
TEMPORAL PHOTON DIFFERENTIALS
L. Schjøth
1
, J. R. Frisvad
2
, K. Erleben
1
and J. Sporring
1
1
eScience Center, Department of Computer Science, University of Copenhagen, Denmark
2
Department of Informatics and Mathematical Modelling,Technical University of Denmark, Denmark
Keywords:
Photon mapping, Ray differentials, First order structure.
Abstract:
The finite frame rate also used in computer animated films is cause of adverse temporal aliasing effects. Most
noticeable of these is a stroboscopic effect that is seen as intermittent movement of fast moving illumination.
This effect can be mitigated using non-zero shutter times, effectively, constituting a temporal smoothing of
rapidly changing illumination. In global illumination temporal smoothing can be achieved with distribution ray
tracing (Cook et al., 1984). Unfortunately, this, and resembling methods, requires a high temporal resolution
as samples has to be drawn from in-between frames. We present a novel method which is able to produce high
quality temporal smoothing for indirect illumination without using in-between frames. Our method is based
on ray differentials (Igehy, 1999) as it has been extended in (Sporring et al., 2009). Light rays are traced as
bundles creating footprints, which are used to reconstruct indirect illumination. These footprints expand into
the temporal domain such that light rays interacting with non-static scene elements draw a path reacting to the
elements movement.
1 INTRODUCTION
Rendering animated scenes with global illumina-
tion methods produces some interesting problems,
where the perhaps most prominent problem is alias-
ing caused by the fact that the temporal domain is
discretized at a often very low resolution.
Feature films usually shot a frame rate around 25
frames per second (fps). Despite the fact that the hu-
man eye is much more perceptible than 25 fps, this
frame rate still gives a seemingly fluid motion when
a film is produced with a traditional movie camera.
However, were we to produce a feature film of an an-
imated virtual scene using an unmodified global illu-
mination method at a frame rate of 25 fps, fluid mo-
tion is not guaranteed. A typical unmodified global
illumination method produces images at instant time
in the temporal domain. This procedure can induce
temporal aliasing, which is seen as an adverse strobo-
scopic effect, where the illumination changes rapidly
over time. A traditional-camera produced feature
film will avoid this problem because the camera has
non-zero exposure time. This means that camera-
perceived illumination is averaged over the exposure
time. In effect, high frequency motion is blurred and
therefore seems fluid. This effect is often called mo-
tion blur. A temporal aliasing defect not solved by
this blurring is the wagon-wheel effect, which is seen
as a backwards turning of the spokes of a wheel due
to temporal under sampling. However, as our method
does not address this particular problem, it will not be
discussed further here. A survey paper for global illu-
mination and rendering solutions exploiting temporal
coherence is given in (Tawara et al., 2004).
Brute force methods, such as the accumulation
buffer (Haeberli and Akeley, 1990), average together
in-between frames in order to achieve motion blur.
These methods can achieve arbitrary high accuracy
but are often prohibitively expensive as full render-
ings typically have to be made of a large number of
in-between frames.
Different global illumination methods also ad-
dress temporal aliasing by simulating motion blur.
Distribution ray tracing (Cook et al., 1984) achieves
motion blur by stochastically sampling the temporal
domain as well as the spatial. In (Myszkowski et al.,
2001) the authors adaptively controlled the tempo-
ral and spatial sampling resolution by examining lo-
cal variations of indirect illumination over time and
space in a pilot estimate. In (Egan et al., 2009) motion
blur is modeled as a wedge in the frequency domain.
Ray tracing methods using ray differentials have been
studied in (Igehy, 1999; Christensen et al., 2003; Du-
rand et al., 2005; Gjøl et al., 2008).
54
Schjøth L., R. Frisvad J., Erleben K. and Sporring J. (2010).
TEMPORAL PHOTON DIFFERENTIALS.
In Proceedings of the International Conference on Computer Graphics Theory and Applications, pages 54-61
DOI: 10.5220/0002847800540061
Copyright
c
SciTePress

With time dependent photon mapping (Cam-
marano and Jensen, 2002), photon mapping was ex-
tended such that indirect illumination was estimated
using a four dimensional photon map that expanded
into the temporal domain. In this manner photons
were filtered not only based on their spatial position
but also their temporal.
A problem common to the discussed methods is
that they all rely on information from in-between
frames in order to achieve motion blur. Having this
information available places certain restrictions on the
animated scene; because a scene description is needed
at arbitrary time steps, movement of scene elements
either needs to be described as a an analytic function,
or movement has to be interpolated between frames.
The analytical approach is by far the best but demands
a certain complexity of the animation application, as
well as a tight link to the rendering software. The
interpolative approach is error prone, since the ani-
mation curve might not be linear. Furthermore, some
accelerator for ray-object intersection (such as a bsp-
tree) typically needs to be either rebuild, or at least
updated an extra number of times equal to the num-
ber in-between frames needed.
In this paper, we propose a method that produces
motion blur, and which neither needs in-between
frames, nor to over-smooth indirect illumination with
high temporal frequency. Our proposed method is
an extension of photon differentials (Schjøth et al.,
2007). It takes advantage of ray differentials (Igehy,
1999) and their extension into the temporal domain
(Sporring et al., 2009), and since velocity is a rela-
tive concept, out methods handles camera as well as
object motion. We call this method temporal photon
differentials.
