
RECOGNIZING USER INTERFACE CONTROL GESTURES FROM
ACCELERATION DATA USING TIME SERIES TEMPLATES
Pekka Siirtola, Perttu Laurinen, Heli Koskim¨aki and Juha R¨oning
Intelligent Systems Group, P.O. BOX 4500, FI-90014, University of Oulu, Finland
Keywords:
Gesture recognition, Accelerometer, Template-based matching.
Abstract:
This study presents a method for recognizing six predefined gestures using data collected with a wrist-worn tri-
axial accelerometer. The aim of the study is to design a gesture recognition-based control system for a simple
user interface. The recognition is done by matching the shapes that user’s movements cause to acceleration
signals to predefined time series templates describing gestures. In this study matching is done by using three
different trajectory distance measures, the results show that the weighted double fold gives the best results. The
superiority of this distance measure was shown using a statistical significance test. A user-dependent version
of the method recognizes gestures with accuracy of 94.3% and a recognition rate of the user-independent
version is 85.5%. This work was supported by the EU 6th Framework Program Project XPRESS.
1 INTRODUCTION AND
RELATED WORK
In some situations gesture recognition is a good op-
tion for handling human-computer interaction be-
cause it enables natural interaction and no input de-
vices, such as a keyboard and a mouse, are needed. In
fact, in recent years gesture recognition systems have
become more widely known among the public as new
products controlled by gestures have become avail-
able. For instance gesture-controlled game consoles
have recently appeared in stores.
This work studies the recognition of six gestures:
punch - pull, pull - punch, left - right, right - left, up -
down and down - up. These gestures were selected for
this study because the future purpose of the gesture
recognition system is to control a simple user inter-
face. The interface view is a table and each cell of the
table is a button. Using gestures, the user can decide
which button to push. All the gestures selected for this
study include two phases, action and counter-action,
because it is natural for a human to return the hand
to the original position after each performed gesture.
Moreover, the gestures of this study were selected so
that they can be performed by moving hand along one
out of three coordinate axis so gestures contain move-
ment mainly in one dimension, though the data is tri-
dimensional. Therefore, for each gesture, two out of
three acceleration channels are considered useless and
are removed in order to improve the recognition rates.
Mainly two different types of methods have been
used to recognize gestures: template-based methods
and HMM methods. However, in (Ko et al., 2008) it
is shown that gestures can be recognized more accu-
rately using templates than by using HMM. Several
template-based gesture recognition systems are pro-
posed in the literature. In (Corradini, 2001) dynamic
time warping (DTW) was used to recognize a small
gesture vocabulary from offline data. The study did
not use body-worn sensors, instead the system was
trained with video sequences of gestures. A recogni-
tion accuracy of 92% was attained when five gestures
such as stopping and waving were recognized.
In (Stiefmeier and Roggen, 2007) gesture signals
were transformed into strings to make similarity cal-
culations faster and real-time. The study used sev-
eral inertial sensors: the sensors were attached to the
lower arms, upper arms and the torso of the body. Hu-
man motion was presented by strings of symbols, and
by combining the data provided by different sensors,
the relative position of the arms with respect to the
torso was computed. The method was demonstrated
by spotting five predefined gestures from a bicycle
maintenance task. An average classification rate of
82.7% was achieved when the method was tested with
three persons.
Methods similar to those in our study were used
in (Ko et al., 2008). The study used two wrist-worn
176
Siirtola P., Laurinen P., Koskimäki H. and Röning J. (2010).
RECOGNIZING USER INTERFACE CONTROL GESTURES FROM ACCELERATION DATA USING TIME SERIES TEMPLATES.
