
BUILDING AND ROAD EXTRACTION ON URBAN VHR
IMAGES USING SVM COMBINATIONS AND MEAN
SHIFT SEGMENTATION
Christophe Simler and Charles Beumier
Signal & Image Centre, Royal Military Academy, 30 Av. de la Renaissance, 1000 Brussels, Belgium
Keywords: Support vector machine, Mean shift, Classifier combination, Very high spatial resolution image.
Abstract: A method is proposed for building and road detection on very high spatial resolution multispectral aerial
image of dense urban areas. First, objects are extracted with a segmentation algorithm in order to use both
spectral and spatial information. Second, a spectral-spatial object-level pattern is formed, and then
classification is performed using a 3-class SVM classifier, followed by a post-processing using contextual
information to handle conflicts. However, in the particular case where many building roofs are grey like the
roads and have similar geometry, classification accuracy is inevitably limited. In order to overcome this
limitation, different classifiers are combined and different patterns used, improving the accuracy of 10%.
1 INTRODUCTION
The accurate classification of remote sensing images
is an important task for applications such as
development planning, emergency response or earth
survey. Many investigations are currently done in
order to provide both efficient and (semi-)automated
classification algorithms. Our study deals with
building and road extraction on very high spatial
resolution (VHR) aerial images of dense urban
areas. The sensor is multispectral and covers a range
of three optic spectral channels (RGB), having a
spatial resolution of 0.5m per pixel.
Most of the remote sensing classification
applications work at the pixel level, and use only
spectral information. The first step consists generally
in extracting pixel spectral features, then patterns are
classified usually with the classical Gaussian
maximum likelihood (ML) supervised classifier
(Bishop, 2006). However, when only spectral
information is used classified data often manifest a
salt-and-pepper appearance (Lilesand and Kieffer,
1994). In addition, VHR images of urban areas
contain a significant amount of spatial information,
which should be used to make possible the precise
identification of small structures such as houses or
narrow roads.
Approaches involving Markov random fields
(MRF) use the contextual information (Jackson,
2002).
A faster and more recent technique intensively
used in hyperspectral imaging consists in building
morphological profiles (MPs) from the original data
to obtain (local) spatial information about size and
shape (Palmason et al., 2005), (Fauvel, 2008), (Tuia,
2009). Once geometrical features are extracted (the
MPs for example) they can be concatenated with the
spectral pattern to form a composite pattern, which
is then classified (Fauvel, 2008). Another solution is
to classify separately the spectral and spatial patterns
with two (or more) different classifiers and to
perform a decision fusion for the final class
attribution. The decision fusion processing and
interpretation can be performed using fuzzy (Fauvel
et al., 2006) or probabilistic (Benediktsson, 1999),
(Benediktsson et al., 2007) framework. The
difficulty with these approaches is to find adequate
source weights reflecting source reliabilities. Fusion
can also be performed on the final decision of each
classifier. In this case, conflicts between classes are
handled by another classifier (Benediktsson, 1999),
randomly or with additional information. Overviews
of multiple classifier system (MCS) are presented in
(Bishop, 2006), (Benediktsson et al., 2007). When
geometrical features are considered (the MPs for
example), the class distributions can generally not be
assumed to be Gaussian and nonparametric
supervised classifiers such as decision trees, K-
neirest-neighbors, neural networks (Fauvel et al.,
2006) (Benediktsson, 1999) or Support Vector
Machines (SVMs) (Fauvel, 2008) (Tuia, 2009) are
451
Simler C. and Beumier C. (2010).
BUILDING AND ROAD EXTRACTION ON URBAN VHR IMAGES USING SVM COMBINATIONS AND MEAN SHIFT SEGMENTATION.
In Proceedings of the International Conference on Computer Vision Theory and Applications, pages 451-457
DOI: 10.5220/0002851104510457
Copyright
c
SciTePress

generally used. These different classifiers are
presented in (Bishop, 2006). In the context of
multispectral images, SVMs are generally more
effective in terms of classification accuracy than
most of the other methods (Melgani, 2004), (Foody,
2004). Also, the “geometric” nature of the SVMs
enables them to handle small ratio between the
number of available training samples and the
number of features. Thus, even in the hyperspectral
context they generally do not need a feature
reduction pre-processing step (Melgani, 2004).
