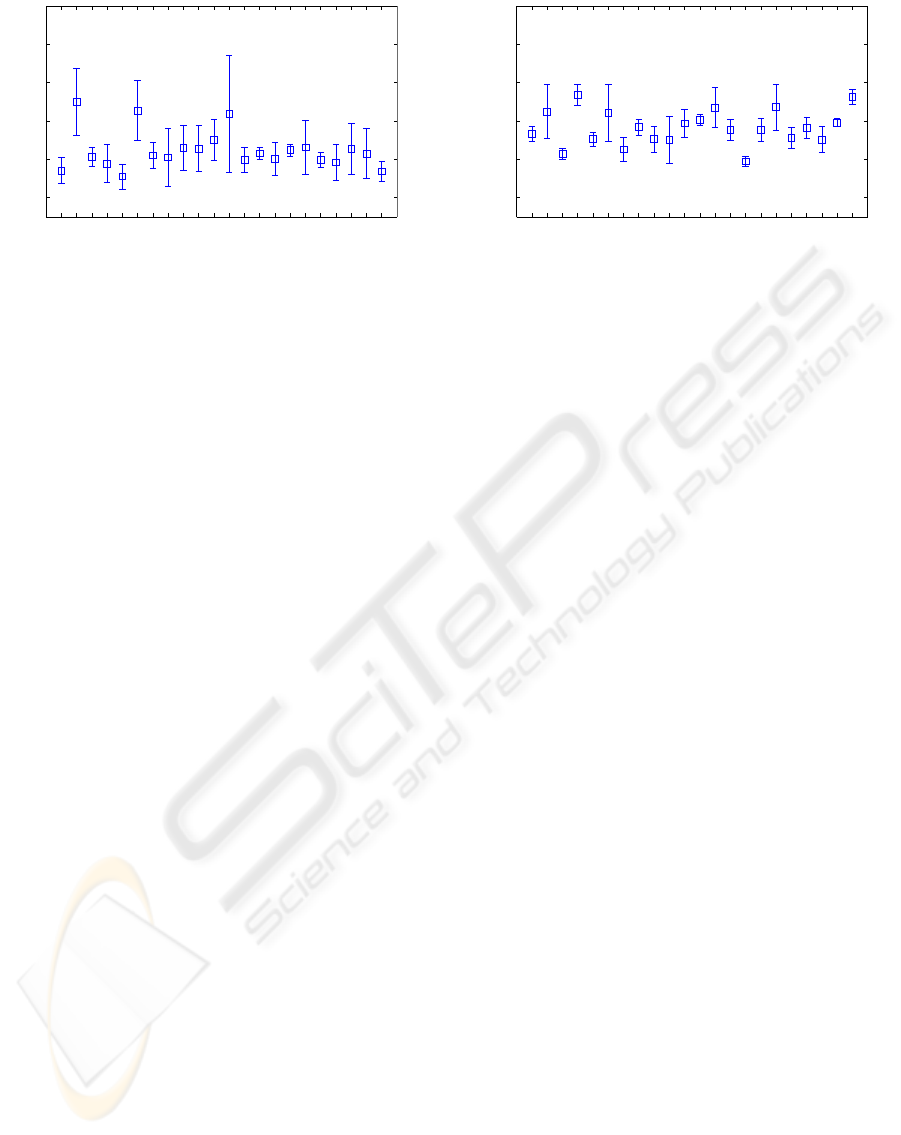
0
1
2
3
4
5
Subject
Landmark Distance [pixel]
Figure 5: Mean and standard deviation of the distance be-
tween estimated and hand-labeled landmarks used for pose
estimation for each subject (Person-specific AAM).
of 74 people in a typical access control scenario under
active near-infrared illumination. The subjects move
in-front of the camera and were asked to speak to
recreate a realistic scenario.
