
AN INVERSE SENSOR MODEL FOR EARTHQUAKE DETECTION
USING MOBILE DEVICES
Thomas Collins and John P. T. Moore
Thames Valley University, London, U.K.
Keywords:
Environmental monitoring and control, Earthquake detection, Nonlinear signals and systems.
Abstract:
We describe a sensory framework to be used for the purposes of earthquake detection using minimal cost,
accelerometer equipped, hardware units. Combining techniques from mobile robotics this model is intended to
address the current issue in the field whereby high fidelity hardware units tuned to detect specific characteristics
such as wave features and/or high fidelity event models derived from data analysis are required for such
detection. In this paper we present and contextualise the architecture under construction in addition tooutlining
the salient elements of the problem we are addressing.
1 INTRODUCTION
At the onset of an earthquake, dedicated detection
systems are capable of issuing alerts thereby provid-
ing valuable time for people further from the event
epicentre to take action to protect themselves. This is
possible as the means employed to facilitate the trans-
mission of alert information is generally faster than
the speed of seismic waves. However this capability
obviously relies on the existence of a monitoring net-
work. Within the field of earthquake engineering two
broad approaches have emerged toward the creation
of such networks. One approach consists of creating
banks of accurate units capable of detecting seismic
characteristics because they have been tuned to detect
specific characteristics such as fluctuating ambient
seismic noise level. Countries such as Japan have suc-
cessfully developed early warning systems based on
such techniques. Unfortunately it is not always pos-
sible to deploy such technology in earthquake prone
areas around the world for varying degrees of polit-
ical, technical and financial considerations. Where
such situations manifest themselves the use of com-
modity hardware as the foundation of a seismic de-
tection network is a viable alternative. This high-
lights the second domain approach which consists of
employing the distributed computing paradigm where
the individual physical nodes are typically Laptop or
Desktop computers equipped with sensors such as ac-
celerators. For example the Network for Earthquake
Engineering Simulation Cyberinfrastructure Centre
(NEESit) has utilised the accelerometers in Apple
Macintosh laptops to develop an educational and re-
search platform for measurement and recording of vi-
brations and dynamic responses. Likewise the Quake-
Catcher Network (QCN)2 links existing laptop and
desktop computers with the aim of forming a large
earthquake monitoring system.
While the availability of Laptop/Desktop based
systems does remove a number of obstacles barring
the realisation of detection systems the installations
in themselves suffer from a number of manifest prob-
lems. For example the existence of networking infras-
tructure capable of linking the individual machines,
the potential availability of technically skilled people
(or appropriate training programmes) to operate the
machines, the ability to quickly disseminate alerts is
a required component of any such system.
Our aim is to directly address this problem by
supplementing traditional Laptop/Desktop based ap-
proaches using mobile phone technology. The core
design goal is to develop a portable system which is
capable of running on constrained and resource lim-
ited hardware thereby allowing earthquake detection
in sparsely seismically-instrumented regions. There-
fore a key facet of the system is the development of a
signal processing model which does not have the dis-
tributed quantitative analysis requirementsof the Lap-
top/Desktop techniques mentioned above and is capa-
ble of operation in the context of low entropy sensory
information. In this paper we present such a model,
illustrating its core features and operational charac-
teristics, and presenting initial results illustrating the
competencies of the model and finally highlight areas
81
Collins T. and P. T. Moore J. (2010).
AN INVERSE SENSOR MODEL FOR EARTHQUAKE DETECTION USING MOBILE DEVICES.
In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pages 81-86
DOI: 10.5220/0002911800810086
Copyright
c
SciTePress

of future work.
2 SEISMIC EVENT SIGNAL
DETECTION/HANDLING
There are two broad approaches to the detection
and/or handling of seismic event signals. One ap-
proach consists of creating dedicated accurate sen-
sory units tuned to detect specific signal characteris-
tics therefore making the units capable of detecting
emergent seismic characteristics e.g. fluctuating am-
bient seismic noise level. The other approach consists
of employing knowledge based reasoning and estab-
lished signal processing techniques to derive signal
processing techniques formed from the feature analy-
sis of historical data.
