
DESIGN AND EXPERIMENTAL VERIFICATION OF
POWER-ASSISTED SMART DOOR SYSTEM FOR PASSENGER
VEHICLE
Kum-Gil Sung, Min-Kyu Park
School of Mechanical and Automotive Engineering Technology
Yeungnam College of Science and Technology, Daegu 705-703, Korea
Byoungsoo Lee
Department of Mechnical and Automotive Engineering, Keimyung University, Daegu 704-701, Korea
Keywords: Smart Door, Power-assist, Passenger Vehicle, Human Friendly.
Abstract: In this study, to enhance the ease of opening and closing the doors of the passenger vehicle, a smart door
with a power assist mechanism consisting of a motor and clutch was developed and tested. A power assist
mechanism mounted within the vehicle’s door is proposed and modeled. The required force necessary to
control the designed mechanism during the vehicle’s roll, pitch and the opening angle of the door has been
established. Finally, the improvement in the ease of opening and closing doors by utilizing the designed
ower assist mechanism was tested and proven through an experimental verification.
1 INTRODUCTION
Recently, in the automotive industry, research in
creating intelligent parts by integrating various
functions is actively conducted. The developed
technologies are being commercialized rapidly in
North America, Europe, and Korea. Among such
intelligent parts, auto sliding door and electric power
door systems are developed for doors of vehicles
(
Yoon, 2002, Grujicic, 2009). However, in most of the
conducted research and products in the process of
commercialization, studies on mechanisms for
compensating changes in the necessary force to open
and close doors of a vehicle parked at an angle is
limited.
Depending on the structure, shape, and opening
& closing force of the vehicle’s door, the perceived
convenience and safety by the user is affected
greatly and it is very frequently used by passengers.
Thus, when the door does not operate as intended by
the passenger, the inconvenience is drastically felt.
Traditionally, a part called the door checker which is
attached between the door and the vehicle frame
prevented the door from opening instantaneously
when the vehicle is parked at an angle.
However, in limited space or when the vehicle is
parked at an angle forward or sideways due to the
weight of the door it will not become stationary at
the passenger’s desired position. Therefore, a new
power-assist smart door which adjusts the opening
and closing force depending on the roll and pitch
angle of the vehicle is suggested. It utilizes a motor
and clutch to power-assist the passenger while
opening or closing the door of the vehicle. When
this system is used no matter how the vehicle is
positioned the door can be conveniently opened or
closed without exerting oneself. The convenience of
this kind of a system becomes more important when
the weight of the door is heavy or for large
passenger vehicles. In order to commercialize such a
power-assist smart door system, in depth research in
various areas such as power assist mechanism,
controlling the opening and closing force,
mechanism for understanding the intention of the
passenger, dedicated motor and clutch development
must be conducted. Among these, for developing the
power-assist equipment, the mechanism for
understanding the passenger’s intention when
getting on or off the vehicle and to actively control
the necessary force to open or to close the door must
382
Sung K., Park M. and Lee B. (2010).
DESIGN AND EXPERIMENTAL VERIFICATION OF POWER-ASSISTED SMART DOOR SYSTEM FOR PASSENGER VEHICLE.
In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pages 382-386
DOI: 10.5220/0002941703820386
Copyright
c
SciTePress
be organized.
In this study, to enhance the ease of opening and
closing the doors of the passenger vehicle, a smart
door with a power-assist mechanism consisting of a
motor and clutch is developed and a smart door with
this mechanism will be designed. A power assist
mechanism which can be mounted inside the door is
suggested and modeling of a vehicle door with this
mechanism conducted. Based on this, a power assist
mechanism which is suitable for passenger vehicle is
designed. A computer simulation is used to derive
the necessary force to open or close the door for a
given door opening angle at a given vehicle roll or
pitch angle.
