
AUTOMATIC SEARCH-BASED TESTING
WITH THE REQUIRED K-TUPLES CRITERION
Anastasis A. Sofokleous, Andria Krokou
Department of Computer Science, University of Cyprus, Nicosia, Cyprus
Andreas S. Andreou
Department of Electrical Engineering and Information Technologies, Cyprus University of Technology
31 Archbishop Kyprianos Str. 3036, Lemesos, Cyprus
Keywords: Automatic Testing, Required k-tuples, Genetic Algorithms.
Abstract: This paper examines the use of data flow criteria in software testing and uses evolutionary algorithms to
automate the generation of test data with respect to the required k-tuples criterion. The proposed approach is
incorporated into an existing test data generation framework consisting of a program analyzer and a test data
generator. The former analyses JAVA programs, creates control and data flow graphs, generates paths in
relation to data flow dependencies, simulates test cases execution and determines code coverage on the
control flow graphs. The test data generator takes advantage of the program analyzer capabilities and
generates test cases by utilizing a series of genetic algorithms. The performance of the framework is
compared to similar methods and evaluated using both standard and randomly generated JAVA programs.
The preliminary results demonstrate the efficacy and efficiency of this approach.
1 INTRODUCTION
Software testing approaches that follow a structural
(white-box) scheme, use the source code to reveal
any errors, whereas in a functional (black box)
scheme the testing process does not rely on the
actual source code and the testing techniques use
only the specifications of the program under testing;
a combination of both schemes called gray-box has
been also pursued (Nebut and Fleurey 2006). This
work focuses on white-box testing using JAVA
source code and automatically adapting the testing
process based on the output of the test cases
exercised on the code.
This work presents the implementation of the
required k-tuples criterion, a data flow criterion
incorporated into the automatic test data generation
framework presented in (Csallner and Smaragdakis
2004). The framework utilizes a fusion of program
analysis and test data generation techniques in order
to parse the source code of the program under
testing, create the control and data flow graphs,
extract paths and determine a near to optimum set of
test cases according to a coverage criterion (Korel
1996). This work extends the framework in order to
support the required k-tuples criterion and uses a
new path extraction algorithm, along with the
dependencies defined on the data flow graphs, to
generate the required k-tuples paths. A new
approach to both the encoding of the chromosomes
of the genetic algorithm and the way the fitness
function is calculated allows the test data generator
to achieve high coverage with respect to the required
k-tuples criterion (Sofokleous and Andreou 2008b).
The rest of this paper is organized as follows:
Section 2 presents related work on test data
generation and briefly discusses similar approaches.
Section 3 describes the proposed approach, while
section 4 presents an assessment of its performance
over a number of standard and sample programs and
provides a short comparison with other approaches.
Finally, the last section concludes the paper and
outlines future research steps.
250
A. Sofokleous A., Krokou A. and S. Andreou A. (2010).
AUTOMATIC SEARCH-BASED TESTING WITH THE REQUIRED K-TUPLES CRITERION.
In Proceedings of the 12th International Conference on Enterprise Information Systems - Artificial Intelligence and Decision Support Systems, pages
250-255
DOI: 10.5220/0002902302500255
Copyright
c
SciTePress

2 RELATED WORK
Test cases generation systems aim to determine an
optimum set of test cases with respect to a testing
coverage criterion (Frankl and Weyuker 1988).
While there is a variety of testing criteria, the most
widely known and pursued are the ones which are
defined with respect to control and data flow graphs
(Clarke et al 1989). Related research focused more
on control flow criteria, such as the statement and
edge, as for example the work of (Sofokleous and
Andreou 2008b), which pursues high testing
adequacy based on the edge/condition control flow
criterion (Michael et al 2001, Pargas et al 1999,
Harman 2007).. To achieve high coverage, this
paper utilizes two algorithms, the first runs on the
complete control flow graph to generate test data
massively, whereas the second algorithm is executed
on partial control flow graphs created dynamically
according to uncovered paths.
Recent challenges involve the definition and
implementation of robust data flow coverage criteria
that could be equal or better than the control flow
criteria. This paper presents an attempt to produce
automatically test data with the required k-tuples
data flow criterion (see section 3) (Ntafos 1981,
Ntafos 1984) by utilizing evolutionary algorithms.
