
MOTION DESCRIPTORS FOR SEMANTIC VIDEO INDEXING
Markos Zampoglou
Department of Applied Informatics, University of Macedonia, Egnatia 156, Thessaloniki, Greece
Theophilos Papadimitriou
Department of International Economic Relations and Development, Democritus University of Thrace, Komotini, Greece
Konstantinos I. Diamantaras
Department of Informatics, T.E.I. of Thessaloniki, Sindos, Greece
Keywords: Video Indexing, Motion Information, Bag-of-Motion-Features, Dominant Direction Histogram, PMES.
Abstract: Content-based video indexing is a field of rising interest that has achieved significant progress in the recent
years. However, it can be retrospectively observed that, while many powerful spatial descriptors have so far
been developed, the potential of motion information for the extraction of semantic meaning has been largely
left untapped. As part of our effort to automatically classify the archives of a local TV station, we developed
a number of motion descriptors aimed at providing meaningful distinctions between different semantic
classes. In this paper, we present two descriptors we have used in our past work, combined with a novel
motion descriptor inspired by the highly successful Bag-Of-Features methods. We demonstrate the ability of
such descriptors to boost classifier performance compared to the exclusive use of spatial features, and
discuss the potential formation of even more efficient descriptors for video motion patterns.
1 INTRODUCTION
As capturing and storage devices become cheaper
and more widespread and the amount of publicly
available multimedia material increases at an ever-
greater pace, the need to manage and access this
material in an efficient way becomes imperative.
Semantic multimedia indexing and retrieval has long
been a hopeful research direction, and recently many
promising steps have been made. The MPEG-7
standard was an important landmark in this course,
by helping standardize widely used descriptors, such
as the Color Histogram (Swain and Ballard, 1991),
the Edge Direction Histogram (Jain and Vailaya,
1996), and Gabor Texture Descriptors (Bovik, Clark
and Geisler, 1990), and since then other powerful
descriptors have seen frequent use as well, such as
the Color Correlogram (Huang, Kumar, Mitra, Zhu,
and Zabih, 1999), Color Moments (Striker and
Orengo, 1995), and the Bag-Of-Features descriptors
(Zhang, Marszałek, Lazebnik, and Schmid, 2007).
Meanwhile, competitions such as TRECVID and
VIDEOCLEF provide us with a measure of success
–as well as popularity- for the various descriptors
and classifiers proposed. It is within this context that
an issue seems to arise: while spatial information is
widely used in the form of various descriptors,
motion information has faced extremely little use in
video content indexing. On the one hand the MPEG-
7 motion descriptors have seen limited application:
“Camera Motion” requires motion information from
the capturing device, which is hardly ever available;
“Motion Trajectory” is strictly region- or object-
based and is unsuitable for systems that need fixed-
length descriptors to characterize scenes; finally,
“Motion Activity,” despite attempting to capture
important information on the motion contents of a
shot, is severely hampered by its short length, which
is five attributes in all. On the other hand, motion
descriptors proposed in TRECVID systems, such as
“Motion Moments” (Cao et al, 2006) and the MCG-
ICT-CAS “Camera Motion” (Liu et al, 2007) have
not as yet gone beyond isolated contributions.
178
Zampoglou M., Papadimitriou T. and I. Diamantaras K. (2010).
MOTION DESCRIPTORS FOR SEMANTIC VIDEO INDEXING.
In Proceedings of the International Conference on Signal Processing and Multimedia Applications, pages 178-184
DOI: 10.5220/0002942601780184
Copyright
c
SciTePress
Our aim is to demonstrate the importance of
incorporating motion information in a semantic
video indexing system, by designing motion
descriptors that can significantly boost such a
system’s performance. To this end, we present a
system combining two motion descriptors from our
previous research with a novel one, and explore
these descriptors’ potential in increasing the
classification rates of a system otherwise based
exclusively on well-established spatial features.
