ABSTRACTION FROM COLLABORATION BETWEEN AGENTS
USING ASYNCHRONOUS MESSAGE-PASSING
Bent Bruun Kristensen
Maersk Mc-Kinney Moller Institute, University of Southern Denmark, Campusvej 55, DK-5230, Odense M, Denmark
Keywords: Abstraction, Associative Modeling and Programming, Asynchronous Message-passing, Collaborating
Agents.
Abstract: Collaboration between agents using asynchronous message-passing is typically described in centric form
distributed among the agents. An alternative associative form also by means of message-passing is shared
between agents: This abstraction from collaboration is a descriptive unit and makes description of
collaboration between agents simple and natural.
1 INTRODUCTION
Agents are autonomous, execute concurrently and
communicate by means of synchronous or
asynchronous message-passing (Scott, 2009). In a
system executing agents at various times coordinate
and typically communicate to exchange data. This
collaboration between the agents can be described
by different approaches. We focus on agents
collaborating by means of asynchronous message-
passing.
U1 A1
A2
U3
U2
U1
A1
A2
U3
U2
U1
A1
A2
U3
U2
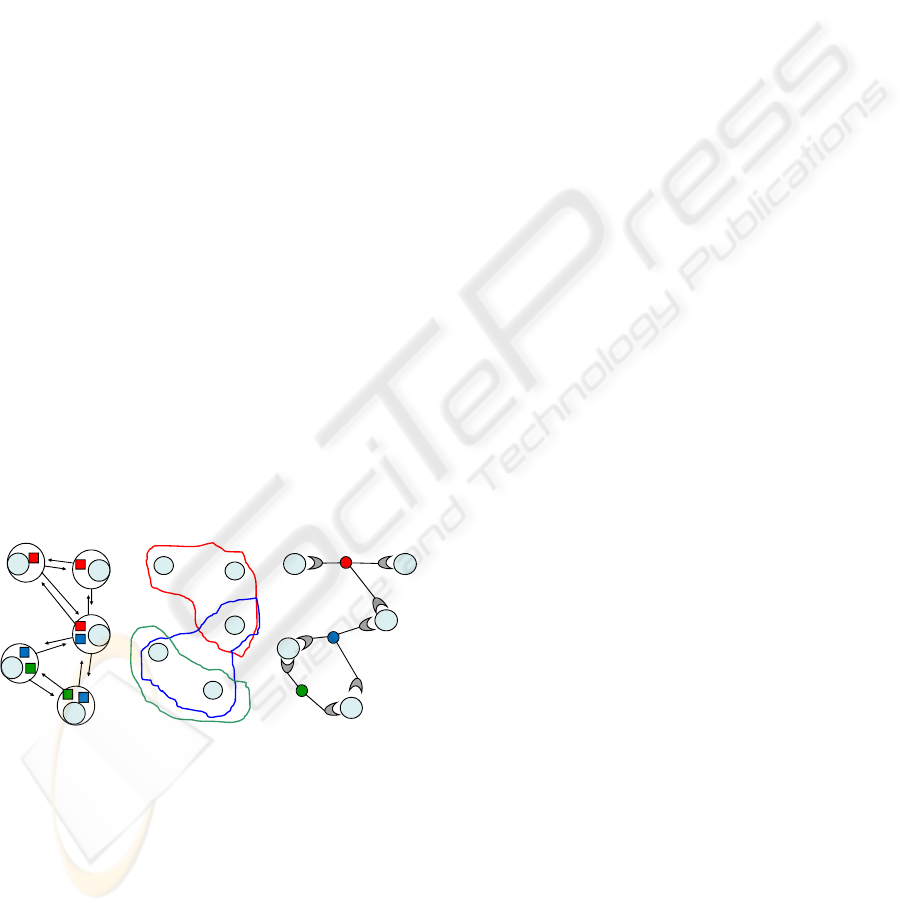
Figure 1: Collaboration: Understanding and Modeling.
The typical form of the message-passing description
is centric in the sense that the message-passing
constructs used to express the collaboration are
placed in the individual code sequences of the
agents. An alternative form of description is
presented, namely to place message-passing
mechanisms in an associative construct outside the
agents and shared by individual agents. The two
forms of description illustrated in Figure 1 (centric
to the left and associative to the right) are
characterized by a classic example, and evaluated.
Associations are abstractions from
collaborations including communication,
coordination and cooperation. The abstraction
supports our understanding (Figure 1 in the middle)
by modeling and programming collaboration as a
unit: “Without abstraction we only know that
everything is different” (Booch, 2007). Associations
and collaborations are seen as concepts and
phenomena and possess properties. Because an
association is a descriptive unit collaboration may
be described by simple clauses.
