
AN EVALUATION OF LOCAL IMAGE FEATURES FOR
OBJECT CLASS RECOGNITION
Saiful Islam and Andrzej Sluzek
Centre for Computational Intelligence, School of Computer Engineering
Nanyang Technological University, Singapore 639798, Singapore
Keywords: Local Image Feature, Object Class Recognition, Nearest Neighbour Classification.
Abstract: The use of local image features (LIF) for object class recognition is becoming increasingly popular. To
better understand the suitability and power of existing LIFs for object class recognition, a simple but useful
method is proposed in evaluation of such features. We have compared the performance of eight frequently
used LIFs by the proposed method on two popular databases. We have used F-measure criterion for this
evaluation. It is found that the individual performance of SURF and SIFT features are better than that of the
global features on ETH-80
*
database with considerably lower number of training objects. However, it may
not be good enough for more challenging object class recognition problem (e.g. Caltech-101
+
). The
evaluation of LIFs suggests the requirement for further investigation of more complementary LIFs.
1 INTRODUCTION
Object class recognition is one of the central issues
in many practical applications. For the recognition
of a partially occluded object in cluttered
environment, locally defined low level image feature
known as local image feature (LIF) is preferable
(Lowe, 2004; Mikolajczyk and Schmid, 2001). A
large number (order of hundred) of LIFs could be
extracted from an image and each of them are
represented as a vector by computing different kinds
of descriptors of such an image patch. An up-to-date
review of different methods of local feature
detection and description can be found in (Li and
Allinson, 2008).
Apparently a LIF captures description about the
appearance of an image patch. Most of these features
are primarily intended to be used for wide baseline
matching. The suitability of appearance based
existing LIFs for object class recognition of
previously unseen object is rather vague. Despite
this limitation some desperate affords of object class
recognition are made using LIF (Boiman,
Shechtman and Irani, 2008; Mikolajczyk, Leibe and
Schiele, 2006; Stark and Schiele, 2007). However,
it is generally agreed (Boiman et al, 2008; Zhang,
*
http://tahiti.mis.informatik.tu-darmstadt.de/oldmis/Research/Pro
jects/categorization/eth80-db.html
+
http://www.vision.caltech.edu/Image_Datasets/Caltech101/
Berg, Maire and Malik, 2006) that LIF-based nearest
neighbor classification method can overcome the
intra-class variation of objects in a class to some
extent.
The main purpose of this work is to investigate
the suitability of local image features currently
available in the literature for object class
recognition. In this paper, we have proposed a
method in the evaluation of existing LIFs. We
evaluated performance of some of the popular and
frequently used LIFs. Some previous works of
evaluation of LIF can be found in (Asbach, Hosten
and Unger, 2008; Stark and Schiele, 2007; Zhang
and Marszalek, 2006). Asbach et. al. (2008)
evaluated a few LIFs for face detection. Another
method of evaluation for geometric object class
recognition was reported by Stark and Schiele
(2007). Zhang and Marszalek, (2006) evaluated the
performance of kernel based method on three LIFs.
However, in this paper we have proposed a more
generic method and systematically evaluated some
of the existing LIFs used for different object
recognition problems.
We have nominated the simple nearest neighbor
based method. Eight existing LIFs are primarily
evaluated on two landmark databases: ETH-80 and
Caltech-101. We have used robust F-measure
criterion for this evaluation. It is found that SURF
and SIFT are the two best LIFs for object class
519
Islam S. and Sluzek A. (2010).
AN EVALUATION OF LOCAL IMAGE FEATURES FOR OBJECT CLASS RECOGNITION.
In Proceedings of the International Conference on Computer Vision Theory and Applications, pages 519-523
DOI: 10.5220/0002844805190523
Copyright
c
SciTePress

recognition with F-measure of 0.89 and 0.84
respectively for ETH-80 database with nine labelled
objects. The individual performance of SURF and
SIFT are better than that of the global features on
ETH-80 database (Leibe and Schiele, 2003) with
considerably lower number of labelled (training)
objects.
The outline of the paper is as follows. In Section
2 we have given a review of existing LIFs. We have
listed the LIFs considered for evaluation in this
paper. In section 3, we have described the proposed
method for evaluation. In Section 4 we have
presented experimental results of evaluation of the
LIFs.
2 REVIEW OF LIFS
The first step of LIF extraction is the detection of
interest regions. Many scale and affine invariant
region detectors have been recently proposed.
