
DYNAMIC CONTROL OF MOBILE AD-HOC NETWORKS
Network Protocol Parameter Adaptation using Organic Network Control
Sven Tomforde, Bj
¨
orn Hurling and J
¨
org H
¨
ahner
Institute of Systems Engineering, Leibniz Universit
¨
at Hannover, Appelstr. 4, 30167 Hannover, Germany
Keywords:
Organic computing, Self-optimising data communication protocols, Framework for protocol control, Mobile
ad-hoc networks.
Abstract:
Data communication protocols show an increasing complexity in terms of variable configurations – especially
if their target execution area is highly dynamic. One domain that represents these characteristics are mobile
ad-hoc networks (MANets). Since nodes are moving, the situation surrounding a particular node is steadily
changing. This provides the opportunity to significantly increase the system’s performance by continuously
adapting the protocol. This paper demonstrates the benefit of such an adaptation using the Organic Network
Control (ONC) system. Based upon a brief overview of ONC, the adjustment of the framework to enable
the control of MANets is described, followed by a simulation-based evaluation using an exemplary broadcast
protocol.
1 INTRODUCTION
As the number of interconnected devices and the cor-
responding transfer load of data communication net-
works is steadily increasing, networks reach their lim-
its. This leads to the insight that the currently used
techniques (e. g. protocols and infrastructure) will not
be able to cope with the demand in the near future
(Handley, 2006). Based upon this assumption, re-
searchers develop new concepts (e. g. for the Internet
(Siekkinen et al., 2007)). To cope with the problem,
two approaches are possible: Develop new protocols
(with higher complexity in terms of more parame-
ters) and increase the quality of service or dynam-
ically adapt existing protocols to changing environ-
ments, which is done by the Organic Network Control
(ONC) system (introduced in (Tomforde et al., 2009a;
Tomforde et al., 2009b)).
The ONC system is based on the principles of
Organic Computing (Schmeck, 2005) which is a re-
cent research area focusing self-organisation to deal
with complex problems. Autonomous entities are act-
ing without strict central control and achieve global
goals although their decisions are mainly based on lo-
cal knowledge. The authors assume that due to the
complexity of the particular tasks not all situations
can be foreseen during the development process of
the system. Therefore, the system must be adaptive
and equipped with learning capabilities, which leads
to the ability to learn new actions and strategies for
previously unknown situations. The self-control of
network entities is also part of the focus of Autonomic
Computing (Kephart and Chess, 2003).
A demanding challenge for the ONC system is
the control and adaptation of mobile ad-hoc network
(MANet) protocols as they are processed in highly
dynamic environments. The possible movement of
nodes leads to a continuous change of the situation:
Neighbours are getting out of reach or joining the
sending distance. This does not only lead to complex
problems of how to configure the protocol, it also of-
fers high potential for an improvement of the system
performance. Within this paper, we explain how the
ONC system is applied to a MANet broadcast proto-
col and how the overall performance of the MANet
system can be increased using ONC.
This paper demonstrates the application of the
ONC system to MANet-based broadcast protocols
by dynamically adapting network protocol parame-
ters (e. g. values for timeouts, maximum number of
re-transmissions, number of open connections, etc.).
Section 2 describes the related work and gives a sum-
mary of approaches to adapting network protocols dy-
namically to changing environments, followed by an
overview of the ONC system in Section 3. In Sec-
tion 4, we explain how the ONC system can be ap-
plied to a new protocol and what is actually done
to enable MANet protocol control using ONC. Af-
28
Tomforde S., Hurling B. and H
¨
ahner J. (2010).
DYNAMIC CONTROL OF MOBILE AD-HOC NETWORKS - Network Protocol Parameter Adaptation using Organic Network Control.
In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pages 28-35
Copyright
c
SciTePress

terwards, Section 5 demonstrates the benefit of us-
ing ONC by explaining and analysing the achieved
results. Finally, Section 6 summarises the presented
system and names further research to be done.
2 RELATED WORK
Autonomic adaptation of networks is part of the focus
of Autonomic Computing (Kephart and Chess, 2003).
