
INCREMENTAL LEARNING AND VALIDATION OF SEQUENTIAL
PREDICTORS IN VIDEO BROWSING APPLICATION
David Hurych and Tom
´
a
ˇ
s Svoboda
Center for Machine Perception, Department of Cybernetics, Faculty of Electrical Engineering
Czech Technical University in Prague, Karlovo N
´
am
ˇ
est
´
ı 13, Prague, Czech Republic
Keywords:
Sequential, Linear, Predictor, Video, Browsing, Unsupervised, Incremental, Learning.
Abstract:
Loss-of-track detection (tracking validation) and automatic tracker adaptation to new object appearances are
attractive topics in computer vision. We apply very efficient learnable sequential predictors in order to ad-
dress both issues. Validation is done by clustering of the sequential predictor responses. No aditional object
model for validation is needed. The paper also proposes an incremental learning procedure that accommodates
changing object appearance, which mainly improves the recall of the tracker/detector. Exemplars for the in-
cremental learning are collected automatically, no user interaction is required. The aditional training examples
are selected automatically using the tracker stability computed for each potential aditional training example.
Coupled with a sparsely applied SIFT or SURF based detector the method is employed for object localization
in videos. Our Matlab implementation scans videosequences up to eight times faster than the actual frame
rate. A standard-length movie can be thus searched through in terms of minutes.
1 INTRODUCTION
Learnable visual trackers have recently proved their
wide applicability in object tracking in video. The
tracking poses essentially two main challenges:
i) adapting to changing appearance, ii) detecting
tracker failure – loss of track. The paper addresses
both issues but contributes mainly to the adaptation
problem. We propose to solve the adaptation prob-
lem by an incremental learning, which accomodates
changing appearance whilst tracking. We also suggest
a fast method for tracking validation (i.e. loss-of-track
detection) which uses the same model as for tracking
and does not need any additional object model. The
predictor needs only a very short (seconds) offline
learning stage before the tracking starts. The track-
ing itself is then tremendously efficient, much faster
than real-time.
Tracker adaptation and loss-of-track detection
have been active topics for many years. Jepson et
al. (Jepson et al., 2008) proposed WSL tracker (3
components - Wandering, Stable and Lost) - an adap-
tive appearance model which deals with partial occlu-
sion and change in object appearance. It is a wavelet-
based model, which allows to maintain a natural mea-
sure of the stability of the observed image structure
during tracking. This approach is robust and works
well with slowly changing object appearance. How-
ever, a high computational overhead precludes real-
time applications. Lim et al. (Ross et al., 2008) pro-
pose an algorithm for incremental learning and adap-
tation of low dimensional eigenspace object represen-
tation with update of the sample mean and eigenbasis.
Their approach appears to be robust to sudden illu-
mination changes and does not need offline learning
phase before tracking however, the algorithm speed
does not fit our needs. For template-based track-
ers the adaptation means continuous update of the
tracked template. Tracking systems with naive up-
dates update the template after every tracking step
(Shi and Tomasi, 1994). Sub-pixel errors inherent to
each match are stored in each update and these errors
gradually accumulate resulting in the template drift-
ing off the feature. Despite this drawback, naive up-
date is still usually better choice than no update at all.
Matthews et al. in (Matthews et al., 2004) propose a
strategic update approach, which trades off mismatch
error and drift. It is a simple but effective extension of
the naive update. There are two template models kept
during the tracking. The updating template is used
for an initial alignment and the template from the first
frame is than used in the error correction phase after
alignment. If the size of correction is too large, the
algorithm acts conservatively by preventing the tem-
467
Hurych D. and Svoboda T. (2010).
INCREMENTAL LEARNING AND VALIDATION OF SEQUENTIAL PREDICTORS IN VIDEO BROWSING APPLICATION.