2 THE CLASSIFIER SYSTEM
We aim at combining multiple descriptor features
for the semantic classification of video shots. The
most common way of achieving this is through a 2-
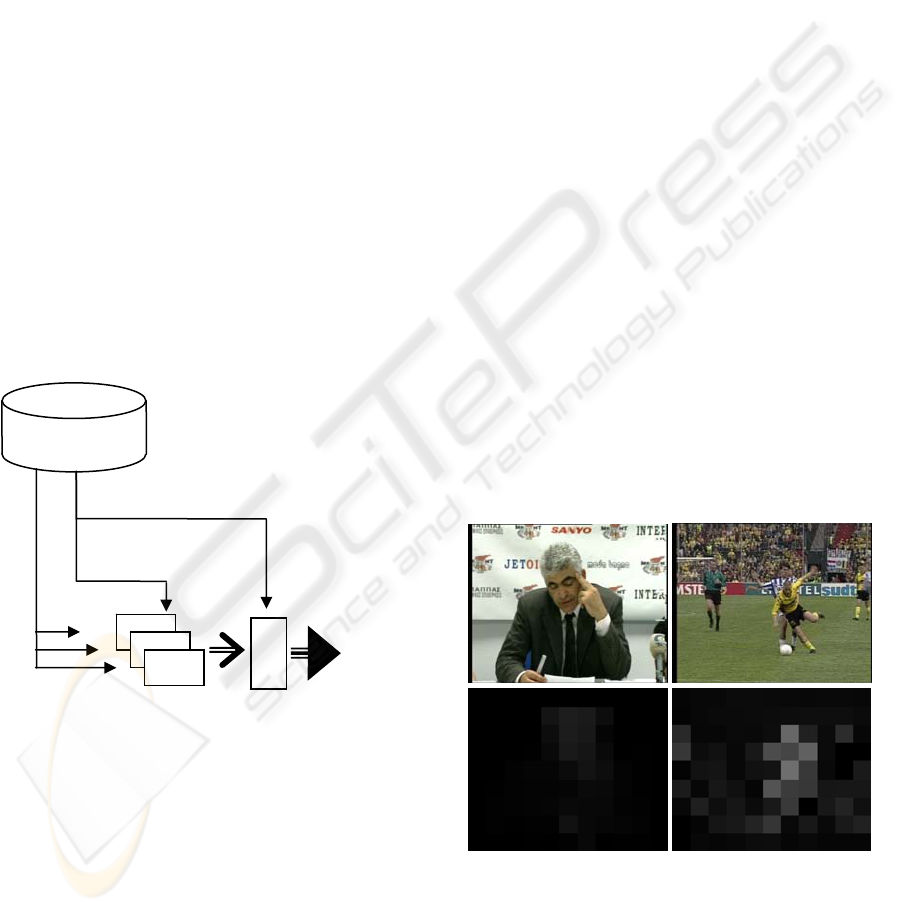
level system. In such a system (Figure 1), a number
of different classifiers, one per feature, are first
trained. From then on, each shot is characterized by
a vector of level-1 classifier outputs, with total
length equal to the number of features. Consequently
the level-2 classifier is trained on these vectors using
a different set of video sequences, and its output is
the final system output.
Figure 1: Diagram of the 2-level system.
In our work, we used Support Vector Machines s
as classifiers. The classifier parameters used in our
experiments are described in Section 4.
3 THE MOTION DESCRIPTORS
Three motion descriptors are combined in our
system: The Perceived Motion Energy Spectrum
(PMES) (Zampoglou, Papadimitriou and
Diamantaras, 2007), an extension of the Dominant
motion Direction Histogram (DDH) (Zampoglou,
Papadimitriou and Diamantaras, 2008) and a novel
Bag-of-Motion-Features descriptor (BoMF) inspired
by the widely popular Bag-Of-Features approaches.
All descriptors presented below are extracted from a
shot’s sparse motion vector field. Such a field is
formed by segmenting each frame into a number of
non-overlapping blocks and, consecutively, seeking
for each block its best match - according to some
similarity criterion- either in the next frame or in one
T frames in the future.
While it is true that simple block-matching does
not necessarily give a very accurate representation of
the actual motion events in a shot, it is still a form of
information closely related to the actual motion.
Furthermore, the fact that it’s often already
embedded in video data as part of the MPEG
compression standard makes it readily available,
and, as such, an ideal form of raw motion
information.
3.1 The Perceived Motion Energy
Spectrum
The PMES descriptor is an extension of the work in
(Ma and Zhang, 2001) for use in semantic video
indexing. This descriptor aims in giving an estimate
of foreground motion intensity for the duration of
the shot in every part of the frame.
Figure 2: Above: Indicative frames from two shots from
our database. Below: The PMES (99 values) descriptor for
the same shots.