Researchers have considered the problem to adapt
network protocols for many years: from off-line opti-
misation when presenting a new protocol to adapting
protocol configurations during runtime. For the off-
line optimisation, several examples can be found in
literature, but none aims at providing a generalised
approach for more than one specific protocol (see,
e.g., (Montana and Redi, 2005; S
¨
ozer et al., 2000;
Turgut et al., 2002)). Due to time and computational
restrictions, on-line adaptation is a more complex task
compared to the off-line part. Besides the ONC ap-
proach, different directions of research are known to
cope with the problem: adaptive protocols, compo-
sition of protocol stacks, or centralised solutions to
adapt protocol configurations.
The most obvious way of dealing with the prob-
lem is to develop adaptive protocols which are able to
handle dynamic environments. One example has been
presented in (Whiteson and Stone, 2004). They intro-
duced an on-line learning mechanism to increase the
performance of a routing protocol. Based on the Q-
routing techniques presented in (Boyan and Littman,
1994), they learn the best routes by receiving imme-
diate answers of the next hop. Another example has
been introduced in (Huang et al., 2009). They present
an adaptive medium access control (MAC) protocol
framework. Since the radio node density and ser-
vice requirements can vary widely over time, they de-
fined the need of an adaptation to changing environ-
ments and needs. Their protocol prototype can switch
between CSMA and TDMA within a radio platform
scenario. Both approaches rely on the existence of
a protocol extension covering the learning/adaptation
information. In contrast to the ONC system, they
are system-specific solutions and cannot be applied
to other protocols.
Since developing new protocols for all possi-
ble adaptation and learning processes is not feasi-
ble, a research field called protocol stack composition
emerged covering the upcoming tasks by exchanging
protocols and stacks dynamically (Rosa et al., 2007).
In contrast to the ONC system which keeps the exist-
ing and currently used techniques and optimises their
behaviour, this field of research re-combines the pro-
tocols. Although the target deviates from the ONC
approach (the protocol stack exchange has impact on
all involved systems and can hardly be done locally),
the approach has some similarities. The most impor-
tant representatives are Appia (Miranda et al., 2001),
Cactus (Hiltunen et al., 2000), Ensemble (van Re-
nesse et al., 1998), and Horus (van Renesse et al.,
1996). Additionally, the recent work done by Mena
et al. (Mena et al., 2003) has to be named. Besides the
locality aspect, some characteristics of the approach
separate it from the requirements of the ONC frame-
work: the protocols and their configurations have to
be known in advance and further extensions with new
behavioural repertoire are not possible.
The approach presented in (Sch
¨
oler and M
¨
uller-
Schloer, 2004) is also dealing with a kind of proto-
col composition, but is already a bit more focused on
the techniques used within the ONC system. The au-
thors describe their adaptive monitoring architecture
for protocol stack configuration and demonstrate the
integration in the Observer/Controller pattern of Or-
ganic Computing. The learning part is covered by
a Fuzzy Learning Classifier System (Casillas et al.,
2004). Due to the usage of the same architectural
pattern (Observer/Controller), the approach has some
similarities with the ONC system. Unlike the ONC
framework, the approach is built again without of-
fering the opportunity of handling different protocols
and extending the set of solutions on demand.
On-line adaptation of protocols itself has been fo-
cused by researchers before. (Sudame and Badrinath,
2001) presents a first TCP- and UDP-based study and
defined the need of dynamic adaptation, but detailed
examination and a demonstration of the re-usability
for other protocols is still missing. Currently, there
exist only two approaches covering a similar target
as ONC: the systems introduced by Ye et al. and by
Georganopoulos and Lewis. The former one (Ye and
Kalyanaraman, 2001) introduces an adaptive random
search algorithm which tries to combine the stochas-
tic advantages of pure random search algorithms with
threshold-based knowledge. Their approach is based
on the initial system as presented in (Ye et al., 2001).
In contrast to our approach, Ye et al. propose a cen-
tralised system that tackles the optimisation task for
each node. To allow for such a division of work
between a central server and the particular network
nodes, problems like e. g. bandwidth usage, single
point of failure, or local knowledge accessible from
server-side have to be covered.
The second system has been presented in 2007
(Georganopoulos and Lewis, 2007) and introduces a
dynamic optimisation framework for the reconfigura-
tion of network protocols at all layers of the protocol
DYNAMIC CONTROL OF MOBILE AD-HOC NETWORKS - Network Protocol Parameter Adaptation using Organic
Network Control
29

stack. In order to optimise the performance of the sys-
tem depending on given goals, different entities can
be adjusted (applications, protocols, etc.) or replaced.