Mikolajczyk, Tuytelaars, Schmid, Zisserman, Matas,
Schaffalitzky, Kadir and Gool, (2005) has
systematically evaluated six detectors. These
detectors are generally evaluated by repeatability
and overlapping accuracy for different kinds of
transformations such as viewpoint change, rotation,
scale change, illumination change, and image blur
etc. (Bay, Ess, Tuytelaars and Gool, 2008;
Mikolajczyk et al., 2005). It was found that the
Hessian-Laplace detector has higher localization and
scale selection accuracy. In this work, we have used
this region detector to produce all the experimental
results.
There are a good number of possible descriptors
which are based on different image properties like
intensities, color, texture, edges etc. Many different
descriptors of local image patch have been proposed
in recent years. Mikolajczyk and Schmid (2005)
reviewed different distribution-based (e.g. SIFT,
GLOH, PCA-SIFT), differential-based (e.g. local jet,
steerable filter, complex filter), and moment-based
(e.g. gradient moment) descriptors and evaluated
their performance. The evaluation is based on
ground truth, i.e. matching of LIFs from a same
scene under different viewing condition (such as
viewpoint change, rotation, scale change,
illumination change, image blur etc.) It was found
that GLOH (Mikolajczyk and Schmid, 2005) and
SIFT (Lowe, 2004) are two best performing high
dimensional LIFs whereas gradient moments GM
(Mikolajczyk and Schmid, 2005) and steerable
filters SF (Freeman and Adelson, 1991) are two low
dimensional LIFs. In the proposed evaluation work,
we have considered these four LIFs together with
another medium dimensional descriptor named as
SURF (Bay et al., 2008) based on Haar wavelet
transformation. Local shape context (SC) feature as
in (Mikolajczyk and Schmid, 2005) was used by
quantizing the edge points in log-polar coordinate
system centered at the center of interest region. We
have also implemented two invariant moment based
descriptors such as CMI (color moment invariant
based descriptor of dimension 18) (Mindru et al.,
2004) and RMI (revised moment invariant based
descriptor of dimension 15) (Reiss, 1993). In total
we considered to evaluate eight LIFs. In order to
extract LIFs, we used the executables available
online for six features and implemented the CMI and
RMI based feature extraction methods
3 EVALUATION METHOD
The evaluation of different kinds of LIFs for object
class recognition is based on a simple nearest
neighbor (NN) classification method. Our objective
is to observer the inter-class discriminative and
intra-class generalization power of LIFs but not the
efficiency of the method. As suggested in (Boiman
et al., 2008), we have used the non-parametric
nearest neighbor classification method. In this
method we do not need any explicit training phase.
Suppose, we have total c classes and for each
class a set of labelled (training) images are given.
Now, the problem of object class recognition is to
assign a previously unseen object to a particular
class. There are two phases of a supervised object
classification method: training and classification. In
the training phase the classifier is trained with
features extracted from the labelled images. In the
classification phase the extracted features of a query
image are used by the classifier to decide the
appropriate class.
Section 3.1 discusses the NN-based minimum
risk Bayes classification method. Section 3.2 gives a
brief introduction of two databases. The evaluation
criterion is explained in section 3.3. Finally, in
Section 3.4 the results of empirically verification of
the robustness of the method for wide baseline
matching is presented.
3.1 NN Classification
Suppose D
i
is the set of LIFs extracted from all the
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
520

labelled images of class
ω
i
; i = 1…c. The basic idea
of the classification method is as follows. Suppose
p(
ω
i
|Q) is the probability that a query image Q
belongs to class
ω
i
. With the assumption that the
prior p(
ω
i
) is uniform, Bayes maximum a-posteriori
classifier becomes:
arg max ( | ) arg max ( | )
ii
ii
pQ pQ
ω
ωω
==
(1)
Suppose, we extract n LIFs d
1
, …, d
n
from the
query image. With Naïve-Bayes assumption (LIFs
d
1
, …, d
n
are independent given its class
ω
i
) it can be
show that
1
1
( | ) arg max ( ,..., | ) arg max ( | )
n
iniji
ii
j
pQ pd d pd
ω
ωω
=
==
∏
(2)
Taking the log probability the decision rule
becomes:
1
1
arg max ( | ) arg max ( | )
n
iji
ii
j
pQ pd
n
ω
ωω
=
==
∑
(3)
We need to estimate the probability density
p(d
j
|
ω
i
). As the number of LIFs is large the
estimation can be approximated by nonparametric
nearest neighbor method (Boiman et al., 2008). In
the following we redefine the NN method in terms
of minimum risk classification.
