
RFID Uses for Prosis Ambient Control
Patrick Pujo, Yves Dubromelle and Fouzia Ounnar
LSIS, Av Esc. Normandie Niémen, 13397 Marseille cedex 20, Marseille, France
Abstract. Product traceability is now an obligation in terms of observability
and flexibility of manufacturing systems and logistics chains. RFID
technologies are due to be more and more integrated into existing
communication networks. New infotronics technologies will enlarge the
capabilities to interact, to react and to customise control systems with
innovative possibilities. New control approaches should be proposed based on
the use of emerging technologies that would allow their operability in
manufacturing sites. A model for ambient control production systems is
proposed, based on a set of holonic entities interacting through set of entities
that offer ambient service. After describing the PROSIS model, the ambient
services that can be provided are presented.
1 Introduction
Ambient intelligence applied to manufacturing systems will deeply transform
approaches to production organisation and control. Infotronics technologies [4] will
enlarge the capabilities to interact, to react and to customise control systems with
innovative possibilities that should already be envisaged and thoroughly studied.
Indeed, future production needs are already expressed through emerging paradigms
such as mass customisation requiring individualised and flexible product tracking,
lean approach leading to drastic stock reduction and enhanced flow control, Six sigma
approaches bringing more rigour and requirements in the results to be achieved, or
product traceability obligation, in particular for safety and maintenance needs.
In order to address these objectives, new control approaches should be proposed,
based on the use of emerging technologies that would allow their operability in
manufacturing sites. Indeed, in a highly competitive international environment, the
control of production system with efficiency is a key point for a company. Traditional
management and control methods show their limits against the increase of production
constraints, and it becomes essential to study new control approaches. We propose,
for the control of production systems, architecture without any hierarchical decision-
making dimension. The proposed approach uses holonic paradigm and multicriteria
model in the decisional process.
After presenting the actual research works in infotronics technologies applied to
control systems, we will propose a model for ambient control systems in production,
based on a set of holonic entities interacting through set of entities that offer ambient
service. Finally, we will describe the various parts of this model, whether nomadic or
Pujo P., Dubromelle Y. and Ounnar F.
RFID Uses for Prosis Ambient Control.
DOI: 10.5220/0002911000810088
In Proceedings of the 4th International Workshop on RFID Technology - Concepts, Applications, Challenges (ICEIS 2010), page
ISBN: 978-989-8425-11-9
Copyright
c
2010 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

not, in general interaction or in specialised interaction. We will then present some of
the ambient services that can be provided.
2 Manufacturing Ambient Control
The ambient intelligence concept comes from the federation of topics that are of
apparent different nature, like nano and micro systems, wireless technologies,
distributed computation or sensor technologies. One objective of the convergence
between these technologies is to provide new users services, such as home
automation, Smart Objects… This ambient intelligence concept, also called ubiquity,
gives users the possibility to interact from any place with many interconnected
infotronics devices, sensors and actuators, embedded around them and operating
through ad hoc networks with distributed architecture. Intelligence is referred to as
ambient because of the omnipresence of wireless communicating non apparent
computing agents. The common point between future production imperatives as those
mentioned above is the increasing need of ad-equation between the current
manufacturing system and its associated information system [19], combined with
deeper granularity in which the detail level is at part unit. Infotronics technologies
offer a large scope of solutions to answer these imperatives and find already many
applications in the manufacturing system area, changing usual operating modes.
According to [10], the impact of introducing such technologies in manufacturing
systems is considerable. It concerns for instance fast improvement of product tracking
allowing stock level reduction and improved exploitation of product availability, due
to real time reliability of product data. On a longer term, more advantages can be
developed for mass customisation management [6], product secureness [3] or
collaborative production-distribution organisation [17].