Again, the system relies mainly on a centralised el-
ement being responsible for the optimisation tasks.
The focus of the initial paper has been set on cross-
layer optimisation for the protocol stack, but less on
considering environmental conditions. Hence, the au-
thors demonstrated the performance of the solution
by applying it to two different layers of the protocol
stack: the link and the network layer. A detailed proof
of the approach and insights on the currently vague
blackbox dynamic optimisation engine are still miss-
ing, consequently a suitability of the approach cannot
be estimated – although some criteria (centralised el-
ement, low re-usability of existing protocols, etc.) are
contradicted for the ONC requirements.
3 THE ORGANIC NETWORK
CONTROL SYSTEM
The Organic Network Control (ONC) system has
been introduced in (Tomforde et al., 2009a; Tomforde
et al., 2009b). The system’s architecture is founded
on the generic Observer/Controller approach as pre-
sented by Richter et al. in (Richter et al., 2006) and
is organised using three consecutive layers, see Fig-
ure 1.
Layer 0 encapsulates an existing network protocol
instance, e.g. a broadcast algorithm for mobile ad-hoc
networks (MANets) or a Peer-to-Peer (P2P) protocol.
In terms of Organic Computing, this controlled net-
work protocol instance is the ”System under Obser-
vation and Control” (SuOC). The ONC system aims
at providing a basic solution to control existing proto-
cols dynamically without the need of knowing inter-
nals of the particular protocol or interfering with the
protocol logic. However, it is required that the pa-
rameters of the protocol can be altered by the ONC
system. Additionally, the current status of the proto-
col instance and the environment it acts in have to be
observable and accessible locally. For MANets, one
of the most important factors describing the current
status of the protocol instance’s environment is the
neighbourhood of other nodes. Besides this observ-
able environment, a performance measure (also called
fitness or evaluation function) quantifying good and
bad performance has to be provided in order to evalu-
ate the current performance of the protocol.
Layer 1 of the ONC architecture aims at adapting
the SuOC dynamically to changes in the environment.
It therefore consists of two basic components: an Ob-
server and a Controller containing a machine learning
Figure 1: Architecture of the ONC system.
component (which is currently realised as a Learning
Classifier System (LCS)). The Observer is responsi-
ble for locally collecting status information about the
network protocol instance and its settings. Addition-
ally, it aggregates the observed figures and augments
them with optional further knowledge (e.g. prediction
values, historic knowledge, etc.) and builds a vector
describing the current situation at the node. This sit-
uation vector then serves as input to the Controller
which has to fulfill two tasks: evaluate the system’s
performance within the last evaluation cycle and de-
cide about the next action to be taken. The main com-
ponent of the Controller is a LCS which is realised as
an adapted variant of Wilson’s XCS (Wilson, 1995).
The LCS is responsible for choosing the next action
– based on the situation vector. The result of the se-
lection process is an action (a configuration of param-
eter sets for the controlled protocol) and a prediction
value of how the system will perform after applying
the action. To evaluate the system’s performance, the
Controller compares the system’s performance mea-
sure (the fitness function) with the last prediction and
calculates the reward for the LCS to enable the au-
tomated learning. In case the LCS does not contain
a matching parameter set, new classifiers need to be
created. In contrast to the original LCS algorithm,
however, the ONC architecture does not allow new
classifiers (pairs of situation/conditions and parame-
ters/actions) to be created randomly by Genetic Algo-
rithms. Instead, control is transferred to Layer 2 of
the ONC architecture.
Layer 2 of the ONC system is again designed us-
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
30
ing the Observer/Controller pattern: The Observer
monitors the Layer 1 component and realises the need
of a new classifier, it therefore receives the situation
vector. The Controller part contains two basic com-
ponents: a simulator and an Evolutionary Algorithm
(EA). The Controller creates an appropriate simula-
tion scenario from the situation vector and triggers
the EA to repeatedly evolve a number of parameter
sets for the network protocol. These parameter sets
are evaluated in the simulator. This bears the advan-
tage that newly created parameter sets are not directly
used in the live system, as this can cause the system
to perform badly or even malfunction. Only those pa-
rameter sets that qualify in the simulator of Layer 2
are passed back to Layer 1 and may then be applied
in the real world. Therefore, Layer 2 allows for a kind
of sandbox-learning without the risk of applying arbi-
trary parameter sets to the live system.