For a LIF d we can find the nearest neighbor
NN(d, D
i
) in class
ω
i
. In fact the distance ||d - NN(d,
D
i
)|| between d and NN(d, D
i
) defines the ‘feature-to-
class’ distance. Thus, the ‘image-to-class’ (
δ
i
)
distance can be defined by:
1
(, ) || ( , )||
n
ii j ji
j
QdNNdD
δωδ
=
== −
∑
(4)
Obviously we would prefer to minimize the
‘image-to-class’ distance. So taking the ‘image-to-
class’ distance as the risk we can obtain the
following minimum risk classification.
When we assign a query to a particular class
there is a risk R(
ω
i
|Q). Bayes minimum risk
classification tries to minimize the risk.
arg min ( | ) arg min ; 1,...,
ii
ii
R
Qic
ωω δ
===
(5)
We expect that an ideal LIF minimizes image-to-
class distance for the intended class and maximizes
it for other classes.
3.2 Databases
There are a quiet good number of databases publicly
available for object class recognition. We have
selected two of them for the evaluation. The first one
is ETH-80 and the other is Caltech-101. The main
motivation behind the selection of these two
databases is that it would be possible to carry out
object class recognition experiments with different
difficulty levels.
In ETH-80 database, there are eight classes of
objects. In each of the classes there are ten objects.
Each object is represented by 41 views spaced
evenly over the upper viewing hemisphere. Figure 1
shows the classes of this database. On the other
hand, there are 101 classes in Caltech-101 database
with large intra-class appearance and shape
variability. In our experiments we have used 85
classes having at least 40 images.
Figure 1: Classes of ETH-80 databases.
3.3 Evaluation Criterion
A robust measure is used as the criterion for
evaluation of the performance of different LIFs for
object class recognition. F-measure is based on the
number of true positive (TP), false positive (FP)
recognitions with respect to number of positive (P)
examples. In a classification process we present
some positive (P) and some negative examples of
each class to the classifier and count the number of
true positive (TP) and false positive (FP)
classifications. The F-measure can be computed
form TP and FP as follows:
2 TP
Fmeasure
PTPFP
×
−=
++
(6)
3.4 Empirical Verification
As the LIFs are originally designed for matching of
wide baseline images, we wish to empirically verify
the performance of the proposed method for
recognition of object using test images which are
essentially the images of all the same object with a
different viewpoints. For this experiment we use the
ETH-80 database. Here we set aside four images
AN EVALUATION OF LOCAL IMAGE FEATURES FOR OBJECT CLASS RECOGNITION
521

from each of 10 objects (in total 40 images) for each
class as a classification set. Rest of the images is
used as the labelled images. Table 1 gives the
average F-measure for each of the class. It can be
seen that on the average SURF has the highest score
(0.984) and SIFT has the second highest score
(0.981) of F-measure. For other LIFs the
performances are inferior. However, the result
indicates that proposed evaluation framework
perform well with wide base-line classification set
given an ideal LIF.
Table 1: F-measure for wide baseline matching for all
classes of ETH-80 database.
Object SIFT SURF GLOH GM CMI
Apple 0.97 0.99 0.93 0.91 0.79
Car 0.99 0.96 0.97 0.96 0.71
Cow 0.98 0.98 0.95 0.82 0.53
Cup 0.99 1.00 0.97 0.97 0.81
Dog 0.97 0.99 0.92 0.87 0.53
Horse 0.98 0.97 0.94 0.87 0.62
Pear 0.98 0.99 0.95 0.95 0.55
Tomato 0.98 1.00 0.96 0.88 0.93
Average 0.981 0.984 0.95 0.90 0.68
4 RESULTS OF EVALUATION
We have implemented the evaluation method using
c++. All the LIFs extracted from the labelled images
are indexed in k-d trees. For each class we use a
separate k-d tree. Now, for each image of a
classification set we extract LIFs. For each of the
LIFs the k-d tree is used to search the nearest
neighbor using Euclidian distance measure. One of
the important objectives of this evaluation is to
examine the effect of number of labelled (training)
objects. For that we carried out experiments with
different number of labelled object for each class.
We have observed the performance of all the LIFs
with such experiments. In the following two
subsections we have discussed the experimental
results for two databases.
