
DETECTION OF EXIT NUMBER FOR THE BLIND AT THE
SUBWAY STATION
Ho-Sub Yoon, Jae Yeon Lee
Robot Division, ETRI, Kajung, Taejeon, Korea
Eun-Mi Ji
Department of Medical Information, HyeChon University, Taejeon, Korea
Keywords: Digit Character Detection, Blind Guidance System.
Abstract: This paper presents an approach for detecting the exit number to enhance the safety and mobility of blind
people while walking around subway station. It is extremely important for a blind person to know whether a
frontal area is a correct exit number or not. In a crossing at each exit roads, the usual black exit number is
painted with blue circle contour that have white background in Taejon subway station. An image-based
technique has been developed to detect the isolated number pattern at the crossing roads. The presences of
exit numbers are inferred by careful analysis of numeral width, height, rate, number of numerals, as well as
bandwidth trend. If we have several candidates of numerals, we adapt to the OCR function. Experimental
evaluation of the proposed approach was conducted using several real images with and without exit roads. It
was found that the proposed technique performed with good accuracy.
1 INTRODUCTION
According to the World Health Organization
statistics, approximately 40 million people are blind
all over the world (Thylefors, 1995 and WHO,
1997). There are about 200,000 persons with
acquired blindness in Korea. Visually impaired
people have one goal that to navigate through
unfamiliar spaces with out the human guide helps to
establish this navigation. Mobility, which has been
defined as “the ability to travel safely, comfortably,
gracefully, and independently through the
environment,” (Shingledecker, 1978) is the main
barrier for these vision-disabled people. The most
widely used navigational aids for blind people are
the white cane and the guide dog. However, these
have many limitations: the range of detection of
special patterns or obstacles using a cane is very
narrow and a guide dog requires extensive training
and is not suitable for people who are not physically
fit or cannot maintain a dog (Whitestock, 1997). To
improve the versatility of the white cane, they use
many methods and devices to aid in mobility and to
increase safe and independent travel as in
(Diepstraten, 2004, Hub, 2006, and Matsuo, 2002).
When a visually impaired person is walking around
at the subway station, it is important to get exit
number information which is present in the scene. In
general, way finding into a man-made environment
is helped considerably by the ability to read exit
number signs. This paper presents the development
of an automatic detection of exit number for visually
impaired people at the subway station.
The researches on text extraction from natural
scene images have been growing recently. Many
methods have been proposed based on edge
detection (Yamaguchi, 2003), binarization (Matsuo,
2002), spatial-frequency image analysis (Liu, 1998)
and mathematical morphology operations (Gu,
1997). There are also other parallel research efforts
to develop a scene-text reading system for the
visually impaired (Zandifar, 2002).
All these systems make evident that the text
areas cannot be perfectly extracted from the image
because natural scenes consist of complex objects,
various lightings, giving rise to false text detection
and misses. The first step in developing our digit
reading system is to address the problem of text
detection in natural scene images. In this paper, we
assumed the fixed indoor space as same as subway
543
Yoon H., Yeon Lee J. and Ji E. (2010).
DETECTION OF EXIT NUMBER FOR THE BLIND AT THE SUBWAY STATION .
In Proceedings of the International Conference on Computer Vision Theory and Applications, pages 543-546
DOI: 10.5220/0002892505430546
Copyright
c
SciTePress
station. At that space, the lighting condition is stable
and target digit(exit number) sizes are predictable
because that sign board size are uniformed by
public subway company. From these assumptions,
our system passes through 2 steps as Figure 1. The
first step has filtering, adaptive binarization,
connected component detection and decision of
candidate of number region. The second step has
OCR verification and selects the one number.
Input images
Exit number
Figure 1: Processing steps of the proposed blind guidance
system
.
Section 2 describes system design. In section 3, we
will deal with image resolution firstly. And we will
propose a robust and efficient Exit number locating
method which is independent of the size of Exit
number. Section 4 shows experimental results.
Finally Section 5 talks about the conclusion.