To the best of our knowledge, implementation work
and empirical results on this particular criterion has
not been reported elsewhere, despite the fact that this
criterion can achieve better results compared to
those reported thus far. This work extends previous
work that uses the ALL-DU Paths data flow
criterion (Andreou et al 2007, Sofokleous and
Andreou 2008a), where the execution of a test case
is simulated with control flow graphs and the results
of the execution are evaluated using data flow
graphs. We should note here that the ALL-DU Paths
criterion is a data flow criterion proposed by Rapps
and Weyuker, 1982. While the ALL-DU Paths
criterion has not been compared empirically with the
criterion used in this work, many authors support
that the two criteria are equal and can determine the
same errors in a program under testing (Clarke et al
1989, Ntafos 1988). In section 4, however, we show
that in some cases the required k-tuples criterion
generates more paths than the ALL-DU Paths
criterion, which implies a higher level of testing
capability. Section 4 also compares the performance
of our test data generator with a generator that uses
the ALL-DU Paths criterion. Note that some of the
original definitions of the data flow criteria are
ambiguous and, in some cases, differ from the
objective set by their authors (Clarke et al 1989).
Recent work on data flow-based testing can be
found in (Ghiduk et al 2007), where the authors use
genetic algorithms to generate test data according to
data flow criteria. Their approach uses a multi-
objective fitness function to evaluate the produced
data and experiments have showed that their
approach is more efficient over a random test data
generator. A similar approach has been used to
generate test data for FORTRAN programs (Girgis
2005). Data flow based test data generation has been
also addressed in (Khamis et al 2000). This
approach supports both arrays and loops, and the
data generator domain uses partition and reduction
methods on the input data in order to improve the
performance of the generator.
The objective of this work is to present an
evaluation of the required k-tuples criterion and
implement a test data generator that can work
efficiently based on this criterion. The genetic
algorithm implemented for this purpose is guided by
the data flow dependencies given as input to the test
data generator.
The next section shows the implementation
details of the framework supporting the criterion.
3 FRAMEWORK LAYOUT
This paper extends the Automatic Test Cases
Generation System (ATCGS) presented in
(Sofokleous and Andreou 2008b). ATCGS is a
graphical user interactive system that analyses
JAVA programs, creates control flow graphs,
generates test cases and evaluates test data according
to control flow criteria. An extended version of the
framework was introduced in (Andreou et al 2007,
Sofokleous and Andreou 2008a) that generate test
data for data flow paths produced according to the
ALL-USE data flow criterion.
The contributions of this work may be
summarized as follows:
(i) ATCGS is the first tool reported in literature that
can generate test cases according to the required k-
tuples data flow criterion; to achieve the latter, the
system has been enhanced with new modules and
techniques. First, it creates data flow graphs and
utilizes embedded data flow algorithms in order to
generate the paths. Second, the system formulates
test data generation as an optimization problem and
utilizes specially designed genetic algorithms to
solve it, the details of which are given in subsequent
sections.
(iI) This is the first study reporting empirical results
with this particular data flow criterion. Experiments
AUTOMATIC SEARCH-BASED TESTING WITH THE REQUIRED K-TUPLES CRITERION
251

thus far show the efficacy of our system and depict
the applicability of this kind of testing. Both
standard and sample JAVA programs used in this
work are available for downloading from http://
www.cs.ucy.ac.cy/~asofok/testing/testdata.html.
3.1 The Required k-tuples Criterion
in the Basic Program Analyzer
System (BPAS)
In this work BPAS (Sofokleous and Andreou 2008b)
is modified and extended so as to use the control
flow graph and create its corresponding data flow
graph, which is also presented graphically to the
user. The data flow graph is used for generating the
paths which will be executed through test cases
provided by the test data generator. The total testing
coverage is expressed in relation to the coverage
percentage of these paths.