However, SVMs have the drawback to be originally
developed to solve binary classification problems,
and multi-class SVMs are generally handled by the
“one-against-all” or the “one-against-one” strategy
(Bishop, 2006), (Melgani, 2004).
Another approach to exploit spatial information
is suggested in (Tarabalka et al., 2009). First, a
classical pixel wise spectral classification is
performed, and a segmentation algorithm is applied
independently. Then, spatial information is included
by merging the segmentation and the classification
maps by assigning to a segmented area the
predominant pixel class within it.
In this paper another strategy is suggested,
exploiting the fact that in VHR images our two
classes of interest (road and building) are objects
with specific geometry. The idea consists in building
object (global) geometric features. First, extraction
of interest objects is performed with a segmentation
algorithm applied to the image. Second, a composite
object pattern is formed with geometrical and
spectral features, then this pattern is classified into
class “road”, building” or “other”. The method
provides good classification accuracy with most
rural, peri-urban and urban areas. However, in this
paper we focus on the difficult case of dense urban
areas containing many building roofs of similar
spectral signature (and geometry) than the roads.
Whatever the classifier used, this leads to a
systematic problem of false alarms for the class
“road” and of bad detections for the class “building”
(many buildings are classified as roads). In this case
the building heights would have been useful to
discriminate the classes, but with a single image we
have no access to this information. In order to
compensate this lack of information about the
features, we suggest combining several classifiers in
a way to exploit simultaneously the ability of all of
them to recognize buildings. The paper is organized
as follows. The classification technique with a single
classifier is presented in part 2. Part 3 deals with the
suggested classifier combinations. Finally, part 4 is
the conclusion.
2 CLASSIFICATION
TECHNIQUE
2.1 Data Specifications
Figure 1 shows a part of multispectral VHR aerial
image of dense urban area (2833x2618 pixels). In
can be seen that with this example the spectral
characteristics of many buildings are similar to the
one of the roads. Also, many roads are very narrow,
often because partially occluded by houses.
Figure 1: Part of a color aerial image (Brussels center,
Belgium) with a spatial resolution of 0.5m.
2.2 Object Extraction with
Segmentation
The aim of this part is to extract coherent regions
corresponding to actual image objects such as roads,
buildings or others. The literature provides many
segmentation algorithms divided into three
categories: edge-based, region-based and clustering.
Some of them are Graph-Cut, region growing,
watersheds (Debeir et al., 09), K-means (Bishop,
2006), EM (Bishop, 2006) and mean shift
(Comaniciu and Meer, 02). The mean shift algorithm
was chosen for the following reasons:
- it was designed for vector processing and thus is
adapted to process multispectral images,
- the integration of the spatial coherence property
is straightforward,
- it is robust with respect to spectral noise because
based on a smoothing process,
- no assumption has to be done about the feature
space (number of clusters, underlying distri-
bution).
- There is only one parameter to tune: the
segmentation resolution.
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
452

The limitation is that if the dimension is high it
can suffer from the curse of dimensionality. In our
application, a 5-dimensional spectral-spatial feature
space is built. In this space, a pixel corresponds to a
vector whose components are its three spectral
values, and its two spatial coordinates. The mean
shift operates on this space by estimating in an
iterative way the local maxima of the underlying
nonparametric spectral distribution. At each
iteration, the components of each vector are replaced
by the means of the components of all the vectors
situated in a spectral-spatial neighborhood (we use a
flat kernel). The convergence toward the local
maxima is ensured (Comaniciu and Meer, 02). Then,
the pixels having converged toward the same
maximum are grouped together to form an object.
After observation of the image of figure 1, it has
been noticed that our actual objects of interest have
always an area upper than one hundred pixels. Thus,
an additional step merges (with the other objects) all
the mean shift objects smaller than this threshold.
The parameter of the mean shift is (in case of a flat
kernel) the radius of the spectral-spatial
neighborhood. Because this radius is different in
spectral than in spatial (the neighborhood is a hyper-
ellipsoid), there are in fact two regularization
parameters. However, results are not very sensitive
with respect to the spatial radius (Comaniciu and
Meer, 02), and it can be fixed to an a priori suitable
value. In our application it is fixed to seven pixels.