Having extracted a shot’s motion vector field, we
begin by estimating the mixture motion energy, i.e.
the sum of foreground and background motion
Class labels
(Training set 1)
Class labels
(Training set 2)
Video shot
database
Level 1
SVMs
Level 2
SVM
Spatial and
temporal
features
System
Output
MOTION DESCRIPTORS FOR SEMANTIC VIDEO INDEXING
179

intensity. This is done by calculating the α-trimmed
mean magnitude of all motion vectors through time
that correspond to every spatial coordinate pair (i, j).
⎣⎦
()
⎣⎦
⎣⎦
∑
−
−
αMM
+αM=m
ji,ji,
mMag
αMM
=MixEn
1
2
1
(1)
In (1), M indicates the total number of
magnitudes for block (i, j) – equal to the number of
motion fields in the shot – α is the trimming
parameter (0≤α<0.5) and Mag
i,j
(m) is the magnitude
of vector m. The mixture energy characterizes each
block by the mean (excluding outliers) of all the
motion vectors that were assigned to it for the
duration of the shot. Thus, it is a measure of the
overall motion activity in the corresponding part of
the image.
The distinction between foreground and camera
motion for the formation of the PMES is based on
the assumption of the temporal discontinuity of
foreground motions. For camera motions, it is
reasonable to assume that they persist, at least in
terms of direction, for multiple frames through time.
Foreground moving objects, on the other hand, tend
to move across the screen passing through blocks.
From the perspective of a single block, this means
that a foreground object motion causes an abrupt
change in the corresponding motion vector’s
direction that lasts a short period of time. With this
in mind, we quantize vector angles into n bins and
form the angle histogram for every block (i, j)
through time. By dividing with their sum, we
estimate the angle probability distribution for each
block (i, j). We then proceed to calculate the angle
entropies:
() ()
∑
−
n
=t
ji,
tptp=AngEn
1
log
(2)
where p(t) is the probability for angle bin t.
The Angle Entropy gives a measure of the
variability of vector angles in a block through time,
and as such, based on the aforementioned
assumption, a measure of the contribution of
foreground motion in a block’s Mixture Energy. By
normalizing Angle Entropies to [0, 1] and
multiplying with their corresponding Mixture
Energies we end up with a value for each block
expressing the amount of foreground motion in that
area of the frame for all the duration of the shot
(Figure 2).
Ma and Zhang proposed averaging over
neighbourhoods, and applied it to content-based
retrieval for shots containing specific foreground
motion patterns, irrespective of their actual semantic
content. In our previous work (Zampoglou et al,
2007), we have shown that the PMES measure can
provide a powerful semantic descriptor when
combined with Support Vector Machines, for classes
whose semantic content is characterised by
distinctive motion patterns.
3.2 The Dominant Motion Direction
Histogram
The DDH is a simple descriptor aiming to express
global motion behaviour through time, based on the
assumption that, usually, the majority of pixels in a
given frame will belong to the background.
To calculate the DDH descriptor, we quantize
motion vector directions in a number of bins, and
extract the dominant one for each motion field in
every video sequence. Obviously, the total number
of such dominant values will equal the number of
motion fields. By forming the histogram of
dominant direction appearances, we can expect to
estimate the “history” of the camera motion,
provided the dominant vector coincides with the
camera motion direction.
In previous approaches, we used four bins:
Horizontal, Vertical, Diagonal and Zero Norm,
aiming to keep descriptor length at a minimum. This
was a direct result of combining different descriptors
by early fusion (feature vector concatenation), where
the individual lengths of descriptors had to be as
small as possible to reduce the overall
dimensionality. Since the system presented here is
based on late fusion (2-level SVM), we have no
reason to limit classifier length. We thus extend the
descriptor to 9 bins, 8 for the vector angles at 45°
intervals and one for zero-norm vectors. While
further increase of the length (e.g. to 17 or 33 bins)
was considered, the idea was finally rejected since
the increase in the number of bins actually increased
the descriptor’s noise sensitivity. Finally, to
compensate for different shot lengths, the DDH of
each shot is normalized to sum to 1.
3.3 The Bag-of-Motion-Features
While the two motion features described above aim
at capturing camera and foreground motion in a
global sense, we believe that local motion patterns
can also provide insights as to the contents of a shot.
To explore this possibility, we devised the Bag-of-
Motion-Features descriptor (BoMF), inspired by
previous work on spatial Bag-of-Features (BoF)
methods.
