
GEOMETRIC FORMATIONS FOR A TEAM OF MOBILE ROBOTS
Odometric-based Maintenance Method for Heterogeneous Teams of Robots
Patricio Nebot and Enric Cervera
Robotic Intelligence Lab, Universitat Jaume I, E-12071 Castell´o de la Plana, Spain
Keywords:
Maintenance of formations, Heterogeneous team of mobile robots, Cooperation among robots.
Abstract:
One of the most important topics in multirobot formations is how to maintain the initial formations while the
robots are moving or navigating through the environment. This paper presents a new approach based on the
cooperation among a team of heterogeneous robots for the maintenance of multirobot formations. The robots
must cooperate among them in order to get that all the robots, despite their sensory power, can maintain the
formation while they are moving. To get that, the robots only have available the communication among them
and their own odometry information. One of the robots, the conductor, is in charge to drive the formation and
the rest of robots must follow it maintaining the formation. To do that, the use of “virtual points” and Bezier
curves are introduced.
1 INTRODUCTION
A considerable amount of research has been focused
on the problem of coordinated motion and cooper-
ative control of multiple autonomous robots. Re-
searchers have been trying to understand how a group
of moving robots can perform collective tasks. In fact,
this is one of the most popular fields of study in multi-
robot systems in the last years, with some applications
that are well understood including multirobot path
planning (Yamashita et al., 2000), formation genera-
tion (Arai et al., 1989), and formation keeping (Balch
and Arkin, 1998).
Coordination among a group of robots can be very
useful for many applications. One of the most impor-
tant tasks is, in motion coordination, how to move a
team of robots in an ordered way, such as maintaining
a predefined formation. One of the first approxima-
tions to multirobot formations is the leader-follower
approach (Das et al., 2002; Liu et al., 2005) where
one robot is selected as the leader and must be fol-
lowed by the rest of robots.
In this field, two works (Chiem and Cervera, 2004;
Renaud et al., 2004) were developed at the Robotic
Intelligence Lab in Castell´on. These works were use-
ful as the basis for the work explained in this paper.
The application described in this paper is a contin-
uation of the previous ones but extended to multiple
types of formations by using virtual points. The main
idea is to make it feasible for a heterogeneous team of
four robots to navigate through an environment in
such a way that the robots with sensory power help
the robots without it, that is, cooperating among them.
The control for the maintenance of the formation
is performed using a decentralized process, where
each follower robot decides which movements must
be performed in order to follow the movements of the
conductor robot, which is specialized in navigation
because it is using a laser range-finder and is ahead
in the formation. Its actual position while it is mov-
ing is sent to every follower robot. When receiving
the position, each follower robot calculates the virtual
point that it must follow. This virtual point consists of
a displacement in the position of the conductor robot
that allows it to create different formations, not only
the leader-follower line formation.
Once the virtual point is calculated, the follower
robot computes the trajectory it must follow in order
to arrive from the current position to the estimated
conductor robot relative position. For the calculation
of this trajectory, Bezier curves are considered, as in
(Chiem and Cervera, 2004; Renaud et al., 2004).
2 MAINTENANCE OF THE
FORMATION
In this section it is described how a formation can be
maintained while the robots are moving in the envi-
399
Nebot P. and Cervera E. (2010).
GEOMETRIC FORMATIONS FOR A TEAM OF MOBILE ROBOTS - Odometric-based Maintenance Method for Heterogeneous Teams of Robots.
In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pages 399-402
DOI: 10.5220/0002943403990402
Copyright
c
SciTePress
ronment. The formation is composed of a maximum
of four robots, where one of them, the conductor, is
equipped with a laser range-finder that allows it to
navigate in buildings and follow a path determined
from the map of the building, the goal point, and the
obstacles. The rest of robots have limited visibility,
that is, they only know their actual position.
Each robot determines its position in order to
maintain the formation with respect to the leader or
a displacement of the position of the leader, with a
“virtual” point. Also, they use a relative frame of ref-
erence, that is, they do not use an absolute positioning
system, only the robot with the laser uses an absolute
system in relation with the map that it uses to nav-
igate. And in relation with the communication capa-
bilities, the robots can share local and global informa-
tion to compensate for their limited visibility, in fact,
the global information shared among the robots is the
actual position of the robot with the laser, and the lo-
cal information is the actual position of each robot.