2 TEMPORAL PHOTON
DIFFERENTIALS
In our method each photon represents a beam of light
that expands, contracts and reshapes in space and time
as it propagates through the scene. We keep track of
a photon’s coherence by deriving the first order struc-
ture of its direction and position with respect to both
time and space as it traverse the scene.
Representing a photon as a parameterized ray
with origin in x
x
x and the direction ω
ω
ω, we describe the
derivatives of a photon with two Jacobian matrices;
one for the positional derivatives and one for the
directional derivatives. The positional derivatives are
then given by
Dx
x
x =
=
∂x
∂u
∂x
∂v
∂x
t
∂y
∂u
∂y
∂v
∂y
∂t
∂z
∂u
∂z
∂v
∂z
∂t
=
D
u
x
x
x D
v
x
x
x D
t
x
x
x
, (1)
where Dx
x
x is the Jacobian of the positional deriva-
tives, and D
u
x
x
x, D
v
x
x
x and D
t
x
x
x are column vectors that
describe the positional derivatives with respect to the
scalar variables u, v, and t. The spatial variables u
and v relate to light sources, from which the photon
differential was emitted.
We write the directional derivatives of the photon
as
Dω
ω
ω =
D
u
ω
ω
ω D
v
ω
ω
ω D
t
ω
ω
ω
. (2)
Exactly, as with photon differentials, D
u
ω
ω
ω, D
v
ω
ω
ω,
D
u
x
x
x and D
v
x
x
x are spatially dependent differential vec-
tors. The directional and positional differential vec-
tors with respect to time are new to photon differ-
entials; they are noted as D
t
ω
ω
ω and D
t
x
x
x in the above
equations. For a scene, in which the light sources
are static, the time dependent differential vectors will,
initially, be zero. If the scene, additionally, is com-
pletely static, they will remain zero-vectors through
out the photon’s traversal of the scene. In this specific
case, our method will behave exactly as ordinary pho-
ton differentials: the photons will expand and contract
depending on the reflections and refraction encoun-
tered during tracing, and their spatial dependent posi-
tional differential vectors will form a footprint, which
is used in the reconstruction of the indirect illumina-
tion.
On the other hand, if we have a dynamic scene,
then photon differentials interacting with a non-static
scene element will attain non-zero time dependent
differential vectors. In this case, the derivatives of a
dynamic scene-element’s surface positions or normals
with respect to time will be non-zero:
D
t
n
n
n 6= 0
0
0, (3)
or
D
t
q
q
q 6= 0
0
0, (4)
where n
n
n is a surface normal to the element and q
q
q is
a position on the element’s surface. This again will
affect the time dependent derivatives of a photon in-
teracting with the scene element.
Sporring et al. evaluates the full differentials for
a parameterized ray. This allows for an extension of
parameters such that the derivatives of a ray can be
considered with respect to time. From Sporring et
TEMPORAL PHOTON DIFFERENTIALS
55

x
D
v
x
D
u
Figure 1: Spatial filter kernel shaped by the positional dif-
ferential vectors, D
u
x
x
x and D
v
x
x
x.
Sporring et al. evaluates the full differentials for
a parameterized ray. This allows for an extension of
parameters such that the derivatives of a ray can be
considered with respect to time. From Sporring et
al.’s equations for transfer, reflection and refraction,
we observe that non-zero time-dependent element dif-
ferentials (eg. D
t
q
q
q) propagate through these interac-
tions to the differentials of the interacting photon. We
exploit this behavior such that a footprint from a pho-
ton differential traveling in a dynamic scene not only
describes the spatial coherence of the ray but also the
temporal coherence of the ray.
When a photon differential hits a surface, its po-
sitional differential vectors are projected onto the sur-
face’s tangent plane at the intersection point. The spa-
tial footprint of the photon differential is the area on
the tangent plane of a parallelogram spanned by the
positional differential vectors. The spatial footprint
can be used to shape an anisotropic filter kernel as il-
lustrated in Figure 1.
The time dependent positional differential vector,
D
t
x
x
x, tells us either how the photon’s footprint is go-
ing to behave over consecutive frames, or how the
footprint has behaved in former frames. In the for-
mer case, the direction of D
t
x
x
x predicts the direction
on the surface that the footprint will move, and the
magnitude of the vector predicts how far the footprint
is likely to move. Basically, the magnitude and the
direction of D
t
x
x
x depends on the estimation method
used to calculate the time derivatives of an element,
which again depends on the geometry representation.
In the present method, we simply use finite differ-
ences and triangle meshes. Except for the last frame,
in which we use backward differences, we estimate
the time dependent differentials using forward differ-
ences. When we want to predict how a footprint is go-
ing to behave, having intersected a moving element,
we estimate the element’s positional time derivatives
by
D
t
q
q
q
f
= e(q
q
q
f +1
−q
q
q
f
), (5)
where D
t
q
q
q
f
is the derivative of the vertex q
f
with re-
x’
pd
x
x
D
t
x
pd
p
d
(a)
x
pd
x
D
t
pd
(b)
Figure 2: Temporal filter kernel shaped by a spatial kernels
translation along the time dependent differential vector.
spect to time at frame step f , and e is the exposure.
The exposure is a parameter for how much we trust
our prediction. Generally, it works as a smoothing pa-
rameter for the time dependent footprint that decides
how much motion blur we induce. Its unit is given
in frames as it depends on the movement of the scene
elements between frames. The exposure is related to
the exposure time by the frame rate such that the ex-
posure time is equal to the exposure divided by the
frame rate.