2 ASYNCHRONOUS
MESSAGE-PASSING
We present concrete mechanisms for associative
collaboration between message-passing agents. The
semantics of the mechanisms is essential, but the
syntax is only for illustrative purpose. Message-
passing is illustrated by
Send(R, x) — message x
is sent to agent
R (similar to “no-wait-send” (Scott,
2009)), and by
Receive(S)→y — a message is
received from agent
S and assigned to y (similar to
“polling without blocking” (Scott, 2009)).
2.1 Centric Form
Centric collaboration in schematic form is
illustrated in Figure 2 where class
Sender has a
86
Bruun Kristensen B. (2010).
ABSTRACTION FROM COLLABORATION BETWEEN AGENTS USING ASYNCHRONOUS MESSAGE-PASSING.
In Proceedings of the 12th International Conference on Enterprise Information Systems - Software Agents and Inter net Computing, pages 86-92
DOI: 10.5220/0002898700860092
Copyright
c
SciTePress

reference
R to an agent of class Receiver, a message
x, and its action part. Similarly class Receiver has a
reference
S to an agent of class Sender, a message y,
and its action part. We assume that agents
SS of
class
Sender and RR of class Receiver exist such
that
SS’s R reference refers to RR and RR´s S
reference refers to
SS: By Send(R, x) agent SS
sends the message
x to agent RR. And by
Receive(S)→y agent RR receives a message from SS
and assigns it in
y. The communication between the
agents
SS and RR is asynchronous, i.e. in the
communication illustrated the message send is not
necessarily the message received.
class Receiver
extends Agent {
Sender S
Message y
…
Receive(S)→y
…
}
class Sender
extends Agent {
Receiver R
Message x
…
Send(R, x)
…
}
Figure 2: Centric: Asynchronous Message-Passing.
2.2 Associative Programming and
Modeling
Object-oriented programming includes centric
descriptions, and collaboration is implicitly
described only and distributed among methods of
autonomous objects. In object-oriented
methodologies alternatives exist typically only for
analysis and design, but not for implementation.
Associative programming and modeling
(Kristensen, 2006) include:
Associations support associative modeling and
programming through abstractions from
collaboration. An association is a descriptive
unit of integrated collaboration and role aspects.
Associations differ from usual classes because
collaboration is between autonomous entities.
The directive of an association (sequencing rules
for interactions among the autonomous entities)
is a central description related to the
participating entities. The interactions are
processed sequentially.
An entity is autonomous: Only the entity itself
may execute its methods. Action parts of entities
(action sequence to be executed) execute
concurrently.
An entity executes its contributions (i.e. a
method invoked by the entity) to the
collaboration in the context of the entity. An
entity participating in various associations
executes contributions from the directives
interleaved.
Pi
Xj
Rj
Xk
Rk
association Xj [
role Rj for Pi {…}
…
directive
{… Rj::ni(…) …}
…
]
association Xk [
role Rk for Pi {…}
…
directive
{… Rk::ni’(…) …}
…
]
class Pi {
method mi(…) {…}
method ni(…) {…}
method ni’(…) {…}
…
action_part
{… mi(…) …}
}
Figure 3: Associative Modeling and Programming.
Interleaved execution is illustrated in Figure 3:
Associations
Xj and Xk have roles for Pi named Rj
and Rk and directives including Rj::ni(…) and
Rk::ni’(…), respectively. Class Pi has methods ni,
ni’ and mi, as well as an action part including an
invocation of
mi. Assume (among others) that entity
eP of Pi is engaged as roles Xj and Xk in instances
of associations
Xj and Xk. Assume that to eP is
about to execute
mi(…) and through the as roles Xj
and
Xk about to contribute with Rj::ni(…) and
Rk::ni’(…), respectively. Then interleaved
execution for
eP in this schematic situation means,
that exactly one out of
mi(), ni(…) and ni’(…), is
selected randomly and executed by
eP. These
actions except for the one selected remain ready to
execute (possibly with additional actions form other
associations) after the execution of the selected
method for the following selection and execution by
eP.