In Proceedings of the International Conference on Computer Vision Theory and Applications, pages 467-474
DOI: 10.5220/0002836504670474
Copyright
c
SciTePress
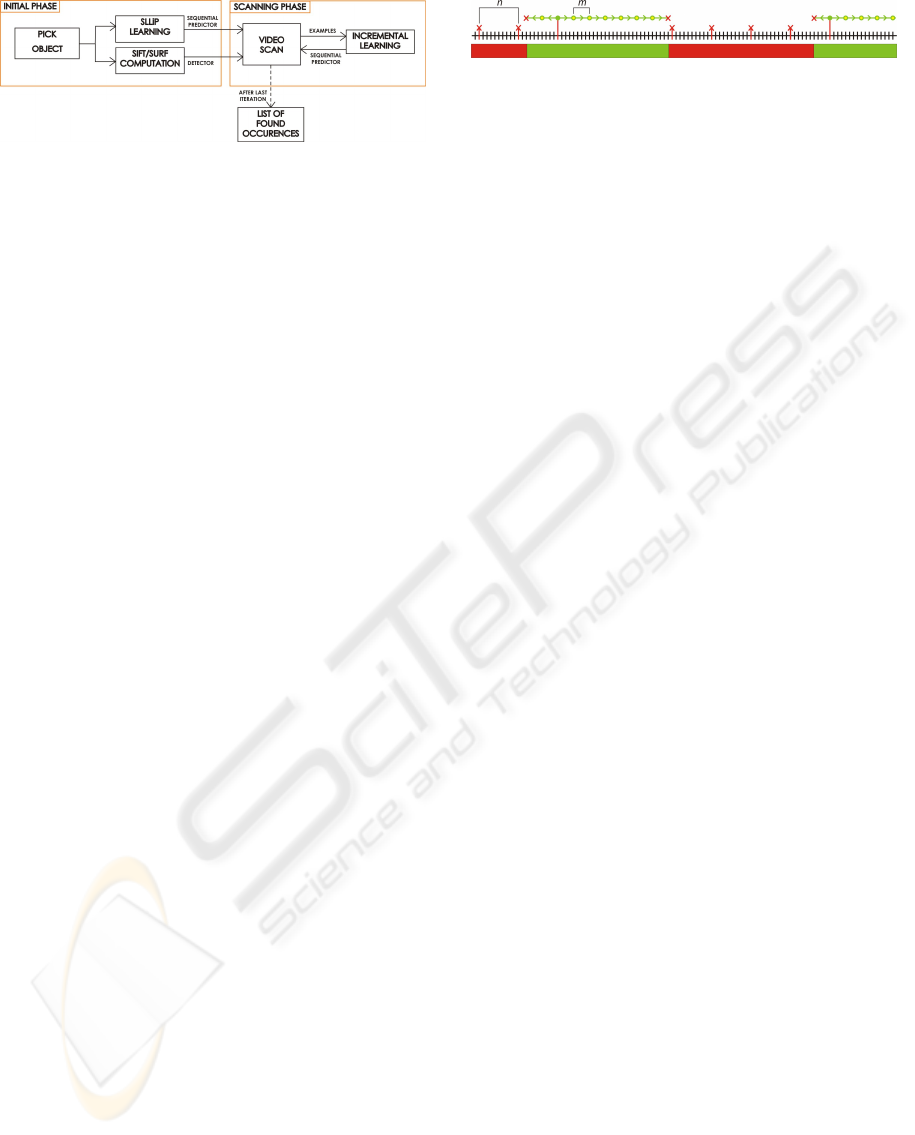
Figure 1: Video browsing procedure.
plate to be updated from the current frame.
Recently, some authors wanted to bypass an ex-
haustive off-line learning stage. Purely on-line learn-
ing has been proposed by Ellis et al. in (Ellis
et al., 2008), where a bank of local linear predic-
tors (LLiPs), spatially disposed over the object, are
on-line learned and the appearance model of the ob-
ject is learnt on-the-fly by clustering sub-sampled im-
age templates. The templates are clustered using the
medoidshift algorithm. The clusters of appearance
templates allow to identify different views or aspects
of the target and also allow to choose the bank of
LLiPs most suitable for current appearance. The al-
gorithm also evaluates the performance of particular
LLiPs. When the performance of some predictor is
too low, it is discarded and a new predictor is learned
on-line as a replacement. In comparison to our work,
we do not throw away the predictors in sequence, but
we incrementally train them with new object appear-
ances in order to improve their performance.
Our learnable and adaptive tracking method, cou-
pled with a sparsely applied SIFT (Lowe, 2004) or
SURF (Bay et al., 2006) based detector, is applied for
faster than real-time linear video browsing. The goal
is to find all object occurrences in a movie. One of
possible solutions of video browsing task would be to
use a general object detector in every frame. As it ap-
pears (Yilmaz et al., 2006), (Murphy-Chutorian and
Trivedi, 2009), it is preferable to use a combination
of an object detector and a tracker in order to speed
up the browsing algorithm and also to increase the
true positive detections. We indeed aim at processing
rates higher than real-time which would allow almost
interactive processing of lengthy videos. Our yet pre-
liminary Matlab implementation can search through
videos up to eight times faster than the real video
frame rate.
2 LEARNING, TRACKING,
VALIDATION AND
INCREMENTAL LEARNING
User initiates the whole process by selecting a rect-
angular patch with the object of interest in one im-
Figure 2: A typical video scan process. Vertical red lines
depict frames, where the object detection was run. Red
cross means negative detection or tracking failure. Green
line shows backward and forward object tracking. Green
circle means positive object detection and yellow circle de-
picts successful validation.
age. This sample patch is artificially perturbed and
a sequential predictor is learned (Zimmermann et al.,
2009). Computation of a few SIFT or SURF object
descriptors completes the initial phase of the algo-
rithm, see Figure 1. The scanning phase of algorithm
combines predictor based tracking, its validation, and
a sparse object detection. The predictor is incremen-
tally re-trained for new object appearances. Exam-
ples for the incremental learning are selected automat-
ically with no user interaction.