The time dependent footprint constitutes an inte-
gration of the spatial footprint over the time depen-
dent differential vector such that the spatial footprint
is elongated along the vector. We achieve this by
translating the spatial footprint along the time depen-
dent differential vector. As in the spatial case, the time
dependent footprint describes a filter kernel. In Fig-
ure 2(a), D
t
x
x
x
pd
is the time dependent differential vec-
tor, x
x
x
pd
is the center of the spatial kernel, and x
x
x is the
estimation point, for which the kernel weight is esti-
mated.
The kernel is translated along D
t
x
x
x
pd
to the point,
x
x
x
0
pd
, on the line segment, (x
x
x
pd
→x
x
x
pd
+D
t
x
x
x
pd
), where
x
x
x
0
pd
is the point on the segment having the shortest
distance to the estimation point, x
x
x. Using x
x
x
0
pd
as cen-
ter for the spatial kernel, the resulting time dependent
kernel will achieve an elongated shape as illustrated
in Figure 2(b).
The irradiance of the time dependent photon dif-
ferential is estimated as
E
pd
= Φ
pd
/A
pd
, (6)
where Φ
pd
is the radiant flux carried by the photon,
and A
pd
is the surface area, to which the radiant flux
Figure 1: Spatial filter kernel shaped by the positional dif-
ferential vectors, D
u
x
x
x and D
v
x
x
x.
al.’s equations for transfer, reflection and refraction,
we observe that non-zero time-dependent element dif-
ferentials (eg. D
t
q
q
q) propagate through these interac-
tions to the differentials of the interacting photon. We
exploit this behavior such that a footprint from a pho-
ton differential traveling in a dynamic scene not only
describes the spatial coherence of the ray but also the
temporal coherence of the ray.
When a photon differential hits a surface, its po-
sitional differential vectors are projected onto the sur-
face’s tangent plane at the intersection point. The spa-
tial footprint of the photon differential is the area on
the tangent plane of a parallelogram spanned by the
positional differential vectors. The spatial footprint
can be used to shape an anisotropic filter kernel as il-
lustrated in Figure 1.
The time dependent positional differential vector,
D
t
x
x
x, tells us either how the photon’s footprint is go-
ing to behave over consecutive frames, or how the
footprint has behaved in former frames. In the for-
mer case, the direction of D
t
x
x
x predicts the direction
on the surface that the footprint will move, and the
magnitude of the vector predicts how far the footprint
is likely to move. Basically, the magnitude and the
direction of D
t
x
x
x depends on the estimation method
used to calculate the time derivatives of an element,
which again depends on the geometry representation.
In the present method, we simply use finite differ-
ences and triangle meshes. Except for the last frame,
in which we use backward differences, we estimate
the time dependent differentials using forward differ-
ences. When we want to predict how a footprint is go-
ing to behave, having intersected a moving element,
we estimate the element’s positional time derivatives
by
D
t
q
q
q
f
= e(q
q
q
f +1
−q
q
q
f
), (5)
where D
t
q
q
q
f
is the derivative of the vertex q
f
with re-
spect to time at frame step f , and e is the exposure.
The exposure is a parameter for how much we trust
our prediction. Generally, it works as a smoothing pa-
rameter for the time dependent footprint that decides
x’
pd
x
x
D
t
x
pd
p
d
(a)
x
pd
x
D
t
pd
(b)
Figure 2: Temporal filter kernel shaped by a spatial kernels
translation along the time dependent differential vector.
how much motion blur we induce. Its unit is given
in frames as it depends on the movement of the scene
elements between frames. The exposure is related to
the exposure time by the frame rate such that the ex-
posure time is equal to the exposure divided by the
frame rate.
The time dependent footprint constitutes an inte-
gration of the spatial footprint over the time depen-
dent differential vector such that the spatial footprint
is elongated along the vector. We achieve this by
translating the spatial footprint along the time depen-
dent differential vector. As in the spatial case, the time
dependent footprint describes a filter kernel. In Fig-
ure 2(a), D
t
x
x
x
pd
is the time dependent differential vec-
tor, x
x
x
pd
is the center of the spatial kernel, and x
x
x is the
estimation point, for which the kernel weight is esti-
mated.
The kernel is translated along D
t
x
x
x
pd
to the point,
x
x
x
0
pd
, on the line segment, (x
x
x
pd
→x
x
x
pd
+D
t
x
x
x
pd
), where
x
x
x
0
pd
is the point on the segment having the shortest
distance to the estimation point, x
x
x. Using x
x
x
0
pd
as cen-
ter for the spatial kernel, the resulting time dependent
kernel will achieve an elongated shape as illustrated
in Figure 2(b).
The irradiance of the time dependent photon dif-
ferential is estimated as
E
pd
= Φ
pd
/A
pd
, (6)
where Φ
pd
is the radiant flux carried by the photon,
and A
pd
is the surface area, to which the radiant flux
is incident. For the time dependent photon differen-
tial, this area is the area of the time dependent kernel.