In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pages 176-182
DOI: 10.5220/0002899601760182
Copyright
c
SciTePress
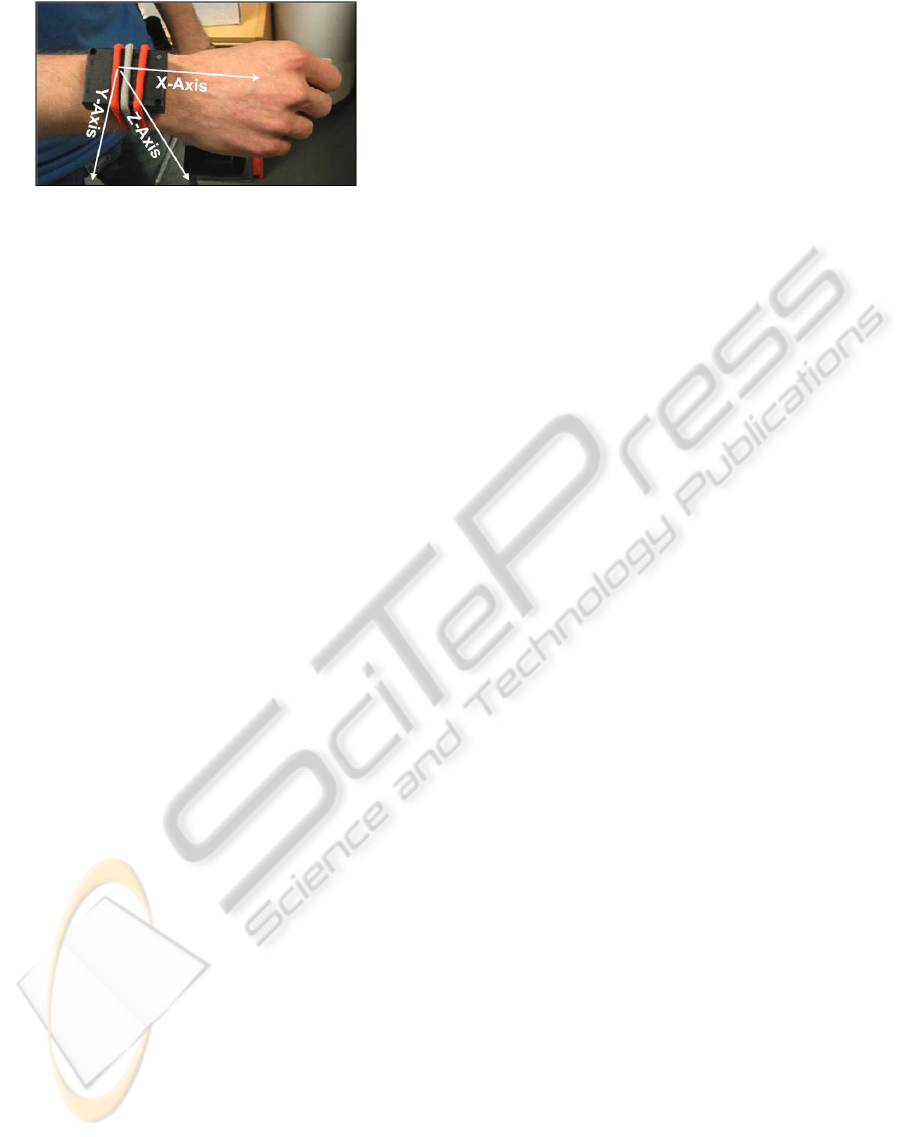
Figure 1: Accelerometer attached to the user’s active wrist.
accelerometers, one on each wrist, and DTW as a dis-
tance measure. The frequency of the accelerometers
was 150 Hz. Because DTW was used, the parameters
for endpoint detection had to be defined by hand or by
using a complex automated way. This made the DTW
approach less generic. To make recognition faster, Ko
et al. transformed the signal into a more compact rep-
resentation by sliding a window of 50 samples with
a 30-sample overlap through the signal. This way
the number of points was reduced, making the system
faster but at the same time making the system less sen-
sitive to fast changes in the signal. Therefore, if fast
movement is an important part of the gesture, this can
cause problems. In the study 12 gestures of a cricket
umpire, performed by four actors, were recognized.
The system was tested using many different settings,
for example offline and online. Each actor performed
each gesture only once, and these data were used for
testing, so the total number of gestures in the test data
was only 48. The accuracy of the system was 93.75%
when recognition was done using one template per
gesture, as was done in our study, also.
