
A GENETIC PROGRAMMING APPROACH TO SOFTWARE
COST MODELING AND ESTIMATION
Efi Papatheocharous, Angela Iasonos
Department of Computer Science, University of Cyprus
75 Kallipoleos Street, P.O. Box 20537, CY1678 Nicosia, Cyprus
Andreas S. Andreou
Department of Electrical Engineering and Information Technologies, Cyprus University of Technology
31 Archbishop Kyprianos Street, 3036 Lemesos, Cyprus
Keywords: Software Cost Estimation, Genetic Programming.
Abstract: This paper investigates the utilization of Genetic Programming (GP) as a method to facilitate better software
cost modeling and estimation. The aim is to produce and examine candidate solutions in the form of
representations that utilize operators and operands, which are then used in algorithmic cost estimation.
These solutions essentially constitute regression equations of software cost factors, used to effectively
estimate the dependent variable, that is, the effort spent for developing software projects. The GP
application generates representative rules through which the usefulness of various project characteristics as
explanatory variables, and ultimately as predictors of development effort is investigated. The experiments
conducted are based on two publicly available empirical datasets typically used in software cost estimation
and indicate that the proposed approach provides consistent and successful results.
1 INTRODUCTION
The issue of locating functions (or equations) in
software cost estimation to effectively describe
effort, usually expressed in person-months, is a long-
pursued objective in the software engineering
research and practise. Essentially a software
manager requires a viable method to predict, or at
least approximate, the total costs spent, including
money, physical and technical resources, as well as
the effort required to generate a software product
during the development process. Nevertheless, the
software industry’s inability to provide accurate
estimates of development effort is well known.
Inaccuracies of the effort required in software
projects by organizations have a strong impact on
their business continuity, reputation and
competitiveness. This occurs because effort
estimates are strongly related to correct budget and
schedule planning acquisition, while they also affect
the delivery of high quality software with the
minimum expenditures in resources. Literature
shows that the average effort overruns has not been
considerably improved over the last 10-20 years
while the fields of research for cost estimation and
industry are quite disconnected (Jørgensen and
Shepperd, 2007). The main difficulties and
limitations that impose this disconnection stem from
the dynamic nature of the software development
process. Specifically, the process faces risks
associated with the uncertain parameters at the
beginning of a new project, the lack of trained
estimators with the necessary expertise to support
the estimation process and the hindering factors
related to people, process and product developed,
that eventually affect cost. These factors relate to
high software complexity, volatile technologies,
development group dynamics and skills,
complicated team communication networks and
cohesion.
Software effort prediction is usually based on
historical project data samples either gathered within
or outside the development organization. Analyzing
the data that relate the project characteristics (of
nominal, ordinal, or numerical nature) with project
281
Papatheocharous E., Iasonos A. and S. Andreou A. (2010).
A GENETIC PROGRAMMING APPROACH TO SOFTWARE COST MODELING AND ESTIMATION.
In Proceedings of the 12th International Conference on Enterprise Information Systems - Databases and Information Systems Integration, pages
281-287
DOI: 10.5220/0002911602810287
Copyright
c
SciTePress

costs (primarily effort) is greatly appreciated and
required in most effort estimation models. The aim
of this paper is to attempt to offer effort prediction
with the use of evolutionary models and more
specifically structures that are automatically created
and serve as candidate solutions through Genetic
Programming (GP). These structures combine
different cost factors in simple mathematical
equations, close to regression models, which are
assessed in terms of how accurately they calculate
effort values within two cost estimation datasets.
The rest of the paper is organized as follows:
Section 2 presents a brief background review of
software cost estimation literature and presents a
short description of the methods used. Section 3
describes the use of GP on the public datasets
selected for experimentation. Section 4 presents the
basic concepts of GP and explains how these were
modified to be applied for software cost estimation.