Referring to Figure 3 this area is calculated as
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
56
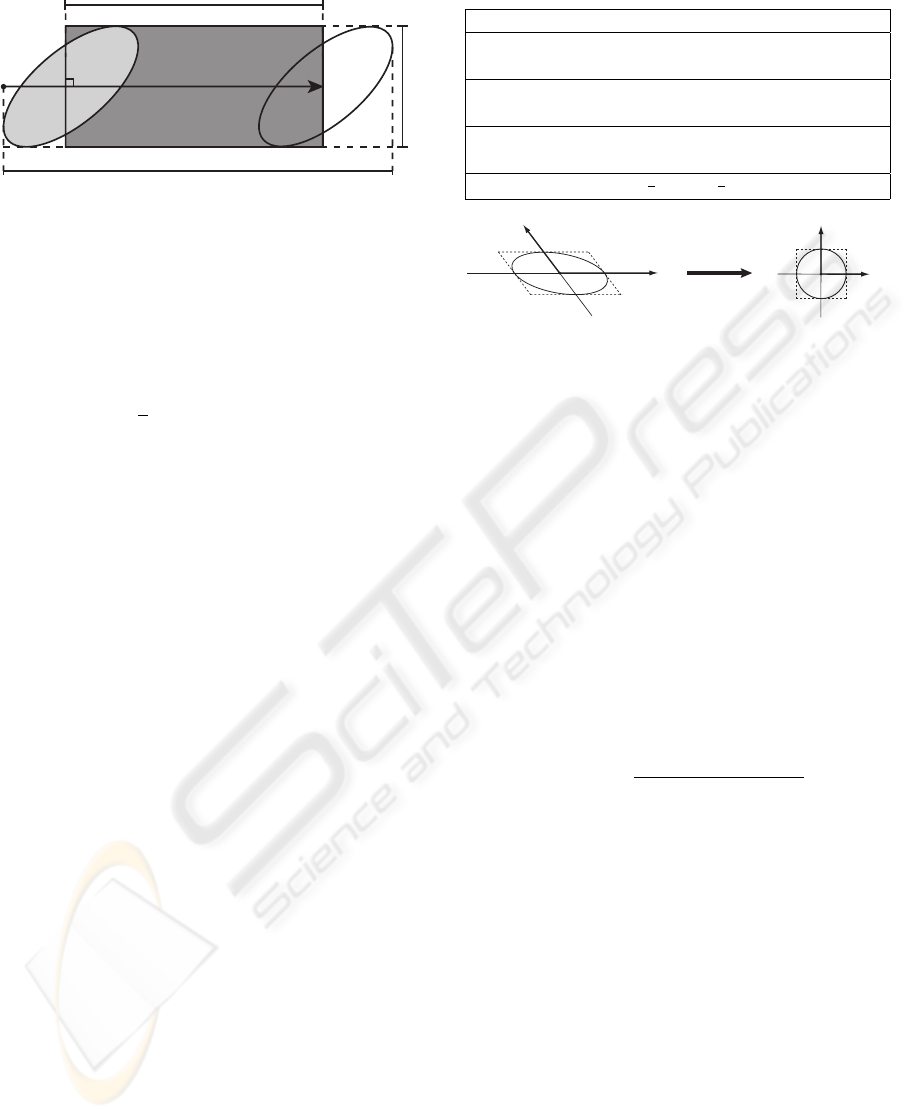
l
h
t
x|
|D
t
x
t
Figure 3: First order approximation of the sweeping area of
the kernel on the surface of an object induced by relative
motion of the light source and the object. The approximate
area swept is the sum of the area of the kernel and the rect-
angle spanned by D
t
x
x
x and l, where x
x
x
t
is the initial central
point of projection, D
t
x
x
x is the vector of change of x
x
x
t
by
time, and l is the spread of the kernel in the direction per-
pendicular to D
t
x
x
x.
A
pd
=
1
4
π|D
u
x
x
x ×D
v
x
x
x|+l|D
t
x
x
x|, (7)
where the first term is the area of the spatial kernel and
the second term is the area of a rectangle. One side
of the rectangle is the length of the time dependent
differential vector and the other is the length of the
spatial kernel in a direction perpendicular to the time
dependent differential vector.
Having defined the time dependent kernel as well
as the irradiance of the photon differential, we can
now formulate a radiance estimate for temporal pho-
ton differentials.
2.1 The Temporal Radiance Estimate
Reflected radiance from temporal photon differentials
can be estimated by
b
L
r
(x
x
x,ω
ω
ω) =
n
∑
pd=1
f
r
(x
x
x,ω
ω
ω
pd
,ω
ω
ω)E
pd
(x
x
x,ω
ω
ω
pd
)
K
s
(x
x
x −x
x
x
0
pd
)
T
M
M
M
T
pd
M
M
M
pd
(x
x
x −x
x
x
0
pd
)
, (8)
where x
x
x is a position on an illuminated surface, ω
ω
ω is
reflection direction considered, f
r
is the bi-directional
reflectance function, ω
ω
ω
pd
is the incident ray direction,
x
x
x
0
pd
is the translated center of spatial kernel, E
pd
is
the irradiance of the temporal photon differential, K
s
is a bivariate kernel function from Table 1, and M
M
M
pd
is a matrix that transforms from world coordinates to
the filter space of the spatial kernel, as illustrated in
Figure 4.
The temporal radiance estimate can be extended
as to include filtering in time. One intuitive approach
is to weight the part of the differential, which is clos-
est in time the highest, where the time is estimated
Table 1: Symmetric bivariate kernel functions.