2.3 Associative Form
Here associations are between agents and enhanced
by message-passing language constructs, but for
simplicity reasons roles are not included as an
integral part of associations. In message-passing
associations the agents participating in associations
are executing according to the above general
description of associations. Associative
collaboration is illustrated in Figure 4 where
Association between Sender and Receiver
describes a schematic collaboration between R and
S. S sends the message available as x to agent R by
S::Send(R, x), and R receives a message from S to
be stored in
y by R::(Receive(S)→y). The
ABSTRACTION FROM COLLABORATION BETWEEN AGENTS USING ASYNCHRONOUS MESSAGE-PASSING
87
communication between the agents is asynchronous,
i.e. in the communication illustrated the message
send is not necessarily the message received.
class Sender
extends Agent {
Message x
…
}
class Receiver
extends Agent {
Message y
…
}
association Association
[
Receiver R
Sender S
…
S::Send(R, x)
…
R::(Receive(S)→y)
…
]
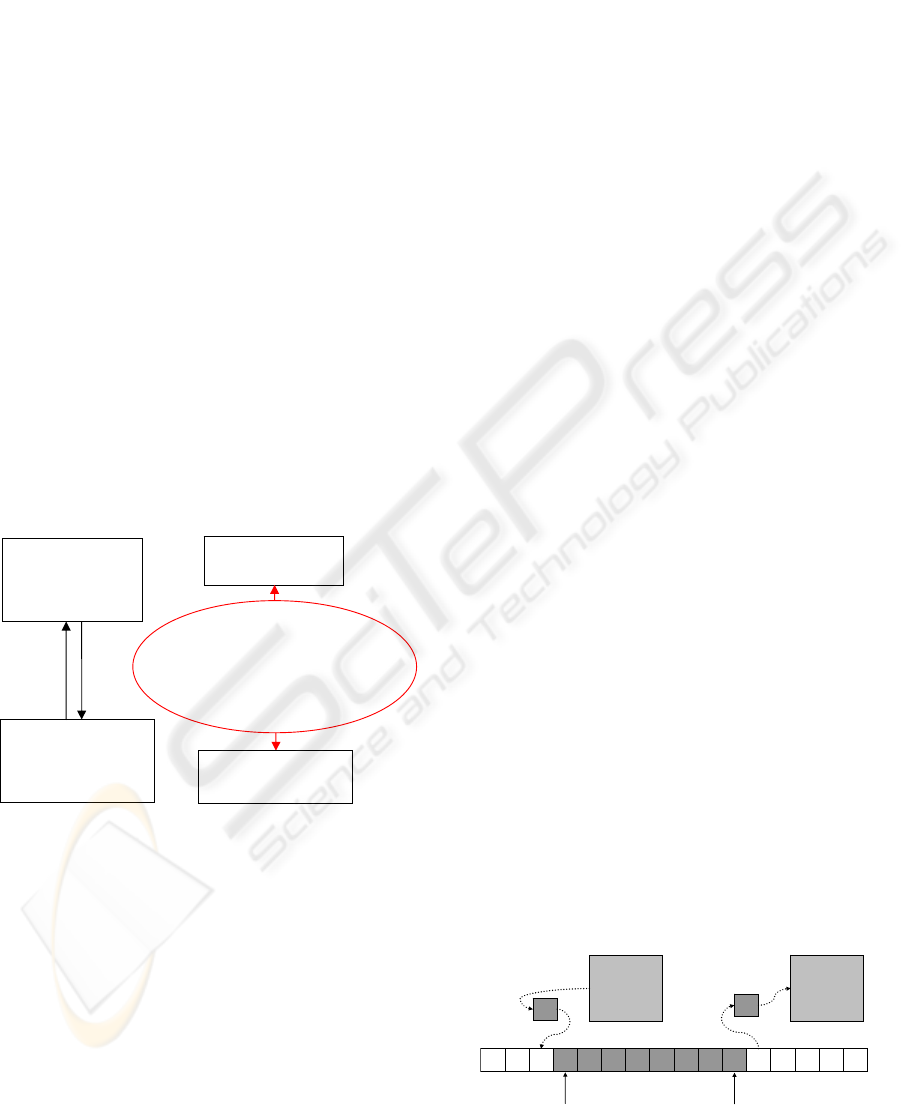
Figure 4: Associative: Asynchronous Message-Passing.
Centric and associative collaboration between
agents by means of asynchronous message-passing
are illustrated in Figure 5. In the centric description
(to the left) the interaction constructs are separated
and specified in the action parts of the participating
agents. Boxes represent agents taking part in
execution and arrows represent agent references. In
the associative description (to the right)
communication is specified in the association on
behalf of the agents. Boxes represent agents
participating in associations and the oval with
arrows represents an association, where the agents
execute their contributions interleaved.
class Sender … {
…
Send(R, x)
…
}
class Sender … {
…
}
association Association [
…
S::Send(R, x)
…
R::(Receive(S)→y)
…
]
class Receiver … {
…
Receive(S)→y
…
}
class Receiver … {
…
}
Figure 5: Collaboration: Centric and Associative.