Hardware based detectors use signal averaging
techniques in an attempt to achieve an optimum sig-
nal to noise ratio which is capable of determining a
true seismic event from a false positive. The ability
of such sensors is directly related to the noise model
that has been pre-determined and incorporated into
the units. Such noise models are generally formed
throughtraditional signal manipulationtechniques i.e.
the statistical analysis of an appropriate domain char-
acteristic function. However to be useful in a practical
sense this noise model must be determined for every
new installation of such the units and limits the detec-
tion threshold thereby reducing the overall effective-
ness of such units (Newmark and Rosenblueth, ).
The direct application of Machine Learning and/or
statistical techniques, typically realised in software, in
the form of knowledge-basedreasoning is an alternate
approach which provides for a level of flexibility in
the detecting of seismic activities. Such systems are
exemplified in (Hewitt, 1992; Zareian and Krawin-
kler, 2009). In this case the detection threshold as-
sociated with the system is not directly dependent on
a physical characteristic such as seismic noise level.
Rather relevant characteristics are determined through
the analysis of domain expertise in the form of histori-
cal data and knowledge acquired from human experts.
The Laptop/Desktop based systems outlined previ-
ously typically employ such techniques. The gathered
information is employed to construct an operational
model which is used to evaluate the sensory infor-
mation received from the Laptop/Desktop sensor(s).
The overall success of such approaches however is
largely dependent on characteristics such as the se-
lection of appropriate domain classifications and re-
finement/training of the derived model.
Within the context of the domain we are address-
ing the realisation of an efficient and expressive sig-
nal processing mechanism is paramount to the overall
performance of detection system. Unfortunately nei-
ther of the existing techniques outlined above are di-
rectly usable for what we need to achieve. Techniques
associated with tuned hardware units are not usable
because the hardware units we are concerned with
are standard mobile phone handsets meaning that the
modification of same would require specific technical
expertise and the availability of specialised hardware
which is not a feasible goal for the intended deploy-
ment locations. In addition the application of existing
’knowledge based’ techniques is not directly possible
because of the data requirements both in terms of con-
structing an initial model and subsequent data propa-
gation throughout the network.
From an operational perspective, any signal pro-
cessing technique must consider real time operation
as being paramount. In addition there should be no
requirement for historical knowledge. However any
such information, if available, should be easily incor-
porated into the model developed using the process-
ing technique. Finally the technique must accommo-
date low entropy sensory information.
In evaluating these requirements techniques from
a number of varied domains such as speech recog-
nition e.g. (Vargas et al., 2001), and telecoms e.g.
(Murooka et al., 2001) and mobile robotics e.g.
(Ehlers et al., ) were considered. After domain eval-
uation we determined that the problem that is closest
to the problem we are addressing in developing our
signal handling model is the field of Occupancy Grid
based robotic mapping.
3 MOBILE ROBOTIC MAPPING
Within the field of mobile robotics a key concern is
providing the robot with the ability to acquire a model
of its operating environment as this model is required
for the safe and productiveoperation of the robot. The
actual performance of the robot in acquiring a mean-
ingful spatial model of its operating environment de-
pends greatly on its capability to quickly evaluate
the potentially erroneous information received from
its sensors. As it operates in the environment, the
robot gathers sensory information and subsequently
incorporates this into a representation of the envi-
ronment. Occupancy Grids have become the dom-
inant paradigm for environmental modelling in mo-
bile robotics because of their operational characteris-
tics (Kortenkamp et al., 1998) . The creation of these
Occupancy Grid maps is a non trivial process as the
robot has to interpret the findings of its sensors in or-
der to make deductions regarding the state of its en-
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
82
vironment. This is facilitated by the use of a sensor
model which is a means of interpreting received sig-
nals through perceptual channels. In occupancy grid
based robotic mapping there are largely two types of
sensory model; the Inverse Model and the Forward
Model(Collins et al., 2007). In the context of our re-
quirements the inverse approach is currently most ap-
plicable. This is because it facilitates iterative real
time operation without any requirement for historical
knowledge and facilitates operation with low entropy
sensory information.
4 PHYSICAL ARCHITECTURE
A key design goal is to produce a portable system
which is able to run on constrained hardware. Al-
though the target device for the prototype is a mobile
phone it is envisaged that the software could run on
other more limited embedded devices. The overall de-
sign of the prototypecan be split into specific problem
domains involving obtaining the data, communication
of the data, encoding of the data and processing of the
data on the device itself.