Kernel K
s
(y)
Uniform
1 if y < 1,
0 otherwise
Epanechnikov
2(1 −y) if y < 1,
0 otherwise
Biweight
3(1 −y)
2
if y < 1,
0 otherwise
Gaussian
1
2
exp
−
1
2
y
M
pd
Geometr
y
s
p
ace Filter s
p
ace
x
pd
^
^
x
pd
x
pd
v
D
x
x
pd
u
D
x
x
p
d
v
D
x
pd
u
D
x
Figure 4: Transformation from geometry space to filter
space by the matrix M
M
M
pd
. The ellipse inside the parallelo-
gram is the footprint of the photon differential. When trans-
formed into filter space the ellipse becomes a unit circle.
form the photon hit point. This can be achieved us-
ing a simple univariate kernel as those presented in
Table 2. To the kernel, we input a distance along the
time dependent differential vector, D
t
x
x
x
pd
, relative to
furthest point of the kernel along negative D
t
x
x
x
pd
. This
is illustrated in Figure 3. With time filtering the tem-
poral radiance estimate is formulated as
b
L
r
(x
x
x,ω
ω
ω) =
n
∑
pd=1
f
r
(x
x
x,ω
ω
ω
pd
,ω
ω
ω)E
pd
(x
x
x,ω
ω
ω
pd
)
K
s
(x
x
x −x
x
x
0
pd
)
T
M
M
M
T
pd
M
M
M
pd
(x
x
x −x
x
x
0
pd
)
K
t
(x
x
x
t
−x
x
x
0
pd
)
T
(x
x
x
t
−x
x
x
0
pd
)
h
2
t
!
, (9)
where K
s
is a bivariate kernel function (See Table 1),
K
t
is a univariate kernel function, h
t
is the length of
the temporal kernel along D
t
x
x
x
pd
, and x
x
x
t
is the furthest
point of the kernel in the direction −D
t
x
x
x
pd
.
With the formulation of the temporal radiance es-
timate, we now have a method, which reconstructs in-
direct illumination based on a virtual scenes dynam-
ics. This allows for motion blur. In the following we
will make a simple analysis of the method.
3 RESULTS
We first test our proposed method using a case study.
The case study is a simple animated scene, in which
a sinusoidal wave moves horizontally in a direction
perpendicular to the wave crests. The wave is illumi-
nated from above by collimated light, which it refracts
TEMPORAL PHOTON DIFFERENTIALS
57
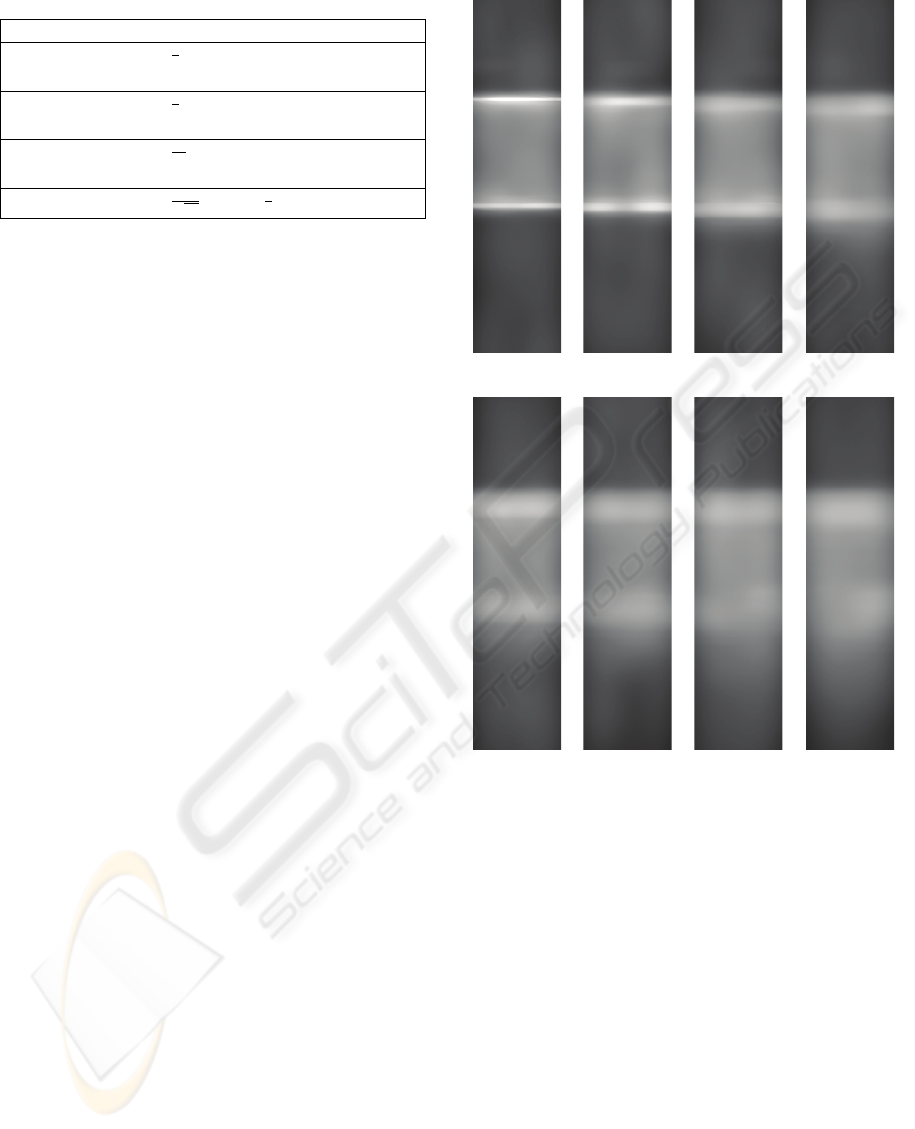
Table 2: Univariate kernel functions.