A detailed description of how the experiments were
designed and conducted is provided in Section 5,
along with the prediction results obtained by
executing the best equations provided by the GP,
which calculate the expected effort. Finally, Section
6 presents the conclusions, discusses briefly some
limitations and outlines future research steps.
2 BACKGROUND LITERATURE
OVERVIEW
Over the last thirty years substantial work has been
conducted using estimation techniques ranging from
algorithmic and estimation-by-analogy to expert
judgement and machine learning techniques. These
techniques aim to acquire improved estimation
models that could enable project managers to
effectively manage project resources. They rely, in
a varying degree, on previous experiences or
concentrated project data to develop software cost
models. The specified information reflects previous
project experiences and typically describes the
characteristics of completed projects. Most models
developed focus on explaining the effort using a
variety of project factors, usually of a numerical
nature. More specifically, algorithmic models
attempt to introduce mathematical equations
containing cost factors for estimating the associated
development effort, usually via regression
techniques. They may also use expert judgment,
which relates to consulting several experts on the
proposed software development technique and
application domain. Well-known examples are
SLIM (Putnam, 1978), Function Points Analysis
(FPA) (Albrecht, 1979), COCOMO I (Boehm, 1981)
and the newer version of COCOMO II (Boehm et
al., 2000), etc.
Machine learning approaches in software cost
estimation, flourishing mostly in the mid 90s, reach
to better effort approximations and automate the
process of searching enhanced solutions. Such
applications include artificial neural networks
(Heiat, 2002; Papatheocharous and Andreou, 2007),
evolutionary algorithms such as genetic (Burgess
and Leftley, 2001; Lefley and Shepperd 2003;
Huang and Chiu, 2008; Razmi et al., 2009), fuzzy
logic (Xu and Khoshgoftaar 2003), etc.
It is frequently the case that machine learning
techniques are compared with the classical
regression method, which serves as the benchmark
(Burgess and Leftley, 2001; Heiat 2002; Lefley and
Shepperd 2003). The reason for applying diverging
methods over the same datasets stems from the
hypothesis that different methods may obtain a
different and more successful description of the
relationship between project attributes. However,
finding and analyzing all possible combinations of
solution relationships for estimating effort is
difficult, complex and time consuming. Thus, the
problem to determine the optimal regression
expressions in the sense of prediction ability and
relative error for cost estimation may be viewed as
an optimization problem imposing computational
challenge. Additionally, in such optimization
problems, where the search space is huge, among the
most popular techniques lay the Evolutionary
Algorithms and especially when the space involves
regression equations Genetic Programming (GP) is
considered a widely-accepted alternative. The latter
technique does not require any knowledge a-priori
and provides usually close approximations to the
optimum solution. Furthermore, unlike classical
regression approaches that assume normal
distribution for the data, it makes no such
assumptions. GP implementations may explore all
possible combinations of regression equations based
on natural evolution and on the Darwinian theory of
natural selection (Holland, 1992). GP may also be
considered a promising method for obtaining
optimized modelling of the software cost estimation
problem because it is an adaptive search technique,
able to explore a vast set of potential solutions,
which once they are obtained, they can be
comprehensively understood and easily interpreted
by individuals. More information on Genetic
Algorithms (GA) and Genetic Programming (GP)
may be found in (Koza, 1992; Michalewicz, 1994).
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
282
3 APPLYING GP FOR
SOFTWARE COST MODELING
The proposed implementation of Genetic
Programming (GP) seeks and locates appropriate
equations of various cost factors which characterize
the dependent variable (development effort) in the
best possible way based on specific grammars. The
overall research procedure followed was to apply GP
on two different publicly available datasets and
attempt to guide the solution towards regression
equations that provide the highest level of prediction
ability and the smallest relative error. A brief
description of the empirical datasets utilized in this
work follows.