Presently, research concerns essentially the migration from simple use of
infotronics technologies (like RFID: Radio Frequency IDentification) to the concept
of intelligent product and its induced applications in heterarchical control. [14]
propose the concept of self scheduling driven by the product or by the interaction
product-process. This interaction allows local and contextual generation of tasks
oriented trade used for real time control of the resource. A product carries information
that it is able to communicate to the decision centres associated to resources. In that, a
product can be qualified as active. The entity managing immaterial aspects
(information, communication and decision) is called I-product. This definition is
closed to that given by [9], which defines an intelligent object by only its
communication ability, completed by its associates’ service delivery, communication
transparency and environment adaptability to intelligence. In parallel, [10] defines the
intelligent object concept as a dual object (physical and virtual) with information
processing capability (memory, communication, computing, action …). A
complementary concept is the one of extended product [18] which associates a
provided service to the product. This service, more and more intelligent, should be
compliant with customers’ needs. In order to offer high value added services related
to a physical product, this one should be associated to an immaterial component
carrying information and knowledge and made of services, engineering, software…
According to Hribernik [5], this immaterial component, called Avatar, allows
100

implementing the global concept of distributed production and decentralised
information management specific to each product. In this context, the use of new
technologies, such as RFID, wireless networks and ubiquitous processing allows
linking the product to a network of applications related to production, maintenance…
In France, Product Driven Systems are subject to new investigations dealing on one
hand with the control of interactions between fabrication process and product and on
the other hand, with the integration of new technologies such as Wireless Sensor
Networks and Radio Frequency Identification in the cybernetics loop. These
technologies should provide the product with memory, computation and
communication capabilities: it thus becomes ‘active’ within the manufacturing system
that processes it. This ‘active’ product can be given means for capturing environment
variations, making decisions and thus fully interacting with its environment (process
resources, other products, human operators, etc.) [12]. Finally, whatever name given,
I-product, virtual product, extended product, avatar or other, future operation of
manufacturing systems will rely on this type of entity. However, objects of different
nature will have to inter-operate: the holonic paradigm [7] is not restricted in the
Holonic Manufacturing Systems [8] to an oriented product vision only; there exist
other types of holonic entities with a role as much important. Among proposals from
the HMS community [2], Product, Resource and Order Holons are three types of basic
Holons that are most recurrent [15]. We are referring to the most known holonic
architecture: PROSA [20]. Starting from there, the control of manufacturing systems
by products only is not enough. Indeed, the product as such does not carry all the
operational constraints and all related information that would allow making optimal,
or at least satisfactory, control decisions. Each of the two other Holon types (Resource
and Order) brings its own set of data and constraints, making a different viewpoint.
To take into account these data and constraints, we propose control that integrates
different viewpoints coming from different interacting entity types.
3 Prosis Model
3.1 PROSIS Model Presentation
PROSIS (Product, Resource, Order, Simulation Isoarchical System) [13] proposes a
holonic and isoarchical approach that facilitate the implementation of ambient control
solutions for manufacturing systems. We wish to study and develop decision
mechanisms with architecture and information system being as close as possible of
the material system, even to the image of the organisation of this system, and directly
interconnected to it via infotronics technologies. This approach objective is to gain in
terms of structural and decisional flexibility, and thus in terms of reactivity and
adaptability.
Initially thought for modelling complex social systems, holonic systems are made
of entities (the Holons) in mutual interactive dynamic relationships. A Holon should
be seen as a whole or a part of a whole: this is the Janus effect expressing among
others recursion notions. This approach marks a break with previous hierarchical
models in which components are of the type ‘master - slave’ following a tree like and
not varying topology of decision centres. This is reinforced with the respect of orders
101

by the slave decision centre. Indeed, a Holon has a decisional intelligence giving the
possibility to act on its own behaviour and also to act on the behaviour of the systems
it belongs to [15]. Hierarchical decomposition is replaced by Holon recursion and
implementation of the Janus effect. This opens a wide level of freedom for the
implementation of a control system according to an heterarchical architecture, that is
able to mix centralised and non centralised parts.
Different holonic architectures are proposed in the literature for control HMS [2].
These architectures present however the inconvenient of giving an important place to
the hierarchy concept in decision making. For example, when basic Holons cannot
find in PROSA a scheduling solution, a solution is derived by a Staff Holon which
uses a centralised processing algorithm. In order to simplify the implementation of an
ambient control system, we suggest that all interacting entities be at the same decision
level. Thus, there is no possibility of decisional hierarchy leading to manage
complicated decision making rights. This means an isoarchical architecture. The
isoarchy concept (word made from Greek iso (equal) and archy (power)) refers to the
same decision power and thus to a complete absence of hierarchy. In a decision
system made of several decision centres, a decisional architecture can be qualified as
isoarchical when each decision centre has the same decision capability. This property
can easily be obtained when decision mechanisms are duplicated in each decision
centre and appropriately parameterised. Isoarchy appears as a particular specification
of the concept of heterarchy and as the opposite of the concept of hierarchy [11].
However, within this category it expresses an even concept that can be applied only to
truly and totally equalitarian architectures. This particular situation between Holons
has been foreseen in holonic systems through the concept of ‘flat holonic form’ [1].
However, this architecture in which relationships between Holons makes a complete
graph was not really deeply studied.