The ONC approach as described before provides
a black-box solution to control different types of net-
work protocols. In order to integrate a new proto-
col into the ONC architecture and consequently en-
able ONC controlling the protocol, an engineer has
to fulfill three major tasks: Specify the performance
metric, describe the situation (what are the dynamic
factors defining the need of an adaptation, e.g. avail-
able neighbours and their positions in MANets) ac-
companied by a distance function between two sit-
uations, and provide a simulation model to enable
the simulation-based optimisation process of Layer 2.
Within the following Section, we describe how the
ONC system is applied to MANet protocols.
4 DYNAMIC CONTROL OF
MOBILE AD-HOC NETWORKS
This Section describes how ONC is adapted to allow
for the control of MANet protocols - based on the
tasks named within the last Section. In order to keep
the same organisation as before, this Section again
distinguishes between the three layers and describes
what has to be done on each layer.
The focus of Layer 0 is to integrate a new proto-
col into the framework. Therefore, the engineer has to
describe its observation and control process leading to
the need of two interfaces: one for accessing the pro-
tocol parameters and one for collecting information
about the local status of the system. The former in-
terface enables the framework to adapt the behaviour
of the protocol which means the parameter settings
can be adapted at runtime. In the latter interface, the
engineer has to define what is relevant and influences
the protocol’s performance - we call this the situa-
tion the system is in. In a MANet environment, the
most important factor influencing the protocol’s per-
formance is the distribution of other nodes within its
sending and sensing range. Therefore, a sector-based
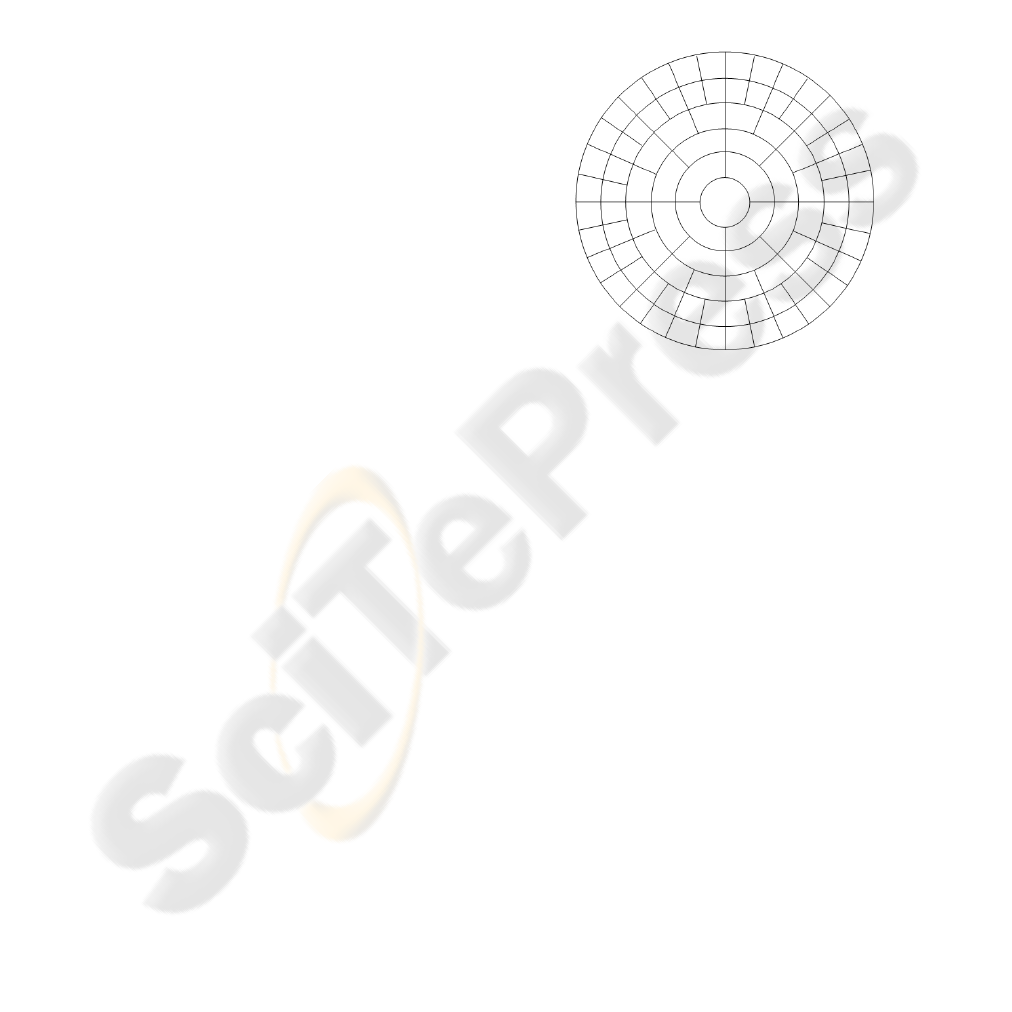
approach as depicted in Figure 2 has been developed.