The COCOMO dataset (Boehm, 1981) includes a
set of cost drivers that define the subjective
assessment of the product, hardware, personnel and
project attributes for 63 software projects of
different applications. The cost factors used in the
experiments are: RELY (Required Reliability),
DATA (Database Size), CPLX (Product
Complexity), TIME (Execution Time Constraint),
STOR (Main Storage Constraint), VIRT (Virtual
Machine Volatility), TURN (Computer Turnaround
Time), ACAP (Analyst Capability), AEXP
(Applications Experience), PCAP (Programmer
Capability), VEXP (Virtual Machine Experience),
LEXP (Programming Language Experience), MODP
(Modern Programming Practices), TOOL (Use of
Software Tools), SCED (Required Development
Schedule) and LOC (Lines of Code). The actual total
effort recorded in person-months against the projects
is also used to calculate the accuracy estimate
obtained by the GP regression equations.The
Desharnais dataset (Desharnais, 1989), was used
after excluding null and categorical values. It
comprised of 77 observations of systems developed
by a Canadian software development house and the
following cost features: TEAM EXP., MANAGER
EXP., LENGTH, TRANSACTIONS, ENTITIES,
POINTS AJUST, ENVERGURE, POINTS NON
AJUST. The actual development effort recorded in
person-hours was also used as the output attribute.
4 DESIGN OF THE
EXPERIMENTAL APPROACH
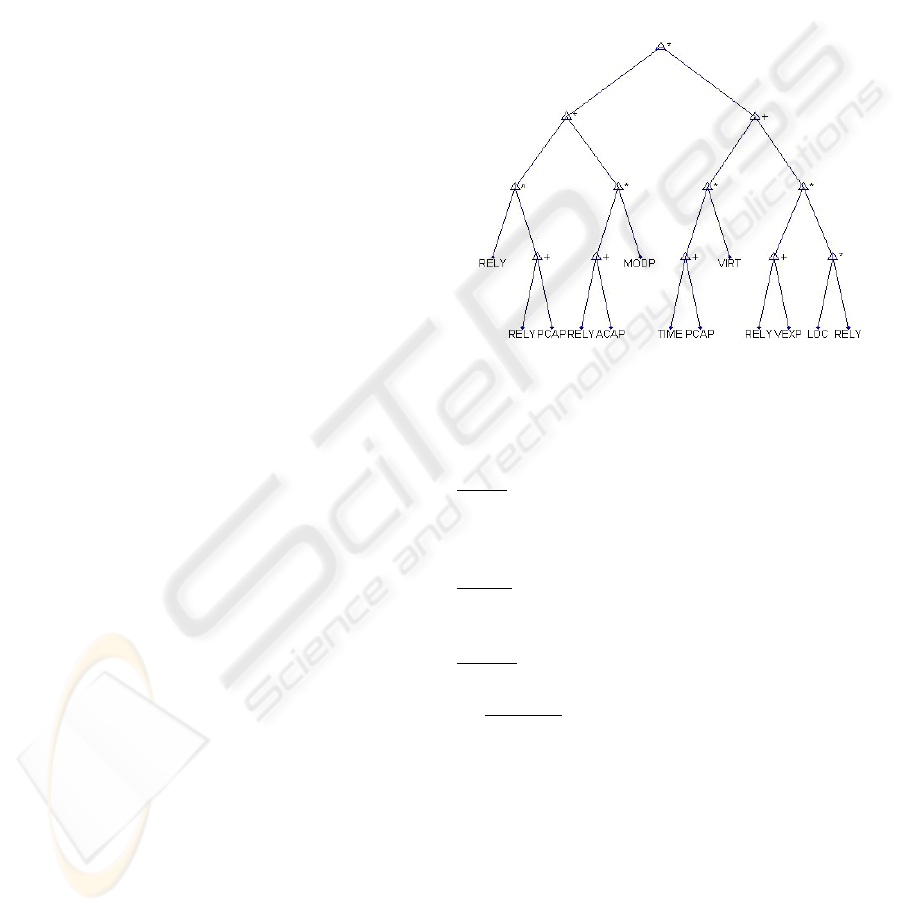
In the GP context, potential solutions in the
population are represented as parse trees (see Figure
1) and usually utilize a customized pool of
arithmetic operators for the case of input factors of
numerical nature. The GP tool used in the
experimental phase of this work is implemented in
Matlab v.7.5.0. (R2007b) and makes use of several
functions of the GPLab toolbox described in detail
in (Silva, 2007). The GPLab toolbox is a generic,
versatile and easily extendable tool for GP that
follows the concepts of Genetic Algorithms. Both
the manual and functions that form the toolbox are
available at http://gplab.sourceforge.net/. The basic
concepts are extended in this work by several new,
custom-built functions (also in Matlab scripts).