The scanning phase starts with the object detec-
tion running every n−th frame (typically with the step
of 20 frames) until the first object location is found.
The tracker starts from this frame on the detected po-
sition both in backward and forward directions. Back-
ward tracking scans frames which were skipped dur-
ing the detection phase and runs until the loss-of-track
or until it reaches the frame with last found occur-
rence of the object. Forward tracking runs until the
loss-of-track or end of sequence. The detector starts
again once the track is lost. Tracking itself is vali-
dated every m−th frame (typically every 10 frames).
The scanning procedure is depicted on Figure 2.
One object sample represents only one object ap-
pearance. The predictor is incrementally re-trained as
more examples become available from the scanning
procedure. The next iteration naturally scans only im-
ages where the object was not tracked in the preceding
iterations.
Training examples for incremental learning are se-
lected automatically. The most problematic images-
examples are actually the most useful for incremental
training of the predictor. In order to evaluate the use-
fulness of a particular example we suggest a stability
measure. The measure is based on few extra predic-
tions of the predictor on a single frame. It means,
that we let the sequential predictor track the object in
a single static image and we observe the predictors’
behavior. See Section 2.3 for more details.
The sequential linear predictor validates itself.
Naturally, an object detector may be also used to val-
idate the tracking. For example well trained face de-
tector will do the same or better job when used to val-
idate human face tracking. Motivation for using the
sequential predictor for validation is its extreme ef-
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
468

ficiency, and robust performance. For more details
about the tracking validation, see section 2.2.
2.1 Incremental Learning of Sequential
Learnable Linear Predictor
We extend min-max learning of the Sequential learn-
able linear predictors (SLLiP) by Zimmermann et
al. (Zimmermann et al., 2009) in order to predict not
only translation but also the affine deformation of the
object. Next extension is the incremental learning of
new object appearances. The predictor essentially es-
timates motion and deformation parameters directly
from image intensities. It requires an offline learning
stage before the tracking starts. The learning stage
consists of generating exemplars and estimation of re-
gression functions. We use 2 SLLiPs - first for 2D mo-
tion estimation (2 parameters) and second for affine
warp estimation (4 parameters). We have experimen-
tally verified that, especially for low number of train-
ing examples, this configuration is more stable than
using just one SLLiP to predict all 6 parameters at
once. Using smaller training set decreases the nec-
essary learning time which is important for the fore-
seen applications. Because of speed we opted for least
squares learning of SLLiPs similarly, as suggested by
Zimmermann et al. in their any-time learning algo-
rithm (Zimmermann et al., 2009).
Let denote the translation parameters vector t
t
=
[∆x,∆y]
T
estimated by the first SLLiP, and the affine
warp is parameterized by the parameters vector t
a
=
[α,β,∆s
x
,∆s
y
]
T
which is estimated by the second
SLLiP. The 2 × 2 affine warp matrix A is computed
as
A = R
α
R
−β
SR
β
, (1)
where R are standard 2D rotation matrices parameter-
ized by the angles α,β and S is the scale matrix
S =
1 + ∆s
x
0
0 1 + ∆s
y
. (2)
Than the image point x = [x,y]
T
is transformed be-
tween two consecutive images using estimated pa-
rameters accordingly
x
0
= Ax + t
t
(3)
= R
α
R
−β
SR
β
x + t
t
,
Tracking, learning and incremental learning will
be explained for SLLiP with general parameters vec-
tor t. Equations are valid for both SLLiPs, which we
use. SLLiP is simply a sequence of linear predic-
tors. Predictors in this sequence estimate the param-
eters one after each other (see equation 4), thus each
improving the result of previous predictor estimation
and lowering the error of estimation. SLLiP tracks
according to
t
1
= H
1
I (X
1
) (4)
t
2
= H
2
I (t
1
◦ X
2
)
t
3
= H
3
I (t
2
◦ X
3
)
.
.
.
t =
(i=1,...,k)
t
i
,
where I is current image and X is a set of 2D co-
ordinates spread over the the object patch - it is called
support set. I (X ) is a vector of image intensities col-
lected at image coordinates X. Operation ◦ means
transformation of support set points using Equation 3,
i.e. aligning the support set to fit the object using pa-
rameters estimated by the previous predictor in the se-
quence. Final result of the prediction is vector t which
combines results of all predictions in the sequence.
The model θ
s
for SLLiP is formed by the sequence
of predictors θ
s
=
|{
H
1
,X
1
}
,
{
H
2
,X
2
}
,...,
{
H
k
,X
k
}|
.
Matrices H
1
,H
2
,...,H
k
are linear regression matrices
which are learned from training data.