4.1 Obtaining the Data
While movement will be detected by the accelerom-
eters contained within the device, an initial deci-
sion is how often to sample this movement and how
many samples are needed before we process the data.
Once we have accumulated sufficient samples this
data needs to be analysed to decide whether or not we
think an adequate amount of shaking or movement is
taking place. Studies of accelerometer data include
calculating and using the covariance of the values ob-
tained (Ravi et al., 2005). For the prototype currently
in development we take the covariance of our X,Y
sample data using equation 1.
covar = (1/(n−1))
n
∑
i=1
(x
i
− ˆx)(y
i
− ˆy) (1)
We then compare this covar result with a predeter-
mined threshold value. If it exceeds this threshold we
must then communicate our findings to other clients.
4.2 Communicating the Data
The first challenge to overcome is deciding how to
broadcast or share data between multiple connected
devices in a scalable way. The Spread Toolkit offers
an open source solution based on a shared message
bus. It has been optimised to provide efficient mes-
sage exchange with the ability to guarantee delivery
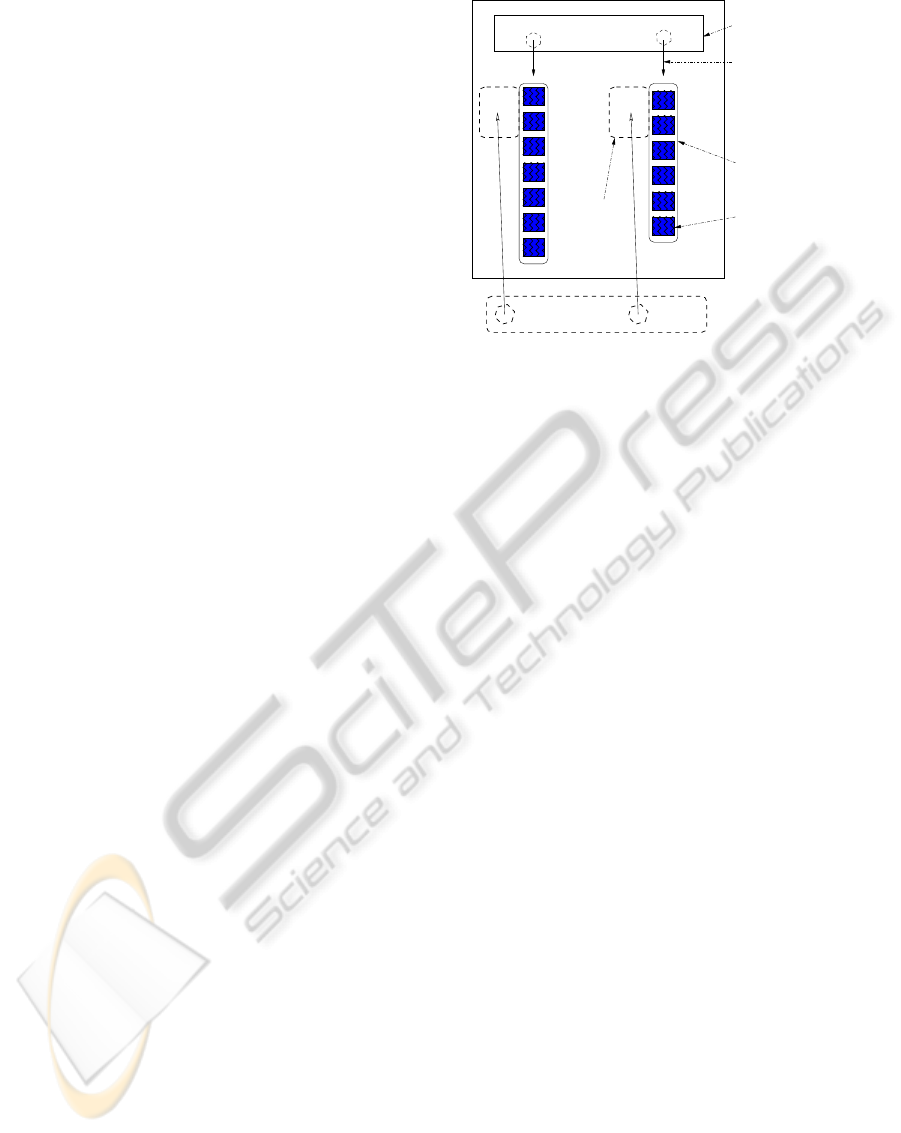
Determined Client
Confidence Store
Client Event Information
Individual Event Aspect
Dynamic Client Reference Table
Unique Client Reference
(Full Queue Depicted)
Dynamic Client confidence Table
Figure 1: Device architecture.
and ordering of messages if required. To improve
performance we will use unreliable communication.