Figure 1: An example parse tree for COCOMO.
The GP steps executed during the experimental
process, along with the extended features are
described as follows:
Step1.
Use the software cost attributes of each
dataset to design and build a random population of
potential solutions (parse trees of regression
equations).
Step 2.
Execute each solution (parse tree) and assign
a fitness value to it according to how well the
solution describes the dependent variable (effort).
Step 3.
Generate new offspring in the population
using the following procedure:
Sampling
It defines the method for selecting a parent based
on which new individuals are created. The following
five variations are supported: Roulette, where a
roulette with random pointers is spun and each
individual owns a portion of this roulette. Sus, which
is based on the roulette process but here the pointers
are equally spaced. Tournament, where the parent is
chosen with a random draw of individuals and then
the best of them is selected. Lexictour, which is
based on tournament but in case of equality the
shortest individual wins. Double tournament, where
two tournaments are performed one for fitness and
one for parsimony. The sampling methods select the
A GENETIC PROGRAMMING APPROACH TO SOFTWARE COST MODELING AND ESTIMATION
283
best individuals according to a certain fitness
function (see equations (1) and (2)) to apply the
genetic operators listed below.
Crossover
Random nodes from two parents are chosen and
swapped creating two new individuals.
Mutation
A random node is chosen from a parent and
replaced with a randomly created tree. Several
different types are utilized here: Shrink Mutation, a
random sub-tree S is chosen from a parent and
replaced with a random sub-tree of S. Swap
Mutation, two random sub-trees are chosen from a
parent and swapped. Replace Mutation,
follows the
concepts of the normal mutation but with the
difference that for a certain mutation point
performed on a terminal node (i.e., a cost factor) the
terminal node is replaced by another random
operand from the available pool, whereas in the case
mutation is performed on an arithmetic operator, the
operator will be replaced by another randomly
selected operator from the available pool.
Survival
The selection of a number of individuals from
the current population and the newly created
children forms the new population.
Elitism
The best individuals of each generation are
passed to the next one unchanged. This is known as
the full (or total) elitism operator, according to
which the more fit individuals get the chance to be
part of the reproduction process throughout
generations.
Step 4.
Repeat steps 2 and 3 until the maximum
number of generations is reached. The solution with
the highest fitness value from the final population is
considered to be the result of the GP.
Initially, the data is randomly split in two sets, the
training and testing set, according to a percentage
defined by the user. The rationale behind this is to
produce cost functions (solutions) valid within a
variable and random set of training samples and then
evaluate their generalization performance with the
rest of the testing samples.
The cost equations make use of the following
arithmetic operators: add (+), minus (-), divide (/),
multiply (*), power (^), natural logarithm (log), base
2 logarithm (log2) and base 10 logarithm (log10).
Each equation-solution is evaluated according to the
default fitness equation (regfitness), which is later
modified to the fitness equation named mrefitness.
In the equations described x
act
represents the actual
value of the data sample and x
pred
the predicted one.
The regfitness fitness is defined in equation (1) and
calculates the sum of absolute differences between
the predicted and actual effort.