2.4 Additional Coordination
The coordination of collaboration between Sender
and
Receiver does not ensure that the message
send is the message received when
S sends the
message
x to agent R by Send(R, x), and R receives
a message in
y from S by Receive(S)→y: The
message
x may not be received or it is the first (not
used so far) message received from
S. To remedy
this we include the method
AwaitMessage(…)illustrated in Figure 6: All
messages received are accumulated until a message
from agent A has been received. The message may
be received before or after
AwaitMessage(…) is
invoked, because a queue of received messages is
maintained for each agent. The method
Receive()
is used to retrieve the next message received to
illustrate the situation where the agent is responsible
for retrieving its messages (
Receive() is without
parameters but else similar to
Receive(…) with an
agent as parameter). If no messages are available at
a given time
waitAwhile()makes the execution
wait for a while (instead of e.g. introducing
“blocking” and agent scheduling model).
… Message AwaitMessage(Agent a) {
while (!getMessageSent(a)) {
m = Receive();
if (!m==null) putMessageSent(m
)
else waitAwhile();
}
return clearMessageSent(a);
}
… class MessageList {
… Boolean getMessageSent(Agent a) {…}
… void putMessageSent(Message m) {…}
… Message clearMessageSent(Agent a) {…}
…
}
Figure 6: AwaitMessage(…)and MessageList.
MessageList accumulates messages received by an
agent and maintains a queue of received messages
from each sending agent. The methods include
Boolean getMessageSent(Agent a): Check if a
message with sender
a is received, i.e. the queue for
agent
a is not empty; putMessageSent(Message
m)
: accumulate message m, i.e. add message to the
queue;
Message clearMessageSent(Agent a):
Remove message with sender
a from accumulated
messages, i.e. remove message from the queue. By
AwaitMessage(S) we are sure that a message has
been received from
S, and that the first message
received from
S is returned.
3 BOUNDED BUFFER EXAMPLE
We describe the Bounded Buffer example by
collaborating message-passing agents in centric and
associative form.
Producer
Consumer
Bounded Buffer
Last First
Figure 7: Illustration: Bounded Buffer Problem.
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
88

The Bounded Buffer problem is illustrated in Figure
7 where
Producer produces artifacts and Consumer
consumes artifacts
—concurrently, but production
times and consumption times are not related:
Producer delivers each artifact produced to
Bounded_Buffer and Consumer retrieves each
artifact for consumption from
Bounded_Buffer.
Producer and Bounded_Buffer are coordinated
during the transfer of an artifact—similarly for
Consumer and Bounded_Buffer.
Bounded_Buffer is bounded, i.e. a maximum
number of elements may be kept in the buffer. If
Bounded_Buffer is full no more elements may
be added to the buffer and
Producer has to wait
for
Bounded_Buffer not to be full. If
Bounded_Buffer is empty no elements can be
retrieved from the buffer and
Consumer has to
wait for
Bounded_Buffer not to be empty.
3.1 Centric Version
class Bounded_Buffer … {
Producer P
Consumer C
data Buffer …
Message x, y
method Empty() {…}
method Full() {…}
method Put(…) {…}
method Get(…) {…}
…
(|(loop
wait(Full())
x→Put()
Send(P)
AwaitMessage(P)→x
loop)
,
(loop
wait(Empty())
Get()→y
AwaitMessage(C)
Send(C, y)
loop)
|)
…
}
class Producer
extends Agent {
Bounded_Buffer BB
Message x
method Produce(…) {…}
…
(loop
Produce()→x
AwaitMessage(BB)
Send(BB, x)
loop)
…
}
class Consumer
extends Agent {
Bounded_Buffer BB
Message y
method Consume(…) {…}
…
(loop
Send(BB)
AwaitMessage(B)→y
y→Consume()
loop)
…
}
Figure 8: Bounded Buffer: Centric Version.
The centric solution is illustrated in Figure 8 where
Producer, Consumer and Bounded_Buffer are
agents each describing their individual action parts:
Producer continuously produces and delivers an
artifact to
Bounded_Buffer and Consumer
continuously receives an artifact from
Bounded_Buffer and consumes it.
Bounded_Buffer continuously either accepts or
delivers an artifact given that the buffer is not
full or empty, respectively.
In
Bounded_Buffer the construction (| … , …
|)
means concurrent execution of the two parts.
Collaboration is described by the
acknowledgement transfer (i.e. a message with
no additional contents is communicated) in
Send(P) in Bounded_Buffer and
AwaitMessage(BB)
in Producer succeeded by
the message transfer of
x in Send(BB, x) in
Producer and AwaitMessage(P)→x in
Bounded_Buffer.
Similarly by the acknowledgement transfer in
Send(BB) in Consumer and AwaitMessage(C) in
Bounded_Buffer succeeded by the message
transfer of
y in Send(C, y) in Bounded_Buffer
and AwaitMessage(B)→y in Consumer.