SIGMAP 2010 - International Conference on Signal Processing and Multimedia Applications
180
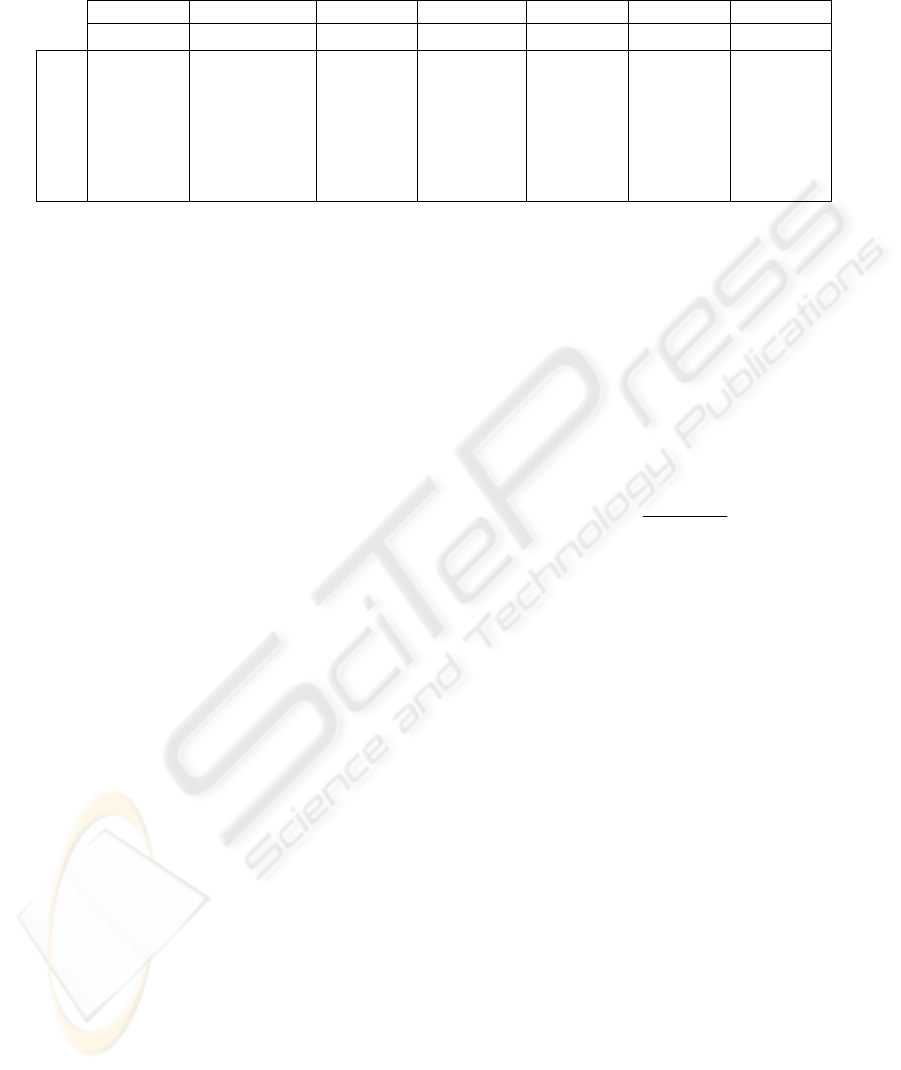
Table 1: The increases in Precision and Recall compared to the exclusive use of spatial features. Set 1: Benchmark set
consisting exclusively of spatial features. Sets 2-4: Set 1 plus the DDH, PMES and BoMF respectively. Set 5: All the
aforementioned features together.
Soccer SwimmingPool Sea Graphics Natural Urban Vehicles
Prec. Rec. Prec. Rec. Prec. Rec. Prec. Rec. Prec. Rec. Prec. Rec. Prec. Rec.
Set1
86.82 93.35 59.43 90.63 30.20 83.33 23.21 71.00 21.26 68.33 17.98 80.78 19.80 86.00
Set2
+2.98 +0.40 +7.36 +1.25 +4.73 +0.28 +3.86 +2.25 +2.68 +4.17 +1.16 +1.41 +0.34 +0.13
Set3
+2.71 +1.25 +5.49 +3.75 +2.33 +1.11 +4.11 +7.50 +0.48 +6.25 +0.84 +1.72 +0.89 +0.50
Set4
+1.07 +2.27 +5.87 +1.87 +4.87 +0.84 +0.48 +0.00 +5.51 +1.67 +1.67 +2.35 +1.05 +0.88
Set5
+5.42 +2.28 +17.74 +3.75 +8.87 +2.50 +12.75 +8.00 +7.72 +6.25 +3.80 +2.66 +2.45 +1.13
The BoF idea comes from the quite successful “Bag-
of-Words” methods for text retrieval. These methods
completely disregard the structure of a text and treat
it as unordered collection of words. Consequently,
each text is characterized by the number of instances
of each word it contains.