The paper is organized as follows: Section 2 de-
scribes sensors and data sets. Section 3 introduces the
techniques and gestures used in this study. Section
4 evaluates the performance and accuracy of the pro-
posed method with the data sets presented in Section
2. Finally, conclusions are discussed in Section 5.
2 DATA SET
The data were collected using a mobile device
equipped with a 3D accelerometer, 3D gyroscope,
3D magnetometer and two proximity sensors. In this
study only accelerometers were used and the mea-
suring device was attached to the active wrist of the
user, see Figure 1. The sampling frequency of the ac-
celerometer was 100Hz.
The data were collected from seven persons. Two
separate gesture data sets were collected from each
person: a training data set that included five repeti-
tions each of six gestures and a test set that included
ten repetitions of each gesture. These data sets were
used to test how well the presented method detects the
performed gestures from continuous data streams.
In addition, a performance data set around 30
minutes long that does not include any gestures was
also collected from each person. This data set in-
cluded other activities such as walking and working.
This data set was used to test the speed and accu-
racy of the gesture recognition method. Accuracy was
tested with this data set by testing how many false
positive results the system found from a signal that
did not include any predefined gestures.
3 METHODS
The purpose of the proposed method is to find pre-
defined gestures from continuous accelerometer data
streams. Basically, the system compares the shapes
of studied signals with the shapes of template patterns
describing gestures the system is trained to recognize.
If the shape of the studied gesture is similar to the
shape of some template, we know which gesture is
performed. The quality of the proposed method de-
pends mostly on four things: the quality of the tem-
plates, the accuracy of the similarity measure, selec-
tion of a proper similarity limit and the goodness of
the sliding method. Of course, pre-processing also
has its own important role.
3.1 Data Pre-processing
The raw acceleration data were pre-processed by first
smoothing and then compressing them.
Smoothing was done using moving average (MA)
filter and same weight were given to each point.This
way the number of disturbances could be reduced and
the signal became smoother and easier to handle.
After the smoothing, the signals were compressed
in order to speed up calculations. The data were com-
pressed so that they contained points of the original
data where the derivative is equal to zero. Neverthe-
less no more than m sequential points were allowed to
be removed from the original data. Therefore, if the
number of points between two sequential derivative
points was r and r > m, r,m ∈ Z
+
then ⌊r/m⌋ points,
located at equidistant intervals, were also included in
the compressed signal, see Figure 2.
3.2 Choosing Time Series Templates
The gestures of the study includes two phases, action
and counter action. The use of gestures consisting
of only one phase seemed to confuse users and the
recognition system, because users tend to move their
RECOGNIZING USER INTERFACE CONTROL GESTURES FROM ACCELERATION DATA USING TIME SERIES
TEMPLATES
177

Figure 2: Template and a compressed version of it.
hand back to its original position. So, if both the ac-
tion and counter-action are predefined as gestures that
the system is trying to recognize, users easily acci-
dentally perform two gestures instead of one. Select-
ing the gestures so that they contain an action and a
counter-action solves this problem.
All six gestures of the study were selected so that
movement is performed along only one out of three
coordinate axis and thus only the data of this accel-
eration channels is needed in recognition, see Figure
3. So, the data given by two other channels is not
important and it can be considered that it mostly con-
sist disturbances, white noise and other non-valid in-
formation and therefore these channels are not used
in recognition. Thereby the gestures and gesture
templates are one-dimensional but the data are tri-
dimensional and therefore templates are only needed
to slid through one acceleration channel. The sensor
was attached to the wrist so that the templates of the
gestures punch - pull and pull - punch are slid through
the x-axis accelerometer data, because these gestures
cause mainly x-axis movement, see Figure 1. Corre-
spondingly, left - right and right - left are slid through
the y-axis data and up - down and down - up through
the z-axis data. Elimination of two acceleration chan-
nels makes gesture recognition not only more accu-
rate but also faster, because similarity calculation is
faster from the one-dimensional acceleration signal
than from the tri-dimensional signal.
3.2.1 User-dependent Case
In the user-dependent case, a class template, which is
a template that is used to recognize a certain gesture,
was selected for each gesture using a training data
set. The class templates for each gesture were labeled
from the training data set and they were used as train-
ing templates. Among these training templates, one at
a time was selected as a candidate class template and
used to recognize other training templates. As a class
template describing gesture A was selected candidate
class template P
A,i
which minimizes the sum
n
∑
j=1
d(P
A,i
,P
A, j
), (1)
when 1 ≤ i ≤ n and n is the total number of training
templates of class A, P
A, j
is a training template of ges-
ture A and d(·,◦) is some similarity measure.