Throughout the examples
wait(…) means that
the agent executing
… waits until the result of
this execution becomes false.
3.2 Associative Version
class Producer … {
method Produce(…) {…}
…
}
class Consumer … {
method Consume(…) {…}
…
}
class Bounded_Buffer … {
data Buffer …
method Empty() {…}
method Full() {…}
method Put(…) {…}
method Get(…) {…}
…
}
association ProducerBuffer
Producer P
Bounded_Buffer BB
Message x
(loop
wait(BB::Full())
x→BB::Put()
P::Produce()→x
P::Send(BB, x)
BB::AwaitMessage(P)→x
loop)
]
association ConsumerBuffer
Consumer C
Bounded_Buffer BB
Message x
(loop
wait(BB::Empty())
BB::Get()→x
BB::Send(C, x)
C::AwaitMessage(BB)→x
x→C::Consume()
loop)
]
Figure 9: Bounded Buffer: Associative Version.
The solution is illustrated in Figure 9 including
agents
Producer, Consumer, and Bounded_Buffer:
ProducerBuffer and ConsumerBuffer are
associations between
Producer and
Bounded_Buffer agents and Consumer and
Bounded_Buffer agents, respectively. Producer
and Bounded_Buffer have no action part but
contribute to
ProducerBuffer by executing
Produce and Full/Put, respectively—similarly
for
Consumer, Bounded_Buffer,
ConsumerBuffer, Consume and Empty/Get.
ProducerBuffer describes the action cycle:
Bounded_Buffer waits if full, Bounded_Buffer
stores x as next message, Producer produces the
contents of a message in
x, and eventually
transfers
x from Producer to Bounded_Buffer by
ABSTRACTION FROM COLLABORATION BETWEEN AGENTS USING ASYNCHRONOUS MESSAGE-PASSING
89
P::Send(BB, x) succeeded by
BB::AwaitMessage(P)→x
.
ConsumerBuffer describes the action cycle:
Bounded_Buffer waits if empty,
Bounded_Buffer retrieves next message to x,
transfers
x from Bounded_Buffer to Consumer in
BB::Send(C, x)
succeeded by
C::AwaitMessage(BB)→x
, and eventually
Consumer consumes the contents of the message.
4 EVALUATION
Centric collaboration cf. Figure 10 (left) is
characterized by
Concurrency is described implicitly by
individual agents
producer/consumer and
explicitly in
bounded_buffer.
Collaboration is described by several
Send(…)
and AwaitMessage(…) at different points and
with different purposes in the action sequences
of the individual agents. For example the
collaboration between
Producer and
Bounded_Buffer is initiated by the
acknowledgement transfer in
Send(P) and
AwaitMessage(BB)
and only when this is
established the actual message transfer takes
place by
Send(BB, x) and AwaitMessage(P)→x.
… Producer …
… Bounded_Buffer …
… Consumer …
… Producer …
… Bounded_Buffer …
… ProducerBuffer …
… Consumer …
… ConsumerBuffer …
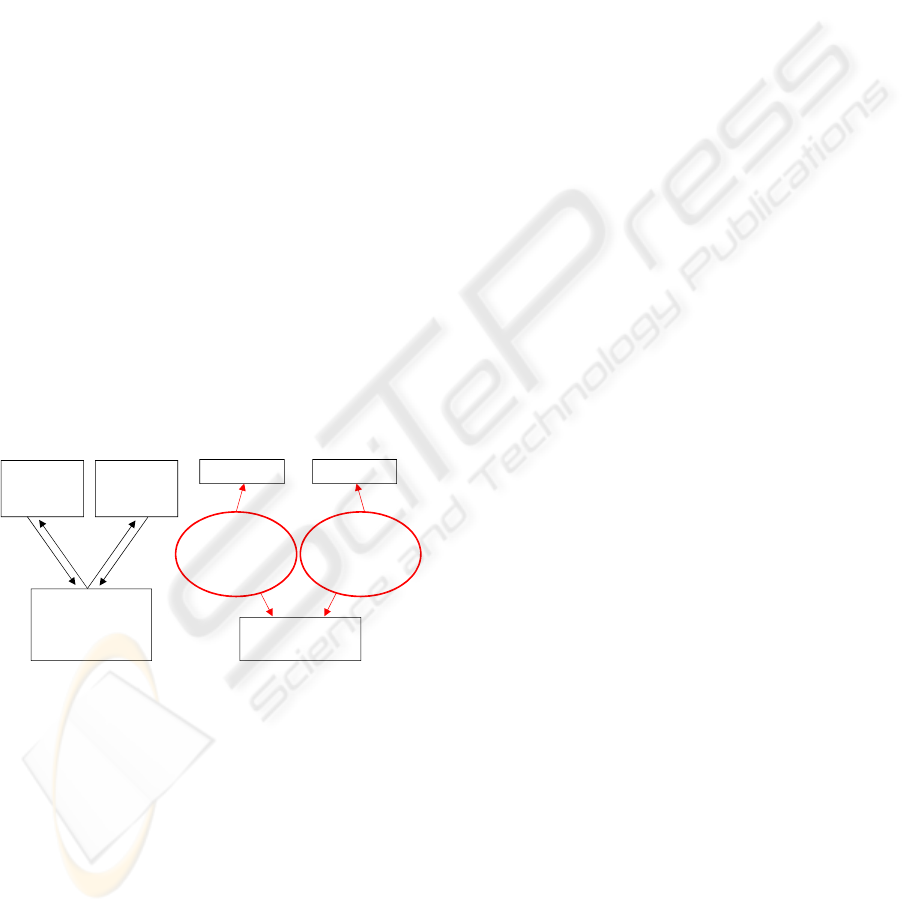
Figure 10: Bounded Buffer: Centric and Associative.
