
COORDINATING EVOLUTION
Designing a Self-adapting Distributed Genetic Algorithm
Nikolaos Chatzinikolaou
School of Informatics, University of Edinburgh, Informatics Forum, Crichton Street, Edinburgh, Scotland, U.K.
Keywords:
Genetic algorithms, Distributed computation, Multi-agent learning, Agent coordination.
Abstract:
In large scale optimisation problems, the aim is to find near-optimal solutions in very large combinatorial
spaces. This learning/optimisation process can be aided by parallelisation, but it normally is difficult for
engineers to decide in advance how to split the task into appropriate segments attuned to the agents working
on them. This paper chooses a particular style of algorithm (a form of genetic algorithm) and describes a
framework in which the parallelisation and tuning of the multi-agent system is performed automatically using
a combination of self-adaptation of the agents plus sharing of negotiation protocols between agents. These GA
agents are optimised themselves through the use of an evolutionary process of selection and recombination.
Agents are selected according to the fitness of their respective populations, and during the recombination phase
they exchange individuals from their population as well as their optimisation parameters, which is what lends
the system its self-adaptive properties. This allows the execution of optimal optimisations without the burden
of tuning the evolutionary process by hand. The architecture we use has been shown to be capable of operating
in peer to peer environments, raising confidence in its scalability through the autonomy of its components.
1 INTRODUCTION
1.1 Genetic Algorithms
Since their inception by John Holland in the early 70’s
(Holland, 1975) and their popularisation over the last
few decades by works such as (Goldberg, 1989), Ge-
netic Algorithms (GAs) have been used extensively to
solve computationally hard problems, such as com-
binatorial optimisations involving multiple variables
and complex search landscapes.
In its simplest form, a GA is a stochastic search
method that operates on a population of potential so-
lutions to a problem, applying the Darwinian princi-
ple of survival of the fittest in order to generate in-
creasingly better solutions. Each generation of candi-
date solutions is succeeded by a better one, through
the process of selecting individual solutions from the
current generation according to their relative fitness,
and applying the genetic operations of crossover and
mutation on them. The result of this process is that
later generations consist of solution approximations
that are better than their predecessors, just as is natu-
ral evolution.
GAs have proved to be flexible and powerful tools,
and have been successfully applied to solve problems
in domains too numerous and diverse to list here (ex-
amples are provided in surveys such as (Ross and
Corne, 1995)). Despite their widespread success,
however, there’s still a number of issues that make
their deployment by the uninitiated a non-trivial task.
Two themes that keep recurring in the literature are
parameter control, which involves determining the
optimal set of parameters for a GA; and parallelisa-
tion, which involves distributing the computational
load of a GA between multiple computational units.
It is on these two themes that this research concen-
trates.
1.2 Scope of this Paper
The principal objective of this research is the design
and implementation of a scalable architecture that will
enable large numbers of agents (in the form of com-
puters participating in an open network) to cooperate
in order to solve complex problems that would require
a prohibitively long time to solve in a standard, non-
parallel GA.
The architecture we propose aims to address both
of the issues of parameter control and parallelisation
at the same time, by using a novel approach: that of
implementing an open, peer-to-peer network of inter-
13
Chatzinikolaou N. (2010).
COORDINATING EVOLUTION - Designing a Self-adapting Distributed Genetic Algorithm.
In Proceedings of the 12th International Conference on Enterprise Information Systems - Artificial Intelligence and Decision Support Systems, pages
13-20
DOI: 10.5220/0002871200130020
Copyright
c
SciTePress

connected GAs, in which no a priori assumptions will
need to be made regarding their configuration. In-
stead, the capacity of each GA for solving the prob-
lem at hand will be evolved itself during runtime. In
addition, the self-organising nature of the system will
ensure that all and any available resources (participat-
ing computers) will be efficiently exploited for bene-
fiting the system.
The general concept underlying this research in-
volves exploiting self-organisation and coordination
among agents through the use of mobile protocols de-
scribed using a process calculus, and in particular the
Lightweight Coordination Calculus (LCC) as speci-
fied in (Robertson, 2004a; Robertson, 2004b).