The radius of the outer circle is equal to the sensing
distance (sensDist) of the node, as this is the most re-
mote point where messages of this node can interfere
with other ones. Typically, the transmission range
for Wireless-LAN based MANets is about 250 meter
(half of the sensing distance). The radii of the inner
circles have been chosen empirically.
Figure 2: Environment representation.
As nodes within the first circle are really close
(50m), their exact position does not matter. The sec-
ond circle (125m) has been partitioned into 4 sectors,
the third circle (200m) into 8 sectors, and the forth
circle (250m, maximum transmission range) into 16
sectors. The next two circles (375m and 500m) are
representing the area within sensing range - with both
circles divided into 32 sectors each. We assume that
a node is able to determine the current positions of its
neighbours in sensing range relative to its own posi-
tion (e. g. based on GPS, see (Pahlavan and Krishna-
murthy, 2001)). Additionally, the node’s direction of
movement is needed since it has high influence on the
best parameter set (e. g. moving towards/away from a
set of nodes influences the delay). Due to the sector-
based approach, situations are generalised which is
necessary to avoid evolving a rule for each situation.
The Layer 1 component is responsible for the
adaptation process and for increasing the system’s
performance by learning. Again, two aspects have to
be considered: a learning feedback and a measure-
ment to compare different situations. To enable the
learning feedback, a fitness or evaluation function is
needed. Several fitness functions have been proposed
for MANet protocols. Since our current focus is set
on MANet-based broadcast algorithms, the standard
functions are Packet Delivery Ratio and Packet La-
DYNAMIC CONTROL OF MOBILE AD-HOC NETWORKS - Network Protocol Parameter Adaptation using Organic
Network Control
31

tency – both cannot be measured locally at each node.
Based upon the locally available information, the tar-
get is to reduce the number of forwarded broadcasts
and assure the delivery of the broadcast to each node
at the same time. Therefore, we introduce the follow-
ing formula:
Fit(x) =
#RecMess
#FwMess
The variable x stands for the currently observed
network protocol instance. Since a new parameter set
has to be applied for a minimum duration to show its
performance, we use evaluation cycles defining dis-
crete time slots. The duration of the cycle depends
on how dynamic an environment is: The faster it
changes, the shorter is the cycle to be chosen. For
the last evaluation cycle, the function takes into ac-
count the sum of all messages being forwarded by all
of the neighbours and the node to be evaluated within
the last evaluation cycle (#FwMess), and the sum of
all messages being received by them (#RecMess).
The second aspect on Layer 1 is the comparison
of situations: we need to quantify the distance of two
situations. The target is that more similar situations
will receive a low distance value and those having low
similarity will receive a high distance value. Based
upon the sector-based situation description as intro-
duced before, a measure for the similarity of two enti-
ties (A, B) can be defined. To be able to determine the
distance, the possible influence of rotation and reflec-
tion are deducted initially. Afterwards, the formula
for the distance (δ) can be defined with r ∈ RADII
and s ∈ SECT ORS as follows:
δ(A,B) =
∑
r
∑
s
(A
r,s
− B
r,s
)
2
/r.distance
The function r.distance defines the radius size as
introduced before (50m, 125m, . . . ). A
r,s
gives the
number of neighbours within the sector s of radius
r for the situation description A. This means that the
importance of a node’s neighbour decreases if it is sit-
uated within an outer radius.
