
REAL-TIME CONTROL OF REWINDING MACHINE
Comparison of Two Approaches
Karel Perutka
Faculty of Applied Informatics, Tomas Bata University in Zlin, nam. T.G.M. 5555, Zlin, Czech Republic
Keywords: Nonlinear control, MATLAB, Off-line identification, On-line identification, Real-time control, Self-tuning
control.
Abstract: The paper deals with two simple approaches applied to the real-time control of rewinding machine and their
comparison. In brief, the comparison of results obtained by nonlinear real-time control with pre-
identification, and by adaptive real-time control with on-line identification was performed. The rewinding
machine was controlled by PC from MATLAB’s Real-Time Toolbox using technological card, terminal
board and wires. Each of two used approaches has its advantages and its drawbacks, which was proven, and
nonlinear control seemed to be more suitable for the rewinding machine, minimally because of the action
signal history from the nonlinear control, the action is more consistent.
1 INTRODUCTION
As is stated in abstract, the comparison of two
approaches of rewinding machine’s real-time control
was performed. Firstly, let us provide introduction to
the control methods which were used.
Many processes can be marked as multivariable
systems. For such processes, the centralized
controller is commonly used because it provides the
best closed loop performance. However, the
centralized controller is less fault tolerant than the
decentralized controller. This is the main reason why
decentralized control strategy is often preferred. The
used strategy is based on the linear model of the
nonlinear plant and the design of a decentralized
controller for this linear model (Li, et al., 2000). Li,
et al., (2000) mentions that the plant decomposition
is crucial for decentralized design and it is not
always possible to obtain satisfactory decentralized
control systems using a simple physical
decomposition. However, the decentralized
approach has one big disadvantage due to the
decomposition, the reduction of control performance
due to the restricted controller structure (Cui and
Jacobsen, 2002). But decentralized control is
popular in practice, see (Balachandran and
Chidambaram, 1997).
Many nonlinear systems can be identified and
controlled as linear systems around the steady state
or working points. Nice application of feedback
control was performed by Cottenceau et al.
(Cottenceau et al., 2001). When nonlinear control is
used, it possible to enlarge the working interval even
in the case the linear control does not guarantee the
sufficient quality of control. Moreover, some
systems have nonlinearities, which cannot be
linearly approximated, for instance friction, etc.
Therefore, the necessity of nonlinear control occurs.
Nonlinear system is a set of elements of system,
in which at least one of the elements is nonlinear
(Modrlak, 2008).
Some nonlinear systems can be approximated by
linear systems within the defined range and when
specific conditions hold on. In practice, such
systems can be divided into linear and nonlinear
part. The dynamics of system can be approximated
by linear model and its nonlinear part by the
nonlinear characteristics. The superposition is not
valid for the nonlinear systems, the output of
Hammerstein model is different from the output of
Weiner model (Lin, 1994).
This paper uses the simple nonlinear control
introduced by Chen et al. (Chen et al., 2006) for
nonlinear real-time control of rewinding machine.
The simple nonlinear control was applied for
instance by Perutka and Dostalek (2009), the
application is in MATLAB because it is nice tool for
Control Engineering at universities (Perutka,
Hezcko, 2007).
197
Perutka K. (2010).
REAL-TIME CONTROL OF REWINDING MACHINE - Comparison of Two Approaches.
In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pages 197-200
DOI: 10.5220/0002949501970200
Copyright
c
SciTePress

2 THEORETICAL
BACKGROUND
2.1 Simple Nonlinear Controller
This method was introduced by Chen et al. (Chen, et
al., 2006) and verified by Perutka and Dostalek
(Perutka and Dostalek, 2009). The controller
consists of three parts, “the pure controller” and
generator giving together the nonlinear controller
and the system model inversion (Chen, et al., 2006).
2.2 Pre-identification
Suppose the existence of continuous-time
multivariable N x N system S(t). Moreover, let as
assume the vector of reference signals R(t), its
values are send to the input of the system S(t). They
are same and for the same time as those one which
are going to be used during the control. Each time
interval of history of control of the system S(t),
where all reference signals have the constant value,
is identified separately. Every identification element
is identified several times, every time with different
identification algorithm, and the obtained model is
verified with the measured data. The obtained model
which gives the best agreement with the measured
data is used for control.