2 RELATED WORK
2.1 Self Adaptation in GAs
In every application of a GA, the designer is faced
with a significant problem: tuning a GA involves con-
figuring a variety of parameters, including things such
as population sizes, the operators used for selection
and mutation, type and size of elitism etc. As a gen-
eral case, before a GA can be deployed successfully
in any problem domain, a significant amount of time
and/or expertise has to be devoted to tuning it.
As a result, numerous methods on parameter op-
timisation have appeared over the years (Eiben et al.,
2000). These generally fall in one of two categories:
• Parameter Tuning, in which the set of GA param-
eters are determined a priori, and then applied to
the GA before it is executed.
• Parameter Control, in which the parameters
change (adapt) while the GA is running.
It was discovered early on (Hesser and M¨anner,
1991; Tuson, 1995) that simple a priori parameter
tuning is generally insufficient to produce adequate
results, as different stages in the evolutionary pro-
cess are likely to require different parameter values.
Therefore, in our research we concentrate on dynamic
parameter adaptation, along the lines of work pre-
sented in (Back, 1992; Eiben et al., 2000; Meyer-
Nieberg and Beyer, 2006).
2.2 Parallel GAs
Even after a set of optimal parameters has been estab-
lished, traditional (canonical) GAs suffer from further
difficulties as problems increase in scale and com-
plexity. (Nowostawski and Poli, 1999) has identified
the following:
• Problems with big populations and/or many di-
mensions may require more memory than is avail-
able in a single, conventional machine.
• The computational (CPU) power required by the
GA, particularly for the evaluation of complex fit-
ness functions, may be too high.
• As the number of dimensions in a problem in-
creases and its fitness landscape becomes more
complex, the likelihood of the GA convergingpre-
maturely to a local optimum instead of a global
one increases.
To some extend, these limitations can be alleviated
by converting GAs from serial processes into parallel
ones. This involves distributing the computational ef-
fort of the optimisation between multiple CPUs, such
as those in a computer cluster.
(Lim et al., 2007) identify three broad categories
of parallel genetic algorithm (PGA):
• Master-slave PGA.
This scheme is similar to a standard, or canonical,
genetic algorithm, in that there is a single popula-
tion. The parallelisation of the process lies in the
evaluation of the individuals, which is allocated
by the master node to a number of slave process-
ing elements. The main advantage of master-slave
PGAs is ease of implementation.
• Fine-grained or Cellular PGA.
Here we have again a single population, spa-
tially distributed among a number of computa-
tional nodes. Each such node represents a sin-
gle individual (or a small number of them), and
the genetic operations of selection and crossover
is restricted to small, usually adjacent groups. The
main advantage of this scheme is that it is partic-
ularly suitable for execution on massively paral-
lel processing systems, such as a computer system
with multiple processing elements.
• Multi-population or Multi-deme or Island
PGA.
In an island PGA there are multiple popula-
tions, each residing on a separate processing node.
These populations remain relatively isolated, with
“migrations” taking place occasionally. The ad-
vantages of this model is that it allows for more
sophisticated techniques to be developed.
The approach of parallelisation of genetic algo-
rithms becomes even more appropriate in the light
of recent developments in the field of multi-processor
computer systems (Munawar et al., 2008), as well as
the emergence of distributed computing, and particu-
larly the new trend towards cloud computing (Foster
et al., 2008).
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
14

The work presented in this paper was originally
influenced by (Arenas et al., 2002), which follows the
island paradigm (Tanese, 1989; Belding, 1995). This
scheme, however, is just one of many. Among others,
(Cant-Paz, 1998; Nowostawski and Poli, 1999; Alba
and Troya, 1999) each provide an excellent coverage
of the work done on this theme.
2.3 Multi-agent Coordination
This architecture is based on the concept of co-
ordinating the interactions between individual GA
agents using shared, mobile protocols specified in the
Lightweight Coordination Calculus (LCC) (Robert-
son, 2004b; Robertson, 2004a). It is the coordina-
tion between the agents that is going to guide the GA
agents as a system, by providing an open and robust
medium for information exchange between them, as
well as the necessary evolutionary pressure.
Apart from being used to specify declaratively
the interactions between agents, LCC is also an ex-
ecutable language, and as such it will be used to dic-
tate the interactions that will “glue” the GA agents
together. LCC is designed to be a flexible, multi-
agent language, and has proved successful in the im-
plementation of open, peer-to-peer systems, as was
demonstrated by the the OpenKnowledge framework
(Robertson et al., 2006).