In our algorithm, the SLLiP is learned from one
image only and it is incrementally (re-)learned after
each video scan. A few thousands of training ex-
amples are artificially generated from the first image
using random perturbations of parameters in vector
t, warping the support set accordingly and collect-
ing the image intensities. The column vectors of col-
lected image intensities are stored in matrix D
i
and
perturbed parameters in matrix T
i
columnwise. Each
regression matrix in SLLiP is trained using the least
squares method H
i
= T
i
D
T
i
D
i
D
T
i
−1
. The initial learn-
ing phase takes 5 or 6 seconds on a standard PC.
More images (around 400) are selected for
incremental learning from all images gathered during
last scanning iteration. From each of the additional
exemplars 10 training examples are generated. This
procedure provides additional 4000 training examples
after each particular video scan. It is worth to note
that this process is completely automatic, no user
interaction is required. Incremental learning com-
prises update of regression matrices H
i
,i = 1,...,k.
An efficient way of updating regression matrices was
proposed by Hinterstoisser et al. in (Hinterstoisser
et al., 2008).
Each regression matrix H
i
may be computed alter-
natively
H
i
= Y
i
Z
i
, (5)
where Y
i
= T
i
D
T
i
and Z
i
=
D
i
D
T
i
−1
. Lets denote
Y
j
i
,Z
j
i
, where j indexes the training examples. New
INCREMENTAL LEARNING AND VALIDATION OF SEQUENTIAL PREDICTORS IN VIDEO BROWSING
APPLICATION
469

training example d = I (X) with parameters t is incor-
porated into the predictor as follows
Y
j+1
i
= Y
j
i
+ td
T
(6)
Z
j+1
i
= Z
j
i
−
Z
j
i
dd
T
Z
j
i
1 + d
T
Z
j
i
d
.
After updating matrices Y
i
and Z
i
we may also update
the regression matrices H
i
using equation 5. For more
details about incremental learning see (Hinterstoisser
et al., 2008).
2.2 Validation by Voting
To validate the tracking (i.e. detecting loss-of-track)
we use the same sequential linear predictor as for
tracking. We utilize the fact that the predictor is
trained to point to the center of this object when ini-
tialized in a close neighborhood. On the contrary,
when initialized on the background, the estimation of
2D motion is expected to be random.
We initialize the predictor several times on a regu-
lar grid (validation grid - depicted by red crosses in
Figure 3) in the close neighborhood of current po-
sition of the tracker. The close neighborhood is de-
fined as 2D motion range, for which the predictor was
trained. In our case the range is ±(patch width/4)
and ±(patch height/4). The validation grid is de-
formed according to estimated parameters. Then we
observe the 2D vectors, which should point to the cen-
ter of the object, i.e. current tracker position in the
image. When all (or sufficient number of) the vec-
tors point to the same pixel, which is also the current
tracker position, we consider the tracker to be on its
track. Otherwise, when the 2D vectors are pointing to
some random directions, we say that the track is lost,
see Figure 3.
A threshold value is needed in order to recognize
if the sum of votes, which point to the center of object,
is big enough to pass the validation. The threshold is
set automatically from examples collected during the
video scan. At first iteration, when no threshold is
available, first few (tens) validations are done by the
object detector and SLLiP simultaneously. When the
detector votes for positive validation, also the current
sum of votes is taken as positive example. Negative
examples (sums of votes) are collected by placing the
validation grid on other parts of the image, where the
object does not appear. Gaussian distributions are fit-
ted into positive and negative examples and the clas-
sical Bayes threshold is found. Both negative and
positive cases are considered to appear equally likely.
In subsequent iterations, the additional training exam-
ples are also used for threshold update.
Figure 3: Example of predictor validation. The first row
shows successful validation of clock tracking. Second row
shows loss-of-track caused by a sudden scene change just
after a video cut. Red crosses depict pixels, where the pre-
dictor was initialized - validation grid. Right column of
pictures illustrates the idea of validation using linear pre-
dictors and the middle column shows the collected votes for
the center of the object in normalized space.
Figure 4: Blue bars depict sorted stability numbers. The
left most clock image was used for predictor training. The
other occurrences obtained during tracking were automat-
ically evaluated as more difficult examples for the tracker.
Clearly, the higher stability measure, the more difficult case
for the predictor.
2.3 Stability Measure and Examples
Selection for the Incremental
Learning
Selecting only relevant examples for training may
speed up the learning as well as increase the perfor-
mance. Clearly relevant examples are those which
contain the object but were not included in the pre-
vious training examples. The predictor has of course
problems to handle new object appearances and it is
likely, that it will loose the track. It is reasonable
to presume, that these new difficult (and useful) ex-
amples should appear near frames, where the loss-of-
track was detected. We need to examine the object oc-
currences, which appeared near loss-of-track frames,
in order to capture the most interesting examples for
incremental learning. We propose the stability mea-
sure for evaluation of these object occurrences.