Finally, Layer 2 has to be able to build adequate
simulation scenarios out of the information obtained
by Layer 1. In ONC, we use the standard network
simulation tool NS-2 (Fall, 1999), but this can eas-
ily be exchanged by other solutions. The network
simulator NS-2 has a large set of integrated or avail-
able standard protocols, but for recently developed
or proprietary protocols a simulation model probably
does not exist. The engineer has to provide a realistic
model (as it is also used during the protocol develop-
ment) which can be adapted to the observed situation
by generating an appropriate scenario. The adapta-
tion of the scenario is done using the configuration
interface by considering the observed situation of the
node, e.g., a randomised instance of the sector-model
is created defining the distribution of the neighbour-
ing nodes and the movement direction of the node is
transmitted to NS-2 using the same coordinate system
as for the observed system. After finishing the previ-
ously described tasks, ONC is able to control MANet-
based protocols. The benefit of the dynamic control
is demonstrated in the next Section.
5 EVALUATION
Based upon the previously described adaptations,
ONC is able to control MANets. Within this Sec-
tion, the results of the evaluation are presented. Since
the adaptation of protocols is organised locally - but
has high influence on the network-level, both aspects
are taken into consideration. Therefore, we start with
the experimental setup, followed by a short introduc-
tion of the analysed protocol, and conclude with the
achieved results for the local and the network-wide
view.
5.1 Experimental Setup
The ONC framework is implemented in JAVA. The
moving agents communicating via the MANet pro-
tocol are simulated using the Multi-Agent Simulation
Toolkit MASON (Luke et al., 2004), with each agent’s
protocol instance representing a SuOC of the architec-
ture as depicted in Figure 1. The respective Layer 1
Controller is an adapted Learning Classifier System as
described in (Tomforde et al., 2009b). At Layer 2, the
standard network simulation tool NS-2 (Fall, 1999)
is used to evolve new parameter sets in combination
with a standard Genetic Algorithm (population size:
15, new children per iteration: 7, mutation rate: 0.2
per child, all children via crossover with fitness-based
selection of parents). We use two different simulation
tools in order to avoid having exactly the same condi-
tions while optimising rules, since a complete copy of
the current situation observed in the real environment
within the simulator is not realistic. 100 agents have
been created and applied to the simulated area, which
has dimensions of 1000 x 1000 cells (corresponds to
1000 x 1000 meters). The agents move according to a
random-waypoint-model. The Physical/Mac layer is
an IEEE 802.11 in ad-hoc mode at 2 Mbps.
To demonstrate the performance of ONC control-
ling MANets, we choose the Reliable Broadcast Pro-
tocol (R-BCast) as introduced in (Kunz, 2003), since
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
32

this protocol is representative for the research field
of reliable broadcast protocols in MANets. In order
to achieve reliability and increase the packet delivery
ratio compared to other protocols, additional effort
is made by equipping the nodes with extra buffers.
These round-robin based buffers are used to store the
last p unique packets the particular nodes received.
In contrast to other protocols, the R-BCast protocol
has significantly more variable parameters and conse-
quently the task to control the protocol is more com-
plex, but it also offers a higher potential benefit due to
a dynamic adaptation. The parameters being subject
to ONC control actions are: Delay (Maximum decel-
eration time between receiving and forwarding of a
message), Allowed Hello-loss (Maximum number of
Hello-messages, which may be lost until a node is as-
sumed to be out of transmission range), HelloInter-
val (Interval between two Hello-messages), δ Hello-
Interval (Randomises Hello-Interval), Packet count
(Number of the last x stored NACK messages), and
Minimum difference (Minimum difference between
NACK messages). Details on the parameters and the
protocol can be found in (Kunz, 2003).
5.2 Experimental Results
In order to analyse the performance of the ONC sys-
tem, the simulation is repeated for two cases under
the same restrictions and using the same seeds for the
randomised values: a) all nodes are uncontrolled (no
ONC system) and use the manually optimised stan-
dard configuration of the protocol, and b) all nodes
have an own instance of the ONC system to control
their protocol configuration. All values presented in
the remainder of this Section are averaged values re-
ceived from three runs, where each run has a dura-
tion of 10,000 simulated seconds. During one run of
the scenario, 17,400 BCast-messages have been sim-
ulated. The learning component has been trained us-
ing 10 complete runs with different seeds – leading
to completely different movements of the nodes and
along with these to different situations.
The performance measurement relies on the fit-
ness function as described for the local feedback
mechanism of the learning component (Section 4).