3 ARCHITECTURE
3.1 “Intra-agent” Genetic Algorithm
The system we have developed consists of a network
of an arbitrary number of identical agents. Each agent
contains an implementation of a canonical GA that
acts on a local population of genomes, performing
standard crossover and mutation operators on them.
We call this GA the “intra-agent GA”, and its steps
are that of a typical GA. For a population of size n:
1. Evaluate each member of the population.
2. Select n pairs of parents using roulette wheel se-
lection.
3. For each pair of parents, recombine them and mu-
tate the resulting offspring.
4. Repeat from step 1 for the newly created popula-
tion.
3.2 “Inter-agent” Genetic Algorithm
At the same time, every agent has (and executes lo-
cally) a copy of a shared, common LCC protocol that
dictates how this agent coordinates and shares infor-
mation with its peers. The result of this coordination
is a secondary evolutionary algorithm, which evolves
not the genomes in each agent but the agents them-
selves, and in particular the population and parame-
ters that each of them use for their respective “intra-
agent” GA. We call this secondary GA the “inter-
agent” GA:
1. Perform a number of “intra-agent” GA iterations.
This step is equivalent to step 1 of the “intra-
agent” GA, as it essentially establishes a mea-
sure of that agent’s overall fitness. This fitness is
based on the average fitness of all the individual
genomes in the agent’s population, as established
by the “intra-agent” GA.
2. Announce agent’s fitness to neighbouring peers,
wait for them to announce their own fitness, and
select a fit mate using roulette wheel selection.
Again, this is similar to step 2 above. The only
difference this time is that every agent gets to
select a mate and reproduce, as opposed to the
“intra-agent” GA where both (genome) parents
are selected using roulette wheel selection.
3. Perform crossoverbetween self and selected agent
(population AND parameters).
Here we have the recombination stage between
the two peers, during which they exchange
genomes from their respective populations (mi-
gration) as well as parameters. The new param-
eters are obtained by averaging those of the two
peers, and adding a random mutation amount to
them.
4. Repeat from step 1.
By combining the GA parameters of the agents
in addition to the genomes during the migra-
tion/recombination stage (step 3), we ensure that
these parameters evolve in tandem with the solu-
tion genomes, and thus remain more-or-less optimal
throughout the evolutionary process. It is this charac-
teristic that lends our system its self-adaptive proper-
ties. The idea behind this approach is that we use the
principle that forms the basis of evolutionary compu-
tation to optimise the optimiser itself.
3.3 Agent Autonomy and Motivation
As is the norm in most multi-agent systems, each
agent in our implementation is fully autonomous.
This autonomy is evident in the fact that the agents
are able to function even without any peers present, or
when peer-to-peer communication is compromised.
COORDINATING EVOLUTION - Designing a Self-adapting Distributed Genetic Algorithm
15

This characteristic has the obvious advantage of im-
proved robustness.
However, an agent operating in isolation will not
be able to evolve its own GA parameters, and hence
its performance will remain at a steady, arbitrary level
dictated by the current set of GA parameters it uses.
This is where the motivation of the agents to inter-
act with their peers stems from: by having agents col-
laborate/breed with their peers, the system as a whole
evolves, adapts, and improves its performance.
3.4 Comparison with Existing Systems
Our architecture shares some characteristics with
other approaches in the field. For example, in a typ-
ical “island” based parallel GA (Arenas et al., 2002)
there is usually migration of genomes, but no evolu-
tion of GA parameters. On the other hand, in typical
meta-GA implementations (Grefenstette, 1986; Clune
et al., 2005), there is adaptation of the genetic opera-
tors but no parallelisation of the evolutionary process.
Key to our approach is the fact that the optimisa-
tion of the GA agents does not happen before they are
used to solve the actual problem at hand, but instead
their optimisation happens as a continuous, dynamic
process during their operational lifetime. This is of
particular relevance, especially in enterprise environ-
ments where requirements between different applica-
tions fluctuate significantly.