Kernel K
t
(y)
Uniform
1
2
if y < 1,
0 otherwise
Epanechnikov
3
4
(1 −y) if y < 1,
0 otherwise
Biweight
15
16
(1 −y)
2
if y < 1,
0 otherwise
Gaussian
1
√
2π
exp
−
1
2
y
such that the light form caustics on a plane beneath
the wave. A virtual camera is placed such that the
caustics are clearly visible.
We have rendered the scene using temporal pho-
ton differentials, and Cammarano and Jensen’s time
dependent photon mapping. The images in Figure 5
are renderings of the same frame but at different expo-
sures, e. They were rendered using temporal photon
differentials and a photon map containing only 1000
photons. From the images we notice that the tempo-
ral photon differentials assume the expected behavior.
As the exposure increases the caustics are blurred ac-
quiring a comets tail away from the direction of move-
ment. This is the behavior chosen at implementation
time. We could just as well have placed the time de-
pendent kernel centered over the photon intersection
point and likewise have centered the time filtering or
we could just have centered the filtering. As it is, the
time differential is ’trailing’ after the photon both in
respect to placement and filtering. As we shall see,
though it is hardly visible, the same strategy has been
implemented for time dependent photon mapping.
The renderings in Figure 6 have all except (a) been
created with time dependent photon mapping. Addi-
tionally, all images were rendered using the same ex-
posure, e = 1.0 frame. Figure 6(a) has been included
for comparison, it was rendered using temporal pho-
ton differentials and is a copy of the image in Figure 5
with an exposure 1.0 frame. First of all, what we see
from Figure 6(b) is that the bias versus variance trade-
off provided by time dependent photon mapping is
too poor to produce palpable caustics. For this rea-
son a much higher number photons have been used
to render the images in the three rightmost columns.
Of these, the top row is based on a photon map con-
taining as much as 480 000 photons while the bot-
tom row is based on a photon map contain 40 000
photons. From left to right the temporal resolution
increases from 0 to 2 to 10 in-between frames. The
spatial bandwidth for the renderings was chosen as
to decrease noise to an acceptable level. This leads
to the perhaps most important observation, namely
that a low temporal resolution produces visible bands
that can only be removed by filtering beyond what re-
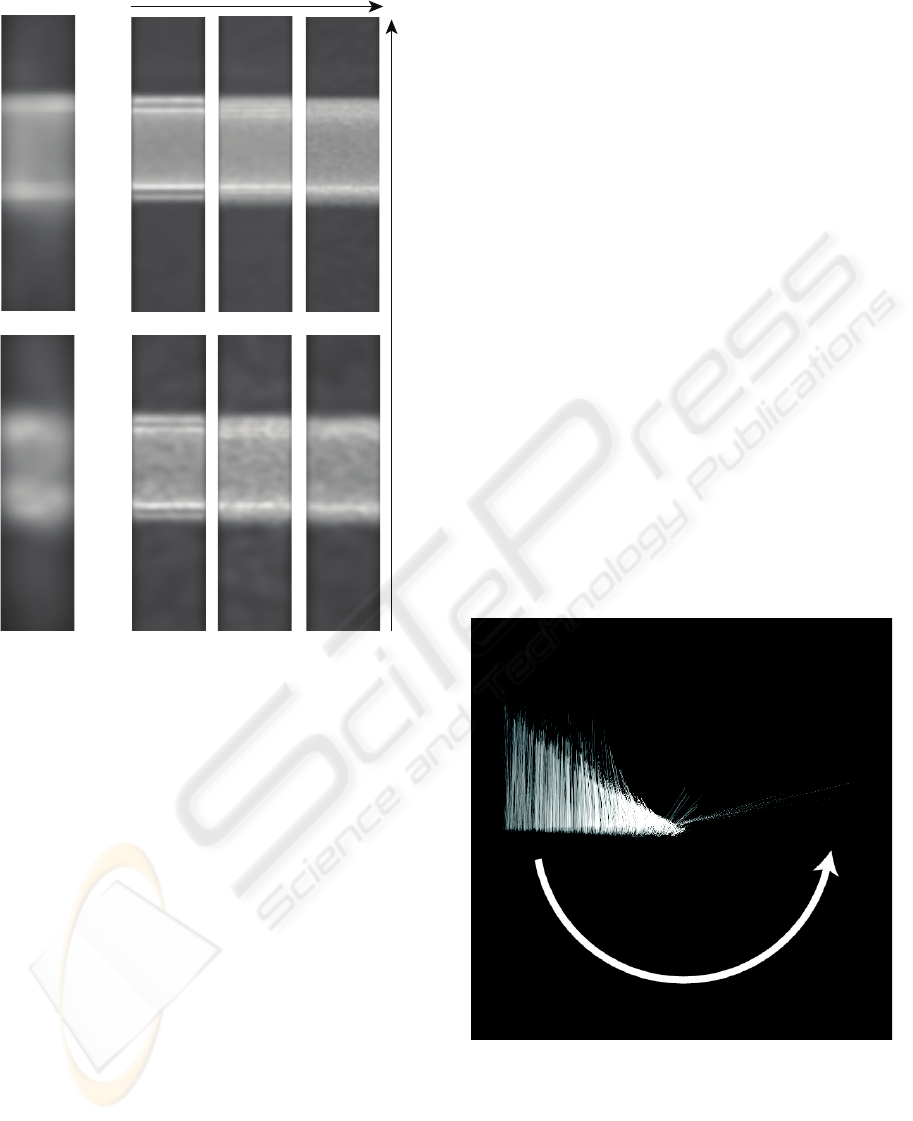
1/12 1/4 1/2 3/4
1 5/4 3/2 7/4
Figure 5: Renderings of the case study scene using tempo-
ral photon differentials. The number under the renderings
indicate exposure, e. All images are rendered at the same
frame step using a photon map containing 1 000 photons.
