
VISUAL MAP BUILDING AND LOCALIZATION WITH AN
APPEARANCE-BASED APPROACH
Comparisons of Techniques to Extract Information of Panoramic Images
Francisco Amor
´
os, Luis Pay
´
a,
´
Oscar Reinoso, Lorenzo Fern
´
andez and Jose M
a
Mar
´
ın
Departamento de Ingenier
´
ıa de Sistemas Industriales
Miguel Hern
´
andez University, Avda. de la Universidad s/n. 03202, Elche (Alicante), Spain
Keywords:
Robot mapping, Appearance-based methods, Omnidirectional vision, Spatial localization.
Abstract:
Appearance-based techniques have proved to constitute a robust approach to build a topological map of an
environment using just visual information. In this paper, we describe a complete methodology to build
appearance-based maps from a set of omnidirectional images captured by a robot along an environment.
To extract the most relevant information from the images, we use and compare the performance of several
compressing methods. In this analysis we include their invariance against rotations of the robot on the ground
plane and small changes in the environment. The main objective consists in building a map that the robot
can use in any application where it needs to know its position and orientation within the environment, with
minimum memory requirements and computational cost but with a reasonable accuracy. This way, we present
both a method to build the map and a method to test its performance in future applications.
1 INTRODUCTION
The applications that require the navigation of a robot
through an environment need the use of an internal
representation of it. Thanks to it, the robot can esti-
mate its position and orientation regarding the map it
has with the information captured by the sensors the
robot is equipped with. Omnidirectional visual sys-
tems can be stood out due to the richness of the in-
formation they provide and their relatively low cost.
Classical researches into mobile robots provided with
vision systems have focused on the extraction of natu-
ral or artificial landmarks from the image to build the
map and carry out the localization of the robot (Thrun,
2003). Nevertheless, it is not necessary to extract such
kind of landmarks to recognize where the robot is. In-
stead of this, we can process the image as a whole.
These appearance-based approaches are an interesting
option when dealing with unstructured environments
where it may be hard to find patterns to recognize the
scene. With these approaches, the comparisons are
made using the whole information of the scenes. As a
disadvantage, we have to work with a huge amount of
information, thus having a high computational cost,
so we need to study compression techniques.
There are several researches that show compres-
sion techniques that can be used. For example, PCA
(Principal Components Analysis) is a widely used
method that has demonstrated being robust applied
to image processing, (Krose et al., 2007). Due to
the fact that conventional PCA is not a rotational in-
variant method, other authors introduced a PCA ap-
proach that, although being computationally heavier,
takes into account the images with diverse orienta-
tions (Jogan and Leonardis, 2000). There are authors
that use the Fourier Transform as a generic method to
extract the most relevant information of an image. In
this field, (Menegatti et al., 2004) defines the Fourier
Signature, which is based on the 1D Discrete Fourier
Transform of the image rows and gets more robust-
ness dealing with different orientation images. On the
other hand, (Dalal and Triggs, 2005) used a method
based on the Histogram of Oriented Gradients (HOG)
to the pedestrian detection, proving that it could be a
useful descriptor for computer vision and image pro-
cessing using the objects’ appearance.
(Paya et al., 2009) present a comparative study of
appearance-based techniques. We extend this study,
taking into account three different methods: Fourier
Signature, PCA over Fourier Signature and HOG.
423
Amorós F., Payá L., Reinoso Ó., Fernández L. and Marín J. (2010).
VISUAL MAP BUILDING AND LOCALIZATION WITH AN APPEARANCE-BASED APPROACH - Comparisons of Techniques to Extract Information of
Panoramic Images.
In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pages 423-426
DOI: 10.5220/0002949404230426
Copyright
c
SciTePress

2 REVIEW OF COMPRESSION
TECHNIQUES
In this section we summarize some techniques to ex-
tract the most relevant information from a database
made up of panoramic images trying to keep the
amount of memory to a minimum.
2.1 Fourier-based Techniques
As shown in (Paya et al., 2009) it is possible to rep-
resent an image using the Discrete Fourier Transform
of each row. Taking profit of the Fourier Transform
properties, we just keep the first coefficients to rep-
resent each row since the most relevant information
concentrates in the low frequency components of the
sequence. Moreover, as we are working with omnidi-
rectional images, when the Fourier Transform of each
row is computed, another very interesting property
appears: rotational invariance. Due to the fact that
the rotation of a panoramic image is represented as
a shift of its columns, the Fourier Transform compo-
nent’s module will be the same. So, the amplitude of
the transforms is the same as the original, and just the
phase changes. Therefore, we can find out the rela-
tive rotation of two images by comparing its Fourier
coefficient phases.