PROSIS aims to explore this approach which is specially suited to ambient control
systems: indeed, a single hierarchy level permits Holons to directly and simply access
entities offering ambient services. The absence of a central decision system forbids
any predefined or forecast organisation of manufacturing system operations. These
should thus be progressively organised by the Holons themselves with the support of
ambient service entities. This self-organisation assumes real-time characteristics
considering all information characterising each Holon contributing to define the
operations. We then talk about self-organised control functions. These functions are
integrated into the intelligence associated to each Holon. For that, we define a Holon
as a conceptual entity based on the association of a Material Structure (the M_holon),
an Information System and a Processing System (the I_holon) that provides a
decisional intelligence allowing interaction with other Holons. This structure allows
recursive decomposition of manufacturing systems, in compliance with the holonic
paradigm, by clearly showing the duality and parallelism between the real world
(material) and the informational world (immaterial, in which data and decision
making stands).
For a nomadic Holon, the main problem is synchronisation between material and
immaterial parts of this Holon. This is solved with infotronics technologies: The
M_holon has an ID tag containing at the minimum a unique identification number
associated to the Holon whose value is stored in the information system of the
I_holon.
102

A network of I_holons can be associated to a set of Holons making a
manufacturing system to create an I_holon hyper graph following recurrent
composition rules. We shall describe the different base Holons: the Product Holon
(PH), the Resource Holon (RH) and the Order Holon (OH) which feature evolutions
with respect to PROSA. Management of production related knowledge results from
interactions between these three types of Holons.
PH-RH interactions provide process knowledge: resource operating methods,
capacity, reachable quantities and possible results. PH-OH interactions indicate
production knowledge: batches description (quantities to deliver, product reference,
delivery schedule …). RH-OH gives execution process knowledge: follow up of
process execution by resources, monitoring of progress, of process interruptions …).
However, a major difference with PROSA is the disappearance of the Staff Holon
which is not needed in an isoarchic context. We replace it by a Simulation Holon
having a totally different objective: starting from the manufacturing system status
obtained by analysing interactions between the other Holons, the aim is to simulate
the manufacturing system evolution, to provide evolution indications to the workshop
manager and to anticipate eventual failures via diagnosis actions.
This Holon does not contribute to self organisation, but it facilitates the role of the
workshop manager: it provides control with proactive properties. The Simulation
Holon is not addressed in this paper.
3.2 Product, Resource & Order Holons
A Product Holon is made with a M_product (the material object) and an I_product
containing the fabrication process (knowledge needed to perform product
manufacturing and to obtain appropriate quality) and also its state model and all
traceability information; in other words containing respectively a product future,
present and past. Therefore, there exist in PROSIS as many PH instances as
manufactured products or/and Work In Progress products. This is a major difference
with respect to PROSA in which the Product Holon acts as an information server to
the other Holons of the HMS, delivering technical information for a given type of
product but not containing products state information. By definition in manufacturing,
a product is a nomadic entity. It is thus necessary to identify it and, for that, to tag it.
Unit identification goes through the deployment of ad hoc technologies linking each
M_product to its I_product. A good example of these technologies is RFID with an ID
tag attached to the M_product carrying at least an identification number, eventually
completed with key information of the I_product. Other information stored in the
central database and accessible through a network can be associated to this nomadic
information.
The Resource Holon is conceptually similar to the definition proposed in PROSA:
it includes a material part, like automated equipment (NC machine tools, industrial
robot), making an M_resource, and an information processing part, the I_resource,
which drives the equipment and contributes to allocate tasks to the resources.
Resource allocation methods for the I_resource are not the same as those in PROSA
since interactions with the other types of Holons are defined in an isoarchical context.
Furthermore, RF identification is implemented only in the case of nomadic resources,
like mobile robots, shuttles, etc.
103

An Order Holon represents a task in a manufacturing system: a manufacturing
order concerning in general a set of PH. It is responsible for the performance of
assigned work within specified times. It is thus closely linked to the concept of batch,
WIP and delays / lead time. This is a nomadic entity with a strong link with one (or
several) Product(s) Holon(s). The I_order checks dates satisfaction during work
performance and about the consideration of economic factors (batch size, WIP (Work
in Progress) volume, minimisation of production changes, batch partition, etc.). The
M_order will be, according to the case, the manufacturing order with an ID tag, or the
container also tagged, allowing the manipulation of one or several M_products.
4 RFID Functions in Ace
Self organisation of a set of Holons suggests that control decisions must be taken
locally. PROSIS naturally reflects the physical organisation of Holons: around each
M_resource are physically placed p M_products and k M_orders. These k M_orders
are related to the p products (k less or equal to p). Self organised decision making in
control requires the participation of all the locally implicated entities: resource, orders
and products.