Since the evaluation takes both views into account (lo-
cal and network-wide view), the x in Fit(x) refers to
different systems: a) In the local view x stands for the
local network protocol instance of the node and b) on
network-level obtained for reference, x represents the
set of protocol instances within the network and gives
an averaged value for all instances.
Figure 3 plots the system’s performance consid-
ering only one node. The X-axis describes the sim-
ulation time (in simulated seconds) and the Y-axis
the measured fitness value. In principle, all simu-
lated nodes show a comparable behaviour; this spe-
cific node has been explicitly chosen to demonstrate
the typical differences between an ONC-controlled
and an uncontrolled node. During the simulation, the
node gets separated from the rest of the network (no
other nodes within sending distance) between simu-
lation seconds 7,350 and 7,700. Within this interval,
the fitness is 0 for both cases. But especially these sit-
uations demonstrate the benefit of ONC control: The
delays have been lengthened so that the node receives
more old messages when it arrives back in sending
distance of another node resulting in a quicker recov-
ery of the ONC-controlled system.
Another observation that can be made considering
Figure 3 is the impact of the learning module. To be
able to learn, it has to be allowed to try different rules
and not to use always the best matching one. E.g.
at simulation second 1,800, the learning component
tried a rule that results in a performance slightly worse
than the standard protocol configuration. These small
drawbacks have to be taken into account to achieve
an improvement for the system. Averaged over the
complete simulation time (10,000 simulated seconds),
the performance of the protocol instance has been en-
hanced in terms of the fitness function from 0.8270
(all nodes perform the standard protocol without any
adaptation) to 0.8991 which is an increase of 8.71%.
Figure 4 depicts the averaged performance of the
network protocol instances on network-level. The av-
eraging leads to the effect that separation of single
nodes influences the performance only slightly. Nev-
ertheless, Figure 4 shows two drops (simulation sec-
onds 3,850 to 4,200 and 7,450 to 7,550). The first
drop can be explained by a split of the set of nodes –
about 30 nodes are not within sending distance of the
rest. Here, two different networks have been estab-
lished. Within the second drop, again, a larger group
(18 nodes) has been separated from the rest of the
network. Despite these separation effects, the per-
formance of the system has been increased. When
all nodes perform just the standard protocol configu-
ration without any adaptation, the resulting averaged
fitness is 0.8760. The same simulation with additional
ONC control for all nodes leads to an averaged fit-
ness value of 0.9456 which is an increase of 7.94%.
Both aspects of the fitness function are responsible
for the increase: The number of forwarded messages
has been decreased slightly, whereas the number of
received messages has been increased more signifi-
cantly.
DYNAMIC CONTROL OF MOBILE AD-HOC NETWORKS - Network Protocol Parameter Adaptation using Organic
Network Control
33


Hiltunen, M. A., Schlichting, R. D., Ugarte, C. A., and
Wong, G. T. (2000). Survivability through customiza-
tion and adaptability: the cactus approach. In Proc.
of DARPA Information Survivability Conference and
Exposition (DISCEX’00), volume 1, pages 294 – 307.
Huang, K.-C., Jing, X., and Raychaudhuri, D. (2009). Mac
protocol adaptation in cognitive radio networks: An
experimental study. Int. Conf. on Computer Commu-
nications and Networks, 0:1–6.
Kephart, J. O. and Chess, D. M. (2003). The Vision of
Autonomic Computing. IEEE Computer, 36(1):41–
50.
Kunz, T. (2003). Reliable Multicasting in MANETs. PhD
thesis, Carleton University.
Luke, S., Cioffi-Revilla, C., Panait, L., and Sullivan, K.
(2004). MASON: A New Multi-Agent Simulation
Toolkit. In Proc. of the 2004 Swarmfest Workshop.
Mena, S., Schiper, A., and Wojciechowski, P. (2003). A step
towards a new generation of group communication
systems. In Proceedings of the International Confer-
ence on Middleware, pages 414–432. Springer-Verlag,
New York.
Miranda, H., Pinto, A., and Rodrigues, L. (2001). Appia:
A flexible protocol kernel supporting multiple coordi-
nated channels. In Proceedings of the 21st Int. Conf.
on Distributed Computing Systems (ICDCS’01).