2.2 PCA over Fourier Signature
PCA-based techniques have proved to be a very use-
ful compressing methods. They make possible that,
having a set of N images with M pixels each, ~x
j
∈
ℜ
Mx1
, j = 1.. . N, we could transform each image in
a feature vector (also named projection of the image)
~p
j
∈ ℜ
kx1
, j = 1 . . .N, being K the PCA features con-
taining the most relevant information of the image,
k ≤ N. However, if we apply PCA directly over the
matrix that contains the images, we obtain a database
with information just with the orientation of the robot
when capturing those images but not for other possi-
ble orientations. What we propose in this point is to
transform the Fourier Signature components instead
of the image, obtaining the compression of rotational
invariant information, joining the advantages of PCA
and Fourier techniques.
2.3 Histogram of Oriented Gradient
The Histogram of Oriented Gradient descriptors
(HOG) (Dalal and Triggs, 2005) are based on the ori-
entation of the gradient in local areas of an image. Ba-
sically it consist in computing the orientation binning
of the image by dividing it in cells, and creating the
histogram of each cell, obtaining module and orienta-
tion of each pixel. The histogram is computed based
on the gradient orientation of the pixels within the
cell, weighted with the corresponding module value.
An omnidirectional image contains the same pixels in
a row although the image is rotated, but in a different
order. So, if we calculate the histogram of cells with
the same width as the image, we obtain an array of
rotational invariant characteristics.
However, to know the relative orientation between
two rotated images vertical windows are used, with
the same height of the window, being able to vary
its width and application distance. Ordering the his-
tograms of these windows in a different way, we ob-
tain the same results as calculating the histogram of
a rotated image with an angle proportional to the dis-
tance between windows. That also will determine the
accuracy in orientation computation.
3 LOCALIZATION AND
ORIENTATION RECOVERING
In this section, we measure the goodness of each algo-
rithm by assessing the results of calculating the pose
of the robot with a new image compared to a map
created previously. All the functions and simulations
have been made using Matlab R2008b under Max OS
X. The maps have been made up of images belonging
to a database got from Technique Faculty of Biele-
feld University (Moeller et al., 2007). They were col-
lected in three living spaces under realistic illumina-
tion conditions. All of them are structured in a 10x10
cm rectangular grid. The images were captured with
an omnidirectional camera, and later converted into
panoramic ones with 41x256 pixel size. The number
of images that compose the database varies depend-
ing on the experiment, since, in order to assess the ro-
bustness of the algorithms, the distance between the
images of the grid we take will be expanded. In the
results shown in this paper, the grid used is 20x20cm,
with 204 images.
The test images used to carry out the experiments
is made up of all the available images in the database,
with 15 artificial rotations of each one (every 22.5
◦
).
11,936 images altogether . Because the pose includes
the position and orientation of the robot, both are
studied separately. Position is studied with recall and
precision measurement (Gil et al., 2009). Each chart
shows the information about if a correct location is
in the Nearest Neighbour (N.N.), i. e., if it is the
first result selected, or between Second or Third Near-
est Neighbours (S.N.N or T.N.N). Regarding the rota-
tion, we represent the results accuracy in bar graphs
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
424

depending on how much they differ from the correct
ones. If the experiment error is bigger than ±10 de-
grees, it is considered as a fail and not taken into ac-
count.
3.1 Fourier Signature Technique
The map obtained with Fourier Signature is repre-
sented with two matrices: the module and the phase of
the Fourier Coefficients. With the module matrix we
can estimate the position of the robot by calculating
the Euclidean distance of the power spectrum of that
image with the spectra of the map stored, whereas the
phase vector associated to the most similar image re-
trieved is used to compute the orientation of the robot
regarding the map created previously.