∑
=
−=
n
i
predact
ixixregfitness
1
|)()(|
(1)
The mrefitness fitness is equal to the MRE error
metric defined in the sum of equation (2) which is a
common performance metric used in the area of
software cost estimation. Additionally, common
performance metrics (equations (2)-(4)) are used for
evaluation. More specifically, the Mean Magnitude
of Relative Error (MMRE) is described in equation
(2) to evaluate the predictive ability of the
expression.
∑
=
−
=
n
i
act
predact
ix
ixix
n
nMMRE
1
)(
)()(
1
)(
(2)
The Correlation Coefficient (CC) described in
equation (3), measures the ability of the predicted
samples to follow the upwards or downwards of the
original series as it evolves in the sample prediction
sequence.
⎥
⎦
⎤
⎢
⎣
⎡
−
⎥
⎦
⎤
⎢
⎣
⎡
−
−−
=
∑∑
∑
==
=
n
i
npred
pred
n
i
nact
act
n
i
npred
pred
nact
act
xixxix
xixxix
nCC
1
2
,
1
2
,
1
,,
))(())((
)])()()([(
)(
(3)
The Normalized Root Mean Squared Error
(NRMSE) described in equation (4), assesses the
quality of predictions and is calculated using the
Root Mean Squared Error (RMSE). If NRMSE=0
then predictions are perfect; if NRMSE=1 the
prediction is no better than taking prediction equal to
the mean value of n samples.
∑
∑
=
=
−
−
=
n
i
n
act
n
i
actpred
xix
n
ixix
n
nNRMSE
1
2
1
2
))((
1
)]()([
1
)(
(4)
5 EMPIRICAL EXPERIMENTS
AND RESULTS
Experiments were carried out with varying
parameters, until the basic parameters of the GP
application were configured. More specifically, the
experiments were executed for a set of parameters
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
284
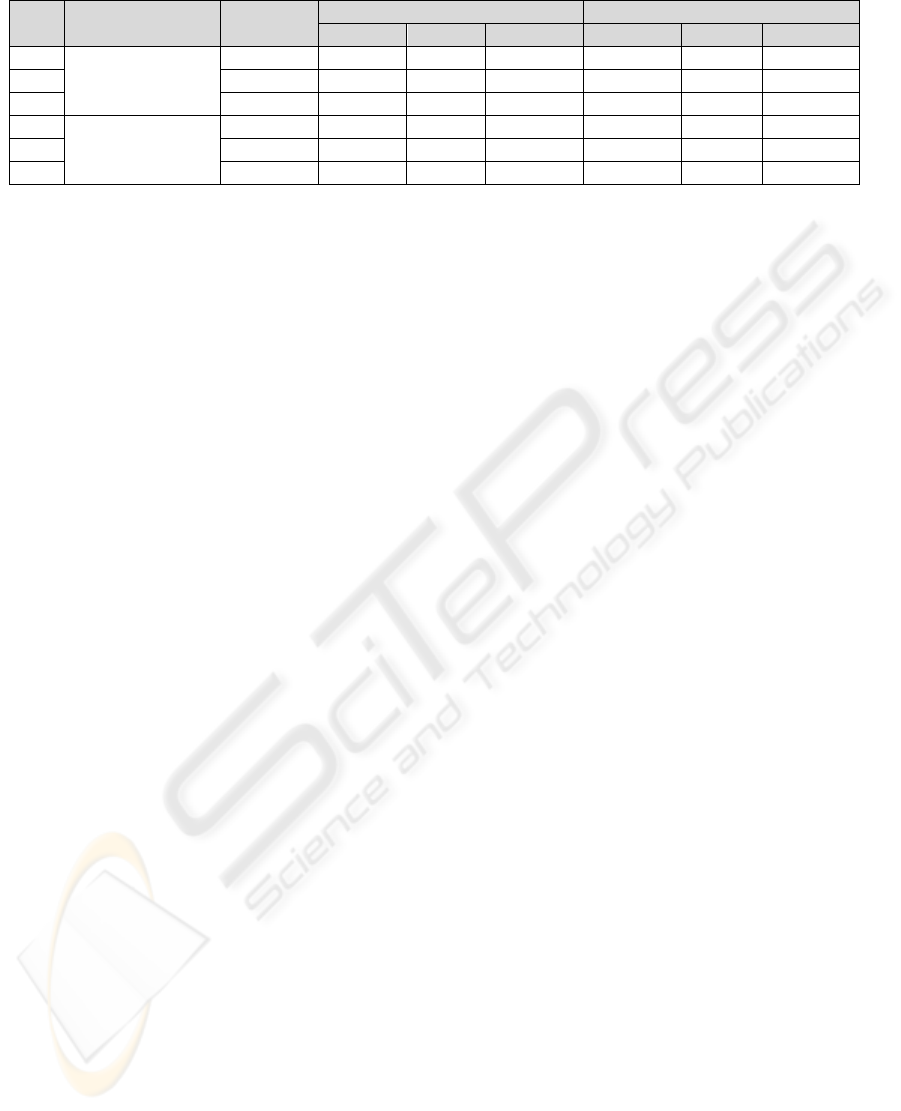
Table 1: Indicative performance results of the cost functions execution.
Rule Dataset
Depth/
Nodes*
TRAINING TESTING
MMRE CC NRMSE MMRE CC NRMSE
C
1
COCOMO
4 0.459 0.985 0.184 0.469 0.945 0.322
C
2