The spectral radius is manually tuned in order to find
a good compromise between under and over
segmentation. With the image of figure 1, a value of
20 is visually optimal. It can be seen in the figure 2
that roads and buildings are generally precisely
extracted. Also, there are very few under and over
segmentation. It is an advantage with respect to the
watershed algorithm, which generally suffer from
important over segmentation (Debeir et al., 2009).
Figure 2: Mean shift segmentation results on a zoom of the
image of figure 1.
2.3 Spectral-spatial Object Pattern
The aim of this part is to establish an object pattern
able to separate the “building”, “road” and “other”
classes. It exists many geometrical, spectral or
textural features to characterize an area. In our
application, the features were selected by observing
the mean shift areas in figures such as the figure 2.
An idea to discriminate our classes was to use the
specific polygonal geometries assumed for roads and
buildings. However, the boundaries of mean shift
areas are often too jagged to fit suitably polygonal
models. The area (size) and eccentricity (shape)
descriptors are retained because of their abilities to
discriminate roads. The eccentricity (the ratio of the
lengths of the two main inertia axis of the area) is
estimated by computing the ratio of the two
eigenvalues of the (spatial) pixel vector covariance
matrix. Textural features are not retained, because
the mean shift objects are generally low textured,
especially in urban area. Some man-made objects
have sometimes some kinds of texture, but it is
exception (chimneys on a roof) or perturbations
(cars on a road). In addition, the image is filtered
before feature computation in order to limit the noise
effect and other small perturbations or occlusions,
decreasing also the texture. The spectral features
retained are the means of the multispectral (RGB)
vector computed on the area. It discriminates the
classes “road” and “other”. The buildings are
generally grey or brown-red. Also a building is often
divided into two parts, the sun part and the shadow
part. Another color space is tested, the (L*, a*, b*),
because it corresponds better to human visual
perception. In summary, we suggest testing two
spectral-spatial mean shift object patterns: {area,
eccentricity, mean of the RGB vector}, and {area,
eccentricity, mean of the L*a*b* vector}. Each
component is normalized to work in Euclidean
space. The main limitation is that some buildings
have both similar geometry and color than roads. It
exists many automatic feature reduction techniques
intensively used in hyperspectral imagery before
applying the classification (Fauvel, 2008) (Tuia,
2009) (Melgani, 2004). They are not considered
here for the following reasons: feature selection has
been done above by observing mean shift areas, five
dimensions is a low dimensional problem and
redundancy is low with these features, feature
reduction is seldom justified with the SVM classifier
used in part 2.4 (Melgani, 2004).
BUILDING AND ROAD EXTRACTION ON URBAN VHR IMAGES USING SVM COMBINATIONS AND MEAN
SHIFT SEGMENTATION
453

2.4 Object Classification with SVM
Among the numerous existing supervised
nonparametric classification methods, the compact
kernel SVM classifier was chosen because of its
superiority in terms of classification accuracy in the
context of remote sensing images, and its ability to
handle the curse of dimensionality (Bishop, 2006),
(Fauvel, 2008), (Melgani, 2004), (Foody, 2004). The
SVM algorithm is a 2-class classifier. We consider
the general case of a training set of two overlapping
classes. First, a nonlinear kernel function is applied
on the input space in order to obtain a higher
dimensional feature space having a better class
separability. The Gaussian kernel provides often the
best results, and is used in this paper. Second, the
parameters of the hyperplan linear model are
estimated according to the maximal margin criterion
and by penalizing the classification errors. The SVM
algorithm with Gaussian kernel has two
regularization parameters: the misclassification
penalty term and the Gaussian width. In this paper,
these parameters are optimized using cross-
validation, by minimizing the false classification rate
over a 2D-grid of ten thousand couples of values for
the two tuned parameters. This is costly but ensures
to find the global minimum. In order to have a very
high precision, this procedure is repeated three times
in a coarse to fine scheme. Finally, the optimal
values are used to learn the classifier on the entire
training set. In our application we have three classes
(“road”, “building” and “other”), and the “one-
against-all” multiclass SVM strategy is used. It
consists in using three binary SVM classifiers
independently, one for each class. During the
learning of one class, the elements of the training set
of the considered class are opposed to the elements
of the two other classes. This technique can provide
unbalanced training sets. However, in our
application this phenomenon is limited because we
have only three classes, and the training set is
composed of four hundred buildings, four hundred
roads and two hundred others. This training set was
built by manually assigning to a class some mean
shift areas situated outside the classification part
(outside the image of figure 1). It can be noted that
such a training set is designed only to classify parts
of the considered aerial image, and not parts of other
images with different illuminations. In fact, in our
application for each aerial image a training set is
built on parts of it, and the other parts are classified.