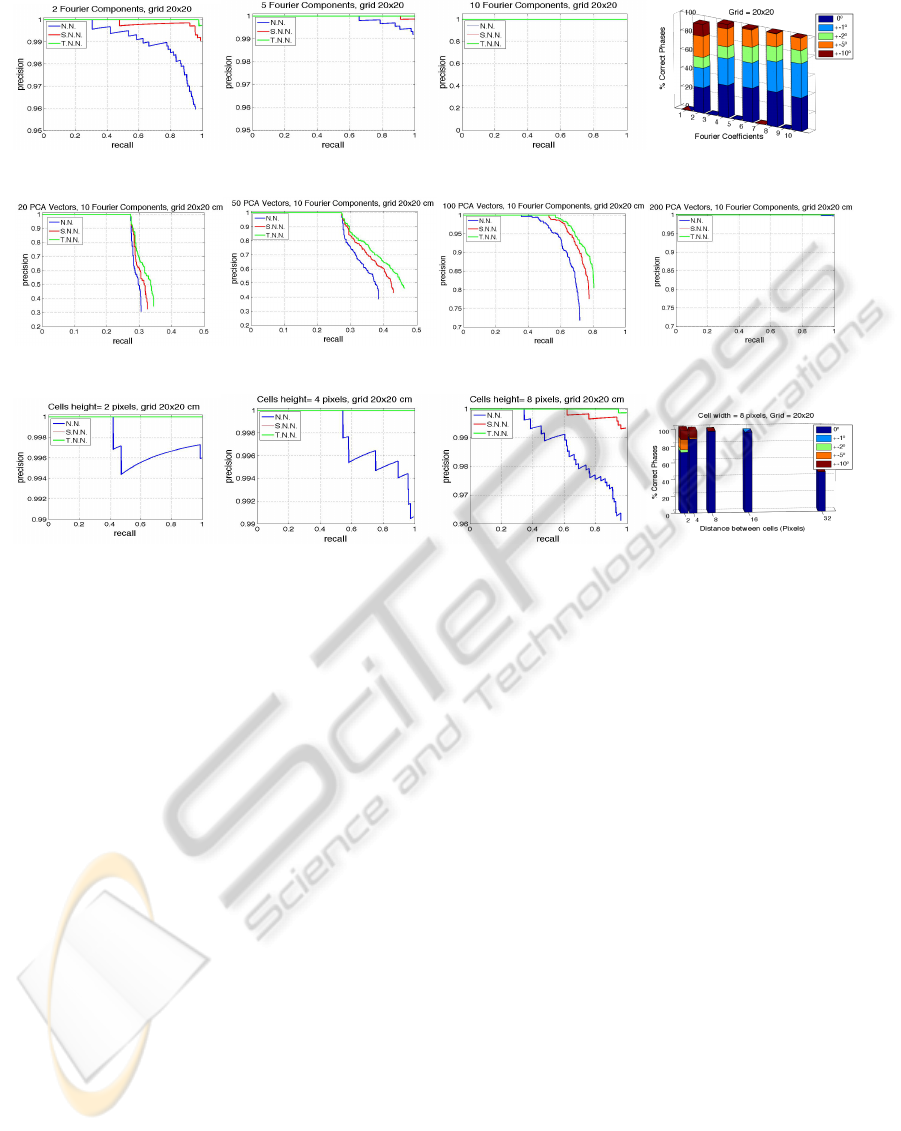
Figure 1 (a),(b),(c) show recall and precision mea-
sures. We can see that when we take more coeffi-
cients, the location is better, but there is a limit where
it is not interesting to raise the number of elements we
take because the results do not improve. The phase
accuracy (Figure 1(d)) also improves when more co-
efficients are used to compute the angle, although is
quite constant when we take 8 or more components.
It can be stressed that with just 2 components (Figure
1(a)) we have 96 percent accuracy when we study the
Nearest Neighbour, and almost 100 percent when we
keep the three Nearest Neighbours.
3.2 PCA over Fourier Signature
After applying PCA over Fourier Signature mod-
ule matrix, we obtain another matrix containing the
main eigenvectors selected, and the projection of the
map images onto the space made up with that vec-
tors. These are used to calculate the position of the
robot. On the other hand, we keep the phase matrix
of Fourier Signature directly to estimate the orienta-
tion. To know where the robot is, first the Fourier
Signature of the current position image must be com-
puted. After selecting the corresponding coefficients
of each row, we project the vector of modules onto the
eigenspace, and find the most similar image through
Euclidean distance. When the position is known, the
phase is calculated the same way than when we do not
apply PCA since the phase matrix is not modified.
As we can see in Figure 1(e),(f),(g),(h), if we are
looking for a high accuracy in the localization task,
it is required a high number of PCA eigenvectors,
what means loosing the advantages of applying this
method. Moreover, in the majority of the experi-
ments, the number of Fourier coefficients we need is
bigger than when we do not use PCA, incrementing
the memory used. Phase results are not included be-
cause the results are exactly the same as showed in
Figure 1(d) since its calculation method does not vary.
3.3 Histogram of Oriented Gradient
When a new image arrives, we need to calculate its
histogram of oriented gradient using cells with the
same size of those we used to build the map. So, the
time needed to find the pose of the robot varies de-
pending on both vertical and horizontal cells we use.