Compared to previous work (Sofokleous and
Andreou 2008b), the test data generator is now able
to generate test cases in relation to the required k-
tuples criterion. According to this criterion the paths
are propagated using the k-dr interactions method
and the data flow graph of the program under testing
(Ntafos 1981, Ntafos 1984). In such types of graphs,
a variable can take any of the forms of a definition
(def), or a computation (c-use) or a predicate (p-use)
(Frankl and Weyuker 1988). Interactions between
different variables are captured in terms of
alternating definitions and uses, called k-dr
interactions; an m-interaction is defined as
[
]
m
m
m
m
x
n
x
n
x
n
x
n
x
n
x
n
x
n
x
n
udududud ,,...,,,,,,
3
13
3
3
2
2
2
2
1
1
1
1
, where
variable x
1
is defined at node n
1
and used at node n
2
,
variable x
2
is defined at node n
2
and used at node n
3
,
etc. Based on number k, which is set by the user,
BPAS generates all possible paths that satisfy the k-
dr interaction criterion.
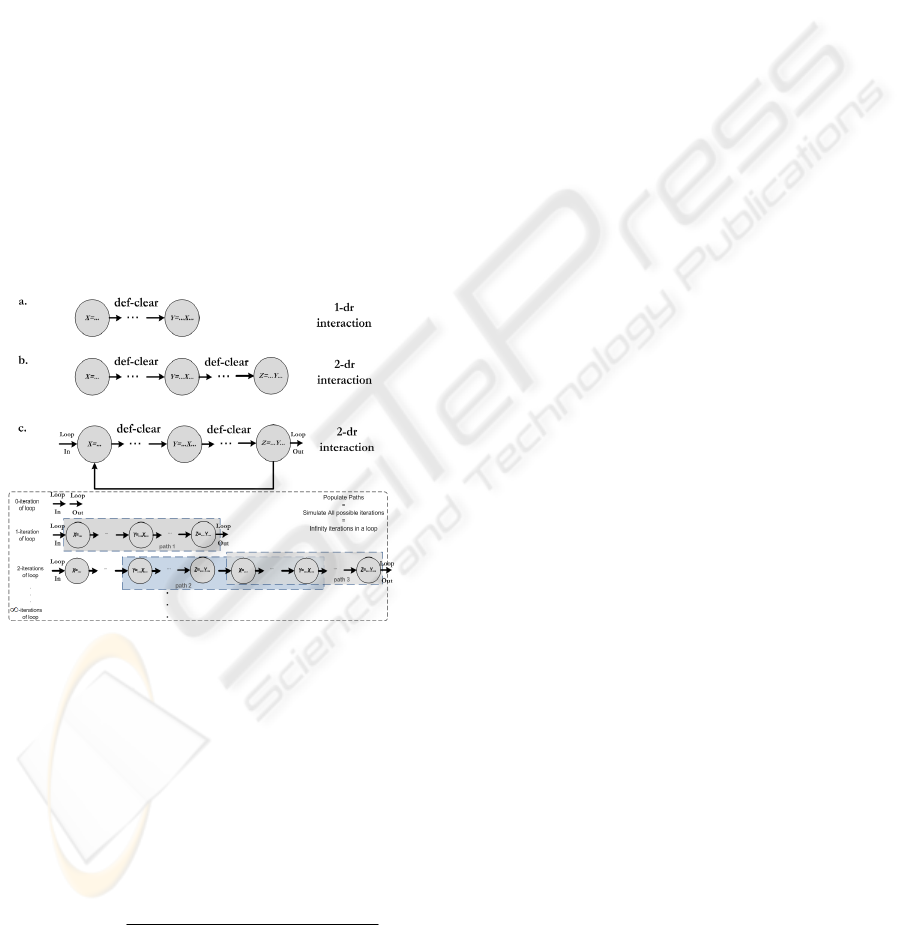
Figures 1a and 1b depict the nodes that satisfy
the 1-dr and 2-dr interaction criteria, respectively. A
def-clear path between two nodes, with respect to
variable X, is a path on which none of its nodes is a
definition (def) of X. Note that a k-interaction set of
paths includes also all the j-interaction paths, where
j=1,...,k.
If a graph contains one or more loop blocks, e.g.
a representation of a FOR or WHILE loop, then, one
or more k-dr interaction paths may be formed using
a sequence of nodes from any of its possible
executions, i.e. the loop can be traversed n times,
where n=0,1,...,
∞ . For example, consider Figure
1c, which shows the source code of a loop. The
problem in this case is that the particular code can
populate an undefined number of 2-dr interaction
paths, the coverage of which cannot be guaranteed
even by exhausting testing. For each loop, we only
populate two groups of paths, if such paths exist; the
first group describes k-dr interaction paths that can
be populated while not entering the loop (i.e. 0-
iteration of the loop), whereas the second group
describes the k-dr interaction paths that can be
populated by traversing i=1,...,k times the loop. Note
that for the latter if at least one path cannot be found
in a maximum of k-iterations of the loop, then a k-dr
interaction path cannot exist even for the case where
the loop is iterated w-times, where w>k.