2.3 Self-tuning Control
Self-tuning controllers (STC) belong to the class of
adaptive control systems. Self-tuning controllers are
based on on-line identification and on tuning the
controller parameters with respect to identified
changes in controlled systems (Bobal et al., 2005).
2.4 On-line Identification
The action (input) signal u(t) is continuously
approximated by Lagrange regression polynomial at
the interval of given length during entire control.
After the polynomial approximation, the
approximating polynomial derivation u
(i)
L
(t) is
counted. It is sampled in purpose to count the values
of subsystem parameters using recursive
identification algorithm.
2.4.1 Recursive Least-squares and Recursive
Instrumental Variable
Least squares method is generally known, for
instance presented by Bobal et al. (Bobal et al.,
2005). Instrumental variable method is a
modification of the least squares method. It does not
allow us to obtain the properties of noise, but it has
inferior presumptions than the least square method
(Zhu & Backx, 1993).
2.5 Suboptimal Linear Quadratic
Tracking Controller
Usage of adequate method of controller parameters
computation is crucial for control. Linear quadratic
control is a reliable method verified by many
publications, for instance by Casavola et al.
(Casavola et al., 1991), the used suboptimal method
was introduced by Dostal (Dostal, 1997).
3 SHORT DESCRIPTION OF
USED APPROACHES
The overall controlled system was controlled in the
view of decentralized control. Nice paper useful to
decentralized control was written by Seatzu and Usai
(Seatzu and Usai, 2002).
3.1 Approach 1
This approach is a combination of simple nonlinear
control (chap. 2.1) and pre-identification (chap. 2.2).
Firstly, the pre-identification run and it provided the
initial parameters estimates for the model used
during nonlinear control.
3.2 Approach 2
Approach 2 is de facto self-tuning control in real-
time. The controller parameters were counted
according to the suboptimal linear quadratic method
(chap. 2.5), identification was realized using least
squares and instrumental variable (chap. 2.2.1).
4 MACHINE DESCRIPTION
The real-time control was realized on CE108
Coupled Drives Apparatus, see figure 1, which is
manufactured by TecQuipment Ltd., United
Kingdom. The rewinding machine is adapted for its
usage in the laboratory. The properties of the
apparatus had been studied in detail and its model in
MATLAB – SIMULINK environment was created
(Perutka, Dolezel 2009). The speed and tension of
thread during spooling is an example of rewinding
process. This situation is modified for laboratory
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
198

experiments where the flexible belt is fastened on
three wheels. Speed of two wheels is directly
proportional to the number of revolutions of the
servo-motors. Third wheel may move, because it is
fixed on the moving jib which is hung on the spring.
The measurement of speed and tension is indirect
via the angle of the moving jib, from -10 deg to 10
deg, which correspond the voltage from -10 V to 10
V. The control voltages of the amplifiers of the
servo-motors, which are bi-directional, are the
inputs. The outputs are four, the voltage of the speed
of two servo-motors, or two wheels respectively, and
the voltage of the tension and the speed of the belt,
or angular deflection and speed of 3rd wheel
respectively. The apparatus is connected to PC via
technological card Advantech. The control is
realized in MATLAB using Real Time Toolbox.
Figure 1: CE108 Rewinding Machine.
5 REAL-TIME TOOLBOX
DESCRIPTION
Real Time Toolbox is used for real-time control and
it is based on a high performance real-time kernel
and drivers for popular A/D and D/A boards, the
toolbox includes drivers for more than 300 industry-
standard data acquisition boars. The real-time kernel
allows us to use sampling frequencies up to 66 kHz
with no external clock source required. Besides
standard analog and digital I/O many specialized
devices are also supported. Multiple boards of the
same or different type can be used simultaneously to
offer sufficient I/O even for complex industrial
applications (Real-time Toolbox: Introduction,
2010).
6 EXPERIMENTAL PART
In figures 2-5 there are obtained results of real-time
control of rewinding machine. In these figures, the
meaning of the symbols is following: w
1
– set-point
of first subsystem, u
1
– action signal of first
subsystem, y
1
– output signal of first subsystem, w
1
– set-point of second subsystem, u
1
– action signal
of second subsystem, y
1
– output signal of second
subsystem.