5 0.465 0.986 0.179 0.497 0.962 0.354
C
3
5 0.485 0.991 0.138 0.494 0.979 0.243
D
1
Desharnais
5 0.474 0.836 0.562 0.485 0.768 0.722
D
2
20* 0.520 0.799 0.606 0.521 0.731 0.684
D
3
28* 0.454 0.851 0.546 0.574 0.744 0.710
*
The superscript denotes tree size in terms of nodes
100 times aiming to create and evaluate diverse
equations. A random k-fold cross validation
procedure was executed, using the percentage of
80% of the historic data for constructing the solution
tree (training) and the remaining samples (20%) for
testing the prediction accuracy of the solution
(evaluation). The GP was employed on a population
of size 100 individuals and was evaluated for a
maximum of 350 generations.
Furthermore, specific parameters were selected
to create tree-structured equations that avoid
‘bloating’. Bloating is the phenomenon presented in
GP where the tree structures expand excessively
without the analogous improvement in fitness.
Several techniques exist to control bloating that
seem to have promising results to other problems,
like for example defining tree depth size and node
number restrictions on the evolved trees (Koza,
1992), setting dynamic maximum tree depth (Silva
and Almeida, 2003), applying lexictour and
doubletour sampling methods and survival methods
based on resources (Silva and Costa, 2005). For the
results presented in this section we applied Static
Resources for Survival and Total Elitism whereas
Double Tournament was used for Sampling. The
Tree Size Based on Depth was specified to values 3,
4, 5, 6 or 7 and Based on Nodes to 16, 20 or 28. The
Tree Population Type (type of trees created in the
initial population) was Ramped Half and Half
(Balanced and Unbalanced) trees. This means that
half trees were constructed based on the Maximum
Tree Level and the other half had a random form.