With the “one-against-all” approach, the final
decision can be taken by applying the “winner-take-
all” to the binary classifier probabilities (Melgani,
2004). Another possibility is to consider the final
binary classifier decisions (binary word) (Bishop,
2006). In that case, for three classes there are eight
possibilities and the five conflict situations (multiple
assignments) are generally handled by choosing
randomly one of the classes. In our application, it is
possible to handle conflicts by using a priori
knowledge and contextual information. In dense
urban area, the classes “building” and “road” are
largely predominant and have priority in case of
conflicts with the class “other”. Also, it has been
noticed by visualizing the “building” and “road”
conflict areas that contextual information can be
advantageously used. For example, if buildings (or
roads) mainly surround a conflict area, most of the
time it is a building (or a road). It would be
interesting in further work to compare this approach
with the one using the binary classifier probabilities
(Melgani, 2004). Also, combining contextual
information with probabilities would certainly be
optimal.
2.5 Classification Accuracy
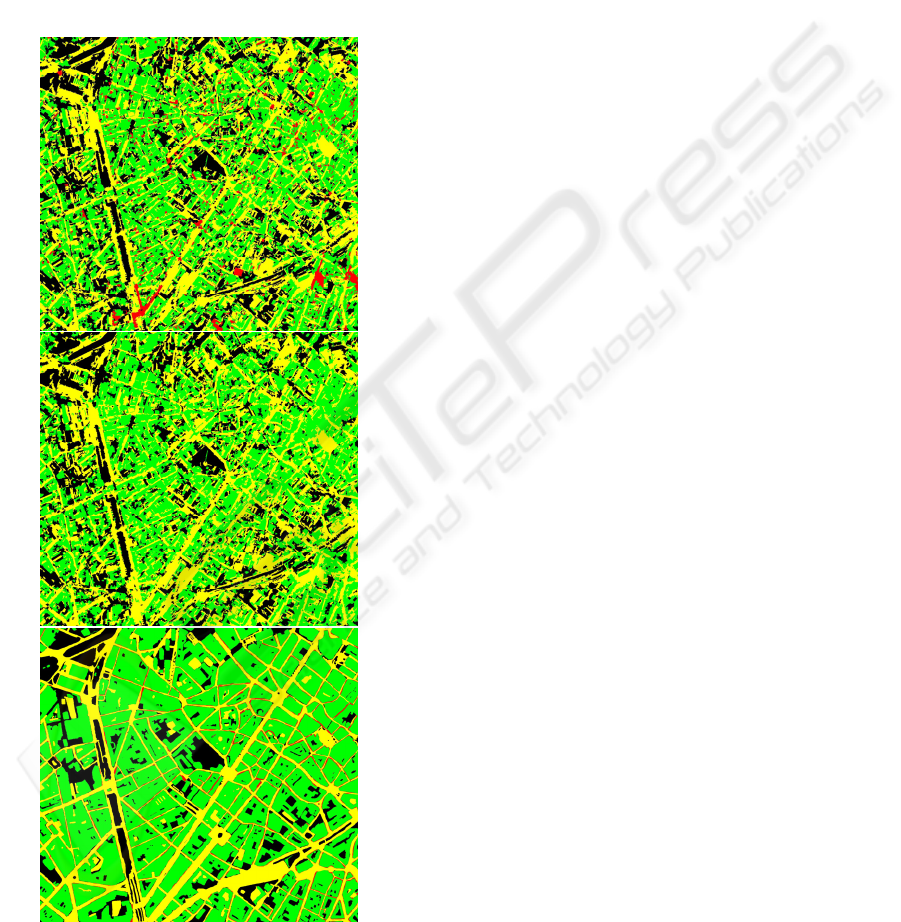
Figure 3 shows the SVM classification results for
the image of figure 1, with the pattern {area,
eccentricity, mean of the RGB vector}. On the top:
superimposition of the binary SVM results. Detected
roads, buildings, and others are respectively drawn
in yellow, green and black. The “building” and
“road” conflict areas are shows in red. It can be
noticed that there are few conflicts. On the middle:
3-class SVM results after handling the previous
conflicts with contextual information. Conflicts were
generally well handled. Bottom: ground truth built
by visual interpretation. The red on the ground truth
corresponds to areas where it was visually difficult
to discriminate roads and buildings, and road or
building detection on these areas are considered as
exact. Computing the 3x3 confusion matrix (in terms
of pixels) between the classified image (an example
is in the middle of figure 3) and the ground truth
assesses classification accuracy. Some descriptive
measures computed from the confusion matrix are in
table 1.