Figures 2 and 3 provide the results obtained by
adaptive real-time control. It was the self-tuning
control with online identification using least squares
(figure 2) and instrumental variable method (figure
3). The suboptimal linear quadratic tracking was
used as the method of controller parameters tuning.
Figure 2: Adaptive real-time control – 1
st
subsystem.
Figure 3: Adaptive real-time control – 2
nd
subsystem.
Figures 4 and 5 provide the results obtained by
nonlinear real-time control, the combination of
simple nonlinear controller (Chen et al., 2006) with
pre-identification. The pre-identification provided
the initial estimates of the used model’s parameters.
Figure 4: Nonlinear real-time control – 1
st
subsystem.
REAL-TIME CONTROL OF REWINDING MACHINE - Comparison of Two Approaches
199
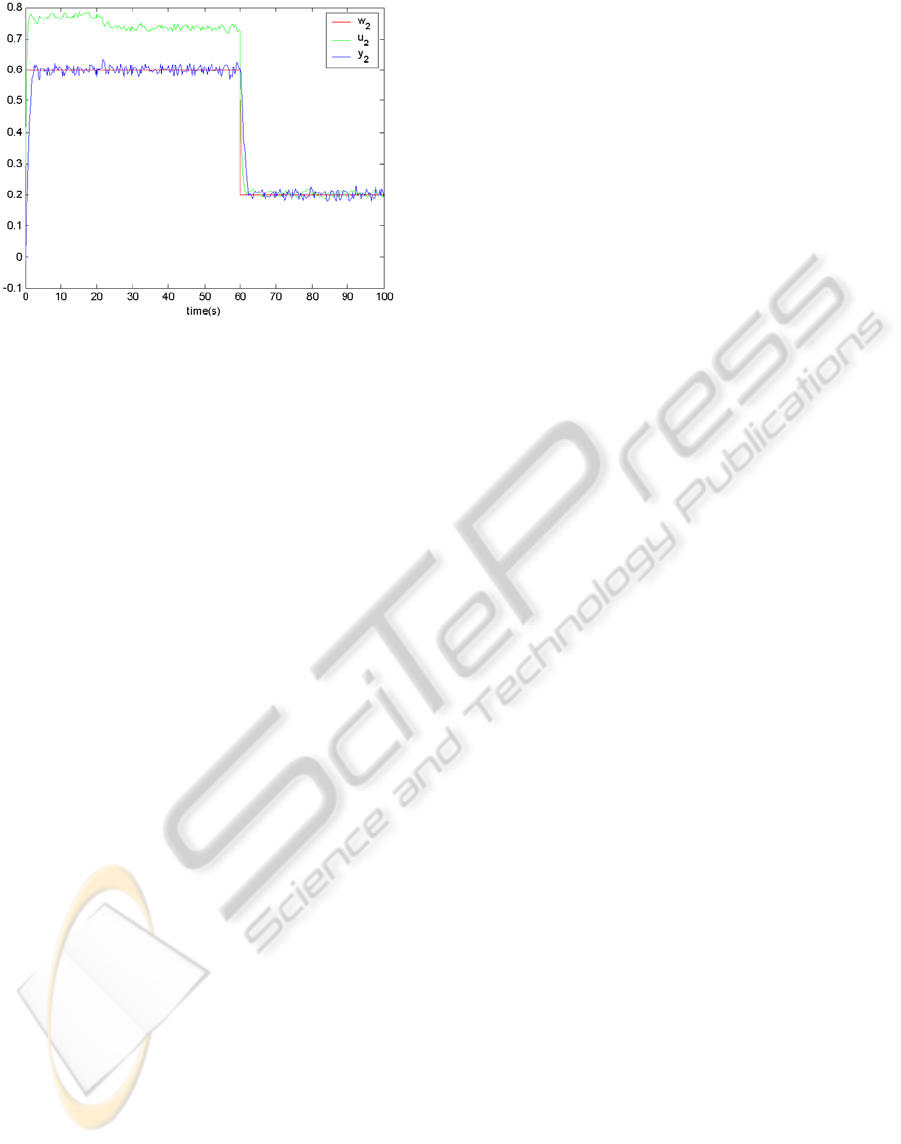
Figure 5: Nonlinear real-time control – 2
nd
subsystem.