To find the location of the robot the horizontal cell in-
formation is used, whereas to compute the phase we
need the vertical cells. In both cases, the informa-
tion is found by calculating the Euclidean distance be-
tween the histogram of the new image and the stored
ones in the map. The recall-precision charts (Figure
1(i),(j),(k)) shows that the more windows to divide the
image, the better accuracy we obtain. However, it is
not a notably difference between the cases. Regard-
ing the orientation (fig 1(l)), although the results are
good, it can be stressed that, when the window appli-
cation distance is greater than 2 pixels, the results are
like binary variables, appearing just cases with zero
gap, or failures, which is to say that the error is zero
or greater than 10 degrees.
4 CONCLUSIONS
This work has focused on the comparison of different
appearance-based algorithms applied to the creation
of a dense map of a real environment, using omni-
directional images. We have presented three differ-
ent methods to compress the information in the map.
All of them have demonstrated to be valid to carry
out the estimation of the pose of a robot inside the
map. Fourier Signature has proved to be the most ef-
ficient method since taking few components per row
we obtain good results. No advantages have been
found in applying PCA to the Fourier signature, since
in order to have good results it is needed to keep the
great majority of the eigenvectors obtained and more
Fourier coefficients. In both cases the orientation ac-
curacy depends just on the number of Fourier com-
ponents, and the error in its estimation is less than
or equal to 5 degrees is the great majority of sim-
ulations. Regarding HOG, results demonstrate it is
a robust method in localization task, having slightly
worse results than Fourier algorithm ones. However
the orientations computing is less effective due to fact
that the degrees are sampled depending the number
of windows we use, determining that way its accu-
racy. This paper shows again the wide range of possi-
bilities of appearance-based methods applied to mo-
VISUAL MAP BUILDING AND LOCALIZATION WITH AN APPEARANCE-BASED APPROACH - Comparisons of
Techniques to Extract Information of Panoramic Images
425
(a) (b) (c) (d)
(e) (f) (g) (h)
(i) (j) (k) (l)
Figure 1: (a), (b), (c) Recall-Precision charts with N.N., S.N.N. and T.N.N and (d) phase accuracy using Fourier Signature
varying number of components. (e), (f), (g), (h) Recall-Precision charts with N.N., S.N.N. and T.N.N using PCA over Fourier
Signature varying number of PCA vectors. (i), (j), (k) Recall-Precision charts with N.N., S.N.N. and T.N.N and (l) phase
accuracy using HOG varying horizontal window’s height.
bile robotics, and its promising results encourage us
to continue studying them in deep, looking for new
available techniques or improving the robustness to
illumination changes for them.
ACKNOWLEDGEMENTS
This work has been supported by the Spanish govern-
ment through the project DPI2007-61197.
REFERENCES
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients fot human detection. In Proc of the IEEE
Conf on Computer Vision and Pattern Recognition,
San Diego, USA. Vol. II, pp. 886-893.
Gil, A., Martinez, O., Ballesta, M., and Reinoso, O. (2009).
A comparative evaluation of interest point detectors
and local descriptors for visual slam. Machine Vision
and Applications (MVA).
Jogan, M. and Leonardis, A. (2000). Robust localization
using eigenspace of spinning-images. In Proc. IEEE
Workshop on Omnidirectional Vision, Hilton Head Is-
land, USA, pp. 37-44. IEEE.
Krose, B., Bunschoten, R., Hagen, S., Terwijn, B., and
Vlassis, N. (2007). Visual homing in enviroments with
anisotropic landmark distrubution. In Autonomous
Robots, 23(3), 2007, pp. 231-245.
Menegatti, E., Maeda, T., and Ishiguro, H. (2004). Image-
based memory for robot navigation using properties of
omnidirectional images. In Robotics and Autonomous
Systems. Vol. 47, No. 4, pp. 251-276.
Moeller, R., Vardy, A., Kreft, S., and Ruwisch, S. (2007).
Visual homing in enviroments with anisotropic land-
mark distrubution. In Autonomous Robots, 23(3),
2007, pp. 231-245.
Paya, L., Fernandez, L., Reinoso, O., Gil, A., and Ubeda,
D. (2009). Appearance-based dense maps creation.
In 6th Int Conf on Informatics in Control, Automation
and Robotics ICINCO 2009. Ed. INTICC PRESS - pp.
250-255.
Thrun, S. (2003). Robotic mapping: A survey, in exploring
artificial intelligence. In The New Milenium, pp. 1-35.
Morgan Kaufmann Publishers, San Francisco, USA.
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
426