Table 1: Classification accuracy measures.
3-class SVM, pattern {a,e,R,G,B}
Overall accuracy 0.60
Producer’s accuracy road 0.66
Producer’s accuracy building 0.58
Producer’s accuracy other 0.59
User’s accuracy road 0.47
User’s accuracy building 0.86
User’s accuracy other 0.35
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
454
As expected with a dense urban area containing
similar spectral and spatial “road” and “building”
objects, results are poor. It can be seen in table 1 that
the false alarm rate is high for both the classes
“road” and “other”, in the detriment of the class
“building” having a high bad detection rate. In fact,
many grey building roofs are classified roads. This is
because the class “road” contains only grey elements
(pure class) and the class “building” contains both
grey and brown-red elements. Some other classifiers
were tested and without surprise the same problem
Figure 3: Top: superimposition of the binary SVM results,
with the pattern {area, ecc., meanRGB}. Yellow: roads;
green: buildings; black: other; red: building and road
conflicts. Middle: 3-class SVM results. Bot.: ground truth.
occurs, with even worse results than the SVM
classifier. In order to overcome this problem, a finer
class definition could be used. For example the class
“building” can be divided into two sub-classes, one
for the grey buildings and the other for the brown-
red ones. Another idea consists in increasing the
number of features. However, it is not ensured at all
that much better classification accuracy will be
obtained. In this paper, another strategy is suggested.
It consists in combining the decisions of different
classifiers and is the topic of part 3.
3 CLASSIFIER COMBINAISONS
Our aim is to solve the false alarm problem for the
classes “road” and “other”, and the bad detection
problem for the class “building”. The solution
consists in covering some road and other areas by
building areas. However, if some roads are
automatically eliminated, some correct roads will
also be lost and it is not conceivable because they
are already too divided up and cut. On the contrary,
some other areas can be eliminated with fewer risks.
In a dense urban area they are not numerous, and in
addition the class “other” is by far the less
important. Several classifiers were tested and the
bad detection problem for the class “building” is
recurrent to all of them. However, by observing the
visual results it was noticed that they are
complementary in the sense that each of them
detects correctly a little part of grey buildings, which
are classified roads by the others. In fact, a union of
all the detected building will certainly leads to a
much lower bad detection rate, without significant
increase of the false alarms. We suggest adding the
building areas detected by another classifier to the
building areas of the SVM of part 2, while
preserving its road network. This second classifier is
a single class SVM (Tax and Duin, 2001). The
difference between a single class and a two class
SVM can be illustrated as follows: while the two
class SVM attempts to separate two classes with a
linear hyperplan, the single class SVM attempts to
encircle the target class with a hypersphere to isolate
it from the rest. Also, only target samples are needed
for the training. In this paper, it uses the same
training set and has the same parameters than the
classical 2-class SVM. Of course the cross-
validation scheme is slightly different and the cost
function minimized in the one suggested in (Tax and
Duin, 2001), with equal weighting. The results can
be seen in table 2.