For the Bag-of-Features techniques, certain
adaptations had to be made: In place of words, a
number of local features are extracted from an
image; consecutively, a “dictionary” is formed by
clustering all the local features into a small number
of classes; finally, for each image, the number of
appearances of each “word” is counted, and a
histogram is formed for the corresponding
probability of appearance. This histogram is then the
image descriptor, with length equal to the number of
clusters defined in the second step. To our
knowledge, such an approach has not as yet been
applied to motion. The closest contestant, the
“Motion Words” descriptor (Hao, Yoshizawa,
Yamasaki, Shinoda, and Furui, 2008), is a traditional
local spatial SIFT (Lowe, 2004) descriptor extracted
from positions of high inter-frame differences
instead of image salient points, and thus can be
described as a local spatial descriptor using motion
simply for feature detection.
Our BoMF descriptor is formed in a similar
manner to the spatial Bag-of-Words methods, but is
aimed as a descriptor for local motion information.
First, local features are extracted from the motion
fields. In spatial bag-of-words methods, it is
common practice to extract features from salient
points in the image (Mikolajczyk and Schmid, 2005;
Quelhas et al, 2005), and, although this practice has
been challenged (Jurie and Triggs, 2005), it remains
dominant. In our case, however, the sparse motion
fields we use as raw information cannot offer the
wealth of information usually available for spatial
methods. Thus, no salient feature detection is
performed, and instead all positions in all fields are
considered. Similarly, the local descriptor will have
to be small, given the limited overall size of the
fields. The local features we use are all possible
(overlapping) 2×2 patches of motion vectors from all
motion fields, and the descriptor consists of their
corresponding four angles.
Consecutively, the local descriptors are clustered
using a k-means algorithm in order to form the
dictionary. In each step of the clustering algorithm,
the mean angle is calculated through the von Mises
distribution:
1
sin
tan
cos
n
n
n
n
θ
μ
θ
−
=
⎧
⎫
⎨
⎬
⎩⎭
∑
∑
(3)
Finally, for each shot, the local patches are
assigned to their corresponding clusters and the
descriptor vector is formed.
4 EXPERIMENTS
Our descriptors were formed as part of an effort to
automatically index the archives of the Thessaloniki
local TV station “Omega TV”. At this stage,
experiments are performed on a set of 1074
manually segmented shots of extremely varied
content. It was on this material that we performed
the descriptor evaluations.
4.1 Shot Content and Feature
Extraction
The available shots are of size 720×576 with an
average length of 178.7 frames. Their content ranges
from interviews and newscasts to a wide range of
sports shots, graphics, city shots and others. Figure 3
gives an indication of how varied the content within
each class is, due to the fact of it comes from a
real-world database with practical application in
mind.
MOTION DESCRIPTORS FOR SEMANTIC VIDEO INDEXING
181

Figure 3: Indicative frames from four shots of each of the classes tested on the system. First row: Soccer, Swimming Pool.
Second Row: Sea, Urban. Third row: Vehicles, Graphics. Bottom row: Natural. Some overlap between classes is visible,
e.g. the last “Vehicles” shot shown is also a member of “Urban”, while the last “Natural” shot is also a member of the “Sea”
class.
Sparse motion vector fields of size 11×9 vectors
were extracted from these shots using a hierarchical
block-matching algorithm, over a temporal distance
T = 8 frames, and our motion features were extracted
from these fields. The PMES descriptor has length
equal to the number of motion vectors, thus 99, and
the BoMF features were clustered to length 5000.
Besides the motion descriptors, a number of
well-established spatial features were extracted from
the shots for comparison.
Color Moments up to the
third order were extracted from the L*a*b* color
space, from 8×8 non-overlapping pixel blocks in all
channels, resulting in a 576-features long descriptor.
The
Color Histogram was extracted from the HSV
color space, with the (
H, S, V) channels quantized to
16, 4 and 4 bins respectively, for a total of 256 bins.