For that, local and specific interactions will be established between the I_holons of
the (1+p+k) concerned Holons. These I_holons make a local ‘Flat Holonic Form’. It is
clear that these Holons do not all have the same objective: some trade-off should be
found to facilitate the emergence of a good control solution.
In order to manage this, an ACE (Ambient Control Entity) providing I_holons with
various ad hoc services is associated to each resource. The ACE also offers services to
the Holons making the WIP associated to this resource.
The first type of ambient service offered by an ACE is reception of the (1+p+k)
I_holons, made each of their information system (own data, reconstruction of the
current Holon state) and of an instantiation of their decisional system. An ACE
contains mechanisms allowing the management and the access to the information
related to these I_holons. Also, an ACE has a RFID coupler allowing managing the
information related to resource WIP according to input/output products.
Synchronisation between the I_holons and the M_holons ensures compliance between
the physical world and the information system. When a product or a products batch
arrives in the resource WIP (or leaves it), the corresponding ID tag is read and the
whole set (I_product, I_order) is updated (added to or taken out the ACE information
structure).
When an I_product or I_order is activated, its internal thread starts, triggered by
the RFID event (figure 1). This thread becomes then the decisional system of the
I_holon. It can for example decide to move to another resource if the current one
become too slow or if it is down. It is stopped and destroyed when the RFID coupler
indicates that the M_product or M_order has leaved the resource WIP.
104
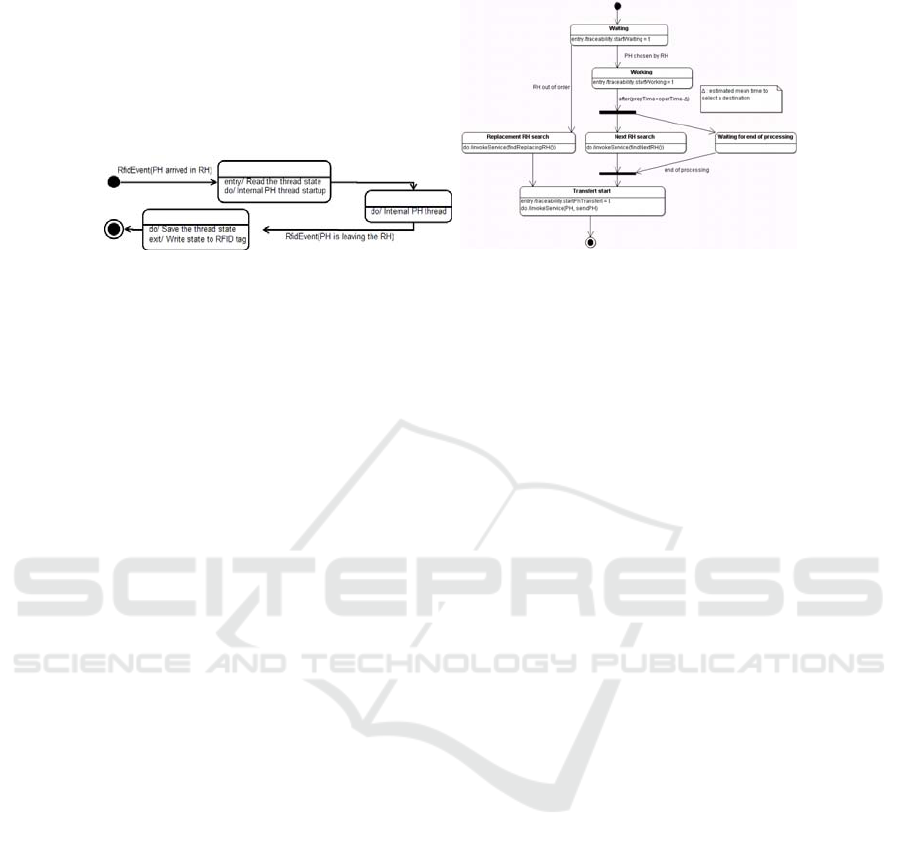
Fig. 1. Thread control via RFID events.
Our RFID hardware is composed of 13,56MHz couplers compatible with both ISO
14443 (all subtypes) and ISO 15693 cards, with a 4cm R/W range. We have chosen
4Kb memory ISO 14443-2 B chips with 106Kb/s transfer rate and anticollision
functions. They use Calypso technology.
Among ambient services also proposed by an ACE, we find visualisation through a
Human-Machine Interface (HMI), real time self organisation through mono- or multi-
criteria heuristics, real time indicator calculation, performance analysis, archiving or
traceability.