4 PRELIMINARY EXPERIMENTS
4.1 Objectives
Following the implementation of our architecture,
we performed a number of experiments in order to
evaluate its performance compared to (a) traditional
(canonical) genetic algorithms, and (b) an island-
based parallel genetic algorithm with simple popula-
tion migration.
4.2 Test Case
As our optimisation test case, we used the Rastrigin
equation, which is widely adopted as a test function
in the field. Its general form is given in equation 1.
F( ¯x) = kA +
k
∑
i=1
(x
2
i
− Acos(2πx
i
))
(1)
This is a minimisation problem, which implies
that the aim of the GA is to make the fitness mea-
sure as small as possible, with the optimal value being
zero.
In all our experiments, the steepness A was set to
10, and the number of Rastrigin variables k was set to
30. The range of x was -0.5 to +0.5, encoded in 16-bit
Gray code. The choice of these parameters was in-
fluenced by similar experiments in the literature (e.g.
(Yoshihiro et al., 2003)).
4.3 Intra-agent GA Configuration
Since we are mainly interested in observing the adap-
tation that occurs in the individual agents’ GAs them-
selves during the evolutionary process, we tried to
keep things simple and controllable by only allowing
a single parameter to adapt: that of the mutation rate.
All the rest of the parameters were kept constant: the
population size was fixed at 100 individuals, and no
elitism was used. Also, and despite being at odds with
established GA practice, the intra-agentcrossover rate
was set to 0 - effectively disabling it. Again, this was
done so as to better observe the impact of the muta-
tion rate adaptation on the overall fitness progression.
Finally, the roulette wheel selection scheme was used.
It must be noted at this point that these parame-
ters were deliberately selected with simplicity in mind
rather than performance. In fact, it can be argued that
the parameter selection described above is rather in-
efficient, yet in being so, it allows us to better ob-
serve the impact of the design of our architecture in
the overall performance of the GA.
4.4 Inter-agent GA Configuration
Regarding the set-up of the multi-agent system, we
conducted experiments using 3, 6, 12, 24, 48 and 96
agents at a time. We also had to specify how many
iterations each agent would perform before crossover
with the other agents occurred. This parameter is de-
pendent on the available bandwidth available by the
computational platform on which the system is de-
ployed. In our case, this value was set to 10, which
was empirically found to perform best for our plat-
form.
We performed runs using three different schemes
for the inter-agent crossover:
1. No crossover: essentially, each agent’s GA run
in isolation from the others. This experiment
was implemented using MATLAB’s Genetic Al-
gorithm toolbox, which provided us with an inde-
pendent and solid performance benchmark.
2. Population crossover: during the inter-agent
crossover phase, only individuals between the dif-
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
16
ferent sub-populationswere exchanged, while GA
parameters were not recombined.
3. Full crossover: this is the scheme that we propose
in our architecture. In this case, the parameters of
the agents’ GA were also recombined in addition
to the population exchange.
The first two schemes were implemented not as
an integral part of our architecture, but instead as a
benchmark for evaluating its performance. Essen-
tially, scheme 1 emulates a set of traditional, se-
rial GAs using static parameters covering the full
available spectrum, while scheme 2 emulates a typ-
ical “island-based” GA, with migration taking place
among individual GAs that - again - use static param-
eters.
For the first and second configuration, each agent
was given a mutation rate equal to half that of the
previous agent, starting at 1.0. This means that, as
more agents were introduced in the system, their mu-
tation rate was reduced exponentially. The reason for
this decision is the fact that, in almost all GAs, later
generations benefit from increasingly smaller muta-
tion rates (Eiben et al., 2000).
For the second and third case, agents were se-
lected by their peers for crossover using roulette
wheel selection, where each agent’s fitness was dic-
tated by the average fitness of its current population.
Finally, in order to compensate for the stochastic
nature of the experiments and produce more meaning-
ful results, all runs were executed 10 times and their
output was averaged.
4.5 Evaluation of Performance
In general, the performance of a GA is measured by
the time it takes to achieve the required result (usu-
ally convergence to a stable or pre-set fitness). In our
experiments, however, we deemed it more appropri-
ate to use the number of generations as a measure of
performance. The reason for this is that the actual
execution time depends on variables which are unre-
lated to the algorithm itself, such as the capabilities
and load of the processing elements or the bandwidth
of the network on which these reside.