The
Color Correlogram was also extracted from the
same color space using the same quantization, plus 4
bins for distance, resulting in 1024 bins. The
Edge
Direction Histogram
was formed following an
application of Canny’s edge detection (Canny, 1986)
and subsequent quantization of all possible edge
directions into 72 bins of 5°, plus a 73rd bin for
counting non-edge pixels. Finally, a typical Bag-of-
Features descriptor was extracted, where salient
points were detected in local extrema of the
Difference-of-Gaussians (DoG) scale-space and
subsequently represented by a SIFT descriptor.
About 10000 local features were extracted from each
processed frame, and a dictionary of 5000 visual
words was formed by k-means clustering of all
features from all images in the database. All these
descriptors were extracted from 20 different frames
of each shot and averaged in order to capture
possible changes in time, with the exception of the
Bag-of-Features descriptor which, being
computationally more demanding, were extracted
from only 5 frames.
Even with this reduction, the computational cost
of the Bag-of-SIFT-features is significantly larger
than the BoMF descriptor, given that in the latter the
clustering is performed on 178.7×99≈17700 local
features of length 4 from each shot, in contrast to
5×10000=50000 local features of length 128 for the
SIFT features, plus the cost of feature detection.
4.2 Experiment Runs and Results
For our descriptors’ evaluation, we performed a
large number of runs over a range of semantic
classes with five different descriptor sets. In all
cases, a first-level SVM RBF classifier was trained
on each single descriptor, and the results were then
fused by a second-level polynomial SVM.
Set 1
consisted only of the five ground-truth spatial
descriptors.
Sets 2-4 were similar to the first one,
with the addition of one motion descriptor at each
time (DDH, PMES and BoMF, respectively).
Set 5
was a fusion of all spatial descriptors with all our
motion descriptors. In all cases, the 1st-level training
set was 55% of the data and the test set was 25%,
leaving 20% for training the 2nd-level committee
based on the results of the first. Seven semantic
classes were defined, and for each class/descriptor
set combination, 40 runs with random training-test
sets were performed.
SIGMAP 2010 - International Conference on Signal Processing and Multimedia Applications
182

Table 1 demonstrates the relative increase in
both measures for Sets 2-5 compared to Set 1. A
general improvement can be clearly seen, reaching
in certain situations up to almost 18%, although
there are significant differences between the various
classes. Thus, while for example in the case of
Swimming Pool shots, containing shots of swimming
and water polo, motion information gives a powerful
boost, in the case of the
Vehicles class, which is
extremely varied and is not characterized by any
specific motion patterns the overall increase is small,
while the increases from individual features can be
characterised insignificant. Similar explanations can
be given for all elements of Table 1. It cannot be
denied, however, that the addition of motion
information expressed through our descriptors has
boosted the classification potential of the overall
system.
5 CONCLUSIONS AND FUTURE
WORK
We have demonstrated the ability of motion
descriptors to boost classification performance
compared to a system based solely on spatial
descriptors. It can be observed, however, that not all
descriptors are equally effective for all classes. More
in-depth study would help clarify the strengths and
limitations of each motion descriptor presented here.
Furthermore, the descriptors presented here
could be enhanced in various ways. A dense motion
vector field could transform the PMES into a longer
and more powerful descriptor which would give a
detailed map of foreground activity. It would also
allow the local BoMF patches to be expanded
beyond size 2×2, thus giving a more detailed
description of local motion. Increase in the number
of the raw motion vectors would result in an increase
in the number of patches, and, as a result salient
feature detection could also be performed on the
motion patches prior to the local descriptor
extraction. In such an approach, the tradeoffs
between any increase in performance and the cost of
not being able to take direct advantage of MPEG-
encoded vector fields should be taken into account.
Finally, rotation invariance should be tried for
the BoMF descriptor and compared to its current
non-invariant design, while a reduction in the
temporal distance during the motion field extraction
would lead to a more detailed DDH descriptor, also
possibly allowing a narrowing of the angle bins so as
to extend of the descriptor length. Furthermore, the
DDH descriptor could be made more descriptive by
transforming it from a simple histogram of the
dominant vector directions to a histogram of actual
camera activity, as they can be derived from the
motion vector field (Tan, Saur, Kulkarni and
Ramadge, 2000).
These further steps in our research would both
lead to the formation of more expressive and
powerful descriptors for automatic video indexing,
and grant us valuable insights as to the ways motion
patterns differ between video shots of different
semantic content. It is our hope that research on the
semantic indexing and retrieval of video shots can
eventually reach a point where motion will be
considered as important as spatial information for
the success of these tasks.