Each mobile client connects to an individual Spread
daemon using a uniquely generated id. In addition,
Spread daemons can be connected together to form a
larger shared single communication bus where Spread
daemon 1 connects to Spread daemon n.
4.3 Processing the Data on the Device
All messages received by a single client will be
queued for a specific period of time. Thus, the number
of independent queues created reflects the number of
unique clients who have transmitted messages within
the sampling time period. Processing the queues in-
volves examining the number of queues at time t as
well examining their queue length. If the number of
queues is below a certain threshold or the mean queue
length is below a certain threshold we can reset all
queues and wait for the next sampling period before
repeating the process. Otherwise, we need to pro-
cess the data in the queues. For the prototype each
queue contains data representing a covariance value
v obtained from the accelerometer data. Each queue
will have an independent scalar value representing a
confidence level k. Applying k(v
1
,v
2
,.. .,v
n
) yields
(kv
1
,kv
2
,.. ., kv
n
) for each queue. Summation of
these queue vectors will provide a simplistic overview
of whether or not we suspect an earthquake is taking
place. Each time the queues are processed they are
cleared ready for the next sample. A key challenge
will be deriving an accurate confidence scalar value
for each queue. This will ultimately need to take into
account historical data between sampling cycles.
All software used or written needs to be portable
and able to run on ARM and MIPS based hardware.
The software must also operate within the constraints
AN INVERSE SENSOR MODEL FOR EARTHQUAKE DETECTION USING MOBILE DEVICES
83

of the target device. The hardware used for the pro-
totype is the Openmoko Freerunner
1
. Significant fea-
tures of the device include its accelerometers, WiFi
and GPRS. The ability to test over a GPRS connec-
tion will be important as it may not be possible to ac-
cess a wireless access point or there may not be a 3G
network available. Therefore being able to concisely
encode data for communication across Spread will be
essential. Regardless of the connection we also want
network communication to be light-weight in terms of
processing load. This eliminates standard approaches
such as structuring packets with XML data (Moore,
2007).
5 SEISMIC DETECTION MODEL
From an operational perspective the architecture we
are in the process of realising operates as follows.
Each device begins an operational cycle by populat-
ing its client event queue through taking in data prop-
agated from the various other devices in the network.
This per queue information must then be used as the
basis for determining the whether or not an event may
be happening. This problem is far from trivial as each
queue is subject to a potentially different and non de-
terministic sampling rate meaning that it is the in-
direct information contained within the queues that
must be used. In addition each device will have an in-
dependent view of the problem meaning that it is not
possible to directly rely on device interdependency
characteristics.
5.1 Client Queue Information
As a device can only determine information about the
operating environment indirectly through its sensor(s)
and the information propagated from its peer units the
determination of a world model is an applied exam-
ple of an estimation theory problem (Thrun, 2002).
Therefore to facilitate the interpretation of the data
provided from a client event a probabilistic sensor
model of the form p(r|z) is used. This model facil-
itates the derivation of the individual client event con-
fidence values v, mentioned previously in section 4.
Therefore:
v
i
= p(r
i
|z
i
)
where the model we use in this prototype is based
upon the characteristics outlined previously in section
4.3. This model relates the client event reading r to
the true event state z. This density function is sub-
sequently used in a Bayesian estimation procedure to
1
http://openmoko.com
determine the event state probabilities. Finally a de-
terministic world model is employed to facilitate the
derivation of a optimal world estimator which can be
propagated between the individual units that form the
world state.