2 MODELING OF SMART DOOR
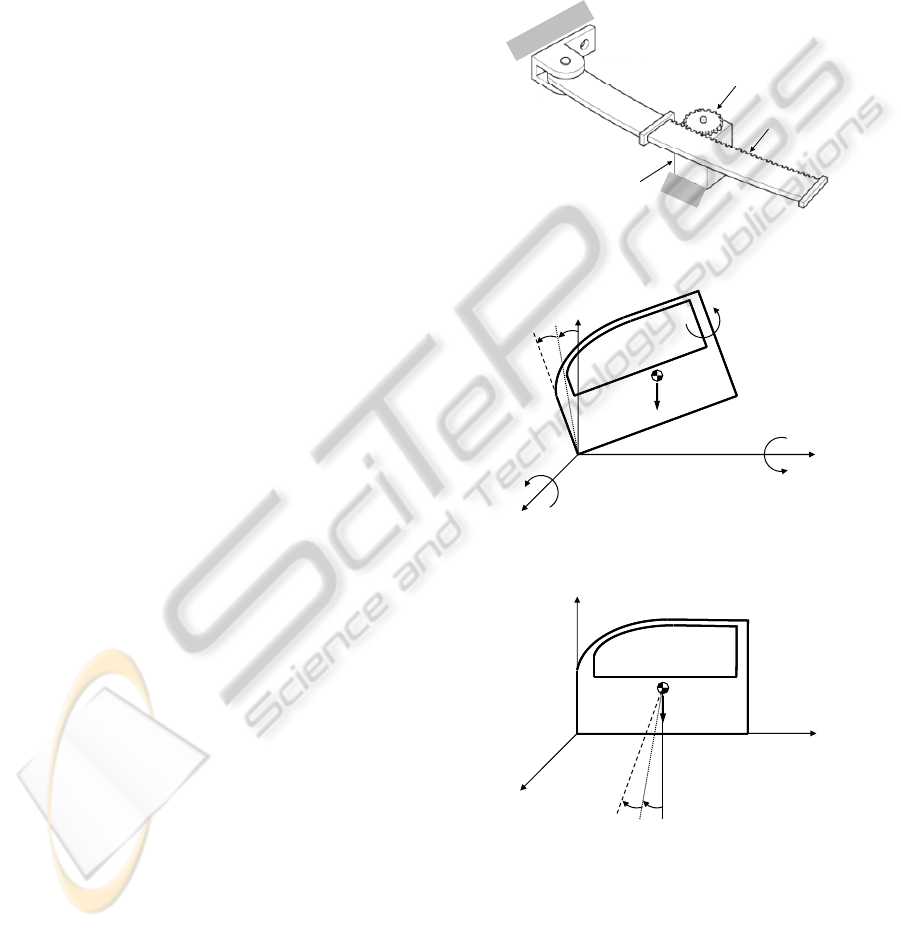
An illustration of the new power assist smart door
which can alter the necessary force to change the
force required to open or close the door when the
vehicle is parked at a roll or pitch angle is provided
in Figure 1. It consists of a rack and pinion, a clutch,
and a reduction gear and motor. When this
mechanism is applied, even when the vehicle is
parked at an angle, the necessary force required to
open or close the door will be the same as if the
vehicle is parked on a flat level surface.
To establish the equation of motion for the
power-assist mechanism attached smart door, in the
model, as shown in Figure 2, the degrees of freedom
was established by the roll
x
and pitch
z
angle of
the vehicle and the angle of the door opening
. The
equation of motion is derived based on moment
from the weight of the door and the assumption that
the external force generated moment by the power
assist mechanism.
Initially, as indicated in Figure 3 to obtain the
moment of the door due to its own weight, it is
assumed that the roll and pitch angle of the vehicle
frame is fixed and that the roll and pitch
angle(actually the reverse direction of the vehicle
frame angle) is created relative to the gravity vector.
Thus, the moment by the door’s own weight
g
T
~
can
be summarized as the following.
rotgg
gmrT
~
~
~
(1)
Here,
rot
g
~
is the rotated gravity vector caused by
the roll and pitch angle and can be represented as
equation (2).
x
xz
xz
rot
g
g
g
g
sin
sincos
cossin
~
(2)
When equation (1) is reorganized by the y
directional component, the moment in the y
direction by the weight of the door becomes the
following equation.