Both used methods of real-time control provided
the satisfactory results and they can be used for this
machine, but there are some differences which
should be mentioned. Nonlinear real-time control is
less biased and seemed to be more suitable. The
usage of pre-identification decreased the unwanted
overshooting caused by interactions. Moreover, the
adaptive real-time control is notably more sensitive
to the changes of model parameters, whilst the used
nonlinear real-time control does not need the change
of model parameters.
7 CONCLUSIONS
The paper presented results of real-time control of
rewinding machine by two approaches together with
the necessary theoretical background. The nonlinear
real-time control seems to be more suitable, but
adaptive real-time control is also possible to use,
because it is more sensitive on the changes during
control.
ACKNOWLEDGEMENTS
The author would like to mention MSM7088352102
grant, from which the work was supported.
REFERENCES
Balachandran, R., Chidambaram, M., 1997. Decentralized
control of crude unit distillation towers. In Computers
and Chemical Engineering, 21, pp. 783-786.
Bobal, V., Böhm, J., Fessl, J., Machacek, J., 2005. Digital
Self-tuning Controllers. Springer-Verlag London
Limited.
Casavola, A., Grimble, M. J., Mosca, E., Nistri, P., 1991.
Continuous-time LQ regulator design by polynomial
equations. In Automatica, 27, pp. 555-558.
Chen, Ch.-T.; Chuang, Y.-Ch., Hwang, Ch., 2006. A
Simple Nonlinear Control Strategy for Chemical
Processes. In Proc. of the 6th Asian Control
Conference, Inna Grand Bali Beach Hotel, Bali,
Indonesia, ISBN 979-15017-0.
Cottenceau, B., Hardouin, L., Boimond, J.-L., Ferrier, J.-
L., 2001. Model reference control for time event
graphs in diods. In Automatica, 37, pp. 1451-1458.
Cui, H., Jacobsen, E.W., 2002. Performance limitations in
decentralized control. In Journal of Process Control,
12, pp. 485-494.
Dostal, P., 1997. An approach to control of processes of
chemical technology. Inaugural dissertation. TU Brno,
Brno.
Li, H., Lee, P. L., Bahri, P., Cameron, I.T., 2000.
Decentralized control design for nonlinear plants: ν–
metric approach. In Computers and Chemical
Engineering, 24, pp. 273-278.
Lin, C.-F., 1994. Advanced Control System Design. New
Jersey, USA: Prentice Hall, 1994. ISBN 0-13-006305-
3.
Modrlak, O.: Theory of automatic control II: Nonlinear
systems. Lectures notes. [on line] Technical University
of Liberec, [cit. 02-02-2010], available at
http://www.fm.vslib.cz/~krtsub/fm/modrlak/pdf/tar2_n
el.pdf.
Perutka, K., Dolezel, K., 2009. Simulation Model of
CE108 Coupled Drives Apparatus. In MATHMOD
2009, 6th Vienna Conference on Mathematical
Modelling, Vienna, Austria. ARGESIM.
Perutka, K., Dostalek, P., 2009. Simple Decentralized
Autonomous Adaptive Nonlinear Real-time Controller
with Controller Source Code Optimization: Case
Study. In ISADS 2009, 9th IEEE International
Symposium on Autonomous Decentralized Systems,
Athens, Greece. IEEE.
Perutka, K., Heczko, K., 2007. Teaching of MATLAB
Programming Using Complex Game. In FIE2007,
37th IEEE/ASEE Frontiers in Education Conference,
Milwaukee, WI, USA. IEEE.
Real-time Toolbox: Introduction. [on line] Humusoft, [cit.
03-30-2010], available at http://www.humusoft.cz/
produkty/rtt/.
Seatzu, C., Usai, G., 2002. A decentralized volume
variations observer for open channels. In Applied
Mathematical Modelling, 26, pp. 975-1001.
Zhu, Y., Backx, T., 1993. Identification of Multivariable
Industrial Processes for Simulation, Diagnosis and
Control
. Springer-Verlag Ltd., London, United
Kingdom
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
200