4.1 ETH-80 Database
For ETH-80 database, we carried out experiments
with different size of labelled image set. We leave
one object, five objects and nine objects out for each
class for three different sets of experiments. The
remaining objects in each class are used as
classification set for the respective experiment. For
each class we get some positive examples and some
negative examples. For instance, with the nine
objects as labelled images, we presented 41 images
as positive examples and 41×7 images as negative
examples for each class. We counted the true
positives and false positives for each class. We
carried out multiple such tests for a particular size of
labelled images and computed the average of true
positives and false positives for each class. Finally
we computed F-measure from the averages using
Equations (6).
We repeated the experiments for all eight LIFs.
Figure 2 shows the F-measures for different number
of objects as labelled images. From the figure, it can
be seen that generally the performance improve with
increasing number of labelled objects. Individually
SURF is best feature followed by SIFT and GLOH.
Using SURF we get 0.90 of F-measure, which is
better than that of any individual global features as
reported in (Leibe and Schiele, 2003). Here we use
considerably smaller number of labelled objects.
However, it can be observed that RMI just performs
randomly.
Figure 2: F-measures for ETH-80 database.
4.2 Caltech-101 Database
For Caltech-101 database we also carried three sets
of experiments with different size (such as 10, 20
and 30) of labelled image set. We considered all 85
classes having at least 40 images each. The images
for a labelled set are randomly selected form the first
40 images of the class and the remaining of the 40
images are used as classification set. As in ETH-80,
we extract all LIFs of labelled image set for each
class and use a separate k-d tree. In an experiment
we presented some positive examples and some
negative examples. We counted the number of true
positives and false positives for each class. We
carried out several such experiments for a particular
size of labelled images and computed the average of
true positives and false positives for each class.
Finally we computed the F-measure from the
averages using Equations (6).
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
522
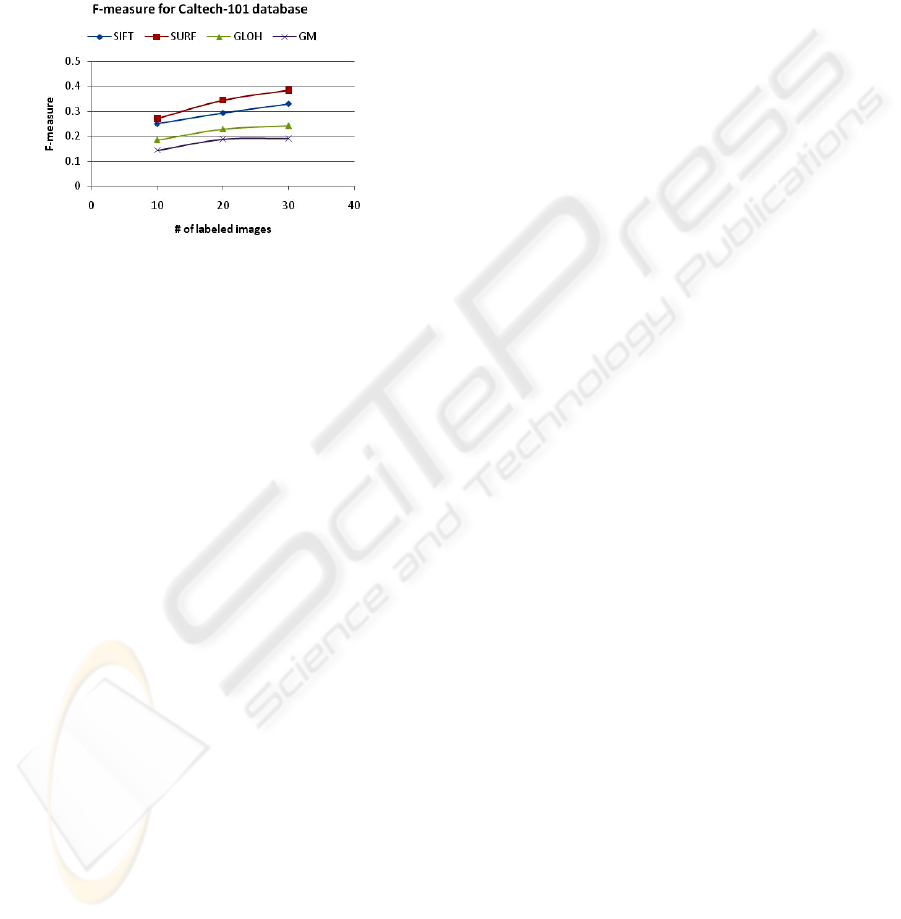
Here we considered only best four LIFs obtained
from experiments on ETH-80. Figure 3 shows the F-
measures for all the classes. As before, generally the
performance is improved with increased number of
labelled objects. Individually the performance for
SURF is the best followed by SIFT, GLOH, and GM
as well. However, the F-measure drops sharply with
respect to ETH-80 dataset (e.g. to 0.38 from 0.89 for
experiments with 30 labelled images).