V
e
h
i
c
l
e
B
o
d
y
D
o
o
r
Clutch, Reduction Gear
and Motor
Rack
Pinion
Figure 1: The configuration of the power-assist
mechanism for the proposed smart door system.
x
z
y
m
g
z
z
x
x
Figure 2: Coordinates for the dynamic model.
x
z
y
m
g
z
x
Figure 3: Gravity vector considering the roll and pitch
angle of vehicle body.
xxzgyg
mgrT
sincoscossinsin
(3)
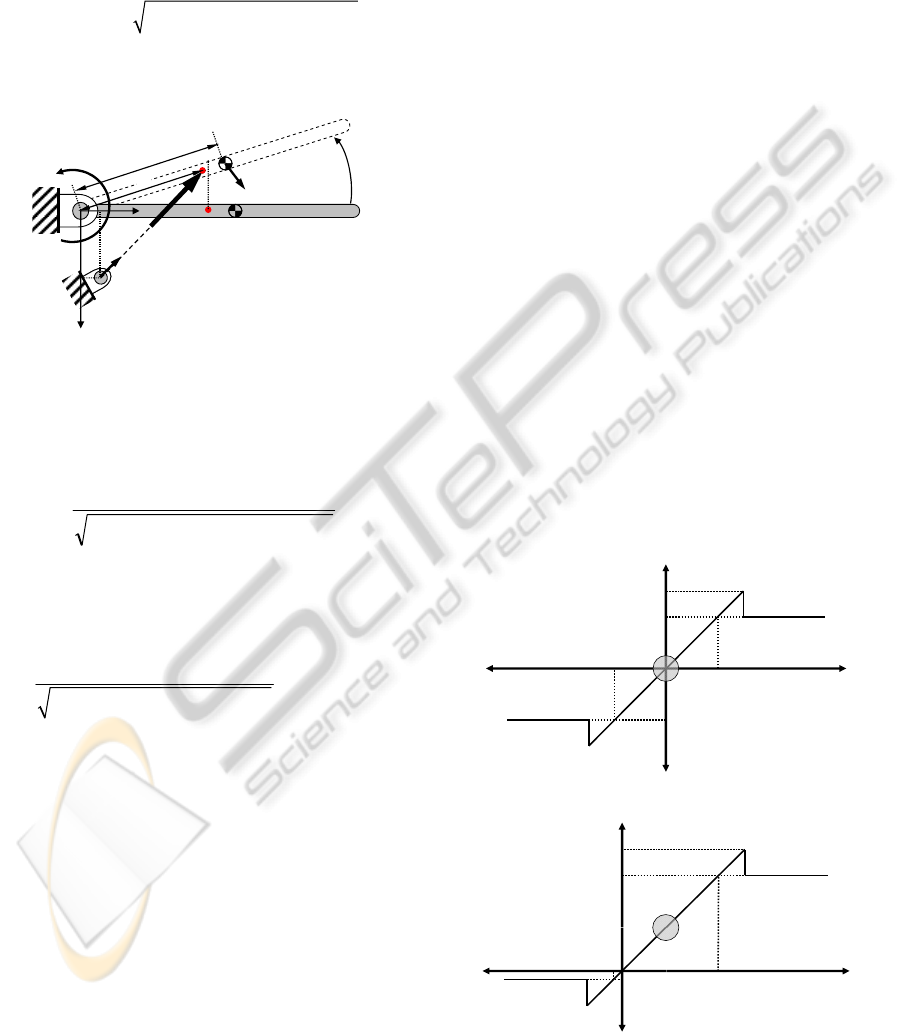
Next, as indicated in Figure 4 the moment of the
door
F
T
~
created by force of the power assist
mechanism(
F
) is arranged as equation (4).
DESIGN AND EXPERIMENTAL VERIFICATION OF POWER-ASSISTED SMART DOOR SYSTEM FOR
PASSENGER VEHICLE
383
tgF
erFFrT
~
~
~
~
~
(4)
Here,
t
e
~
is the directional unit vector created by the
power assist mechanism and can be represented as
the following.
2
2
cos
0/cos sin
sin
x
txz
z
r
err
r
(5)
The following equation is the rearrangement of
m
r
g
r
~
F
~
z
z
x
x
rot
g
~
Fg
TT
~
,
~
t
e
~
t
~
Figure 4: Free body diagram for dynamic model of the
proposed smart door system.
the moment in the y direction of the door caused by
the power assist mechanism from equation (4).
22
sincos
cossin
zx
zx
yF
rr
rF
T
(6)
When equation (2) and (6) is applied to the
equation of motion it becomes the following.