In the formation, the position of the robot follow-
ers can be controlled by the position of the conductor
if all the robots are arranged in a line formation. In
other cases, when the followers are positioned to the
right or left of the conductor, virtual points are added
to the system, as explained in (Chiem and Cervera,
2004). These virtual points are calculated by apply-
ing a displacement in the conductor position to the
left or to the right, depending on the desired forma-
tion. The followers, in this case, instead of following
the conductor must follow these virtual points. This
arrangement is shown in Figure 1.
In the approach here proposed to achieve the
maintenance of the formation, it is desired that robots
could perform the task using only the odometry in
conjunction with communication to estimate the po-
sition of the conductor with respect to each follower.
The conductor, by means of the localization task is
Figure 1: Formation using virtual points as reference for
followers.
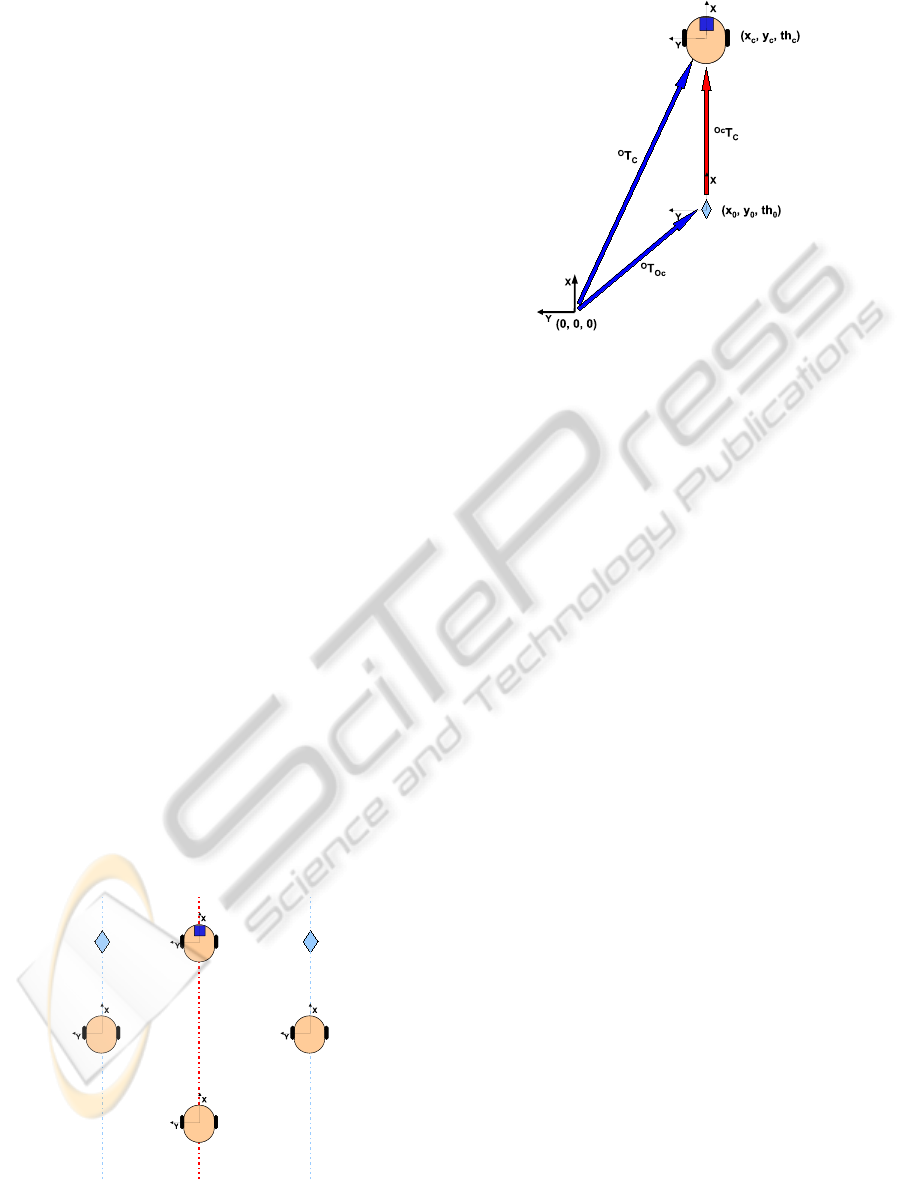
Figure 2: Calculation of the local position of the conductor.