Associative collaboration cf. Figure 10 (right) is
characterized by
Concurrency is described by the different
associations. Still the any contribution is
executed by the respective agent.
Collaboration is described by individual
association units, in
ProducerBuffer mainly by
P::Send(BB, x) followed by
BB::AwaitMessage(P)→x and in
ConsumerBuffer mainly by BB::Send(C, x)
followed by
C::AwaitMessage(BB)→x. No
additional sending and receiving to prepare for
the actual sending and receiving a message is
needed.
Sequencing of contributions from the agents is
described by concatenation of clauses in the
directive of the association, i.e. in
ProducerBuffer the clause P::Send(BB, x) is
followed by
BB::AwaitMessage(P)→x and in
ConsumerBuffer the clause BB::Send(C, x) is
followed by
C::AwaitMessage(BB)→x.
The associative form is superior to the centric form
with respect to modeling and programming
collaboration because this form supports our natural
understanding of collaborations between agents (in
terms of
ProducerBuffer and ConsumerBuffer) and
because the abstraction captures collaboration as
these descriptive units. The abstractions described
are formed by our conceptualization of the system
and are essential for understanding, modeling and
communication (Booch, 2007). Alternatively, if the
focus is on the behavior of the individual agents
then the centric form may be preferred because the
entire action part may be described as a unit.
In the descriptions the various elements of
coordination appears differently in associative and
centric forms. In the centric form concurrency
appears natural by means of the action parts of the
agents, whereas message-passing preparation and
sending must be described explicitly by additional
clauses. In the associative form coordination and
message-passing appears natural whereas
concurrency is naturally described by the
association abstractions. Hence the associative
approach is more simple, understandable and
flexible than the centric approach.
4.1 Conceptualization versus
Implementation
Associations based on asynchronous message-
passing support our way of understanding
collaboration between agents through abstraction,
and the association functions as a natural language
mechanism for describing systems. In addition by
the association the agents collaborating have no
references to each other (pointers/references
considered harmful), i.e. they only know each other
indirectly through the association. But because
abstractions are descriptive units they appear as
central descriptions. A system description is
typically formed by a number of such abstractions,
and these abstractions may be related through
composition and specialization: The association is a
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
90
language aspect capturing our conceptualization of
collaboration in a system.
Still associations are language mechanisms and
not implementation specific technology.
Associations may be implemented as central units
similar but not identical to agents, but the actions of
the directives are executed by the contributing
agents. However the distribution of these
contributions and sequencing of the directive itself
may be maintained by such an implementation unit.
The association controls its directive but the agents
execute their contributions. Alternatively this
control may be distributed among the agents. In
order to support certain desirable conditions this
implementation approach becomes decentralized.
An association is then a shared plan with a current
point of control. This plan is distributed to the next
agent to contribute according to the plan. When an
agent has completed its contribution, the agent is
responsible for maintaining the plan and forwarding
the plan further. The association is passive because
the agents process the directive as a plan: The
contributions from participating agents to the
association are distributed to the agents for which
to-do lists of actions are maintained and processed.
No matter if the association is implemented
centralized or decentralized the idea of the
association as a shared plan for collaboration makes
it possible for agents precisely and understandably
to explain their ongoing actions. The association
works as a shared plan explaining not only what is
going on but also why and in which context.