3.2.2 User-independent Case
A user-independent version of the presented gesture
recognition system was tested using gesture templates
selected in three different ways. The first two were
suggested by (Ko et al., 2008).
Minimum Selection. In the case of minimum se-
lection a class template describing gesture A was se-
lected using Equation 1. In the user-dependent case
the training and test data sets were performed by the
same person, but in the user-independent case Equa-
tion 1 was applied to the training template set ex-
tracted from six persons. One person was left out as a
test person.
Average Selection. Average selection was also done
using Equation 1. Now the data of six persons were
also used for training and the data of one person were
left out for testing. Equation 1 was performed sepa-
rately for each of the six training data sets to find six
templates that have minimum inter-class distances,
and the resultant six class templates were combined
as one average template using the method presented
in (Gupta et al., 1996). The method was used, though
in (Niennattrakul and Ratanamahatana, 2007) it is
claimed that the method does not produce the real av-
erage of two templates. Still, this DTW-based method
works really well, giving a good estimation of the av-
erage template of two templates, and no better aver-
aging methods seem to be available.
Evolutionary Selection. Evolutionary selection of
a class template was done using a slightly modified
version of the algorithm presented in (Siirtola et al.,
2009). This evolutionary algorithm produces an op-
timal template describing some periodic time series.
In this case the training data sets of six persons were
fused so that the training gestures of each gesture A
were combined as a periodic time series. This time
series was given as an input to the algorithm presented
in (Siirtola et al., 2009), and using it an optimal tem-
plate describing the periods was found. The purpose
of the algorithm is to find a template P that maximizes
the fitness function
f(P) =
Number of found gestures using P
Correct number of gestures
. (2)
Template P which maximizes this function was se-
lected as the class template.
3.3 Sliding and Decision Making
The purpose of sliding is to find every shape of time
series T that is similar to class template P. In the case
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
178
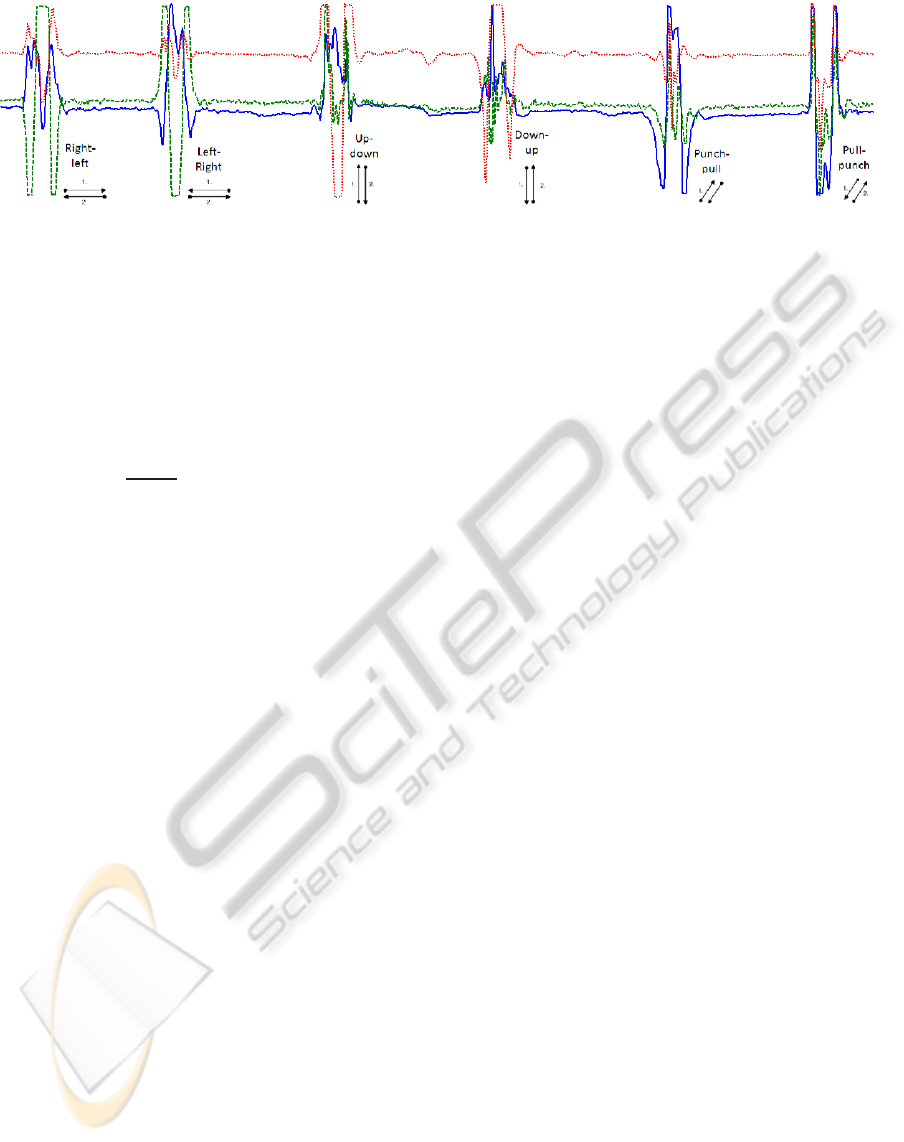
Figure 3: Gestures and corresponding tri-axial acceleration.
of online recognition, the functioning of the sliding
method is in an important role because the starting
point and ending point of the performed gesture is not
known in advance. This means that if sliding method
cannot find these points, it is not possible to recog-
nize the gestures, either. In this study sliding method
presented in (Siirtola et al., 2009) was used.
If more than one template P
i
is found similar to