A classical Bayesian approach is used for the deter-
mination of the per queue confidence score. Given
the current estimate of the state of clientC
i
, p[s(C
i
) =
SE|{r}
t
] based on the observations r
i
= r
1
,.. ., r
t
and
given a new client observation r
t+1
the new state esti-
mate is provided by
k = p[s(C
i
) = SE|{r}
t
+ 1] = (2)
p[r
t+1
|S(C
i
) = SE]p[S(C
i
) = SE|{r}
t
]
∑
s(C
i
)
p[r
t+1
|s(C
i
)]p[s(C
i
)|{r}
t
]
In the above the previous estimated value of the client
state p[S(C
i
) = SE|{r}
t
] serves as the prior and is ob-
tained directly from a localised representation of the
global state. The new state of a particular client. de-
termined through the above, is subsequently stored in
this representation and propagated to the world.
To facilitate prior estimation for client state a simpli-
fied one dimensional Gaussian estimator model is em-
ployed.
p(r|z) =
1
√
2πσ
exp
−(r−z)
2
2σ
2
(3)
5.2 Inter Device Confidence Regions
As presented above the sensor model is a one di-
mensional construct associated with a determined or
evaluated distance between client devices. Therefore
the model can be considered a client information axis
from the one dimensional viewpoint. While useful
for determining information relating to the 1-1 spatial
mapping directly between the devices the model can-
not consider areas outside of this conceptual spatial
line. It is conceivable that the spatial area between a
host device and its client will is also an area of inter-
est. In particular it would be beneficial to have the
ability to model a region of confidence emanating di-
rectly from the host device to the immediate vicinity
of the client device.The basic premise of this concept
is outlined in figure 2. When extended in this manner
the probabilistic model approaches more closely the
type of robotic mapping inverse sensor model high-
lighted previously. The extended model can be spec-
ified as equation 4 where Q is the angle associated
with the created confidence region.
p(r|z, Q) =
1
2πσ
r
σ
Q
exp
"
−
1
2
(r−z)
2
2σ
r
2
+
Q
2
σ
2
Q
!#
(4)
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
84
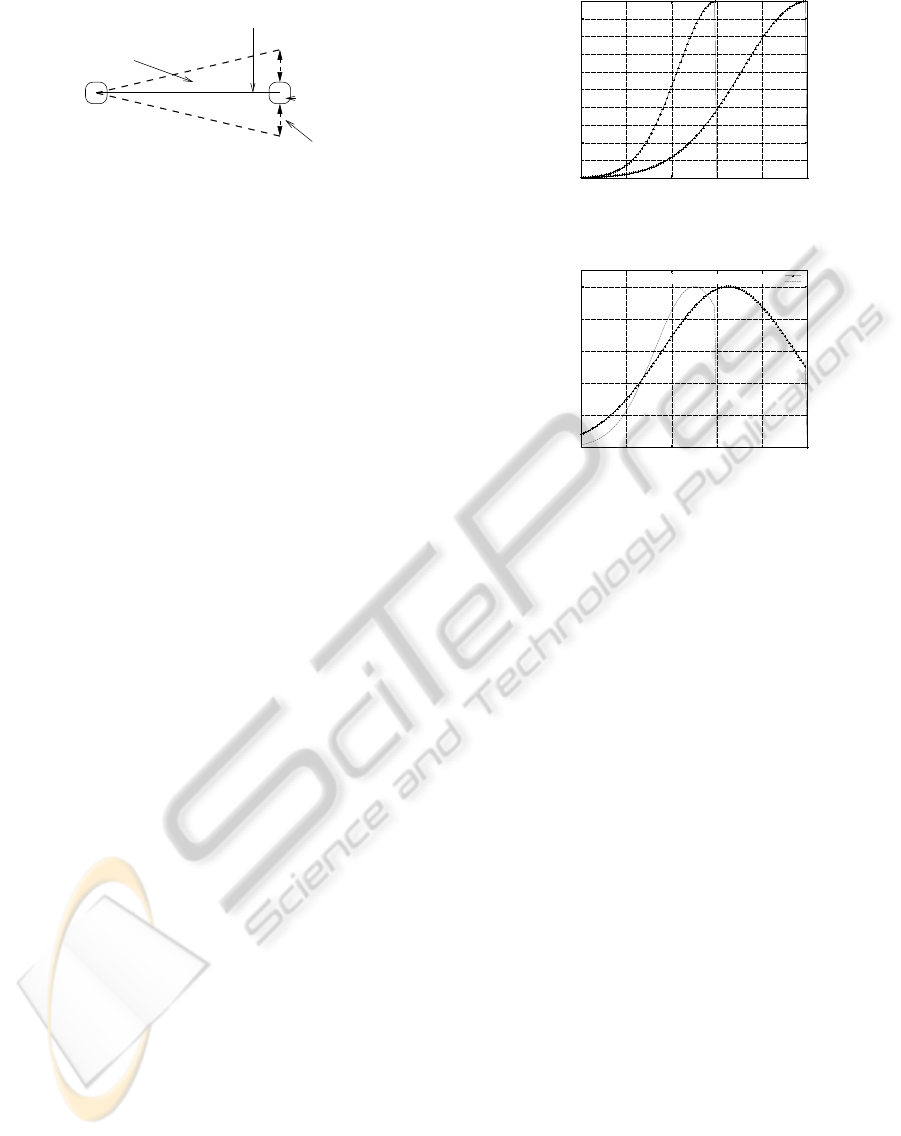
Client
Device
Distance of interest
from client device
Client information axis
(single dimension model)
Device 1
Confidence region
Figure 2: Creating a confidence region between devices.