4.2 Experiment
The Bounded Buffer experiment is inspired from a
project about transportation systems (FLIP) (Jensen,
et al., 2005). The FLIP project investigated the
process of moving boxes from a conveyor belt onto
pallets and transporting these pallets. This process
exists in the high bay area of the LEGO® factory
with AGVs, no human intervention and only
centralized control. A toy prototype inspired from
this system (to bridge the gap between simulation
and real physical applications) measured 1.5 by 2m,
with three mobile robots (LEGOBots), two input
stations, two output stations, one conveyor belt, and
one station with empty pallets. The approach
supported a fully distributed control for each
LEGOBot. A LEGOBot was based on a LEGO®
MindstormsTM RCX brick extended with a PDA
and wireless LAN. The enormous problems with
combining and maintaining the basic technology
(including LEGO® MindstormsTM, RCX, PDA,
WLAN) motivated the introduction of a virtual
platform.
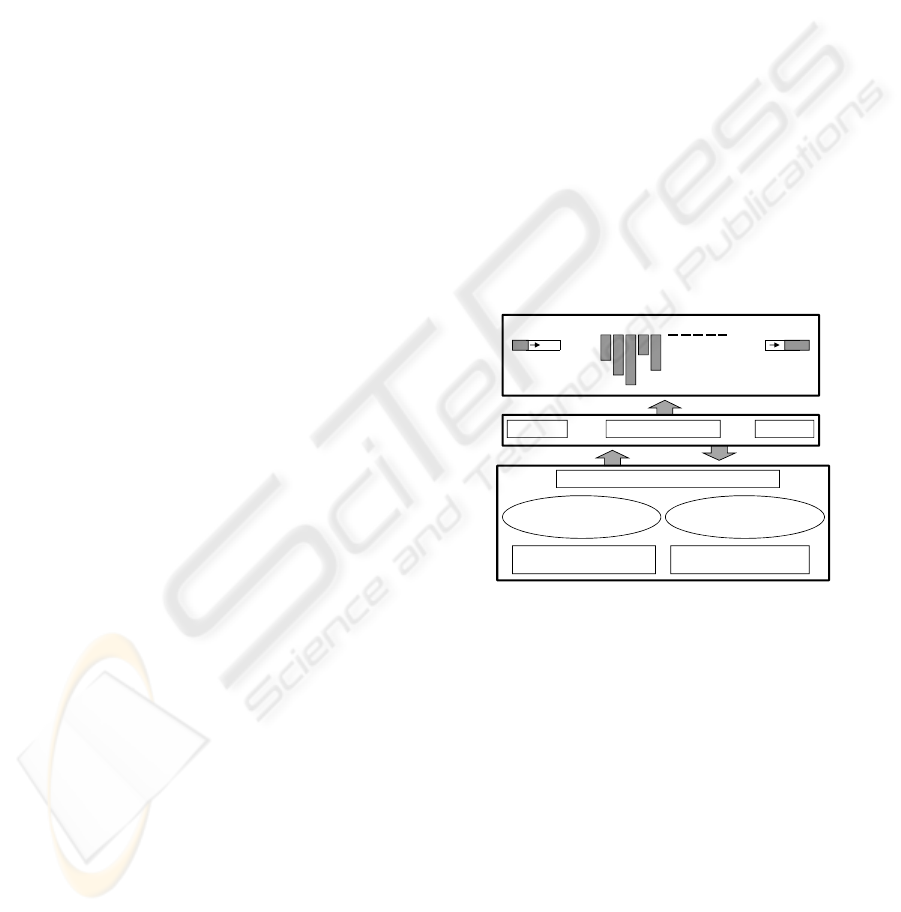
The Bounded Buffer experiment is based on a
similar virtual platform illustrated in Figure 11. The
experiments have several objectives including how
to describe collaborations for classic problems like
the Bounded Buffer example and how to implement
the association abstraction, especially asynchronous
message-passing. In Figure 11 the top part is a
visualization of the Bounded Buffer example:
Producer and Consumer are illustrated by
respectively increasing and decreasing bars and
Bounded Buffer is a queue of bars. The bottom part
is the logical control illustrated in Figure 9. The
logical control is an application framework in
JAVA supporting
Association and Agent as
abstract classes. The simulator in the middle part
consists of concurrently executing objects and is
dynamically visualized. The objects of the logical
model initiate and await the actual behavior in the
simulator. The functionality of the simulator
includes randomness etc. in order to expose relevant
properties of a real physical system.
Bounded BufferProducer Consumer
class Producer
extends Agent {…}
class Consumer
extends Agent {…}
Producer
class Bounded Buffer extends Agent {…}
ConsumerBounded Buffer
class ProducerBuffer
extends Association {…}
class ConsumerBuffer
extends Association {…}
Figure 11: Experimental platform.
5 BACKGROUND
The specific characteristics are similar to
synchronous and asynchronous message-passing in
(Scott, 2009) whereas the basic agent and multi
agent concepts are inspired from (Jennings &
Wooldridge, 2000). The Java Agent Development
Framework (JADE) (Bellifemine, et al., 2008)
includes operations
send(…) and receive(…).