5.1 Model Fitting
To evaluate the performance of the AAM fitting al-
gorithm with smooth warp function, 5 images of 22
subjects from the TUNIR database were labeled in a
semi-automatic way with 67 landmarks. Before fit-
ting, the shapes were prepositioned according to the
pupil positions, as described in Section 2.1. A hi-
erarchical approach with two levels was chosen. To
evaluate the fitting ability of the algorithm and for
comparison, an experiment with known subject but
novel image was conducted. Person-specific active
appearance models were trained for each subject and
evaluated in a leave-one-out cross-validation manner.
90% of shape variance and 95 % of appearance vari-
ance of each training set were retained in the model.
This corresponds to the optimal settings for the ex-
periment with generic active appearance models de-
scribed below. In Figure 5 the mean and standard de-
viation of the distance between the estimated and the
hand-labeled landmarks are shown for each subject.
Only the landmarks which are used for pose estima-
tion contribute to the evaluation of the landmark dis-
tance.
Of more interest for the desired field of applica-
tion is the performance with subjects not seen during
training. In a second experiment generic active ap-
pearance models were trained from all but one sub-
ject. All images of the remaining identity were used
to evaluate the performance of the fitting algorithm.
Of interest is again the distance between the estimated
and the hand-labeled landmarks used for pose estima-
tion. This is shown in Figure 6.
As expected, the mean distance between estimated
0
1
2
3
4
5
Subject
Landmark Distance [pixel]
Figure 6: Mean and standard deviation of the distance be-
tween estimated and hand-labeled landmarks used for pose
estimation for each subject (Generic AAM).
and hand-labeled landmarks is lower for person spe-
cific active appearance models. Nevertheless, the to-
tal mean distance is also just 1.8 pixels for generic ac-
tive appearance models. In many cases the estimated
landmarks fit well the face components but do not
match the hand-labeled landmarks. This is because
the hand-labeled positioning is not necessary the op-
timum one. Data refitting (Gross et al., 2005) could
improve the performance. After a visual inspection of
the estimated landmarks, an error up to 3pixels was
considered as good performance for the application.
5.2 Pose Estimation
To test the accuracy of the pose estimation algo-
rithm quantitatively, we used the three-dimensional
Candide-3 model. Of interest was the quality of
the pose estimation from landmarks perturbed in the
range of what can be expected from the AAM fitting
algorithm. The Candide-3 model was situated in 729
different positions. We obtained simulated landmarks
by projecting the three-dimensional model points per-
spectively to an image plane corresponding to the
application scenario. We uniformly perturbed these
landmarks from 1 pixels to 10 pixels and estimated the
pose using the algorithm described in Section 4.
In Figure 7, the mean distance of the true model
points to the model points of the Candide-3 model
with estimated pose for different ranges of landmark
perturbation is shown. Figure 7 shows that for a per-
turbation between 3 and 4 pixels, the mean model
point distance is just around 7pixels.
A typical result of pose estimation is shown in Fig-
ure 8. Since the posture of the subjects in-front of the
camera is not known for the test images of the TU-
NIR database, the performance could only be evalu-
ated qualitatively for this database.