When we let the predictor track object on a sin-
gle frame, we would expect the tracker to stay still in
objects’ position with no additional change of param-
eters. However, due to inherent noise in the data the
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
470

Figure 5: Illustration of examples selection for incremental
learning. Green line depicts one interval - subsequence of
video frames, where the object was found during scanning
procedure. Only few images near the beginning and end
of the interval are examined. Yellow circles mean success-
ful validation. The black curve depicts computed stability
measure on particular frames. The examples with stability
number above the blue line are considered as useful for in-
cremental learning. Selected examples are marked by red
arrows.
predictor predicts non-zero parameters even when ini-
tiated on the correct position. The parameters changes
are accumulated and their sum-of-squares is com-
puted after 10 tracking steps. Let t be the vector of
parameters estimated during tracking and p
i
vector of
parameters obtained in i−th step of this single frame
tracking. The stability number s for current frame is
computed as s =
∑
10
i=1
k t − p
i
k
2
. Clearly, the higher
value the more difficult example, see Figure 4. Pa-
rameters changes in both vectors are made relative to
particular ranges, in order to obtain stability number,
which is not dependent on different parameters units.
Using this stability number we may evaluate how use-
ful (difficult) is the examined object occurrence.
We use this stability number to select a fixed num-
ber of additional training examples from each inter-
val obtained during one video scan. Each interval is
a continuous subsequence of images from the whole
video sequence (one interval is depicted as a green
line in Figure 2).
We search for the best additional training exam-
ples near the borders of each interval. We go through
fixed number of images from the start of the interval
forwards and backwards from the end of the interval,
while computing the stability number on tracker po-
sitions. Finally, the algorithm selects the examples
with high stability number for incremental learning.
Tracker positions in these images have also passed
validation and we expect them to be well aligned to
the object. The procedure of examples selection is
depicted in Figure 5.
3 EXPERIMENTS
Real sequences used in experiments includes an
episode from Fawlty Towers series (33 minutes,
720 × 576), and Groundhog Day movie (1 hour 37
minutes, 640 × 384). Several objects were tested, see
Figure 6: Tested objects are marked with red rectangle.
Figure 7: Here you may see examples of human face data
used in experiment. All images are extracted from one
video sequence. Note significant deformations and varia-
tions in illumination.
Figure 6. The ground truth data for the Groundhog
Day were kindly provided by Josef
ˇ
Sivic and they are
the same as in (Sivic and Zisserman, 2009). We have
manually labeled ground truth for two tested objects
in Fawlty Towers. Third tested sequence captures a
human moving in front of the camera (2 minutes 50
seconds, 640 × 480), see Figure 7. Matlab implemen-
tation of the algorithm was used for all experiments.
SIFT and SURF object detectors are publicly avail-
able MEX implementations. Mostly, the standard pre-
cision and recall are used to evaluate the results. Let
T P denote the true positives, FP denote the false pos-
itives and FN denote the false negatives. Than the
precision and recall are computed accordingly
precision =
T P
T P + FP
(7)
recall =
T P
T P + FN
. (8)
The experiments are organized as follows. The first
experiment (Section 3.1) shows the effect of incre-
mental learning on resulting precision and recall. In