Figure 12 illustrates these operations together with
the operation
createReply(…) that creates a new
message
msgTx as a reply to the message received,
i.e.
msgRx. In (Visual Studio, 2010) similar
message-passing operations with varying
synchronous and asynchronous aspects include
ABSTRACTION FROM COLLABORATION BETWEEN AGENTS USING ASYNCHRONOUS MESSAGE-PASSING
91

send(…), asend(…), receive(…) and
try_receive(…)
.
ACLMessage msgRx = receive();
if (msgRx != null) {
System.out.println(msgRx);
ACLMessage msgTx = msgRx.createReply();
msgTx.setContent("Hello!");
send(msgTx);
} else {
block();
}
Figure 12: JADE Extract.
The association is a first class concept in modeling
and programming notation (Kristensen, 2006).
Various approaches to notation for non centric
modeling and programming include: Relations
(Rumbaugh, 1987) and associations in OMT
(Rumbaugh, et al., 1991) are object-external
abstractions but only for structural aspects.
Sequence and collaboration diagrams in UML
(Booch, et al., 1998) support the description of
object interaction by means of method invocation.
Association = Activity + Role (Kristensen, 2006)
combines activities (Kristensen & May, 1996) and
roles (Kristensen, 1995) in one abstraction
supporting both roleification and execution. Design
patterns (Gamma, et al., 1994) capture experience
of object oriented design and programming, but are
only mental abstractions. Patterns for object
collaboration include
DECORATOR, OBSERVER, and
MEDIATOR.
6 CONCLUSIONS
In the centric form of message-passing agents the
focus is on the action sequence of the individual
agent and the description of collaboration between
agents is distributed among these. The associative
abstraction is a descriptive unit and supports our
natural understanding of collaboration as shared
between agents. By means of the directive the
description of collaboration becomes simple and
natural.
Challenges for association based on
asynchronous message-passing include
Broadcast messages could be restricted to
associations, i.e. only to agents participating in
the ongoing collaboration.
The facilities supported by an operation similar
to
createReply(…) could improve the
expressional power of associations.
In (JACK 2010) (agent oriented development
environment and agent oriented extensions to
JAVA) a message is received implicitly by the
agent and an associated plan for handling the
message may be initiated: An association could
be seen as a similar plan for several
collaborating agents.
ACKNOWLEDGEMENTS
We thank Palle Nowack at Alexandra Institute for
inspiration and contribution.
REFERENCES
Bellifemine F. L., Caire G., Greenwood D., 2008.
Developing Multi-Agent Systems with JADE. Wiley.
Booch G., Rumbaugh J., Jacobson I., 1998. The Unified
Modeling Language User Guide. Addison Wesley.
Booch G., 2007. Private communication.
Gamma E., Helm R., Johnson R., Vlissides J., 1994.
Design Patterns: Elements of Reusable Object-
Oriented Software. Addison Wesley.
JACK, 2010. Intelligent Agents — Agent Manual —
Agent Practicals. AOS Group (Autonomous Decision-
Making Software), http://www.agent-software.com.
Jennings N. R., Wooldridge M., 2000. Agent-Oriented
Software Engineering. Proceedings of the 9th
European Workshop on Modelling Autonomous
Agents in a Multi-Agent World: Multi-Agent System
Engineering.
Jensen L. K., Kristensen B. B., Demazeau Y., 2005.
FLIP: Prototyping Multi-Robot Systems. Journal of
Robotics and Autonomous Systems. Vol. 53, pp. 230-
243.
Kristensen B. B., 1995. Object-Oriented Modeling with
Roles. Proceedings of the 2nd International
Conference on Object-Oriented Information Systems.
Kristensen B. B., May D. C-M., 1996. Activities:
Abstractions for Collective Behavior. Proceedings of
the European Conference on Object-Oriented
Programming.
Kristensen B. B., 2006. Associative Programming and
Modeling: Abstractions over Collaboration. 1st
International Conference on Software and Data
Technologies.
Rumbaugh J., 1987. Relations as Semantic Constructs in
an Object-Oriented Language. Proceedings of the
Object-Oriented Systems, Languages and
Applications Conference.
Rumbaugh J., Blaha J. M., Premerlani W., Eddy F.,
Lorensen W., 1991. Object-Oriented Modeling and
Design. Prentice Hall.
Scott M. L., 2009. Programming Language Pragmatics.
Morgan Kaufmann Publishers.
Visual Studio, 2010. Visual C++ (Asynchronous Agents
Library), http://msdn.microsoft.com/en-us/library.
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
92