always correctly localized in the map, and it is as-
sumed that it will follow a predefined trajectory, with
a constant, known linear velocity. In order for another
robot to follow the conductor, the linear and angular
velocities need to be computed at each time step. It
must be noted that the linear velocity of the follower
robots is not constant, due to the different radius of
their respective trajectories or because their position
may be relatively further back or further forward in
the formation.
In order to calculate the linear and angular veloc-
ities that allow the followers to move following the
movement of the conductor and maintaining the for-
mation, it is necessary to construct the corresponding
Bezier curve that defines the trajectory to be followed
by the robot. To compute the Bezier curve two posi-
tions are needed, the current position of the follower
and the current position of the conductor in relation to
the follower.
The conductor, at each step sends its own posi-
tion to the followers. The conductor is always local-
ized in the map by means of the localization task, so,
when it requires information about its position, this is
done with the coordinates of the map. The followers
are not localized on the map, so the only information
they have available is their position on their own lo-
cal system which is determined by the origin that is
fixed by their initial position. So, the conductor must
transform their global position into a position in its
local system. In Figure 2, the necessary relationships
to transform the global position into a local position
can be seen.
From the figure, it can be deducted that to calcu-
late the position in the local system it is necessary to
know the origin of the trajectory in the global system
and the actual position of the robot in the global sys-
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
400

tem.
Oc
T
C
=
O
T
Oc
−1
·
O
T
C
(1)
where
Oc
T
C
is the actual position of the conductor
in the local system,
O
T
Oc
is the origin of the trajectory
in the global system, and
O
T
C
is the actual position
of the conductor in the global system. This last posi-
tion is updated continuously by the localization task
so that the robot have always its current position on
the map.
The conductor sends its current position calcu-
lated in this way to each follower. When the follow-
ers receive the position of the conductor, they need to
calculate the position of the conductor in relation to
themselves in order to usethat information to generate
the Bezier curve necessary to calculate the velocities
which allow them to move maintaining the formation.
Each follower knows its original displacement in
the formation. This information in conjunction with
the current position of the follower and the current po-
sition of the conductor allows the robots to calculate
the relative position of the conductor in relation with
the follower. In Figure 3, the necessary relationships
to compute the conductor position are shown.
In this case, from the figure, the following equa-
tion to calculate the conductor position in relation
with the follower
F
T
C
can be obtained,
F
T
C
=
Of
T
F
−1
·
Of
T
Oc
·
Oc
T
C
(2)
where
Of
T
F
is the position of the follower in its
local system,
Of
T
Oc
is the position of the origin of the
conductor’s trajectory in relation to the origin of the
follower’s trajectory. This value is indicated by the
displacements assigned to the position of each robot
Figure 3: Calculation of the conductor’s position in relation
to the followers.
in the creation of the formation. And finally,
Oc
T
C
is
the position of the conductor in its local system. This
is the position that the conductor sends every step to
the followers.
Once this position is calculated, it is possible to
compute the Bezier curve between the current posi-
tion of the follower and the position calculated for the
conductor. It is at this moment when the virtual points
are calculated, if applicable, applying the following
formulas,
x = x− sin(δ) · dy
y = y+ cos(δ)· dy
(3)
where (x, y, δ) is the position of the conductor in
relation to the follower, and dy is the displacement in
the y axis to be applied. This generates a new point,
the virtual point, which will be used to compute the
Bezier curvethat drives the movement of the follower.