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
504
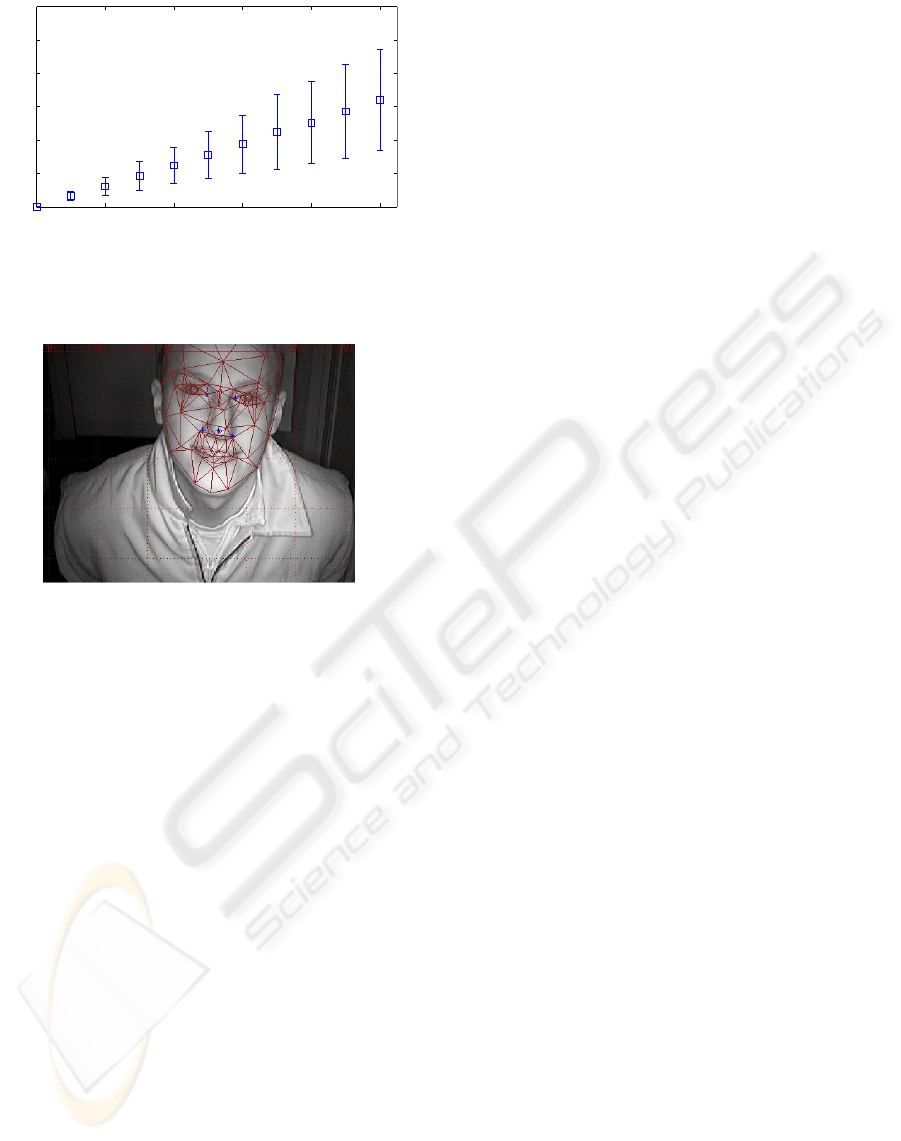
0 2 4 6 8 10
0
5
10
15
20
25
30
Landmark Perturbation [pixel]
Model Point Distance
Figure 7: Mean and standard deviation of the distance be-
tween true model points and model points with estimated
pose for different ranges of landmark perturbation.
Figure 8: The estimated pose of a subject of the TUNIR
database.
6 CONCLUSIONS
We presented an approach for facial pose estimation
from two-dimensional images using active appear-
ance models. Only a generic three-dimensional face
model is required for pose estimation. We formulated
the active appearance model fitting algorithm in an
efficient manner with a smooth warp function. Our
experiments show that the fitting accuracy of the al-
gorithm is sufficient to estimate the pose from the de-
tected landmark positions. Estimated poses from test
images of the TUNIR database emphasize this result
qualitatively.
ACKNOWLEDGEMENTS
This work is part of the project KabTec – Modulares
integriertes Sicherheitssystem funded by the German
Federal Ministry of Economics and Technology.
REFERENCES
Ahlberg, J. (2001). Candide-3 – an updated parame-
terized face. Technical Report LiTH-ISY-R-2326,
Dept. of Electrical Engineering, Linköping Univer-
sity, Linköping, Sweden.