Section 3.2 we evaluate the overall performance of
the algorithm. Next we compare tracking validation
by SIFT and by SLLiP. Finally Table 3, Table 4 and
Table 5 show comparison of SIFT detection in every
frame with one iteration of our algorithm.
INCREMENTAL LEARNING AND VALIDATION OF SEQUENTIAL PREDICTORS IN VIDEO BROWSING
APPLICATION
471
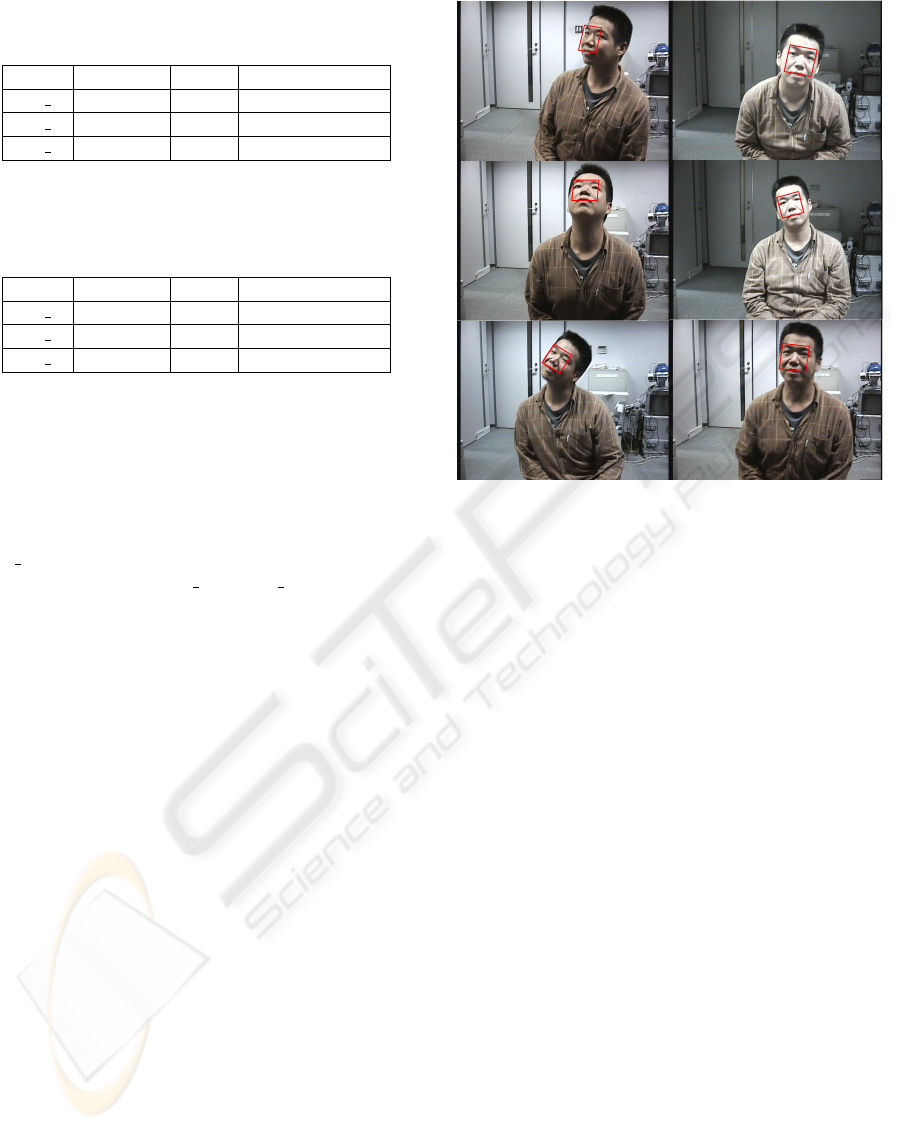
Table 1: Incremental learning evaluation for the clock ob-
ject from the Fawlty towers episode. The video scan was
running 76 frames per second in average.
precision recall cumulative time
iter 0 0.86 0.61 13 min 42 sec
iter 1 0.81 0.63 23 min 18 sec
iter 2 0.81 0.64 32 min 21 sec
Table 2: Incremental learning evaluation for human face.
The first iteration of video scan was running 21 frames per
second in average. Browsing time was increased by using
the face detector instead of SURF.
precision recall cumulative time
iter 0 0.99 0.70 4 min 5 sec
iter 1 0.98 0.79 5 min 2 sec
iter 2 0.98 0.81 5 min 27 sec
3.1 Incremental Learning Evaluation
This experiment shows the improvement gained by
the automatic incremental learning. At first we run
one iteration of video scan using sequential predic-
tor trained on one image only (in Table 1 denoted as
iter 0). Next, we evaluate results after first and second
incremental learning (iter 1 and iter 2). Two objects
were tested. First was the picture object in Fawlty
Towers video (see Figure 6 top right image). The
SURF based detector was used for picture detection
with step n = 20 and sequential predictor for valida-
tion with step m = 10. Incremental learning improves
the recall while keeping high precision, see Table 1.
Second tested object was a human face (see Fig-
ure 7). In this case the object was difficult to track
with SLLiP learned only from one image, because
the appearance of the face changed significantly dur-
ing the sequence. The lighting conditions were chal-
lenging and the human face undergoes various rota-
tions and scale changes. We have chosen this se-
quence in combination with the face detector (instead
of SIFT/SURF) to see how the incremental learning
helps to improve tracking results on complex non-
rigid object. In this case incremental learning also
improved the performance of the tracker. See Table 2
for results.
The high precision obtained in the face experiment
was caused by flawless face detection, which did not
return any false positive. You may see a few images
of SLLiP tracker aligned on human face on Figure 8.
3.2 Results of Detection and Tracking
One iteration of the algorithm in Fawlty Towers se-
ries runs 3−times faster than real-time and more than
Figure 8: Examples of face tracking results. Red rectangle
depicts SLLiP tracker aligned on human face.
8−times faster for the Groundhog Day movie. The
detector was run every n = 20 frames and valida-
tion every m = 10 frames while tracking. In the se-
quence with human face the browsing time was al-
most twice the real-time, even for detection step n =
40. It was caused by the face detector which runs
much slower than SURF. The difference in browsing
times in Fawlty Towers and Groundhog Day is caused
mainly by the different video resolution. Processing
of higher resolution images and more complex scenes
is slown down by the object detector. Even shorter
browsing times may be achieved by increasing the de-
tection interval n. Selecting the right interval depends
on our expectation of the shortest time interval, where
the object may appear. Reasonable values for detec-
tion interval are between 20 and 60 frames. Increas-
ing the validation interval m to more than 10 generates
more false positives and since the validation runs very
fast, it is not necessary to validate with a bigger step.