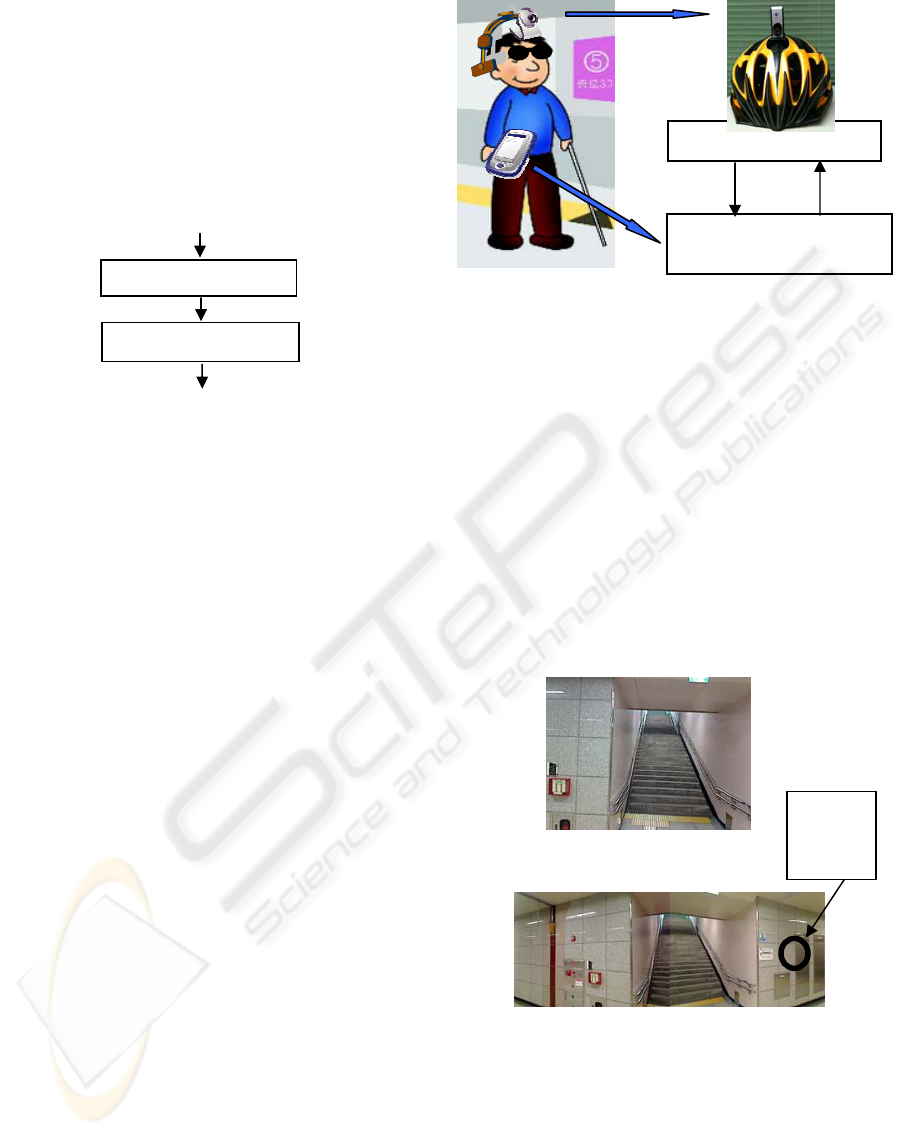
2 SYSTEM DESIGN
Figure 1 shows the general configuration of our
proposed system. The building elements are the
PDA(or notebook), the USB-camera and the voice
synthesizer.
Locating digit detection algorithm involves
scenarios. In the 'pause mode', the camera which is
placed on the user's head didn’t acquires an image of
the scene when blind person walk to straight way.
The blind met at crossing section following the
guide block, the blind can push the bottom to change
‘active mode’ or automatically change to the ‘active
mode’ when the blind move his body to each bridge
direction that can be detected by sensors.
In ‘active mode’, input images are captured and
the search for digit areas is performed using
proposed methods. These characters are recognized
and read out to the blind person via a voice
synthesizer. Figure 2 shows the system configuration.
Figure 2: System configuration.