22
(sin cos)
(cos ) (sin )
(sin sin cos cos sin )
yFygyfric
xz
xz
g
zx xfric
JcTTT
rF
rr
rmg T
(7)
Here,
y
J
is the mass moment of inertia in the
y direction,
c
is the damping coefficient of the door
hinge, and
fric
T is the frictional force that occurs
when the door opened or closed.
3 DESIGN AND MANUFACTURE
OF SMART DOOR
In order to design the power assist mechanism which
will be actually mounted in the vehicle, it becomes
necessary to estimate the maximum force necessary
to open or close the door of the vehicle when it is in
a pitch or roll position. Depending on the door
opening position the desired control force
des
F must
be estimated. In this mechanism, the maximum force
needed to open or close the door during a vehicle’s
pitch or roll position can be measured
experimentally, however, the required control force
of the mechanism must be set up depending on the
pitch, roll, and door angle. As indicated in Figure 5,
in this research, to set up the control force of the
pitch, roll, and door opening angle the respective
dynamic frictions
1
F and
2
F have been measured.
Then the average value has been calculated and the
control force has been set up as shown in Figure 6.
Thus, as shown in Figure 5(a) only the forces needed
to open or close the door when the vehicle is on
level ground(
des
FF
1
and
2
FF
des
) is required for
vehicle in a slanted position as indicated on Figure
5(b).
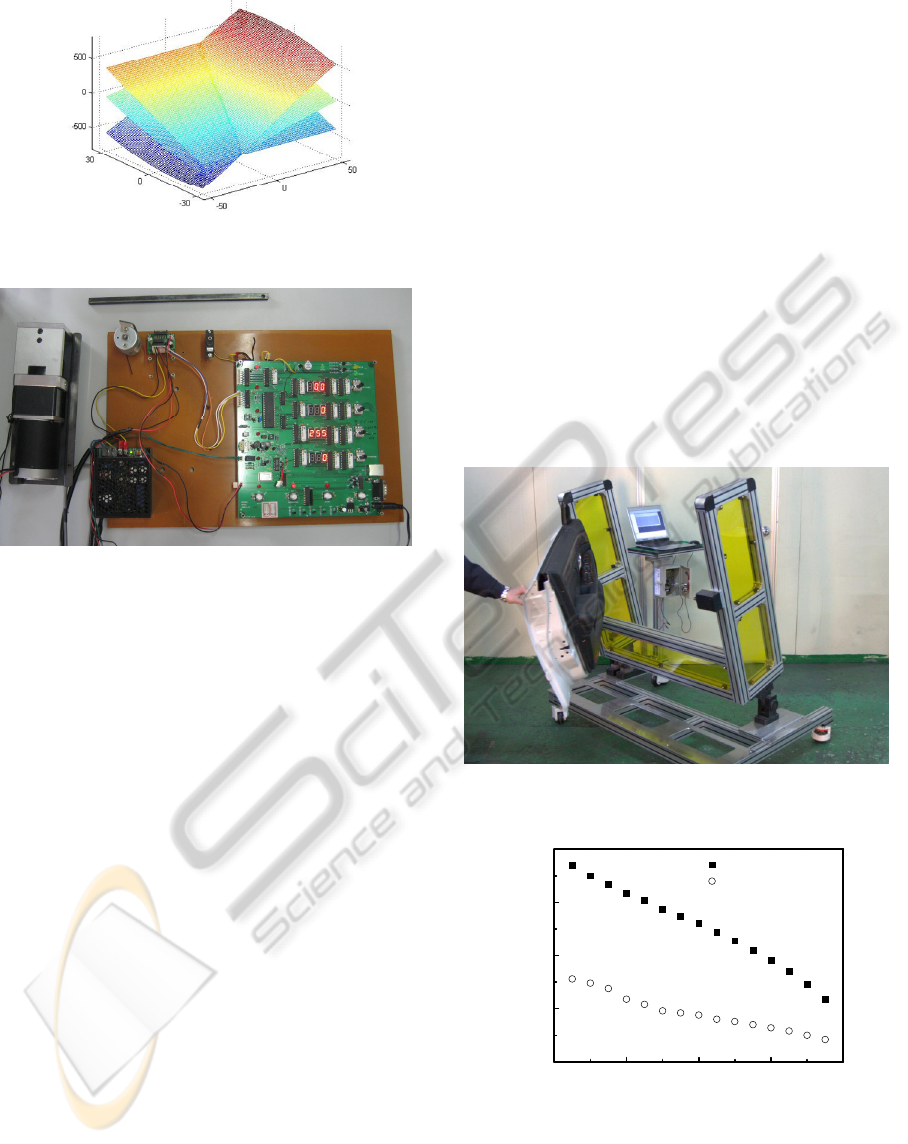
The required control forces for roll
x
, pitch
z
,
and door opening angle
are within the range of -
30~30
°, -50~50° and 0~80° respectively as shown
in Figure 6. As it can be verified from the results the
required maximum control force is approximately
1486.3N.