Figure 3: F-measures for Caltech-101 database.
5 CONCLUSIONS
In this paper, we have proposed a useful method in
evaluation of existing local image features for object
class recognition. The proposed method is based on
a simple nearest neighbor method. In this work,
eight prominent and frequently used local features
are evaluated using two popular databases. We have
used F-measure criterion to analyze the performance
of the LIFs
It is found that average individual performance
for SURF and SIFT are quite satisfactory (with F-
measure of 0.89 and 0.84 respectively) on ETH-80
database. They outperform the individual performers
of different global features as considered in (Leibe
and Schiele, 2003). Here we used considerably
lower number of labelled images. GLOH and GM
features are the next best features for object class
recognition. However, on Caltech-101 database this
performance drops sharply (e.g. to 0.29 from 0.84
for SIFT). This may caused by different reasons.
Most obvious among them is that without any
quantization the feature space gets more crowded
with the increase of object class and thereby the
chance of misclassification increases. However, it
the evident that we need to extract more
complementary image features or alternatively to
combine several features for better performance of
object class recognition.
ACKNOWLEDGEMENTS
The research presented in this paper is a part of
A*STAR Science \& Engineering Research Council
grant 072 134 0052. The financial support of SERC
is gratefully acknowledged.
REFERENCES
Asbach, M., Hosten, P. and Unger, M. (2008). An
Evaluation of Local Features for Face Detection and
Localization. Ninth Int. Workshop on Image Analysis
for Multimedia Interactive Services.
Bay, H., Ess, A., Tuytelaars, T. and Gool, L. V. (2008).
Speeded-up Robust Features (SURF). Computer
Vision and Image Understanding 110, 346-359
Boiman, O., Shechtman, E. and Irani, M. (2008). In
Defense of Nearest-Neighbor Based Image
Classification. IEEE Conf. on CVPR, 1 - 8.
Freeman, W. and Adelson, E. (1991). The Design and Use
of Steerable Filters. IEEE Transactions on Pattern
Analysis and Machine Intelligence: 13, 891-906.
Leibe, B. and Schiele, B. (2003). Analyzing Appearance
and Contour Based Methods for Object
Categorization. IEEE Conf. on CVPR, Wisconsin.
Li, J. and Allinson, N. M. (2008). A Comprehensive
Review of Current Local Features for Computer
Vision. Neurocomputing, 71, 1771-1787.
Lowe, D. G. (2004). Distinctive Image Features from
Scale-Invariant Keypoints. IJCV: 60, 91-110.
Mikolajczyk, K., Leibe, B. and Schiele, B. (2006).
Multiple Object Class Detection with a Generative
Model. IEEE Conf. on CVPR, 26 - 36
Mikolajczyk, K. and Schmid, C. (2005). A Performance
Evaluation of Local Descriptors. IEEE Transactions
on Pattern Analysis and Machine Intelligence: 27,
1615-1630.
Mikolajczyk, K., Tuytelaars, T., Schmid, C., Zisserman,
A., Matas, J., Schaffalitzky, F., Kadir, T. and Gool, L.
V. (2005). A Comparison of Affine Region Detectors
IJCV: 65, 43-72
Mindru, F., Tuytelaars, T., Gool, L. V. and Moons, T.
(2004). Moment Invariants for Recognition under
Changing Viewpoint and Illumination. Computer
Vision and Image Understanding: 94, 3-27.
Reiss, T. H. (1993). Recognizing Planar Objects Using
Invariant Image Features, Springer-Verlag.
Stark, M. and Schiele, B. (2007). How Good Are Local
Features for Classes of Geometric Objects. IEEE 11th
International Conference on Computer Vision, 1 - 8.
Zhang, H., Berg, A. C., Maire, M. and Malik, J. (2006).
Svm-Knn: Discriminative Nearest Neighbor
Classification for Visual Category Recognition. IEEE
Conf. on CVPR, 2126- 2136.
Zhang, J. and Marszalek, M. (2006). Local Features and
Kernels for Classification of Texture and Object
Categories: A Comprehensive Study. IJCV: 73, 213 -
238.
AN EVALUATION OF LOCAL IMAGE FEATURES FOR OBJECT CLASS RECOGNITION
523