some subsignal S, then the class of template P
i
for
which the ratio
d(S
k
,P
i
)
δ
i
is the smallest, where δ
i
is
predefined similarity limit for template P
i
, is consid-
ered as a class of subsignal S
k
. Note that different
templates can have different similarity limits because
some gestures are more difficult to perform and rec-
ognize than others.
4 EXPERIMENTS
4.1 Gesture Data
The gesture data presented in Section 2 were tested
in two cases: a user-dependent case where the ges-
ture recognition method was trained and tested with
the same person’s data, and a user-independent case
where the data of the test person were not used in
training.
4.1.1 User-dependent Case
User-dependent version of the method was tested us-
ing three different distance measures: weighted dou-
ble fold (WDF) distance measure (Siirtola et al.,
2008), double fold (DF) (Laurinen et al., 2006)
and DTW. Also two different point-to-point distance
measures were tested, Euclidean distance (ED) and
Chebychev distance (CD).
The results (see Table 1) show that the combina-
tion of WDF and ED produces the highest total recog-
nition accuracy; on average 94.3% of the gestures
were recognized correctly. In fact, this combination
gave the best recognition rates for six out of seven test
persons. It seems that user-dependent version is very
reliable because the gestures of every person can be
recognized with an accuracy of at least 90%. When
DTW and ED are used, the total recognition rate is
4.3 percentage units smaller. According to paired t-
test with 6-degrees of freedom and p = 0.95 this im-
provement is statistically significant.
Note that the recognition rates drop when CD is
used instead of ED as a point-to-point distance mea-
sure. The results show that using Chebychev distance
and DTW or WDF, the gestures of some persons can
be recognized with very high accuracy but the ges-
tures of other persons seem to be difficult to recog-
nize. For instance, using WDF the difference between
the highest and lowest rates is almost 40 percentage
units. CD considers only one dimension relevant, but
the results show that by considering both dimensions
relevant, as is done in the case of ED, better recogni-
tion rates are gained.
The good results using WDF came as no surprise
since WDF is specially designed to measure the simi-
larity of sparse signals, where the data points of the
signals are not distributed at equal-length intervals
(Siirtola et al., 2008). Compression presented in Sec-
tion 3.1 produces such sparse signals.
4.1.2 User-independent Case
In the user-independent case a combination of WDF
and ED was used as a distance measure because the
results of Table 1 show that this combination gives the
highest recognition rates.
Three different ways of choosing class templates
for user-independent gesture recognition were intro-
duced in Section 3.2.2. These methods were com-
pared and the results are given in Table 2.