In all of our experiments, the population size was
the same, and thus the execution time required for
the evaluation of every population (typically the most
computationally intensive task in a GA) was also the
same. Therefore, we can assume that the number
of generations taken by the algorithm to converge is
proportional to the actual time it would require on a
benchmark computational system.
This, of course, does not take into account the
overhead incurred by network communication; how-
ever, as this overhead is again more or less equivalent
in all experiments, we can safely factor it out.
5 RESULTS
5.1 Speed of Convergence
For our first experiment, we executed runs using dif-
ferent numbers of agents and all three inter-agent
crossover schemes. Each run was stopped as soon as
a fitness of 50.0 was reached by any of the agents in
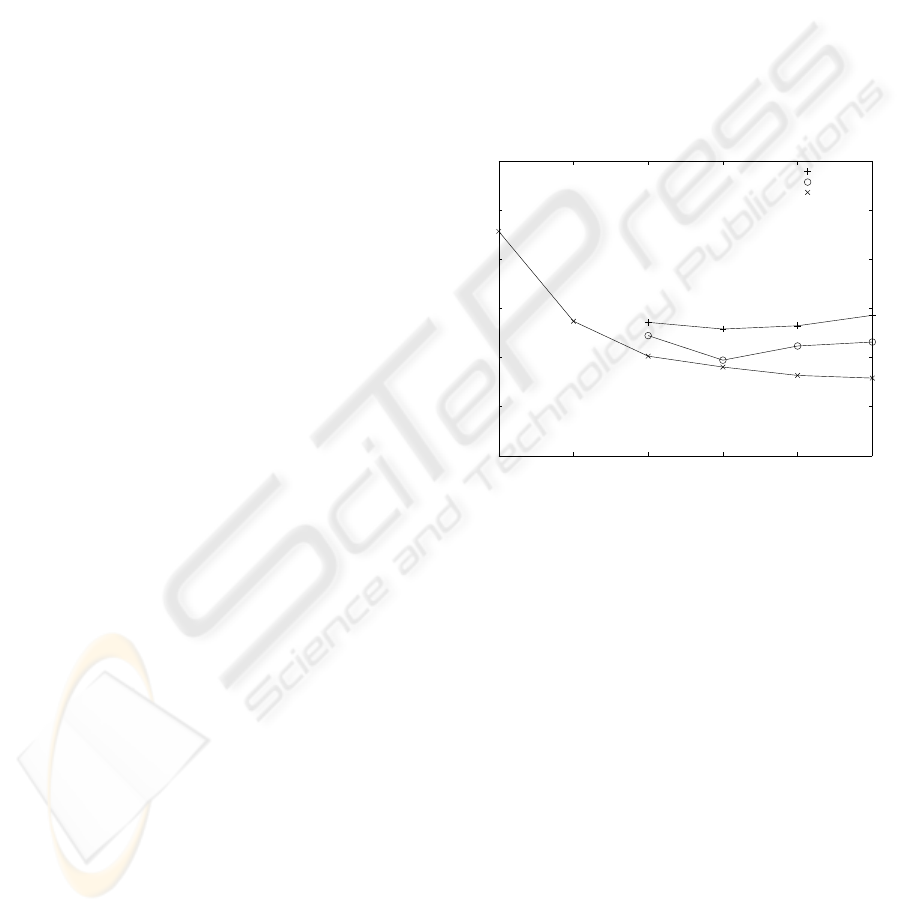
that run. Figure 1 shows the relative performance of
the three schemes (note that the x-axis is shown in
logarithmic scale).
3 6 12 24 48 96
0
50
100
150
200
250
300
Number of Agents
Number of Generations Required for Fitness 50.0
None
Population
Full
Figure 1: Relative speed performance of the three inter-
agent crossover schemes.
As can be seen, the worst performer was the first
scheme, which emulates a number of isolated sequen-
tial GAs. In addition to being the slowest, it also
failed to reach the target fitness when using too few
agents (n = 3 and n = 6) - the reason for this being
that the agents’ mutation rates were too high to allow
them to converge to the target fitness.
The population exchange scheme performed sig-
nificantly better in terms of speed, although it also
failed to converge when few agents were used (again,
the target fitness was not reached for n = 3 and n = 6).