BUILDING AND ROAD EXTRACTION ON URBAN VHR IMAGES USING SVM COMBINATIONS AND MEAN
SHIFT SEGMENTATION
455
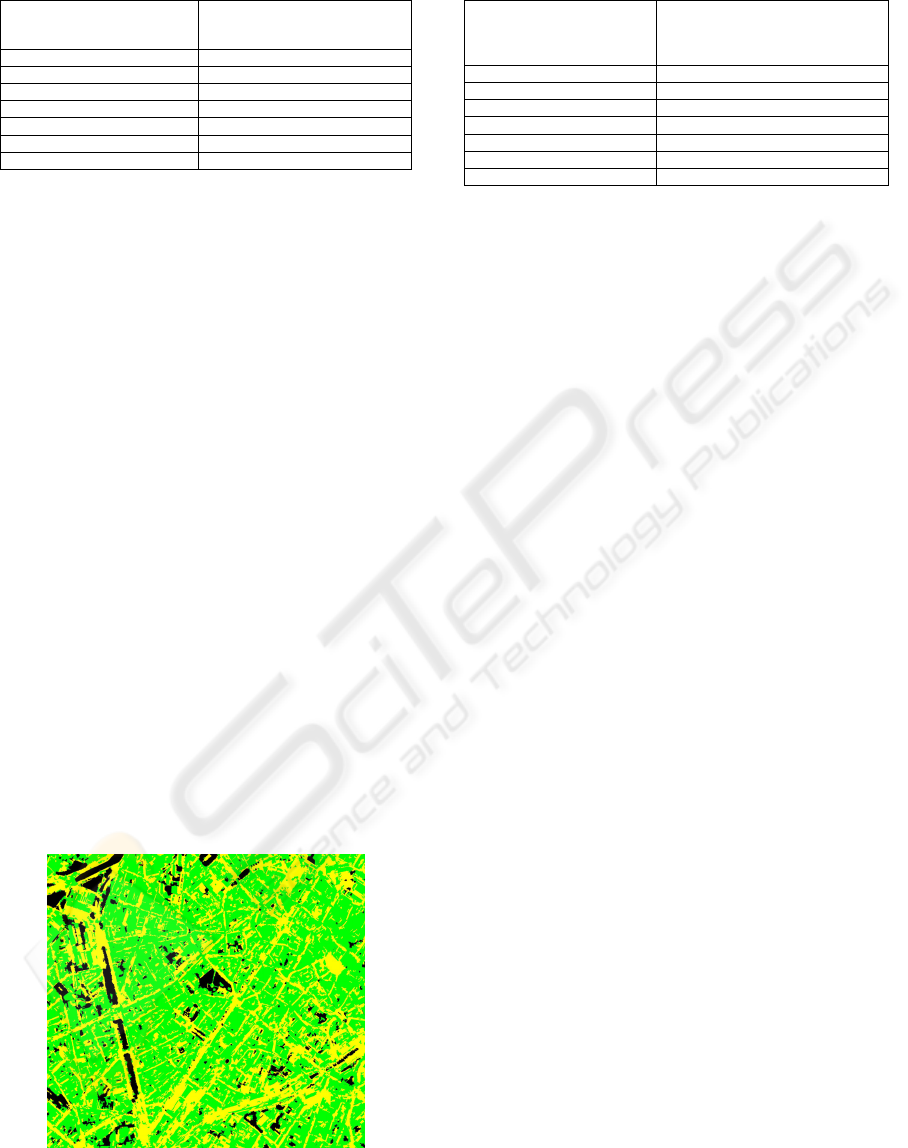
Table 2: Classification accuracy measures.
3-class SVM + buildings of the
single class SVM while roads
preserving, pattern {a,e,R,G,B}
Overall accuracy 0.66
Producer’s accuracy road 0.66
Producer’s accuracy building 0.69
Producer’s accuracy other 0.48
User’s accuracy road 0.47
User’s accuracy building 0.81
User’s accuracy other 0.53
Table 2 shows that such a combination of two
classifiers improves of 6% the overall accuracy. As
expected, the building bad detection rate is much
lower, with just a small increase of the building false
alarm rate. In summary, performances are better
concerning the buildings, but not excellent. Also, the
problems with the roads remain. Up to now, only
one of our two patterns has been considered, but the
same experiments were done with the pattern using
the (L*, a*, b*) color space. There is one significant
improvement with respect to the color space (R, G,
B): the producer’s accuracy road increases of 11%,
without adding many more false alarms. An idea to
decrease both the road false alarm rate and the
building bad detection rate is to combine this last
classifier combination with the buildings of the
previous classifier combination. In this last fusion,
all the buildings are added while no road
preservation is done. The risk is thus to loose some
correct roads. However, despite this drawback, the
classification accuracy is significantly better than all
the results obtained previously, as shown in table 3.