3 EXIT NUMBER DETECTION
ALGORITHM
3.1 Image Capture
Our system captures colour images at high
resolution(1280x480) by horizontally synchronized
two USB cameras to make an as much as human
view angle even through we have distortion in the
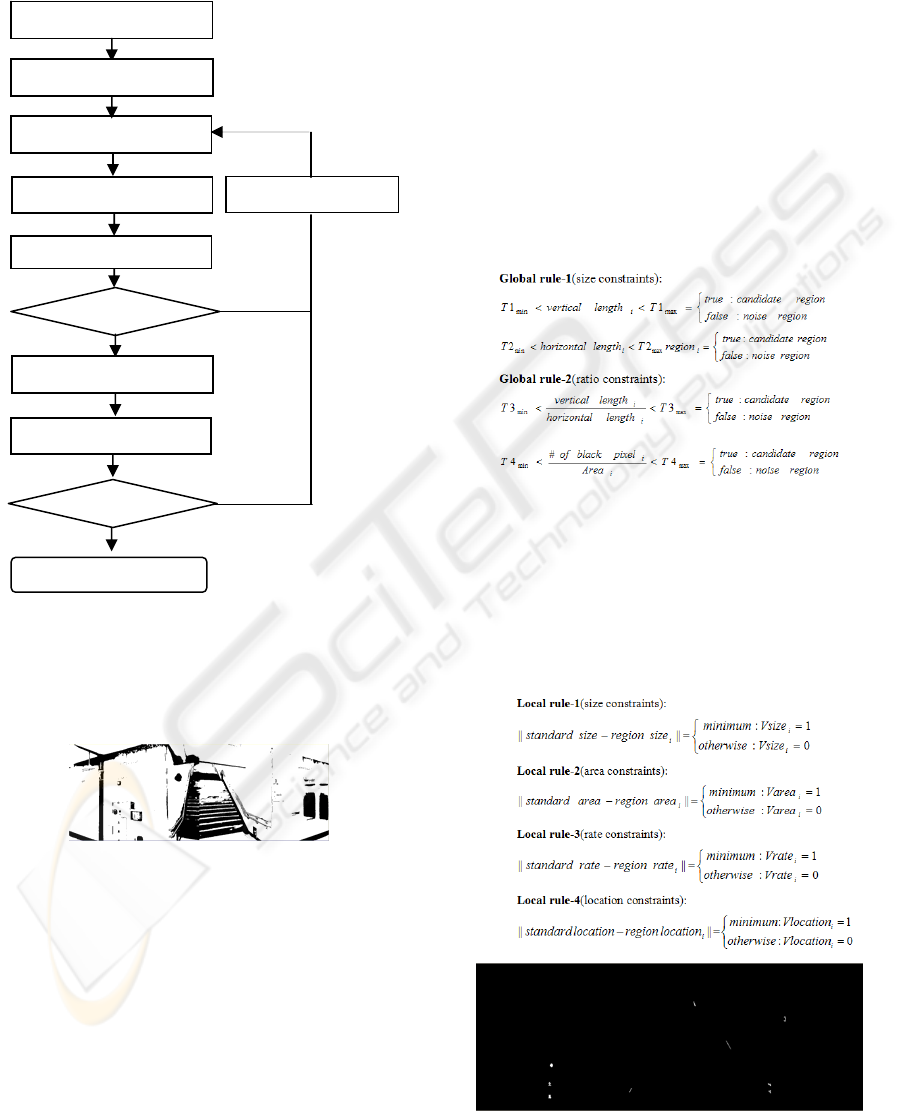
middle area. Figure 3 explain the reason why need
the synchronized 2 USB cameras. Figure 3(a) was
captured by one camera that didn’t include the exit
number area.
(a) One camera image.
(b) Horizontally synchronized two camera image.
Figure 3: Input camera system.
For the processing speed, the image is firstly
processed for converting to the low resolution
(640x240) to identify candidate number location and
then will be recover to the high-resolution
(1280x480) to the OCR stage.
P
re-
p
rocess
i
ng
Pos
t
-
p
rocessing
Image Capture
- Processing
- Voice synthesizer
Target
Exit
digit
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
544
3.2 Pre-processing
Our exit number localization algorithm consists of
several stages as outlined in figure 4.
Figure 4: System flow chart for the Exit number
recognition algorithm.
3.2.1 Adaptive Threshold
Figure 5: The binarization result using adaptive threshold.
The threshold is a very critical parameter for object
detection, thus, a main problem
is how to determine the
optimal threshold. Basically, there
are two forms of the
methods that can set the threshold. One is to preset the
threshold by experimental
results; the other is to set the
threshold automatically based on the input image data.
We used the adaptive threshold method as same as
OpenCV libary(OpenCV, 2006).
3.2.2 CCA (Connected Component Analysis)
Next stage is a connected component analysis
procedure to make isolated regions information. We
used general 2-pass labelling algorithm. The output
results of labelling algorithm are location, size,
several rates from each isolated regions.
3.2.3 Heuristic Verification
From the CCA steps, there are a lot of isolated
regions. To search correct digit region, we used two
verification methods as global and local approaches.
The global verification approach has four noise
deletion rules using priori knowledge about
experimental results of correct digit information.
The local verification approach has four noise
deleting rules using priori knowledge about current
constraints.
The local verification approach has similarity
measuring rules using priori knowledge as same as
global rules. If ith region’s digit score is higher, ith
region will be high probability that is correct digit
region.
Figure 6: The CCA and heuristic verification result.
In
p
ut ima
g
e
Ada
p
tive Threshold
CCA
(
labellin
g
)
OK?
N
OCR
ver
ifi
cat
i
on
OK?