The full crossover scheme performed even better
in terms of speed, but its most significant advantage
is the fact that it managed to reach the target fitness
even when using few agents - although at the cost of
more generations.
Finally, the downward slope of this scheme’s
curve as the number of agents increases, provides a
first suggestion towards its superior scaling proper-
ties.
COORDINATING EVOLUTION - Designing a Self-adapting Distributed Genetic Algorithm
17

5.2 Quality of Solution
The next experiment involved executing runs for 1000
generations each, again using all three inter-agent
crossover schemes for different numbers of agents.
This allowed us to see how close to the optimal fit-
ness of 0.0 each configuration converged.
Figures 2, 3 and 4 show the resulting graphs from
these runs, with the actual fitness results provided in
table 1. The y-axis of the graphs has been made loga-
rithmic in order to improve the legibility of the plots.
From these results, it becomes obvious that using
the full crossover scheme achieves the best solution in
terms of quality, in addition to being the fastest of the
three.
Furthermore, it is becoming more obvious at this
stage that the full crossover scheme scales signifi-
cantly better as the number of agents increases. The
first two schemes seem to be “hitting a wall” after the
number of agents is increased beyond 24. For the case
of the full crossover, however, adding more agents
seem to be contributing to the performance of the sys-
tem all the way up to, and including, n = 96.
Finally, the ability of this scheme to perform well
even when using a small number of agents can also be
seen in figure 4.
Table 1: Best (minimum) fitness after 1000 generations.
Scheme Best Fitness
1 (No crossover) 6.06 (at n=96)
2 (Population crossover) 1.57 (at n=48)
3 (Full crossover) 0.17 (at n=96)
0 200 400 600 800 1000
10
−1
10
1
10
2
Generations
Fitness
n=3
n=6
n=12
n=24
n=48
n=96
Figure 2: Run of 1st scheme (no inter-agent crossover) for
different numbers of agents.
0 200 400 600 800 1000
10
−1
10
1
10
2
Generations
Fitness
n=3
n=6
n=12
n=24
n=48
n=96
Figure 3: Run of 2nd scheme (population inter-agent
crossover) for different numbers of agents.
0 200 400 600 800 1000
10
−1
10
1
10
2
Generations
Fitness
n=3
n=6
n=12
n=24
n=48
n=96
Figure 4: Run of 3d scheme (full inter-agent crossover) for
different numbers of agents.
5.3 Adaptation of the Mutation Rate
As a final investigation on how the mutation rate
adapts in the full inter-agent crossover scheme, we
plotted the progress of the best agent’s mutation rate
against the generations, in a typical run using three
agents. Figure 5 illustrates the results (again using a
logarithmic y-axis). From this plot, we can see that
the mutation rate drops exponentially in order to keep
minimising the fitness, which agrees with our expec-
tations.
6 CONCLUSIONS
The results presented above are encouraging, as they
prove that this preliminary version of the architecture
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
18

0 200 400 600 800 1000
10
0
10
1
10
2
10
3
Fitness
Generations
10
−6
10
−5
10
−4
10
−3
10
−2
10
−1
10
0
Mutation Rate
Fitness
Mutation Rate
Figure 5: Adaptation of the mutation rate.
we propose is effective. By distributing the load
among multiple agents, the system manages to con-
verge to near-optimal solutions in relatively few gen-
erations.
The most important contribution, however, is the
fact that, by applying the principle of natural selec-
tion to optimise the GA agents themselves, the evolu-
tionary algorithm becomes self-adaptive and thus no
tuning is required. By eliminating the need for tuning
and thus taking the guesswork out of GA deployment,
we make evolutionary optimisation appeal to a wider
audience. In addition, the peer-to-peer architecture of
the system provides benefits such as improved robust-
ness and scalability.
7 FUTURE WORK
7.1 Complete GA Adaptation
As stated earlier, and in order to aid experimentation,
only the mutation rate is currently adapted in our sys-
tem. This is of course not very effective for a real-life
application, where the full range of genetic algorithm
parameters (population size, elite size, crossover rate,
selection strategy etc.) needs to be adapted as the
evolutionary process progresses. This extension is
relatively straightforward to implement, as the ba-
sic characteristics of the architecture’s implementa-
tion remain unaffected.