3.2 Generating Test Data with ATCGS
for the Required k-tuples Criterion
ATCGS communicate with BPAS to utilise the
analysis modules of the latter and then searches the
input space in order to determine and select a near to
optimum set of test cases in relation to the required
k-tuples criterion. The modified ATCGS follows a
focus-based approach as opposed to the batch
optimistic generation described in previous work.
Basically, ATCGS utilises sequentially a series of
genetic algorithms, one GA for each path; if
{
}
12
, , ...,
k
Ppp p=
is the set of paths generated
by BPAS, the invocation of the i
th
GA focuses on
path p
i
, initially i=1. The basic steps of a standard
genetic algorithm are adapted accordingly to reflect
the problem addressed in this work as follows:
Initial Population Generation: First the GA
generates the initial population. Each chromosome
describes a test case, whereas each gene represents
one of the input variables of the code under testing;
some of the details encoded in a gene are the
variable name, type and initial value. Suppose the
testing code entails x, y and z input variables, then
each chromosome will contain three genes to
describe these three variables. Note that both the size
of the chromosomes and the content of the genes
depend on the program under testing and is
automatically adapted.
Evaluation: The GA uses a specially designed
fitness function (see section 3.2.1) which helps
adapting its behaviour based on the selected path;
the objective of the fitness function is to guide the
search process to determine the test case that can
cover the selected path p
i
. The GA communicates
with BPAS so as to execute the test case of each
chromosome, identify the executed nodes and
determine the coverage in relation to path p
i
. If a test
case that covers path p
i
is found, then the GA
terminates and the path is removed from the
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
252
uncovered set of paths, i.e. P’=P-{p
i
}; in this case,
ATCGS proceeds to the next uncover path, if there
is one, otherwise it presents the final results to the
user. The GA may also terminate if it reaches a
maximum number of generations defined by the
user. Note that while the fitness value of each
chromosome is calculated based on the selected path
p
i
, the GA may discover that the test case of a
chromosome accidentally covers a different path,
say p
j
, where j≠i and
Pp
j
∈
; in this case, the GA
associates the test case to the path that it accidentally
covers, removes the path from the set P, and
continues the search for path p
i
.
Selection: The roulette wheel selection operator
selects the chromosomes to participate to the next
generation. Selected
chromosomes are entered to a
pool that is used in the next phase (Mitchell 1999).
Reproduction: Chromosomes are reproduced with
crossover and mutation operations (Michalewicz
1996). The algorithm, then, proceeds to the
evaluation phase.
Figure 1: (a) 1-dr interaction, (b) 2-dr interaction, (c)
populating 2-dr interaction paths for the loop.
3.3 The Fitness Function for the k-dr
Interaction Paths
The fitness function is dynamic as it depends on the
selected path; thus, the same chromosome may have
two different fitness values if it is evaluated in
relation to two different paths. The fitness function
is expressed as follows:
(, )
#
p nodes covered using TC
ij
FpTC
ij
nodes in P
i
=
(1)
where
i
p
is the selected path and
j
TC is the test
case encoded in a chromosome of the population in
the current generation. The maximum fitness value
is 1, which denotes that test case TC
j
achieves full
coverage on path
i
p
. If the fitness function returns 1,
then the current GA terminates and ATCGS selects
the next path in the sequence. However, if the GA is
unable to find a test case after the predefined
maximum number of evolutions, then it assumes that
this is a dead path and terminates the current process
so as to allow ATCGS to continue with the rest of
the uncovered paths.
4 EXPERIMENTAL RESULTS
This section describes several experiments carried
out on both standard and sample JAVA programs.
The experiments were executed on a computer with
Intel Pentium 4 processor at 3.6GHz, 2GB memory
Ram and JDK 1.6 running ON Windows XP
Professional (SP2). The GA population size was set
to 100 chromosomes, while the crossover and
mutation rates were set to 0.5 and 0.2, respectively.