Next we compare the performance of predictor
validation with SIFT validation. The average time of
one SIFT validation was 179 milliseconds and aver-
age time of one predictor validation was 33 millisec-
onds. The resulting recall of video browsing for clock
object was 0.58 with SIFT and 0.61 with predictor
validation, while the precision was 0.9 for SIFT val-
idation and 0.86 for SLLiP validation. Recall for the
picture object was 0.94 with SIFT validation and 0.95
with predictor, while the precision was 0.84 for both.
Predictor validation gives comparable precision and
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
472
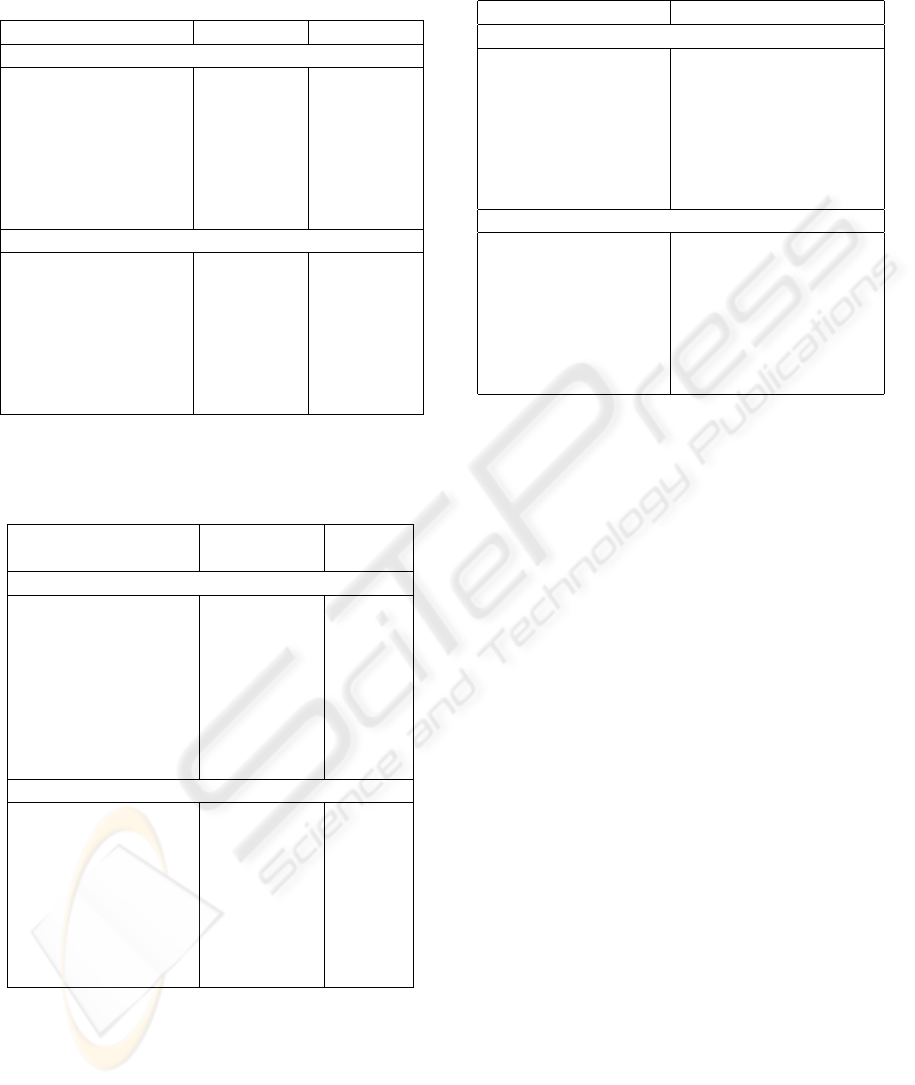
Table 3: Comparison of SIFT object detection only and one
iteration of our algorithm on Fawlty Towers - clock and pic-
ture.
clock (FT) picture
SIFT detector on every frame - without tracking
browsing time 32 h. 56 m. 33 h. 29 m.
scanning speed (fps) 0.4 0.4
obtained occurrences 2440 2140
true positives 2411 1996
false positives 29 144
precision 0.99 0.93
recall 0.43 0.89
SURF detect., SLLiP track. and valid.
browsing time 13 m. 42 s. 11 m. 40 s.
scanning speed (fps) 61 71
obtained occurrences 4026 2520
true positives 3462 2131
false positives 564 389
precision 0.86 0.85
recall 0.61 0.95
Table 4: Comparison of SIFT object detection only and one
iteration of our algorithm on Groundhog Day - alarm clock
and clock.
alarm clock clock
(GhD)
SIFT detector on every frame - without tracking
browsing time 48 h. 43 m. 48 h.