In this study the maximum required control force
is used as the boundary condition for the design and
the motor, reduction gear, rack and pinion, and
selection of parts were conducted.
des
F
F
1
F
Kinetic
Friction Force
Friction Force
2
F
Static
Friction Force
(a) case I (flat road)
F
1
F
Kinetic
Friction Force
Friction Force
2
F
Static
Friction Force
des
F
(b) case II (slope road)
Figure 5: The desired actuating force with respect to the
vehicle body angle.
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
384
R
o
l
l
A
n
g
e
l
P
i
t
c
h
A
n
g
l
e
Desired Force
D
o
o
r
O
p
e
n
A
n
g
l
e
=
0
°
4
0
°
8
0
°
Figure 6: The required control force characteristics for
designing power-assist device.
Figure 7: Power-assist mechanism control board.
In order to manufacture a suitable smart door, the
door of an actual vehicle has been measured and the
parameters are indicated. Based on these values, a
control block diagram to control the smart door
system is structured. The power assist mechanism
control board is shown in Figure 7 and it is attached
to the smart door system.
4 EVALUATION OF SMART
DOOR
To test and evaluate the designed smart door, the test
set up indicated in Figure 8 is constructed. An actual
door of a passenger vehicle is attached to the frame.
This frame can be set up in a vehicle roll position.
The force generated by the power assist system is
controlled by the computer D/A signal, the vehicle
roll angle
x
, door opening angle
, and angular
velocity
are measured by using sensors.
In order to investigate the characteristics of the
smart door system, the roll angle of the vehicle was
set at 15
° as indicated in Figure 8 and the required
opening and closing forces are actually measured.
As it can be found from the experiment in Figure 9
when the door opening angle is adjusted between
0~80
° if the power assist mechanism is not
activated, the necessary force is 60~180N. But when
the power assist mechanism is activated
approximately 20~80N was required to open or
close the door.
5 CONCLUSIONS
In this study, to enhance the ease of opening and
closing the doors of the passenger vehicle, a smart
door with a power assist mechanism consisting of a
motor and clutch was developed and tested. For this
purpose a power assist mechanism which can be
mounted inside the door is suggested and the smart
door is modeled and tested. The required control
force for controlling the mechanism due to the
vehicle’s pitch, roll, and door opening angle is
established.
Figure 8: Experimental setup for the power-assisted smart
door system.
0 20406080
0
50
100
150
200
w/o power-assist
with power-assist
Force (N)
Door O
p
en An
g
le
(
de
g)
Figure 9: The control responses of the smart door system.
Based on the established results the power assist
mechanism with the adequate opening and closing
force was designed. A computer simulation was
used to evaluate the designed power assist
DESIGN AND EXPERIMENTAL VERIFICATION OF POWER-ASSISTED SMART DOOR SYSTEM FOR
PASSENGER VEHICLE
385

mechanism. The designed power assist mechanism
installed smart door will be mounted on a vehicle
and will be tested in the near future to prove the
usefulness and convenience of the system.
REFERENCES
Grujicic, M., Arakere, G., Sellappan, V., Ziegert, J. C.,
Kocer, F. Y., and Schmueser, D., 2009. Multi-
Disciplinary Design Optimization of a Composite Car
Door for Structural Performance, NVH,
Crashworthiness, Durability and Manufacturability. In
Multidiscipline Modeling in Materials and Structures.
Vol. 5, No. 1, pp. 1-28.
Yoon, D. H., Lee, J. H. and Yoo, J. H., 2002.
Development and Optimization of Automobile Parts
for Door Opening Angle Control System. In
Proceedings of the KSAE Annual Spring Conference.
pp. 1235~1240.
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
386