moves normal noise. This complicates matter, as an
increase of photons no longer is a guarantee for high
quality illumination.
Photon differentials are free of this concern as the
blurring is based on the first order derivatives of object
movement and not on finite animation steps. In the
implementation presented here one additional frame
is need in order to estimate the derivatives.
The images in Figure 7 present a more complex–
all though very artificial–scene, in which a cylinder
is rotating counterclockwise around its one end. This
rotation means that the speed of the cylinder will in-
crease as we move from the turning point down the
length of the cylinder. As a result the produced caustic
becomes more blurred when refracted from the high-
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
58
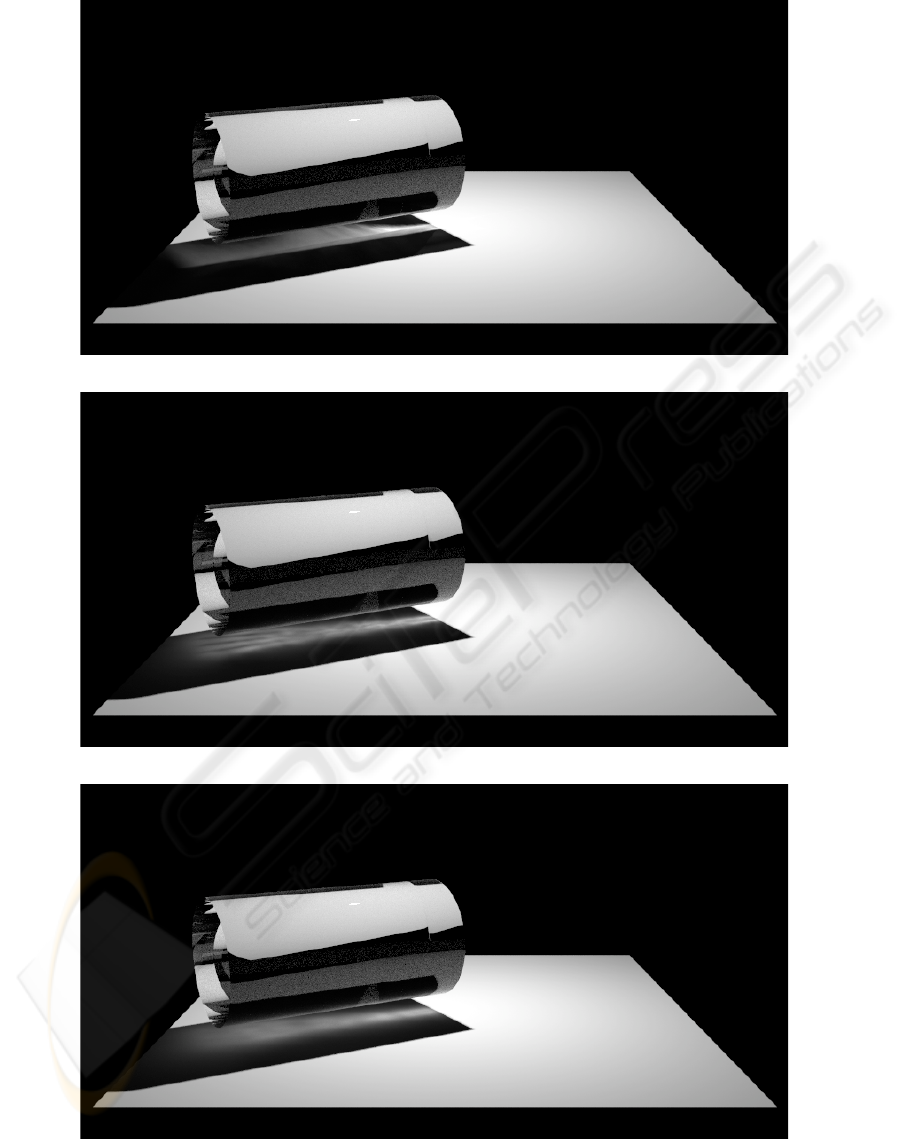
(a)
(b)
(c)
Figure 7: Rendering of a rotating cylinder. All images were render with a exposure of 1.0 frames, using a photon map
containing 5000 photons. Figure 7(a) was rendered using temporal photon differentials. Figures 7(b) and 7(c) were rendered
using time dependent photon mapping the former using 100 photons per radiance estimate and the latter using 250 photons in
the radiance estimate.