13 m.
scanning speed (fps) 0.8 0.8
obtained occurrences 1888 855
true positives 1811 801
false positives 77 54
precision 0.96 0.94
recall 0.37 0.29
SURF detect., SLLiP track. and valid.
browsing time 16 m. 46 s. 12 m.
48 s.
scanning speed (fps) 144 189
obtained occurrences 1345 2034
true positives 1125 1520
false positives 220 514
precision 0.84 0.75
recall 0.23 0.55
recall in much shorter time, which also saves time in
the whole scanning iteration. Tables 3, 4 and 5 show
the results for 5 tested objects obtained in one scan-
ning iteration. The results of the video browsing al-
gorithm are compared to the results produced by the
SIFT detector only.
SURF detection on every frame was tested too, but
the results contained large number of false positives.
Table 5: Comparison of SIFT object detection only and one
iteration of our algorithm on Groundhog Day - PHIL sign.
PHIL sign
SIFT detector on every frame - without tracking
browsing time 48 h. 7 m.
scanning speed (fps) 0.8
obtained occurrences 2597
true positives 2293
false positives 304
precision 0.88
recall 0.72
SURF detect., SLLiP track. and valid.
browsing time 15 m. 15 s.
scanning speed (fps) 159
obtained occurrences 4038
true positives 2361
false positives 1677
precision 0.58
recall 0.74
Recall was comparable to SIFT detector, but preci-
sion was very low. We are using the SURF detector
because it runs much faster than SIFT, but we need to
use predictor validation after every positive detection
because of the large number of false positives. The
results show that even after a single iteration the al-
gorithm gives results comparable with SIFT detection
only.
4 CONCLUSIONS
We have shown that an incremental learning of se-
quential predictor significantly improves its robust-
ness. It increases the recall while keeping high preci-
sion. Proposed method for collecting additional train-
ing examples is completely automatic and requires
no user interaction. Stability number well describes
the condition of the tracker on particular image and
prooves to be good criteria for training examples se-
lection. Validation by clustering SLLiP responses
works reliably and very fast.
When coupled with a sparsely applied object de-
tector the system can search for objects through
videos several times faster than real time despite the
current rather preliminary Matlab implementation.
The complete system for video browsing works very
well with simple objects. Performance for more com-
plex 3D objects (when using SIFT/SURF for detec-
tion) are not yet entirely satisfactory. It is mainly the
detector that hinders the recognition rate. The tracker
itself may be incrementally learned for new appear-
ances of the object and it works better with every it-
eration. This was verified on face tracking where a
INCREMENTAL LEARNING AND VALIDATION OF SEQUENTIAL PREDICTORS IN VIDEO BROWSING
APPLICATION
473

robust face detector was applied. We plan to extend
the sequential predictor in a way that would allow its
application as a detector.
REFERENCES
Bay, H., Ess, A., Tuytelaars, T., and Van Gool, L. (2006).
Speeded-up robust features. In Proceedings of IEEE
European Conference on Computer Vision, pages
404–417.
Ellis, L., Matas, J., and Bowden, R. (2008). On-line learn-
ing and partitioning of linear displacement predictors
for tracking. In Proceedings of the 19th British Ma-
chine Vision Conference, pages 33–42.
Hinterstoisser, S., Benhimane, S., Navab, N., Fua, P., and
Lepetit, V. (2008). Online learning of patch perspec-
tive rectification for efficient object detection. In Con-
ference on Computer Vision and Pattern Recognition,
pages 1–8.
Jepson, A., Fleet, D., and El-Maraghi, T. (2008). Robust on-
line appearance models for visual tracking. In IEEE
Conference on Computer Vision and Pattern Recogni-
tion, volume 1, pages 415–422.
Lowe, D. (2004). Distinctive image features from scale-
invariant keypoints. International Journal on Com-
puter Vision, 60(2):91–110.
Matthews, I., Ishikawa, T., and Baker, S. (2004). The tem-
plate update problem. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 26(6):810–815.
Murphy-Chutorian, E. and Trivedi, M. (2009). Head pose
estimation in computer vision: A survey. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
31(4):607–626.
Ross, D., Lim, J., Lin, R., and Yang, M. (2008). Incremen-
tal learning for robust visual tracking. International
Journal of Computer Vision, 77(1-3):125–141.
Shi, J. and Tomasi, C. (1994). Good features to track. In
Proceedings of IEEE Computer Society Conference
on Computer Vision and Pattern Recognition, pages
593–600.
Sivic, J. and Zisserman, A. (2009). Efficient visual search
of videos cast as text retrieval. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
31(4):591–606.
Yilmaz, A., Javed, O., and Shah, M. (2006). Object track-
ing: A survey. ACM Computing Surveys (CSUR),
38(4):13–36.
Zimmermann, K., Svoboda, T., and Matas, J. (2009). Any-
time learning for the NoSLLiP tracker. Image and
Vision Computing, Special Issue: Perception Action
Learning, 27(11):1695–1701.
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
474