REFERENCES
Bovik, A. C., Clark, M., Geisler, W. S. (1990).
Multichannel Texture Analysis Using Localized
Spatial Filters. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 12, 55-73.
Canny, J. (1986) A computational approach to edge
detection. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 8, 679–698.
Cao, J., Lan, Y., Li, J., Li, Q., Li, X., Lin, F., Liu, X., Luo,
L., Peng, W., Wang, D., Wang, H., Wang, Z., Xiang,
Z., Yuan, J., Zheng, W., Zhang, B., Zhang, J., Zhang,
L., Zhang, X. (2006). Intelligent Multimedia Group of
Tsinghua University at TRECVID 2006. In Proc. 2006
NIST TREC Video Retrieval Evaluation Workshop.
Hao, S., Yoshizawa, Y., Yamasaki, K., Shinoda, K., Furui,
S. (2008). Tokyo Tech at TRECVID 2008. In Proc.
2008 NIST TREC Video Retrieval Evaluation
Workshop.
Huang, J., Kumar, S. R., Mitra, M., Zhu, W. J., Zabih, R.
(1999). Spatial Color Indexing and Applications.
International Journal of Computer Vision, 35, 245-
268.
Jain, A. K., Vailaya, A. (1996). Image retrieval using color
and shape. Pattern Recognition, 29, 1233-1244.
Jurie, F., Triggs, B. (2005). Creating Efficient Codebooks
for Visual Recognition, Proc. ICCV '05, 10th IEEE
International Conference on Computer Vision, 1, 604-
610 .
Liu, A., Tang, S., Zhang, Y., Song, Y., Li, J., Yang, Z.
(2007). TRECVID 2007 High-Level Feature
Extraction By MCG-ICT-CAS. In Proc. 2007 NIST
TREC Video Retrieval Evaluation Workshop.
Lowe, D. G. (2004) Distinctive Image Features from
Scale-Invariant Keypoints, International Journal of
Computer Vision, 60, 91–110.
Ma, Y. F., Zhang, H. J. (2001). A new perceived motion
based shot content representation. In Proc. ICIP ’01,
8
th
IEEE International Conference on Image
Processing, 3, 426-429.
MOTION DESCRIPTORS FOR SEMANTIC VIDEO INDEXING
183

Mikolajczyk, K., Schmid, C. (2005) A Performance
Evaluation of Local Descriptors, IEEE Transactions
on Pattern Analysis and Machine Intelligence, 27,
1615-1630
Quelhas, P., Monay, F., Odobez, J.-M., Gatica-Perez, D.,
Tuytelaars, T., Van Gool, L. (2005). Modeling scenes
with local descriptors and latent aspects. In Proc.
ICCV ‘05, 10
th
IEEE International Conference on
Computer Vision, 1, 883-890.
Striker, M. Orengo, M. (1995). Similarity of Color
Images. In Proc. SPIE ’95, Storage and Retrieval for
Image and Video Databases, 2420, 381-392.
Swain, M. J., Ballard, D. H. (1991). Color Indexing,
International. Journal of Computer Vision, 7, 11-32.
Tan, Y.-P., Saur, D. D., Kulkarni, S. R., Ramadge, P. J.
(2000). Rapid estimation of camera motion from
compressed video with application to video
annotation. IEEE Transactions on Circuits and
Systems for Video Technology, 10, 133-146.
Zampoglou M., Papadimitriou T., Diamantaras, K. I,
(2007). Support Vector Machines Content-Based
Video Retrieval Based Solely on Motion Information.
In Proc. MLSP ’07, 17
th
IEEE Workshop on Machine
Learning for Signal Processing, 176-180.
Zampoglou, M., Papadimitriou, T., Diamantaras K. I.
(2008). From Low-Level Features to Semantic
Classes: Spatial and Temporal Descriptors for Video
Indexing. Journal of Signal Processing Systems,
OnlineFirst, doi: 10.1007/s11265-008-0314-3.
Zhang, J., Marszałek, M., Lazebnik, S., Schmid, C.
(2007). Local Features and Kernels for Classification
of Texture and Object Categories: A Comprehensive
Study. International Journal of Computer Vision, 73,
213-238.
SIGMAP 2010 - International Conference on Signal Processing and Multimedia Applications
184