The availability of these inter device confidence re-
gions will provide for a more information rich profile
of the event to be computed. In addition the over-
lapping of such regions will provide for the ability of
assessing and verifying the information coming from
individual clients thus adding a novel dimension to
the client confidence estimation.
6 MODEL CONSIDERATIONS
As the architecture evolves the consideration of sen-
sory units or other sources of relevant information is
necessary. These considerations are highlighted here.
6.1 Client Event Information
At its core the actual sensor model is a statistical es-
timation formulation which interprets relative range
information received from peer devices. Upon the ac-
tivation of a devices sensors an event signal is prop-
agated through the network. The determination of
realistic events on a device versus false positives or
false negatives is a separate problem to the data sig-
nal handling the sensor model is designed to consume
and hence an exposition of same is outside the scope
of this context. When an event signal is received the
sensor model calculates a probabilistic profile for the
event. To illustrate, consider the ideal scenario where
a device receives notification of an event from a peer
device at what is determined to be at distances of
60km and 100 km respectively from the device. The
associated probabilistic profiles determined through
the model are outlined in figure 3 where it can be
seen that the model is Gaussian in nature. In terms
of the device architecture each profile corresponds to
a single component of an event queue. The preceding
example presented the model in the ideal scenario of
there being a 1-1 correspondence between the physi-
cal devices distance and the actual distance the infor-
mation has been determined to travel. In real world
settings such an assumption cannot be guaranteed.
The model takes cognisance of this fact by its nature
as illustrated in figure 4.
0.0000
0.1000
0.2000
0.3000
0.4000
0.5000
0.6000
0.7000
0.8000
0.9000
1.0000
0 20 40 60 80 100
Event Likelihood
Distance
Figure 3: Event profiles for hypothetical distances of 60km
and 100km respectively.
0.0000
0.2000
0.4000
0.6000
0.8000
1.0000
0 20 40 60 80 100
Event Likelihood
Distance
Peer device determined at 65km, actual 100km
Peer device determined at 50km, actual 60km
Figure 4: Event profiles in the context of non ideal peer
device distances. Hypothetical actual distances are 50km
and 65km respectively.
6.2 Information Source Integration
To increase the capability of any such system in gen-
eral requires that multiple sources of information can
be incorporated into a single, useful, information
source. This is known as the data fusion problem. Fu-
sion processes are frequently categorised as low, in-
termediate or high, depending on the processing stage
at which fusion takes place(Klien, ). Lowlevel fusion,
(Data fusion) combines several sources of raw data to
produce new raw data. The expectation is that fused
data is more informative and synthetic than the orig-
inal inputs. Within the context of multi-device seis-
mic detection this integration can be performed using
a formulation such as that outlined in equation 3 to
combine the estimates provided by the independent
clients. For two clients C
1
and C
2
this means using
the associated client data models p
1
(r|z) and p
2
(r|z)
as the basis for determining the associated combined
probability and subsequently applying an appropri-
ate normalisation across the state encapsulated in the
client confidence table illustrated in figure 1.