This ensured that the GP produced random type
trees in the initial population. For the Fitness
Improvement (describes the way the generation can
be improved) we selected the Best-of-Mean
Population Fitness which considers the fitness value
of the best-of-run mean population fitness of the
previous generation. The Expected Number of
Children (determines the method used for
calculating the expected number of children of each
individual) was set to Absolute. Additionally, the
Dynamic Maximum Tree Depth was used to control
bloat by setting a maximum depth on trees evolved,
so that when a genetic operator produces a tree that
outruns this limit, one of the parents enters the new
population instead. The Genetic Operators of
Crossover (probability=0.3), Replace Mutation
(probability=0.2) and Crossover & Mutation
(probability=0.6) were employed. The Stopping
Condition (specifies for when the algorithm should
stop) was set to either until the maximum generation
size (set to 350) is reached, or to if the best
individual produces exact results within ± the
Fitness Hits Tolerance percentage (set to 10) of the
expected results in at least the Fitness Hits
Percentage (set to 60). Finally, once the trees of the
final generation are constructed, they are evaluated
through the set of performance metrics (equations
(2)-(4)) over both the training and testing phases.
Equations (5) and (6) express two indicative cost
functions (regression equations) obtained for the
COCOMO (C
1
) and Desharnais (D
1
) datasets
respectively.
(((LOC*SCED)^(TIME/TOOL))+
((LOC^VEXP)^(TIME*MODP)))
(5)
The derived equations have a relatively simple
form and are easily understandable by project
managers. Additionally, using the best regression
equations yielded by the GP we calculated the
predicted effort values with relative high success
(see Table 1).
((((LENGTH* LENGTH)+ENVERGURE)+
((MANAGER EXP.+POINTS AJUST.)+
(TRANSACTIONS+MANAGER
EXP.)))*((POINTS NON AJUST.-
(TRANSACTIONS+ LENGTH))))
(6)
The accuracy performance for the COCOMO
and Desharnais datasets effort prediction is around
0.45 in terms of MMRE. The results in terms of the
MMRE and CC during training and testing phases
for both datasets are similar, but in terms of the
NRMSE the figures are better in training than in
A GENETIC PROGRAMMING APPROACH TO SOFTWARE COST MODELING AND ESTIMATION
285

testing. Overall, the error rates obtained are
considered quite promising in relation to other GP
approaches on the same datasets mentioned in
relative works (e.g., Burgess and Lefley, 2001,
report best population solutions for the Desharnais
dataset: MMRE=0.379 and CC=0.824). The best-of-
run equations obtained from the GP experiments
seem to perform consistently well with insignificant
differences, indicating a promising generalization
ability over the datasets employed.
6 CONCLUSIONS
The current work utilized Genetic Programming to
derive classical regression equations applied on two
publicly available project cost datasets to provide
accurate software development effort estimations.
The main contribution of this work is the automatic
creation and exploration of a large set of different
equations represented by parse trees evaluated
through newly devised fitness functions. The
experiments showed that GP performed consistently
well and reached to constructive solutions that yield
relatively successful effort approximations. This
finding is also in agreement with observations from
other research studies that compared GP to other
techniques. More specifically, the work of (Lefley
and Shepperd, 2003) focused on comparing GP with
other techniques for cost estimation. The authors
assess the accuracy of the estimates using data
within and outside organizations (SSTF dataset) and
report that GP performs very well but requires a lot
of expertise. They also emphasize the need of
producing accurate enough and simpler equations.
Similar works using the Desharnais dataset (Burgess
and Lefley, 2001) compare techniques for predicting
effort and argue that there may be other techniques
or model characteristics (despite accuracy degree)
that should have an equal, if not greater impact upon
their selection, such as ‘transparency’ and ‘ease of
configuration’. It seems that GP can produce
relatively quite transparent solutions in the sense that
they are expressed in expressions. However, again
they mention that some expertise is required to
choose configuration values for the parameters.
The present work took into consideration the
previous suggestions and attempted to obtain
simpler and suitable equations to predict effort. A
possible limitation of this work is the specific
selection of the operands used, which were
considered expressive enough to cover the potential
solution space and not too general or narrow to
radically increase execution time or constrain the
search space. Furthermore, we imposed several
restrictions to control the effect of bloat in GP
execution in order to save on both storage space and
algorithm execution time. The experiments were
designed to give a realistic dimension to the
solutions obtained in the form of equations that can
be easily interpreted and used by project managers.