7.2 Asynchronous Agent Operation
Currently, all agents in our platform work syn-
chronously. This means that they all perform the
same number of iterations before every inter-agent
crossover stage, with faster agents waiting for the
slower ones to catch up. When the platform is de-
ployed in a network consisting of computational ele-
ments of similar capabilities, this strategy works fine.
However, in networks with diversified computational
elements, this scheme is obviously inefficient. We
aim to modify the current coordination protocol in or-
der to resolve this, by using time- or fitness-based cy-
cle lengths rather than generation-based ones.
7.3 Extended Benchmarking
Although we have established that our platform per-
forms significantly better than standard, canonical
GAs (such as the basic MATLAB implementation we
compared against), we can obtain a better picture of
how our architecture compares with other systems in
the field by performing more test runs and compar-
ing results. For instance, the systems proposed by
(Yoshihiro et al., 2003) and (Kisiel-Dorohinicki et al.,
2001; Socha and Kisiel-Dorohinicki, 2002) seem to
share some characteristics with our own system, even
though the two architectures differ in their particulars.
Even though our focus is more on the openness of the
system, it would be helpful to have an idea of the rel-
ative performance of our system with the status quo.
However, at the time of writing, implementations of
these systems were not readily accessible.
We also intend to perform more benchmarks using
alternative test functions, such as the ones presented
in (Schwefel, 1981; Ackley, 1987; Michalewicz,
1996). This way we will be able to better assess the
capability of our system to adapt to different classes
of problem, and will give us significant insight into
which evolutionary behaviour (expressed as the evo-
lutionary trajectory of each parameter) better suits
each class of problem.
7.4 Additional Solvers
Finally, it will be interesting to take full advantage of
the openness inherent to our architecture and LCC,
by allowing additional kinds of solvers to be intro-
duced in the system (e.g. gradient search, simulated
annealing etc.). This will require the re-design of our
protocol regarding the inter-agent crossover, or possi-
bly the co-existence of more than one protocol in the
system. We believe that the effort required will be jus-
tified, since, by extending our architecture in this way,
we will effectively be creating an open, peer-to-peer,
self-adaptive hybrid optimisation platform.
ACKNOWLEDGEMENTS
This research is funded in part by the EPSRC.
COORDINATING EVOLUTION - Designing a Self-adapting Distributed Genetic Algorithm
19

REFERENCES
Ackley, D. H. (1987). A connectionist machine for genetic
hillclimbing. Kluwer Academic Publishers, Norwell,
MA, USA.
Alba, E. and Troya, J. M. (1999). A survey of parallel dis-
tributed genetic algorithms. Complexity, 4(4):31–52.
Arenas, M. G., Collet, P., Eiben, A. E., Jelasity, M.,
Guerv´os, J. J. M., Paechter, B., Preuß, M., and Schoe-
nauer, M. (2002). A framework for distributed evo-
lutionary algorithms. In PPSN VII: Proceedings of
the 7th International Conference on Parallel Problem
Solving from Nature, pages 665–675, London, UK.
Springer-Verlag.
Back, T. (1992). Self-adaptation in genetic algorithms. In
Proceedings of the First European Conference on Ar-
tificial Life, pages 263–271. MIT Press.
Belding, T. C. (1995). The distributed genetic algorithm re-
visited. In Proceedings of the 6th International Con-
ference on Genetic Algorithms, pages 114–121, San
Francisco, CA, USA. Morgan Kaufmann Publishers
Inc.
Cant-Paz, E. (1998). A survey of parallel genetic algo-
rithms. Calculateurs Paralleles, 102.
Clune, J., Goings, S., Punch, B., and Goodman, E. (2005).
Investigations in meta-gas: panaceas or pipe dreams?
In GECCO ’05: Proceedings of the 2005 workshops
on Genetic and evolutionary computation, pages 235–
241, New York, NY, USA. ACM.
Eiben, A. E., Hinterding, R., Hinterding, A. E. E. R., and
Michalewicz, Z. (2000). Parameter control in evolu-
tionary algorithms. IEEE Transactions on Evolution-
ary Computation, 3:124–141.