7 CONCLUSIONS AND FUTURE
WORK
In this paper we have detailed a sensor modelling
framework for earthquake detection using mobile de-
AN INVERSE SENSOR MODEL FOR EARTHQUAKE DETECTION USING MOBILE DEVICES
85

vices which is used within the context of a novel seis-
mic event detection architecture. The sensor model
outlined is a probabilistic one Gaussian in nature and
similar to the inverse sensor models prevalent in the
robotic mapping field. As such it is capable of in-
crementally and efficiently interpreting event signals
propagated throughout the network without the need
for predetermined models or sensor associated seg-
mentation decisions. For example the characterisa-
tion highlighted in section 6 illustrated that meaning-
ful client event evaluation is possible with a minimal
of information i.e. an event notification and a client
distance estimate.
In terms of future work regarding the model and
its usage a number of areas are prevalent. The choice
of an inverse sensor model has some specific impli-
cations. Because of its theoretical basis the disam-
biguation and analysis of client event data is achieved
primarily through the use of additional sensing. This
has performance implications which need to be ad-
dressed. Another area of future work is determining
appropriatecharacteristics for the extension of the one
dimensional sensor model to two dimensions. The at-
tribute of interest here is determining a meaningful
distance of interest from a client device. To address
this problem we initially propose to employ simple
heuristic values determined from operational experi-
ence. Our long term aim however, is to facilitate the
automated derivation of the distance of interest, using
triangulation between clients. The evaluation of re-
ceived client events to determine the true likelihood
of an actual earthquake event as opposed to user di-
rected movement is another area of future research.
Benchmarking the detection ability of our technique
and subsequent model refinement is also an obvious
area of future work. Toward this end we intend to cor-
relate our detection results with actual real earthquake
data obtained from national earthquake centres and
the Stanford Quake-Catcher Network. Finally within
the context of the project as a whole another impor-
tant area of future work will be the specification of
a meaningful benchmarking technique, applicable to
the domain, to facilitate direct quantitative compari-
son between techniques such as ours and natural lan-
guage centric techniques such as the U.S. Geological
Surveys Twitter Earthquake Detector (TED)
2
.
REFERENCES
Collins, T., Collins, J., and Ryan, C. (2007). Occupancy
grid mapping: An empirical evaluation. In Proceed-
2
http://recovery.doi.gov/press/us-geological-survey-
twitter-earthquake-detector-t ed/
ings of Mediterranean Conference on Control and Au-
tomation.
Ehlers, F., Gustafsson, F., and Spaan, M. Signal processing
advances in robots and autonomy. EURASIP J. Adv.
Signal Process, 2009.
Hewitt, C. (1992). Open information systems semantics for
distributed artificial intelligence. Foundations of ar-
tificial intelligence Special Issue of ’Artificial Intelli-
gence’ Series, pages 79–106.
Klien, L. Sensor and data fusion: A tool for information
assessment and decision making. SPIE Press.
Kortenkamp, D., Bonasso, R., and Murphy, R. (1998). AI-
based Mobile Robots: Case studies of successful robot
systems.
Moore, J. P. T. (2007). Thumbtribes: Low bandwidth,
location-aware communication. In Obaidat, M. S.,
Lecha, V. P., and Caldeirinha, R. F. S., editors, WIN-
SYS, pages 197–202. INSTICC Press.
Murooka, T., Takahara, A., and Miyazaki, T. (2001). A
novel network node architecture for high performance
and function flexibility. In ASP-DAC, pages 551–557.
Newmark, N. and Rosenblueth, E. Fundamentals of earth-
quake engineering. Prentice-Hall.
Ravi, N., Dandekar, N., Mysore, P., and Littman, M. L.
(2005). Activity recognition from accelerometer data.
In IAAI’05: Proceedings of the 17th conference on In-
novative applications of artificial intelligence, pages
1541–1546. AAAI Press.
Thrun, S. (2002). Robotic mapping: A survey. In Lake-
meyer, G. and Nebel, B., editors, Exploring Artifi-
cial Intelligence in the New Millenium. Morgan Kauf-
mann.
Vargas, F., Fagundes, R. D., and D. Barros, J. (2001). Sum-
marizing a new approach to design speech recognition
systems: A reliable noise-immune hw-sw version. In-
tegrated Circuit Design and System Design, Sympo-
sium on, 0:0109.
Zareian, F. and Krawinkler, H. (2009). Simplified perfor-
mance based earthquake engineering. Technical re-
port, Stanford University.
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
86