The highest recognition accuracy of 85.5% was
achieved by using evolutionary selection. This tem-
plate choosing method produced the best recogni-
tion results for five out of seven test persons. Based
on these results it can be seen that the proposed
method can be used for reliable user-independentges-
ture recognition. The other two methods seem to be
almost equally accurate between themselves by rec-
ognizing gestures with an accuracy around 82%.
RECOGNIZING USER INTERFACE CONTROL GESTURES FROM ACCELERATION DATA USING TIME SERIES
TEMPLATES
179
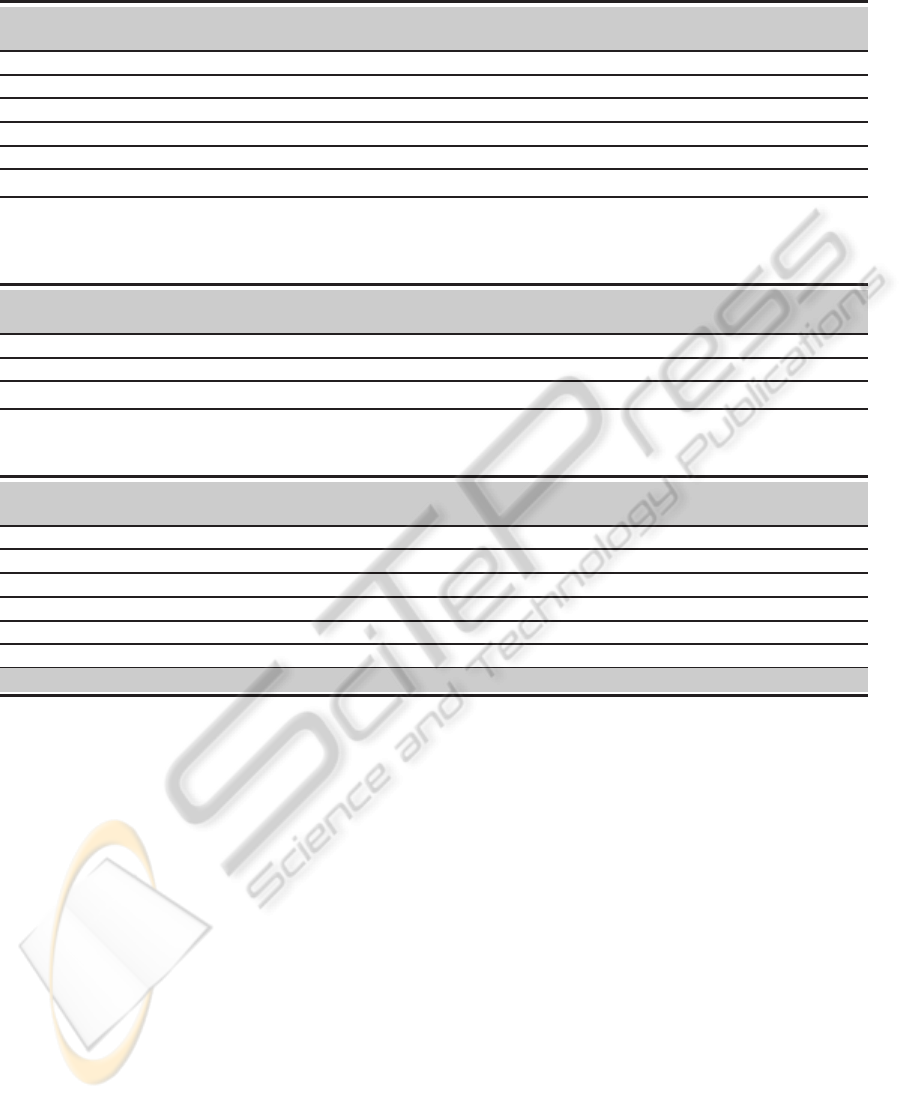
Table 1: Recognition accuracy in a user-dependent case. Comparison of local distance measures and similarity measures.