Section 4.1 presents the empirical results of the
system over a series of standard programs and
compares the proposed approach against previous
work. Section 4.2 presents the results on a set of
experiments carried out using a pool of sample
programs with varying lines of codes (LOC) and
complexity.
4.1 Experiments on Standard
Programs
A number of standard programs have been selected
as benchmarks. These programs are:
• Fibonacci.java: Returns the sum of n Fibonacci
sequence of numbers.
• FindMaximum.java: Returns the largest
between two numbers.
• FindMinimum.java: Returns the smallest
between two numbers.
• SumExample.java: Returns the sum of n
numbers, where n is given as a parameter.
Table 1 lists the results of the execution on the
standard programs. The proposed system achieves
100% coverage with respect to the 1-dr interaction
criterion, whereas an algorithm that uses the All-DU
Paths criterion achieves less coverage. The details
of the All-DU Paths algorithm including the design
details of the fitness function, can be found in
(Andreou et al 2007)
. It is worth noting that in this
set of experiments both criteria generate the same
paths. The better performance exhibited by the
AUTOMATIC SEARCH-BASED TESTING WITH THE REQUIRED K-TUPLES CRITERION
253
proposed approach is due to the better design of the
fitness function compared to (Andreou et al 2007):
First it isolates each path, and therefore it does not
bias the population with irrelevant information as it
searches for a specific path; second, it guides the
search process better as it provides an indication on
how close the GA is to cover the selected path. Also,
the good performance and efficiency of the proposed
algorithm is obvious in the second series of
experiments carried out using the 2-dr interaction
criterion; note that this set of experiments is feasible
only in the present work.
Table 1: Comparative results using two different test data
generation algorithms.
Program
Name
Required k-tuples
Criterion
(% coverage)
All-DU
Paths (%
coverage)
(Andreou
et al 2007)
1-dr 2-dr
Fibonacci
100% 100% 83%
FindMaximum
100% 100% 100%
FindMinimum
100% 100% 100%
SumExample
100% 92% 91%
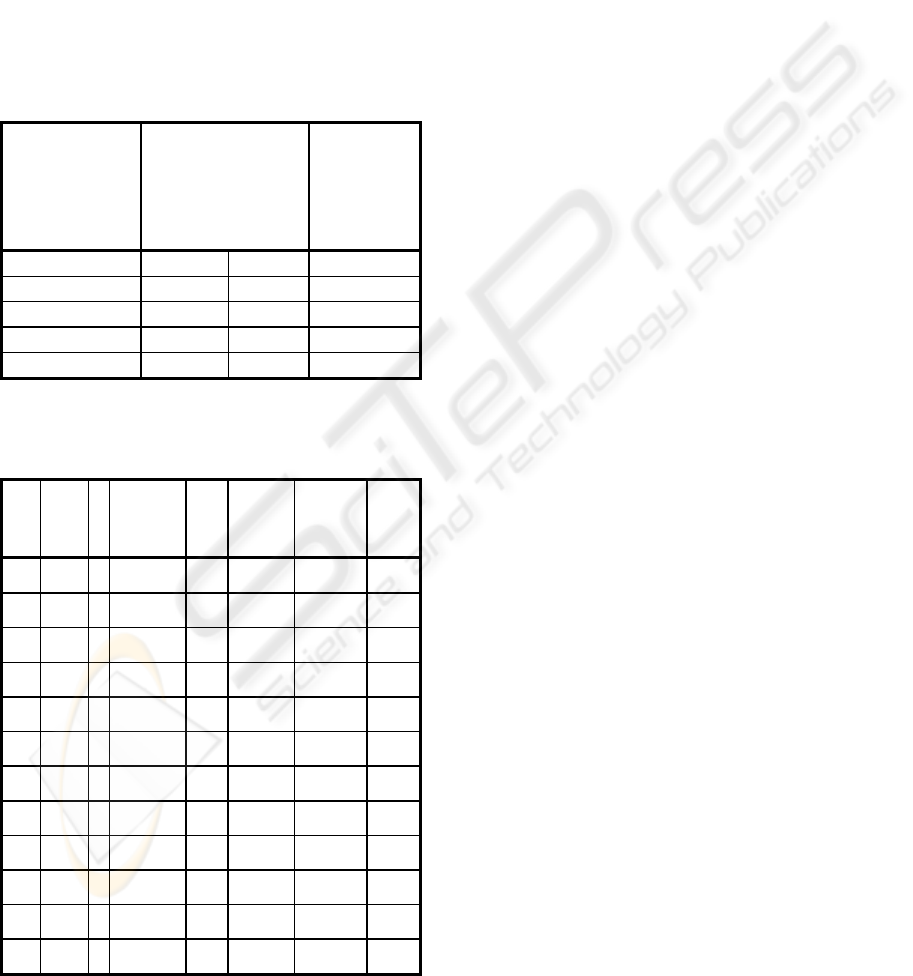
Table 2: Experiments: Complexity as (a) Low if the code
does not contain nested IFs (b) Medium if it contains 1
nested IF, (c) High if it contains 2 or more nested IFs.