N
Y
Y
Hurisitic verification
Chan
g
e
t
hreshold
D
i
g
i
t recogn
i
t
i
on
Resolution reduction
Resolution extension
DETECTION OF EXIT NUMBER FOR THE BLIND AT THE SUBWAY STATION
545

3.3 Post-processing
From the previous steps, 3 ~ 10 candidates regions
are remained. To decide correct digit regions, we
tried to OCR verification
3.3.1 OCR Verification
Our OCR (Optical character Recognition) system
based on the (Kye Kyung Kim, 2002) that consist of
MLP(multi layer perception) with 198 input neurons,
100 hidden neurons and 10 output neurons. All
candidates regions will be recognized by this MLP,
and selected one or two regions to correct digits.
4 EXPERIMENTAL RESULTS
Our experiment environment consist of Intel
Pentium 2G-Hz, 1G Ram Notebook, Visual C++6.0
under the Windows XP OS. From the system
configuration in figure 2, we captured and tested a
lot of video scenes. We can get the high Exit digit
recognition rate over 90%.
5 CONCLUSIONS
This paper presents an approach for detecting the
Exit number to enhance the safety and mobility of
blind people while walking around subway station.
An image-based technique has been developed to
detect the isolated number pattern at the crossing
roads. The presences of exit numbers are inferred by
careful analysis of numeral width, height, rate,
number of numerals, as well as bandwidth trend. If
we have several candidates of numerals, we adapt to
the OCR function. It was found that the proposed
technique performed with good accuracy. Future
work will focus on new methods for extracting and
all kinds of text characters with higher accuracy and
on the development of a full demonstration system.
ACKNOWLEDGEMENTS
This research was supported by the Conversing
Research Center Program through the National
Research Foundation of Korea(NRF) funded by the
Ministry of Education, Science and Technology
(2009-0082293).
REFERENCES
Andreas Hub, Tim Hartter, Thomas Ertl, “Interactive
Tracking of Movable Objects for the Blind on the
Basis of Environment Models and Perception-Oriented
Object Recognition Methods”, 2006 .
A. Zandifar, R. Duraiswami, A. Chahine, and L. Davis, “A
Video Based Interface to Textual Information for the
Visually Impaired”, IEEE 4th ICMI, 2002, pp.325-330.
B. Thylefors, A. D. Negrel, R. Pararajasegaram, and K. Y.
Dadzie, “Global data on blindness,” Bull. WHO, vol.
73, no. 1, pp. 115–121, Jan. 1995.
“Blindness and visual disability: Seeing ahead projections
into the next century,” WHO Fact Sheet No. 146, 1997.
C. A. Shingledecker and E. Foulke, “A human factor
approach to the assessment of mobility of blind
pedestrians,” Hum. Factor, vol. 20, no. 3, pp. 273–286,
Jun. 1978.
Hub, A., Diepstraten, J., Ertl, T. “Design and
Development of an Indoor Navigation and Object
Identification System for the Blind”. Proceedings of
the ACM SIGACCESS conference on Computers and
accessibility, Atlanta, GA, USA, Designing for
accessibility, 147-152, 2004.
K. Matsuo, K.Ueda and M.Umeda, “Extraction of
Character String from Scene Image by Binarizing
Local Target Area”, T-IEE Japan, Vol. 122-C(2), 2002,
pp.232-241.
Kye Kyung Kim; Yun Koo Chung; Suen, C.Y, “Post-
processing scheme for improving recognition
performance of touching handwritten numeral
strings,” 16th International Conference on Pattern
Recognition, Volume 3, 2002 Page(s):327 – 330
L. Gu, N. Tanaka, T. Kaneko and R.M. Haralick, “The
Extraction of Characters from Cover Images Using
Mathematical Morphology”, IEICE Japan, D-II, Vol.
J80, No.10, 1997, pp. 2696-2704.
“OpenCV 1.0, Open Source Computer Vision Library,”
http://www.intel.com/technology/ computing/opencv/,
2006
R. H. Whitestock, L. Frank, and R. Haneline, “Dog
guides,” in Foundations of Orientation and Mobility,
B. B. Blasch and W. R. Weiner, Eds. New York:
Amer. Foundation for the Blind, 1997.
T. Yamaguchi, Y. Nakano, M. Maruyama, H. Miyao and
T.Hananoi, “Digit Classification on Signboards for
Telephone Number Recognition”, Proc.of the ICDAR,
2003, pp.359-363.
Y. Liu, T. Yamamura, N. Ohnishi and N. Sugie,
“Extraction of Character String Regions from a Scene
Image”, IEICE Japan, D-II, Vol. J81, No.4, 1998,
pp.641-650.
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
546