TEMPORAL PHOTON DIFFERENTIALS
59
(c) (d) (e)
resolution of photon map
temporal resolution
(f) (g) (h)
(a)
(b)
Figure 6: Comparing temporal photon differentials with
time dependent photon differentials. Rendering in (a)
shows temporal photon differentials using 1 000 photons,
(b) shows time dependent photon differentials using 1 000
photons, (c)-(e) shows time dependent photon differentials
using 480 000 photons with 0, 2, and 10 in-between frames
respectively, and (f)-(g) shows time dependent photon dif-
ferentials using 40 000 photons with 0, 2, and 10 in-between
frames respectively. The exposure for all images is 1.0
frame.
speed end of the cylinder. Figure 7(a) gives the solu-
tion provided by temporal photon differentials while
the images in Figures 7(b) and 7(c) were produced
with time dependent photon mapping. All images
were rendered with the same number of photons con-
tained in the photon map. However, the two latter im-
ages were rendered with different bandwidths. From
these two images we see that at this obviously low
temporal resolution an increase in bandwidth can help
remove the temporal bands that time dependent pho-
ton mapping is prone to. The price, however, is an
unwanted blurring of the front of the caustic.
Finally, Figure 8 solely depicts the photons’ time
differentials as they are projected down on the plane
beneath the cylinder.
A high exposure time has been used as to facilitate
the illustration. The image confirms that the time dif-
ferential vectors become longer when refracted from
the high-speed end of the cylinder, thus elongating the
time dependent kernel used in the temporal radiance
estimate.
4 CONCLUSIONS
In this paper we have presented temporal photon dif-
ferentials – a global illumination method for render-
ing animated scenes. Temporal photon differentials
elegantly handles time filtering such that frames can
be rendered on a one to one basis. Since velocity
is a relative concept, out method handles camera as
well as object motion, further in contrast to simi-
lar dynamic scene renderer, temporal photon differ-
entials does not need in-between frames in order to
avoid temporal aliasing. Finally, temporal photon dif-
ferentials includes photon differential’s ability to ef-
ficiently and sharply model caustics in still frames,
and it further improves the computationally efficiency
for animations by reusing photons from earlier frames
through the first order spatial-temporal model of pho-
ton incidence.
Figure 8: Projected time differentials from a rotating glass
cylinder.
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
60

REFERENCES
Cammarano, M. and Jensen, H. W. (2002). Time depen-
dent photon mapping. In EGRW ’02: Proceedings of
the 13th Eurographics workshop on Rendering, pages
135–144, Aire-la-Ville, Switzerland, Switzerland. Eu-
rographics Association.
Christensen, P. H., Laur, D. M., Fong, J., Wooten, W. L.,
and Batali, D. (2003). Ray differentials and multires-
olution geometry caching for distribution ray tracing
in complex scenes. In Proceedings of Eurograph-
ics 2003, Computer Graphics Forum, pages 543–552.
Blackwell Publishing Inc.
Cook, R. L., Porter, T., and Carpenter, L. (1984). Dis-
tributed ray tracing. SIGGRAPH Comput. Graphics,
18(3):137–145.
Durand, F., Holzschuch, N., Soler, C., Chan, E., and Sillion,
F. X. (2005). A frequency analysis of light transport.
In Marks, J., editor, ACM SIGGRAPH 2005, pages
1115–1126.
Egan, K., Tseng, Y.-T., Holzschuch, N., Durand, F.,
and Ramamoorthi, R. (2009). Frequency Analysis
and Sheared Reconstruction for Rendering Motion
Blur. SIGGRAPH (ACM Transactions on Graphics),
28(3):93:1–93:13.
Gjøl, M., Larsen, B. D., and Christensen, N.-J. (2008). Final
gathering using ray differentials. In Proceedings of
WSCG 2008, pages 41–46.
Haeberli, P. and Akeley, K. (1990). The accumulation
buffer: hardware support for high-quality rendering.
In SIGGRAPH ’90: Proceedings of the 17th an-
nual conference on Computer graphics and interac-
tive techniques, pages 309–318, New York, NY, USA.
ACM.
Igehy, H. (1999). Tracing ray differential. In Rockwood, A.,
editor, Siggraph 1999, Computer Graphics Proceed-
ings, pages 179–186, Los Angeles. Addison Wesley
Longman.
Myszkowski, K., Tawara, T., Akamine, H., and Seidel, H.-
P. (2001). Perception-guided global illumination solu-
tion for animation rendering. In SIGGRAPH ’01: Pro-
ceedings of the 28th annual conference on Computer
graphics and interactive techniques, pages 221–230,
New York, NY, USA. ACM.
Schjøth, L., Frisvad, J. R., Erleben, K., and Sporring, J.
(2007). Photon differentials. In GRAPHITE ’07: Pro-
ceedings of the 5th international conference on Com-
puter graphics and interactive techniques in Australia
and Southeast Asia, pages 179–186, New York, NY,
USA. ACM.
Sporring, J., Schjøth, L., and Erleben, K. (2009). Spa-
tial and Temporal Ray Differentials. Technical Re-
port 09/04, Institute of Computer Science, University
of Copenhagen, Copenhagen, Denmark. ISSN: 0107-
8283.
Tawara, T., Myszkowski, K., Dmitriev, K., Havran, V.,
Damez, C., and Seidel, H.-P. (2004). Exploiting tem-
poral coherence in global illumination. In SCCG ’04:
Proceedings of the 20th spring conference on Com-
puter graphics, pages 23–33, New York, NY, USA.
ACM.
TEMPORAL PHOTON DIFFERENTIALS
61