LOC
#
nested
if
#
if
Complexity
#test
cases
Coverage
Evolutions
Time
(sec)
20 0 1 L 8
100 % 7 0
20 1 2 M 8
100 % 16 0
20 2 3 H 7
85 % 304 53
50 0 1 L 10
100 % 69 0
50 1 2 M 8
100 % 42 1
50 2 3 H 8
85 % 304 60
80 0 2 L 14
100 % 70 4
80 1 2 M 8
100 % 58 2
80 2 3 H 6
85% 303 60
100 0 4 L 14
100 % 50 17
100 1 3 M 13
100 % 58 5
100 2 4 H 14
85% 314 62
Both approaches of Table 1 extract paths
according to their respective data criterion. If P
ALL-DU
and P
k-tuples
are the sets of paths extracted by the
ALL-DU Paths and required k-tuples criteria,
respectively, experiments show that
k-tuples
P P
ALL-DU
=
, if k=1, whereas
--
1,
A
LL DU k tuples
kP P
∀
>⊇
. The latter is supported
by the fact that the paths are propagated according to
k-dr interactions and involve the paths of all j-dr
interactions, j=1,…,k-1; also, both of the criteria
begin from a definition of a variable and then
require the use of that variable (p-use or c-use),
with the difference being, however, that in the k-dr
interactions criterion, there are chains from
definitions to uses.
4.2 Experiments on Sample Programs
Experiments reported in this section were carried out
on a pool of programs varying on both their lines of
codes (from 10 to 200 LOC) and their complexity
(simple, medium, high). The programs were
produced manually and do not serve any particular
purpose. Note that testing is on a unit basis and LOC
represent the size of a method; thus, testing larger
programs is the same as aggregating the independent
testing of many such methods. Furthermore,
increasing the size (in terms of LOC) of a method
does not affect complexity as the latter depends on
the difficulty of covering a path, i.e. the condition
that participates in a path.
The experimental results listed in Table 2 reveal
a number of important conclusions. The more IF
statements a program has, the more paths it contains
and hence the more test cases are required to cover
its paths; additionally, more time is required to
determine the appropriate test cases for covering all
these paths. As shown in the results, complexity
plays a significant role along with LOC in the time
required for executing the algorithms. The findings
of Table 2 show also that in most cases the test data
generator achieves a 100% testing coverage, while
for programs with high complexity it manages to
reach up to 85% testing coverage with respect to the
required k-tuples criterion. The latter may be the
result of many factors, such as the existence of dead
code and the high complexity of the IF statements.
For small and simple programs the system
terminates in negligible time, whereas there is a
linear dependency between time and lines of code.
As the test data generator of this system works with
a heuristic algorithm, each experimental result
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
254

included in Table2 is the average value over 15 runs
of the same experiment.
5 CONCLUSIONS AND FUTURE
WORK
This paper presented the implementation of a testing
approach based on the required k-tuples data flow
criterion which depends on the paths propagated
with k-interactions. The framework presented in this
work uses a program analyser to generate the control
and data flow graphs, builds dynamically the paths
according to data flow criterion, and searches and
discovers test cases for each of the paths; the user
can view the test cases and interact with the graphs
to view graphically the coverage of each test case.
Experimental results were presented on a number of
standard and random generated JAVA programs.