Amberg, B., Blake, A., and Vetter, T. (2009). On compo-
sitional image alignment, with an application to ac-
tive appearance models. In Proc. IEEE Conference
on Computer Vision and Pattern Recognition (CVPR
2009), pages 1714–1721.
Baker, S., Gross, R., and Matthews, I. (2003). Lucas-
Kanade 20 years on: A unifying framework: Part 3.
Technical Report CMU-RI-TR-03-35, Robotics Insti-
tute, Carnegie Mellon University, Pittsburgh, PA.
Bookstein, F. (1989). Principal warps: thin-plate splines
and the decomposition of deformations. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
11(6):567–585.
Cootes, T., Edwards, G., and Taylor, C. (2001). Active ap-
pearance models. IEEE Transactions on Pattern Anal-
ysis and Machine Intelligence, 23(6):681–685.
Cootes, T. and Taylor, C. (2004). Statistical models of ap-
pearance for computer vision. Technical report, Uni-
versity of Manchester, Manchester, U.K.
DeMenthon, D. F. and Davis, L. S. (1995). Model-based
object pose in 25 lines of code. International Journal
of Computer Vision, 15(1-2):123–141.
Dornaika, F. and Ahlberg, J. (2006). Fitting 3d face mod-
els for tracking and active appearance model training.
Image and Vision Computing, 24(9):1010 – 1024.
Gernoth, T. and Grigat, R.-R. (2010). Camera characteri-
zation for face recognition under active near-infrared
illumination. In Proc. SPIE, volume 7529, page
75290Z.
Glasbey, C. A. and Mardia, K. V. (1998). A review of
image-warping methods. Journal of Applied Statis-
tics, 25(2):155–171.
Gross, R., Matthews, I., and Baker, S. (2005). Generic vs.
person specific active appearance models. Image and
Vision Computing, 23(1):1080–1093.
Martins, P. and Batista, J. (2008). Monocular head pose
estimation. In Proc. 5th international conference on
Image Analysis and Recognition (ICIAR ’08), pages
357–368.
Matthews, I. and Baker, S. (2004). Active appearance mod-
els revisited. International Journal of Computer Vi-
sion, 60(2):135–164.
Matthews, I., Xiao, J., and Baker, S. (2007). 2d vs. 3d de-
formable face models: Representational power, con-
struction, and real-time fitting. International Journal
of Computer Vision, 75(1):93–113.
Murphy-Chutorian, E. and Trivedi, M. (2009). Head pose
estimation in computer vision: A survey. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
31(4):607–626.
FACIAL POSE ESTIMATION USING ACTIVE APPEARANCE MODELS AND A GENERIC FACE MODEL
505

Phillips, P. J., Scruggs, W. T., O’Toole, A. J., Flynn, P. J.,
Bowyer, K. W., Schott, C. L., and Sharpe, M. (2007).
FRVT 2006 and ICE 2006 Large-Scale Results. Tech-
nical Report NISTIR 7408, National Institute of Stan-
dards and Technology, Gaithersburg, MD.
Stegmann, M. B., Fisker, R., Ersbøll, B. K., Thodberg,
H. H., and Hyldstrup, L. (2000). Active appearance
models: Theory and cases. In Proc. 9th Danish Conf.
Pattern Recognition and Image Analysis, pages 49–
57.
Zhao, S. and Grigat, R.-R. (2006). Robust eye detection
under active infrared illumination. In Proc. 18th In-
ternational Conference on Pattern Recognition (ICPR
2006), pages 481– 484.
Zhao, S., Kricke, R., and Grigat, R.-R. (2007). Tunir: A
multi-modal database for person authentication under
near infrared illumination. In Proc. 6th WSEAS Inter-
national Conference on Signal Processing, Robotics
and Automation (ISPRA 2007), Corfu, Greece.
Zhao, W., Chellappa, R., Phillips, P. J., and Rosenfeld, A.
(2003). Face recognition: A literature survey. ACM
Computing Surveys, 35(4):399–458.
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
506