Measure / Test
person
Person 1 Person 2 Person 3 Person 4 Person 5 Person 6 Person 7 Total
DTW + ED 95.0% 95.0% 93.3% 83.3% 88.3% 93.3% 81.7% 90.0%
DTW + CD 90.0% 91.7% 95.0% 86.7% 60.0% 91.3% 90.0% 86.4%
WDF + ED 95.0% 96.7% 98.3% 90.0% 90.0% 98.3% 91.7% 94.3%
WDF + CD 96.7% 65.0% 91.7% 71.7% 58.3% 96.6% 81.7% 88.6%
DF + ED 95.0% 91.7% 96.7% 78.3% 88.3% 85.0% 81.7% 88.1%
DF + CD 75.0% 88.3% 86.7% 60.0% 66.7% 70.0% 78.3% 74.6%
Table 2: Recognition accuracy in a user-independent case using different template choosing methods. MS = Minimum
selection, AS = Average selection, ES = Evolutionary selection.
Method / Test
person
Person 1 Person 2 Person 3 Person 4 Person 5 Person 6 Person 7 Total
MS 91.7% 81.7% 91.7% 85.0% 85.0% 58.3% 81.7% 82.1%
AS 100.0% 81.7% 91.7% 85.0% 85.0% 60.0% 76.7% 82.9%
ES 100.0% 83.3% 90.0% 80.0% 90.0% 68.3% 86.7% 85.5%
Table 3: User-independent recognition results using the evolutionary template selection method.
Gesture / Test
person
Person 1 Person 2 Person 3 Person 4 Person 5 Person 6 Person 7 Total
Punch-Pull 100.0% 90.0% 90.0% 70.0% 70.0% 80.0% 80.0% 82.6%
Pull-Punch 100.0% 90.0% 90.0% 60.0% 90.0% 80.0% 90.0% 85.7%
Right-Left 100.0% 70.0% 100.0% 100.0% 80.0% 50.0% 90.0% 84.3%
Left-Right 100.0% 100.0% 60.0% 100.0% 100.0% 50.0% 70.0% 82.6%
Up-Down 100.0% 80.0% 100.0% 70.0% 100.0% 80.0% 100.0% 90.0%
Down-Up 100.0% 70.0% 100.0% 80.0% 100.0% 70.0% 90.0% 87.1%
Total 100.0% 83.3% 90.0% 80.0% 90.0% 68.3% 86.7% 85.5%
When the results of the best methods of the user-
dependent and -independent versions are compared, it
can be seen that in most cases the user-independent
version using evolutionary template selection gave
around 10 percentage units worse results than the
user-dependent version using WDF and ED. Still, the
gestures of every person were recognized with high
accuracy using evolutionary selection: the recogni-
tion rates for the gestures of person 1 were in fact
better using the user-independent version. The only
difference was person 6, whose gestures were rec-
ognized user-independently with an accuracy of only
68.3%. Using user-dependent templates, the gestures
of person 6 were recognized almost perfectly, at a rate
of 98.3%. Therefore, the problem is not that the ges-
tures of the test data of person 6 were of low quality
and impossible to recognize. One explanation for the
weak user-independent recognition results is that per-
son 6 had his/her own personal way of performing the
gestures; person 6 especially seemed to perform the
left-right and right-left gestures differently than the
others. These gestures were recognized with an the
accuracy of only 50%, see Table 3. Because persons
seem to have at least two different ways of performing
gestures, it could be wise to choose at least two tem-
plates per gesture, and not just one as was done in this
study, to make user-independent gesture recognition
more reliable.
4.2 Performance Test Data
Performance test data were collected to test the per-
formance and accuracy of the gesture recognition sys-
tem. These data did not include any of the six gestures
and therefore all the detected gestures could be con-
sidered as false positive.
The gesture recognition system was tested using
a Pentium D (3GHz, 2GByte RAM)) powered com-
puter, and the results presented in Table 4 show that
the running time of the presented method was about
15.0% of the duration of the performance test data
sequences. This means the system is over six times
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
180

Table 4: Performance and accuracy of the method.
Person Duration of
performance
data
CPU time
for template
matching
False
positive
results
1 1732s 306s 0
2 1672s 296s 2
3 1604s 340s 0
4 1557s 358s 3
5 1609s 218s 0
6 1791s 297s 5
7 1609s 206s 0
Total 11574s 1745s 10
faster than real-time, without any optimization, there-
fore the method can be used online.