This four-classifier fusion improves the overall
accuracy of 9% with respect to the SVM classifier
used individually. The road false alarm rate is lower
but remains high. Encouraging results concern
mainly the “building” class with a much lower bad
detection rate. Visual results are shown on figure 4.
Figure 4: Classification results of the four-classifier
combination of table 3 (ground truth on figure 3).
Table 3: Classification accuracy measures.
(3-class SVM + buildings of the single
class SVM while roads preserving,
pattern {a,e,L*,a*,b*} ) + buildings of
the combination of table 2
Overall accuracy 0.69
Producer’s accuracy road 0.67
Producer’s accuracy building 0.76
Producer’s accuracy other 0.42
User’s accuracy road 0.49
User’s accuracy building 0.80
User’s accuracy other 0.75
4 CONCLUSIONS
Building and road detection on VHR images of
dense urban areas has been investigated. The
suggested approach contains segmentation and
classification algorithms especially well adapted to
multispectral data, and both spatial and spectral
information are used at the object level. Also,
contextual information around objects is used to
solve the SVM conflicts between roads and
buildings. In order to overcome the high road false
alarm rate and the high building bad detection rate in
the presence of similar road and building objects,
some classifier combinations were suggested and
different features used. Significant improvements
are achieved in terms of accuracy. Our current
research aims at filling road gaps and smoothing
road borders, on the basis of straight segment
detection.
ACKNOWLEDGEMENTS
We thank the financer IRSIB and the data provider
IGN (Be).
REFERENCES
Bishop, C., 2006. Pattern recognition and machine
learning, Springer.
Lilesand, T., Kieffer, R., 1994. Remote sensing and image
interpretation, Third edition, John Wiley & Sons, Inc.
Jackson, Q., 2002. Adaptative Bayesian contextual
classification based on Markov random fields, IEEE
TGRS, Vol. 40, No. 11, pp. 2454-2463.
Palmason, J. and all, 2005. Classification of hyperspectral
data from urban areas using morphological
preprocessing and independent component analysis.
Proc. IGARSS, vol. 1, pp. 176-179.
Fauvel, M., 2008. Spectral and spatial classification of
hyperspectral data using SVMs and morphological
profile. IEEE TGRS, Vol. 46, No. 11, pp. 3804-3814.
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
456

Tuia, D., 2009. Classification of very high spatial
resolution imagery using mathematical morphologie
and support vector machine. IEEE TGRS, Vol. 47, No.
11, pp. 3866-3879.
Fauvel, M and all, 2006. Decision fusion for the
classification of urban remote sensing images. IEEE
TGRS, Vol. 44, No. 10, pp. 2828-2838.
Benediktsson, J., 1999. Classification of multisourse and
hyperspectral data based on decision fusion. IEEE
TGRS, Vol. 37, pp. 1367-1377.
Benediktsson and all, 2007. Multiple classifier systems in
remote sensing: from basics to recent developments.
MCS, 7
th
International Workshop, Praque, Tchèque.
Melgani, F., 2004. Classification of hyperspectral remote
sensing images with support vector machines. IEEE
TGRS, Vol. 42, No. 8, pp. 1778-1790.
Foody, G., 2004. A relative evaluation of multiclass image
classification by support vector machines. IEEE
TGRS, Vol. 42, No. 6, pp. 1335-1343.
Tarabalka, Y., and all, 2009. Spectral-spatial classification
of hyperspectral Imagery based on partitional
clustering techniques. IEEE TGRS, Vol. 47, No. 8, pp.
2973-2987.
Debeir, O., Atoui H., Simler 2009. Weakened Watershed
Assembly for Remote Sensing Image Segmentation
and Change Detection. VISAPP, Portugal.
Comaniciu, D., Meer, P., 2002. Mean Shift: A Robust
Approach Toward Feature Space Analysis. IEEE
PAMI, Vol. 24, No. 5.
Tax, D., Duin, R., 2001. Uniform object generation for
optimizing one-class classifiers. JMLR 2, pp. 155-173.
BUILDING AND ROAD EXTRACTION ON URBAN VHR IMAGES USING SVM COMBINATIONS AND MEAN
SHIFT SEGMENTATION
457