Future work will carry out additional experiments
using alternative implementations of the fitness
function in order to compare their performance and
investigate whether further improvements may be
achieved. Additionally we plan to implement a
representation model that will combine control flow
graphs with UML diagrammatical notations. This
will allow us to extend the representation models
depicting the execution flow so as to support various
features of object oriented code, such as interfaces
aspects, inheritance, polymorphism and dynamic
binding. Future work will also consider
implementing other data flow criteria (Rapps and
Weyuker 1982, Laski and Korel 1983), and compare
them with the current and previous work. Our
objective is to embed different types of errors in the
programs and compare the efficiency of the
implemented criteria in revealing these errors.
REFERENCES
Andreou, A. S., Economides, K. A. and Sofokleous, A. A.,
2007, An automatic software test-data generation
scheme based on data flow criteria and genetic
algorithms, in: Proceedings of the 7th IEEE
International Conference on Computer and
Information Technology, Fukushima, Japan, October,
(IEEE Computer Society: Los Alamitos, CA, USA),
pp 867-872.
Clarke, L. A., Podgurski, A., Richardson, D. J. and Zeil, S.
J., 1989, A Formal Evaluation of Data Flow Path
Selection Criteria, IEEE Transactions on Software
Engineering, 15(11), pp. 1318-1332.
Csallner, C. and Smaragdakis, Y., 2004, JCrasher: an
automatic robustness tester for Java, Software Practice
and Experience, 34(11), pp. 1025-1050.
Frankl, P. G. and Weyuker, E. J., 1988, An applicable
family of data flow testing criteria, IEEE Transactions
on Software Engineering, 14(10), pp. 1483-1498.
Ghiduk, A. S., Harrold, M. J. and Girgis, M. R., 2007,
Using Genetic Algorithms to Aid Test-Data
Generation for Data-Flow Coverage, in: Proceedings
of the 14th Asia-Pacific Software Engineering
Conference (APSEC '07), Nagoya, Japan, December,
(IEEE Computer Society: Washington, DC, USA), pp
41-48.
Girgis, M. R., 2005, Automatic Test Data Generation for
Data Flow Testing Using a Genetic Algorithm,
Journal of Universal Computer Science, 11(6), pp.
898-915.
Harman, M., 2007, The Current State and Future of Search
Based Software Engineering, in: Proceedings of the
29th International Conference on Software
Engineering (ICSE 2007): Future of Software
Engineering (FOSE '07), Minneapolis, MN, USA,
May 2007, (IEEE Computer Society: Los Alamitos,
CA, USA), pp 342-357.
Khamis, A., Bahgar, R. and Abdelaziz, R., 2000,
Automatic Test Data Generation Using Data Flow
Information, Dogus University Journal, (2), pp. 140-
153.
Korel, B., 1996, Automated test data generation for
programs with procedures, in: Proceedings of the 1996
ACM SIGSOFT international symposium on Software
testing and analysis , San Diego, California, United
States, (ACM Press: pp 209-215.
Laski, J. W. and Korel, B., 1983, Data flow oriented
program testing strategy, IEEE Transactions on
Software Engineering, 9(3), pp. 347-354.
Michael, C. C., Mcgraw, G. and Schatz, M. A., 2001,
Generating Software Test Data by Evolution, IEEE
Transactions on Software Engineering, 27(12), pp.
1085-1110.
Michalewicz, Z., 1996, Genetic. Algorithms + Data
Structures = Evolution Programs, 3rd edn., (Springer-
Verlag: London, UK).
Mitchell, M., 1999, An Introduction to Genetic
Algorithms, 1st edn., (MIT Press: London, Uk).
Nebut, C. and Fleurey, F., 2006, Automatic Test
Generation: A Use Case Driven Approach, IEEE
Transactions on Software Engineering,
32(3), pp. 140-
155.
Ntafos, S. C., 1988, A comparison of some structural
testing strategies, IEEE Transactions on Software
Engineering, 14(6), pp. 868-874.
Ntafos, S. C., 1984, On required element testing, IEEE
Transactions on Software Engineering, 10(6), pp. 795-
803.
Ntafos, S. C., 1981, On testing with required elements, in:
Proceedings of IEEE-CS COMPSAC, November 1981,
(IEEE CS: pp 132-139.
AUTOMATIC SEARCH-BASED TESTING WITH THE REQUIRED K-TUPLES CRITERION
255