Foster, I., Zhao, Y., Raicu, I., and Lu, S. (2008). Cloud com-
puting and grid computing 360-degree compared. In
Grid Computing Environments Workshop, 2008. GCE
’08, pages 1–10.
Goldberg, D. (1989). Genetic Algorithms in Search, Op-
timization, and Machine Learning. Addison-Wesley,
Reading, MA.
Grefenstette, J. (1986). Optimization of control parame-
ters for genetic algorithms. IEEE Transactions on Sys-
tems, Man and Cybernetics, 16(1):122–128.
Hesser, J. and M¨anner, R. (1991). Towards an optimal mu-
tation probability for genetic algorithms. In PPSN I:
Proceedings of the 1st Workshop on Parallel Prob-
lem Solving from Nature, pages 23–32, London, UK.
Springer-Verlag.
Holland, J. (1975). Adaptation in Natural and Artificial Sys-
tems. University of Michigan Press, Ann Arbor, MI.
Kisiel-Dorohinicki, M., Socha, K., and Communication, S.
T. E. (2001). Crowding factor in evolutionary multi-
agent system for multiobjective optimization. In Pro-
ceedings of IC-AI01 International Conference on Ar-
tificial Inteligence. CSREA Press.
Lim, D., Ong, Y.-S., Jin, Y., Sendhoff, B., and Lee, B.-S.
(2007). Efficient hierarchical parallel genetic algo-
rithms using grid computing. Future Gener. Comput.
Syst., 23(4):658–670.
Meyer-Nieberg, S. and Beyer, H.-G. (2006). Self-adaptation
in evolutionary algorithms. In Parameter Setting in
Evolutionary Algorithm, pages 47–76. Springer.
Michalewicz, Z. (1996). Genetic algorithms + data struc-
tures = evolution programs (3rd ed.). Springer-Verlag,
London, UK.
Munawar, A., Wahib, M., Munetomo, M., and Akama, K.
(2008). A survey: Genetic algorithms and the fast
evolving world of parallel computing. High Perfor-
mance Computing and Communications, 10th IEEE
International Conference, pages 897–902.
Nowostawski, M. and Poli, R. (1999). Parallel genetic al-
gorithm taxonomy. In Proceedings of the Third Inter-
national, pages 88–92. IEEE.
Robertson, D. (2004a). A lightweight coordination calculus
for agent systems. In In Declarative Agent Languages
and Technologies, pages 183–197.
Robertson, D. (2004b). Multi-agent coordination as dis-
tributed logic programming. In International Confer-
ence on Logic Programming, Sant-Malo, France.
Robertson, D., Giunchiglia, F., van Harmelen, F., March-
ese, M., Sabou, M., Schorlemmer, M., Shadbolt, N.,
Siebes, R., Sierra, C., Walton, C., Dasmahapatra, S.,
Dupplaw, D., Lewis, P., Yatskevich, M., Kotoulas, S.,
de Pinninck, A. P., and Loizou, A. (2006). Open
knowledge semantic webs through peer-to-peer inter-
action. Technical Report DIT-06-034, University of
Trento.
Ross, P. and Corne, D. (1995). Applications of genetic al-
gorithms. In On Transcomputer Based Parallel Pro-
cessing Systems, Lecture.
Schwefel, H.-P. (1981). Numerical Optimization of Com-
puter Models. John Wiley & Sons, Inc., New York,
NY, USA.
Socha, K. and Kisiel-Dorohinicki, M. (2002). Agent-
based evolutionary multiobjective optimisation. In in
Proceedings of the Fourth Congress on Evolutionary
Computation, pages 109–114. press.
Tanese, R. (1989). Distributed genetic algorithms. In Pro-
ceedings of the third international conference on Ge-
netic algorithms, pages 434–439, San Francisco, CA,
USA. Morgan Kaufmann Publishers Inc.
Tuson, A. L. (1995). Adapting operator probabilities in ge-
netic algorithms. Technical report, Master’s thesis,
Evolutionary Computation Group, Dept. of Artificial
Intelligence, Edinburgh University.
Yoshihiro, E. T., Murata, Y., Shibata, N., and Ito, M. (2003).
Self adaptive island ga. In 2003 Congress on Evolu-
tionary Computation, pages 1072–1079.
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
20