5 Conclusions
The future needs of the production systems lead to introduce more intelligence in the
core of these systems. The PROSIS model gives an answer by bringing decisional
intelligence to the products, resources and orders, via a holonic approach. To support
the holons, ACE are used. They propose ambient services to the holons, like hosting,
instantiation, or synchronization between I_holons and M_holons, using RFID
technology.
This allows the improvement of the real time control of the production system,
using multicriteria decision algorithms of AHP type.
References
1. Bongaerts, L., Monostori, L., McFarlane, D. and Kadar, B., 2000. Hierarchy in distributed
shop floor control. Computers In Industry, 43, pp.123-137.
2. Deen, S.M., 2003. Agent-Based Manufacturing – Advances in the Holonic Approach.
Springer-Verlag Ed, ISBN 3-540-44069-0.
3. Dobre D., Bajic E., 2008. Active product modeling for chemical security management
based on smart object concept. Proceeding of MOSIM'08 International Conference, Paris –
France
4. Djurdjanovic, D., Lee, J. and Ni, J., 2003. Watchdog Agent – An Infotronics Based
Prognostics Approach for Product Performance Assessment and Prediction. International
Journal of Advanced Engineering Informatics, 17 (3-4), pp.109-125.
105

5. Hribernik, K.A., Rabe, L., Thoben, K-D. and Schumacher, J., 2006. The product avatar as a
product-instance-centric information management concept, International Journal of
Product Lifecycle Management, 1 (4), pp.367–379.
6. Huang, G.Q., Zhang, Y.F. and Jiang, P.Y., 2007. RFID-based wireless manufacturing for
walking-worker assembly islands with fixed-position layouts. Robotics and Computer-
Integrated Manufacturing, 23 (4), pp.469-477.
7. Koestler, A., 1967. The ghost in the machine. London: Editions Hutchinson.
8. Mathews, J., 1995. Organizational foundations of intelligent manufacturing systems - the
holonic viewpoint. Computer Integrated Manufacturing Systems, 8 (4) pp.237-243.
9. Mattern, F. and Sturm, P., 2003. From Distributed Systems to Ubiquitous Computing – The
State of the Art, Trends, and Prospects of Future Networked Systems. In: Klaus Irmscher
and Klaus-Peter Fähnrich, eds. Proc. KIVS 2003, pp.3-25, Springer-Verlag
10. Mc Farlane, D., Sarma, S., Chirn, J.L., Wong, C.Y. and Ashton, K., 2003. Auto ID systems
and intelligent manufacturing control. Engineering Application of Artificial Intelligence, 16
(4), pp.365-376.
11. Mesarovic, M.D., Macko, D. and Takahara, J., 1970. Theory of Hierarchical Multilevel
Systems. New York: Academic Press.
12. Morel, G., Va1ckenaers, P., Faure, J.M., Pereira C., and Dietrich, C., 2007. Manufacturing
plan control challenges and issues. Control Engineering Practice, 15 (11), pp.1321-1331.
13. Ounnar, F., Pujo, P., 2009. Pull control for Job Shop: Holonic Manufacturing System
approach using multicriteria decision-making, Journal of Intelligent Manufacturing, DOI
10.1007/s10845-009-0288-4
14. Pujo, P. and Brun-Picard, D., 2002. Pilotage sans plan prévisionnel ni ordonnancement
préalable. In: P. Pujo and J.P. Kieffer, eds. Collection IC2 - Productique : Méthodes du
pilotage des systèmes de production. Paris: Hermès Science Europe Ltd.
15. Pujo, P., Broissin, N., and Ounnar, F., 2009. PROSIS: An isoarchic structure for HMS
control, Engineering Applications of Artificial Intelligence, 22 (7), pp.1034-1045
16. Saaty, T., 1980. The Analytic Hierarchy Process, Mc Hill.
17. Soroor, J., Tarokh, M.J. and Shemshadi, A., 2008. Initiating a state of the art system for
real-time supply chain coordination. European Journal of Operational Research,
DOI:10.1016/j.ejor.2008.03.008.
18. Thoben, K. D., Jagdev, H. and Eschenbaecher, J., 2001. Extended Products: evolving
traditional product concepts. Proceeding of the 7th International Conference on Concurrent
Enterprising, Engineering the Knowledge Economy through Co-operation. Bremen,
Germany, pp.429-439.
19. Udoka, S.J., 1991. Automated data capture techniques: A prerequisite for effective
integrated manufacturing systems. Computers & Industrial Engineering, 21 (1-4) pp.217-
221.
20. Van Brussel, H, Wyns, J., Valckenaers, P., Bongaerts, L. and Peeters, P., 1998. Reference
architecture for holonic manufacturing systems: PROSA. Computers in Industry, 37,
pp.255-274.
106