A gesture recognition system is not allowed to
produce false positive results often, because it would
make the user-interface very frustrating to use. Table
4 also shows that the method is very accurate, mean-
ing that it very seldom produced false positive results.
The test sequences were all together over three hours
long and the number of false positive results was only
10. So, on average, the proposed method produced
one false positive result per 20 minutes.
5 CONCLUSIONS
This article presented a gesture recognition method
for recognizing six predefined gestures. The method
is based on template matching and the results show
that it can recognize gestures very accurately and
in real time. Three different distance measures
were tested and the best results were achieved us-
ing weighted double fold distance measure. A user-
dependent version of the system can recognize ges-
tures with an accuracy of 94.3% when WDF distance
measure is used. It was also shown that the improve-
ment gained using WDF is statistically significant.
User-independent version of the method can rocog-
nize gestures with an accuracy of 85.5%. Compared
with other studies, the recognition rates are really
competitive. Most other studies use more than one
sensor, unlike this study, and therefore the achieved
results can be considered state-of-the-art.
The presented method works really well. It sel-
dom produces false positive results and can recognize
gestures with high accuracy. Still, the accuracy of
the user-independent version could be improved by
choosing more class templates, because people seem
to have at least two different ways of performing ges-
tures. Now only one template per gesture was used.
The problem is that this would of course make the
system slower.
The presented gesture recognition system is de-
signed to control a simple user interface, and the next
task is to fuse the gesture recognition system and the
interface together.
ACKNOWLEDGEMENTS
This study was carried out with financial support from
the Sixth Framework Programme of the European
Community for research, technological development
and demonstration activities in an XPRESS (FleXi-
ble Production Experts for reconfigurable aSSembly
technology) project. It does not necessarily reflect
the Commission’s views and in no way anticipates the
Commission’s future policy in this area.
Pekka Siirtola would like to thank GETA (The
Graduate School in Electronics, Telecommunications
and Automation) for financial support.
REFERENCES
Corradini, A. (2001). Dynamic time warping for off-line
recognition of a small gesture vocabulary. In RATFG-
RTS ’01: Proceedings of the IEEE ICCV Workshop
on Recognition, Analysis, and Tracking of Faces and
Gestures in Real-Time Systems, page 82, Washington,
DC, USA. IEEE Computer Society.
Gupta, L., Molfese, D., Tammana, R., and Simos, P. (1996).
Nonlinear alignment and averaging for estimating the
evoked potential. Biomedical Engineering, IEEE
Transactions on, 43(4):348–356.
Ko, M., West, G., Venkatesh, S., and Kumar, M. (2008). Us-
ing dynamic time warping for online temporal fusion
in multisensor systems. Inf. Fusion, 9(3):370–388.
Laurinen, P., Siirtola, P., and R¨oning, J. (2006). Efficient al-
gorithm for calculating similarity between trajectories
containing an increasing dimension. pages 392–399.
Proc. 24th IASTED international conference on Arti-
ficial intelligence and applications, February 13 - 16,
Innsbruck, Austria.
Niennattrakul, V. and Ratanamahatana, C. (2007). Inaccu-
racies of shape averaging method using dynamic time
warping for time series data. In ICCS ’07: Proceed-
ings of the 7th international conference on Computa-
tional Science, Part I, pages 513–520, Berlin, Heidel-
berg. Springer-Verlag.
Siirtola, P., Laurinen, P., and R¨oning, J. (2008). A weighted
distance measure for calculating the similarity of
sparsely distributed trajectories. In ICMLA’08: Pro-
ceedings of the Seventh International Conference on
Machine Learning and Applications.
Siirtola, P., Laurinen, P., and R¨oning, J. (2009). Min-
ing an optimal prototype from a periodic time se-
ries: an evolutionary computation-based approach. In
RECOGNIZING USER INTERFACE CONTROL GESTURES FROM ACCELERATION DATA USING TIME SERIES
TEMPLATES
181

Congress on Evolutionary Computation (CEC 2009),
pages 2818–2824.
Stiefmeier, T. and Roggen, D. (2007). Gestures are strings:
Efficient online gesture spotting and classification us-
ing string matching. In In: Proceedings of 2nd In-
ternational Conference on Body Area Networks (Bo-
dyNets).
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
182