Montana, D. and Redi, J. (2005). Optimizing parameters of
a mobile ad hoc network protocol with a genetic algo-
rithm. In Proc. of the Conf. on Genetic and Evolution-
ary Computation (GECCO’05), pages 1993–1998.
Pahlavan, K. and Krishnamurthy, P. (2001). Principles of
Wireless Networks: A Unified Approach. Prentice Hall
PTR, Upper Saddle River, NJ, USA.
Richter, U., Mnif, M., Branke, J., M
¨
uller-Schloer, C.,
and Schmeck, H. (2006). Towards a generic ob-
server/controller architecture for Organic Computing.
In GI Jahrestagung (1), pages 112–119.
Rosa, L., Rodrigues, L., and Lopes, A. (2007). Appia to
r-appia: Refactoring a protocol composition frame-
work for dynamic reconfiguration. Technical report,
Department of Informatics, University of Lisbon.
Schmeck, H. (2005). Organic Computing – A new vision
for distributed embedded systems. In Proc. of the 8th
Int. Symp. on Object-Oriented Real-Time Distributed
Computing (ISORC’05), pages 201–203.
Sch
¨
oler, T. and M
¨
uller-Schloer, C. (2004). Design, imple-
mentation and validation of a generic and reconfig-
urable protocol stack framework for mobile terminals.
In Proc. of the 24th Int. Conf. on Distributed Comput-
ing Systems (ICDCSW’04), pages 362–367.
Siekkinen, M., Goebel, V., Plagemann, T., Skevik, K.-A.,
Banfield, M., and Brusic, I. (2007). Beyond the Future
Internet–Requirements of Autonomic Networking Ar-
chitectures to Address Long Term Future Networking
Challenges. Future Trends of Distributed Computing
Systems, IEEE International Workshop, pages 89–98.
S
¨
ozer, E. M., Stojanovic, M., and Proakis, J. G. (2000). Ini-
tialization and routing optimization for ad-hoc under-
water acoustic networks. In Proc. of Opnetwork’00.
Sudame, P. and Badrinath, B. R. (2001). On providing sup-
port for protocol adaptation in mobile wireless net-
works. Mob. Netw. Appl., 6(1):43–55.
Tomforde, S., Cakar, E., and H
¨
ahner, J. (2009a). Dy-
namic Control of Network Protocols - A new vision
for future self-organised networks. In Proc. of the 6th
Int. Conf. on Informatics in Control, Automation, and
Robotics (ICINCO’09), pages 285 – 290.
Tomforde, S., Steffen, M., H
¨
ahner, J., and M
¨
uller-Schloer,
C. (2009b). Towards an Organic Network Control
System. In Proceedings of the 6th International
Conference on Autonomic and Trusted Computing
(ATC’09), pages 2 – 16. Springer Verlag.
Turgut, D., Daz, S., Elmasri, R., and Turgut, B. (2002).
Optimizing clustering algorithm in mobile ad hoc net-
works using genetic algorithmic approach. In Proc.
of the IEEE Global Telecommunications Conference
(GLOBECOM ’02), pages 62 – 66.
van Renesse, R., Birman, K., Hayden, M., Vaysburd, A.,
and Karr, D. (1998). Building adaptive systems using
ensemble. Softw. Pract. Exper., 28(9):963–979.
van Renesse, R., Birman, K. P., and Maffeis, S. (1996). Ho-
rus: a flexible group communication system. Commu-
nications of the ACM, 39(4):76–83.
Whiteson, S. and Stone, P. (2004). Towards autonomic
computing: adaptive network routing and scheduling.
In Proceedings of the International Conference on Au-
tonomic Computing (ICAC’04), pages 286–287.
Wilson, S. W. (1995). Classifier fitness based on accuracy.
Evolutionary Computation, 3(2):149–175.
Ye, T., Harrison, D., Mo, B., Sikdar, B., Kaur, H. T., Kalya-
naraman, S., Szymanski, B., and Vastola, K. (2001).
Network Management and Control Using Collabora-
tive On-line Simulation. In Proceedings of IEEE ICC,
Helsinki, Finland. IEEE.
Ye, T. and Kalyanaraman, S. (2001). An adaptive random
search algorithm for optimizing network protocol pa-
rameters. Technical report, Rensselaer Polytechnic
Inst.
DYNAMIC CONTROL OF MOBILE AD-HOC NETWORKS - Network Protocol Parameter Adaptation using Organic
Network Control
35