Future research steps will emphasize on utilizing
operators of categorical and numerical type and
modified fitness functions that may provide
improvements to the results of the GP. Such fitness
functions could include for example combinations of
performance metrics, parameter settings and
facilitate in achieving even better effort predictions.
REFERENCES
Albrecht, A. J., 1979. Measuring Application
Development Productivity. Proceedings of the Joint
SHARE/GUIDE/IBM Application Development
Symposium, pp. 92.
Boehm, B. W., 1981. Software Engineering Economics,
Prentice Hall.
Boehm, B. W., Abts, C., Brown, A., Chulani, S., Clark B.,
Horowitz, E., Madachy, R., Reifer, D., Steece, B.,
2000. Software Cost Estimation with COCOMO II,
Pearson Publishing.
Burgess, C. J., Leftley, M., 2001. Can Genetic
Programming Improve Software Effort Estimation? A
Comparative Evaluation. Inform. and Soft. Tech., 43
(14), pp. 863-873.
Desharnais, J. M., 1989. Analyse Statistique de la
Productivite des Projects de Development en
Informatique a Partir de la Technique de Points de
Fonction. MSc. Thesis, Université du Québec,
Montréal.
Heiat, A., 2002. Comparison of Artificial Neural Network
and regression models for estimating software
development effort. Information and Software
Technology, 44, pp. 911-922.
Holland, J. H., 1992. Genetic Algorithms, Scientific
American, Vol. 267, No. 1, pp. 66–72, New York.
Huang, S.-J., Chiu N.-H., 2008. Optimization of analogy
weights by genetic algorithm for software effort
estimation. Information and Software Technology, 48,
pp. 1034-1045.
Jørgensen, M., Shepperd, M., 2007. A Systematic Review
of Software Development Cost Estimation Studies.
IEEE Transactions on Software Engineering, 33, No.
1, IEEE Computer Press, pp. 33-53.
Koza, J. R., 1992. Genetic Programming: On the
Programming of Computers by Means of Natural
Selection, MIT Press, Massachusetts.
Lefley, M., Shepperd, M.J., 2003. Using Genetic
Programming to Improve Software Effort Estimation
Based on General Data Sets, Proceedings of GECCO,
pp. 2477-2487.
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
286

Michalewicz, Z., 1994. Genetic Algorithms + Data
Structures = Evolution Programs, Springer, Berlin.
Papatheocharous, E., Andreou, A., 2007. Software Cost
Estimation Using Artificial Neural Networks with
Inputs Selection. Proceedings of the 9th ICEIS, pp.
398–407.
Putnam, L. H., 1978. A General Empirical Solution to the
Macro Software Sizing and Estimating Problem, IEEE
Transactions on Software Engineering, 4 (4), pp. 345-
361.
Razmi, J., Ghodsi, R., M. Jokar, 2009. Cost estimation of
software development: improving the COCOMO
model using a genetic algorithm approach. Inter.
Journal of Management Practice, 3, pp. 346–368.
Silva, S., 2007. A genetic programming toolbox for
Matlab, Version 3, ECOS - Evolutionary and Complex
Systems Group University of Coimbra Portugal.
Silva, S., Almeida, J., 2003. Dynamic maximum tree
depth - a simple technique for avoiding bloat in tree-
based GP, Proceedings of GECCO, pp. 1776–1787.
Silva, S., Costa, E., 2005. Resource-Limited Genetic
Programming: The Dynamic Approach. Proceedings
of GECCO. ACM Press, pp. 1673–1680.
Xu, Z., Khoshgoftaar, T. M., 2004. Identification of Fuzzy
Models of Software Cost Estimation. Fuzzy Sets and
Systems, 145, No. 1, Elsevier, pp.141-163.
A GENETIC PROGRAMMING APPROACH TO SOFTWARE COST MODELING AND ESTIMATION
287