From the Bezier curve computed, the linear and
angular velocities can be obtained. The angular veloc-
ity can be computed from the curvature of the curve,
and the linear velocity is computed in order to main-
tain the distance from the conductor, applying a gain
factor proportional to the current distance from the
conductor robot. If the robots is nearer than a pre-
defined distance in the formation, it will move slower,
and if the robot is further than the predefined distance,
it will move faster.
3 TESTING AND RESULTS
The approach presented in this paper has been
tested simulating a team of robots consisting of
four Pioneer-2 mobile robots with different features
mounted on them, constituting therefore a heteroge-
neous group. In particular, only one robot is equipped
with a laser range-finder sensor and the rest of robots
do not have any type of exteroceptive sensors.
The formation control is developed in Acromovi
(Nebot and Cervera, 2005), a framework specially de-
signed for the development of distributed applications
for a team of heterogeneous mobile robots. The soft-
ware architecture gives us the ease of development of
cooperative tasks among robots, using an agent-based
platform.
In Figure 4, some examples executed for different
formations shapes are presented together with the for-
mation in which the robots are organized. Formations
from two robots up to four robots can be used.
As it can be seen, the odometry-based approach
is suitable for the development of applications using
multirobot formations. From the examples, it can be
infered that the behaviour of the robots is as desired,
GEOMETRIC FORMATIONS FOR A TEAM OF MOBILE ROBOTS - Odometric-based Maintenance Method for
Heterogeneous Teams of Robots
401

Figure 4: Results in simulation for formations with different number of robots.
and all the follower can follow the movements of the
conductor by the utilization of virtual points.
4 CONCLUSIONS
The paper describes a new method for a team of het-
erogenous robots to navigate maintaining any type of
formation by the introduction of “virtual points”. In
this application, the robots without sensory power get
support for the navigation from the robot with nav-
igation and localization facilities. In this way, all
the robots are able to follow a predefined path get-
ting help from others if necessary, that is, cooperating
among them.
Results in simulation have demonstrated that the
presented approach, where robots maintain the forma-
tion only using communication and odometry, is suit-
able for getting the maintenance of formations with
any number of robots.
ACKNOWLEDGEMENTS
Support for this research is provided by the Gener-
alitat Valenciana under project GV/2010/087, and the
Fundaci´o Caixa Castell´o - Bancaixa under project P1-
1A2008-12.
REFERENCES
Arai, T., Ogata, H., and Suzuki, T. (1989). Collision avoid-
ance among multiple robots using virtual impedance.
In Proceedings of the IEEE/RSJ International Confer-
ence on Intelligent Robots and Systems, pages 479–
485.
Balch, T. and Arkin, R. (1998). Behaviour-based formation
control for multiagent robot teams. IEEE Transaction
on Robotics and Automation, 14(6):926–993.
Chiem, S. and Cervera, E. (2004). Vision-based robot for-
mations with bzier trajectories. In Proceeedings of the
8th Conference on Intelligent Autonomous System.
Das, K., Fierro, R., Kumar, V., Ostrowski, J. P., Spletzer,
J., and Taylor, C. (2002). A vision-based formation
control framework. IEEE Transactions on Robotics
and Automation, 18(5):813–825.
Liu, S., Tan, D., and Liu, G. (2005). Distributed formation
control of robots with directive visual measurement.
In Proceedings of the IEEE International Conference
on Mechatronics & Automation, pages 1760–1765.
Nebot, P. and Cervera, E. (2005). A framework for the
development of cooperative robotic applications. In
Proceedings of the 12th International Conference on
Advanced Robotics, pages 901–906.
Renaud, P., Cervera, E., and Martinet, P. (2004). Towards a
reliable vision-based mobile robot formation control.
In Proceedings of the IEEE/RSJ International Confer-
ence on Intelligent Robots and Systems, pages 3176–
3181.
Yamashita, A., Fukuchi, M., and Ota, J. (2000). Motion
planning for cooperative transportation of a large ob-
ject by multiple mobile robots in a 3d environment. In
Proceedings of the IEEE International Conference on
Robotics and Automation, pages 3144–3151.
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
402
